CN110672549A - Imaging method and device - Google Patents
Imaging method and deviceDownload PDFInfo
- Publication number
- CN110672549A CN110672549ACN201910954538.9ACN201910954538ACN110672549ACN 110672549 ACN110672549 ACN 110672549ACN 201910954538 ACN201910954538 ACN 201910954538ACN 110672549 ACN110672549 ACN 110672549A
- Authority
- CN
- China
- Prior art keywords
- imaging
- measured object
- measured
- terahertz wave
- dimensional
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000003384imaging methodMethods0.000titleclaimsabstractdescription313
- 230000033001locomotionEffects0.000claimsabstractdescription23
- 239000000523sampleSubstances0.000claimsdescription99
- 238000004590computer programMethods0.000claimsdescription33
- 238000000034methodMethods0.000claimsdescription30
- 238000010586diagramMethods0.000description13
- 230000008569processEffects0.000description10
- 230000006870functionEffects0.000description7
- 238000004891communicationMethods0.000description6
- 238000012545processingMethods0.000description6
- 238000005259measurementMethods0.000description5
- 230000004044responseEffects0.000description4
- 230000008878couplingEffects0.000description3
- 238000010168coupling processMethods0.000description3
- 238000005859coupling reactionMethods0.000description3
- 238000003325tomographyMethods0.000description3
- 230000009286beneficial effectEffects0.000description2
- 230000005540biological transmissionEffects0.000description2
- 238000012937correctionMethods0.000description2
- 238000001514detection methodMethods0.000description2
- 230000003287optical effectEffects0.000description2
- 238000012360testing methodMethods0.000description2
- 230000003190augmentative effectEffects0.000description1
- 230000000903blocking effectEffects0.000description1
- 230000001413cellular effectEffects0.000description1
- 238000013461designMethods0.000description1
- 230000000694effectsEffects0.000description1
- 238000005516engineering processMethods0.000description1
- 238000001093holographyMethods0.000description1
- 230000000977initiatory effectEffects0.000description1
- 230000005865ionizing radiationEffects0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 238000012544monitoring processMethods0.000description1
- 239000013307optical fiberSubstances0.000description1
- 230000000149penetrating effectEffects0.000description1
- 230000003595spectral effectEffects0.000description1
Images








Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N21/25—Colour; Spectral properties, i.e. comparison of effect of material on the light at two or more different wavelengths or wavelength bands
- G01N21/31—Investigating relative effect of material at wavelengths characteristic of specific elements or molecules, e.g. atomic absorption spectrometry
- G01N21/35—Investigating relative effect of material at wavelengths characteristic of specific elements or molecules, e.g. atomic absorption spectrometry using infrared light
- G01N21/3581—Investigating relative effect of material at wavelengths characteristic of specific elements or molecules, e.g. atomic absorption spectrometry using infrared light using far infrared light; using Terahertz radiation
- G01N21/3586—Investigating relative effect of material at wavelengths characteristic of specific elements or molecules, e.g. atomic absorption spectrometry using infrared light using far infrared light; using Terahertz radiation by Terahertz time domain spectroscopy [THz-TDS]
Landscapes
- Physics & Mathematics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Health & Medical Sciences (AREA)
- Toxicology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本申请属于太赫兹波成像技术领域,尤其涉及一种成像方法及装置。The present application belongs to the technical field of terahertz wave imaging, and in particular, relates to an imaging method and device.
背景技术Background technique
太赫兹波是介于红外与微波之间的一个电磁波频段,通常将0.1THz~10THz定义为“THz Gap”,即太赫兹波段。这个波段的电磁波兼具可见光的方向性和微波的穿透能力,具有波长短,没有电离辐射产生、包含丰富的光谱信息等特点,在平面太赫兹波成像的基础上如能获取被测物体的(3D)立体信息,则可以更好地得到被测物体的三维图像。因此,如何利用太赫兹波对被测物体进行全方位的立体成像是目前亟需解决的问题。Terahertz wave is an electromagnetic wave band between infrared and microwave, usually 0.1THz ~ 10THz is defined as "THz Gap", that is, terahertz band. Electromagnetic waves in this band have both the directivity of visible light and the penetrating ability of microwaves. They have the characteristics of short wavelength, no ionizing radiation, and rich spectral information. On the basis of planar terahertz wave imaging, it is possible to obtain the information of the measured object. (3D) stereo information, the three-dimensional image of the measured object can be better obtained. Therefore, how to use terahertz waves to perform omnidirectional stereo imaging of the measured object is an urgent problem to be solved at present.
发明内容SUMMARY OF THE INVENTION
本申请实施例提供了一种成像方法及装置,可以解决如何利用太赫兹波对被测物体进行全方位的立体成像的问题。The embodiments of the present application provide an imaging method and device, which can solve the problem of how to use terahertz waves to perform omnidirectional stereo imaging of a measured object.
第一方面,本申请实施例提供了一种成像方法,应用于成像装置,成像方法包括:In a first aspect, an embodiment of the present application provides an imaging method, which is applied to an imaging device, and the imaging method includes:
在第一成像位置获取被测物体的位置信息,并根据所述位置信息获取所述被测物体的三维位置模型;所述第一成像位置根据所述成像装置的预设运动轨迹进行设置;Obtain position information of the measured object at a first imaging position, and obtain a three-dimensional position model of the measured object according to the position information; the first imaging position is set according to the preset motion trajectory of the imaging device;
根据所述被测物体的三维位置模型调整所述第一成像位置,得到第二成像位置;Adjust the first imaging position according to the three-dimensional position model of the measured object to obtain a second imaging position;
在第二成像位置获取所述被测物体反射的太赫兹波信号,并基于所述太赫兹波信号进行三维图像重建,得到所述被测物体的三维图像。The terahertz wave signal reflected by the measured object is acquired at the second imaging position, and a three-dimensional image reconstruction is performed based on the terahertz wave signal to obtain a three-dimensional image of the measured object.
应理解,上述预设运动轨迹为能够全方位扫描被测物体的运动轨迹。It should be understood that the above-mentioned preset motion trajectory is a motion trajectory capable of scanning the object to be measured in all directions.
应理解,上述预设运动轨迹上设置有多个第一成像位置,通过多个第一成像位置来获取被测物体的位置信息能够全方位的确定被测物体的位置信息。It should be understood that a plurality of first imaging positions are set on the above-mentioned preset motion trajectory, and obtaining the position information of the measured object through the plurality of first imaging positions can comprehensively determine the position information of the measured object.
应理解,第二成像位置的个数与第一成像位置的个数相同,根据三维位置模型对每个第一成像位置进行调整,进而得到每个第一成像位置对应的第二成像位置。It should be understood that the number of the second imaging positions is the same as the number of the first imaging positions, and each first imaging position is adjusted according to the three-dimensional position model, thereby obtaining a second imaging position corresponding to each first imaging position.
在第一方面的一种可能的实现方式中,在第一成像位置获取所述被测物体的位置信息,并根据所述位置信息获取所述被测物体的三维位置模型之前,还包括:In a possible implementation manner of the first aspect, before acquiring the position information of the measured object at the first imaging position, and acquiring the three-dimensional position model of the measured object according to the position information, the method further includes:
调整所述成像装置处于初始姿态。Adjust the imaging device to an initial attitude.
进一步地,上述成像装置包括机械臂、成像探头、平铺设置的水平转台以及支撑架,所述机械臂的一端连接所述水平转台,所述机械臂的另一端连接所述成像探头;Further, the above-mentioned imaging device includes a mechanical arm, an imaging probe, a horizontal turntable and a support frame arranged horizontally, one end of the mechanical arm is connected to the horizontal turntable, and the other end of the mechanical arm is connected to the imaging probe;
所述调整所述成像装置处于初始姿态,包括:The adjusting the imaging device to be in an initial posture includes:
控制所述水平转台移动至第一初始位置;controlling the horizontal turntable to move to a first initial position;
控制所述机械臂运动并调整所述成像探头,使所述成像探头到支撑架的标识圆点的垂直距离为预定值。The movement of the robotic arm is controlled and the imaging probe is adjusted so that the vertical distance from the imaging probe to the marked dot of the support frame is a predetermined value.
进一步地,所述在第一成像位置获取所述被测物体的位置信息,并根据所述位置信息获取所述被测物体的三维位置模型,包括:Further, obtaining the position information of the measured object at the first imaging position, and obtaining the three-dimensional position model of the measured object according to the position information, includes:
控制所述水平转台沿第一扫描轨迹运动至第一成像工位;controlling the horizontal turntable to move to the first imaging station along the first scanning track;
控制所述机械臂驱动所述成像探头沿第二扫描轨迹运动至各第一成像位置;controlling the robotic arm to drive the imaging probe to move to each first imaging position along the second scanning trajectory;
控制所述成像探头在各第一成像位置获取所述被测物体表面至所述成像探头的距离;controlling the imaging probe to obtain the distance from the surface of the object to be measured to the imaging probe at each first imaging position;
根据所述被测物体表面至所述成像探头的距离绘制所述三维位置模型。The three-dimensional position model is drawn according to the distance from the surface of the object to be measured to the imaging probe.
进一步地,所述根据所述被测物体的三维位置模型调整所述第一成像位置,得到第二成像位置,包括:Further, the adjusting the first imaging position according to the three-dimensional position model of the measured object to obtain the second imaging position includes:
根据所述被测物体表面至所述成像探头的距离及所述成像探头的焦距调整所述成像探头与所述支撑台的距离;Adjust the distance between the imaging probe and the support base according to the distance from the surface of the measured object to the imaging probe and the focal length of the imaging probe;
根据所述三维位置模型确定被测物体的表面倾斜度,并调整所述成像探头至垂直于被测物体表面的第二成像位置。The surface inclination of the object to be measured is determined according to the three-dimensional position model, and the imaging probe is adjusted to a second imaging position perpendicular to the surface of the object to be measured.
进一步地,在所述在第一成像位置获取所述被测物体的位置信息,并根据所述位置信息获取所述被测物体的三维位置模型之后,还包括:Further, after obtaining the position information of the measured object at the first imaging position, and obtaining the three-dimensional position model of the measured object according to the position information, the method further includes:
在第一成像位置获取所述被测物体的可见光图像。A visible light image of the measured object is acquired at the first imaging position.
进一步地,在所述在第二成像位置获取所述被测物体反射的太赫兹波信号,并基于所述太赫兹波信号进行三维图像重建,得到所述被测物体的三维图像之后,还包括:Further, after acquiring the terahertz wave signal reflected by the measured object at the second imaging position, and performing three-dimensional image reconstruction based on the terahertz wave signal to obtain the three-dimensional image of the measured object, further comprising: :
判断所述太赫兹波信号是否被阻断;determining whether the terahertz wave signal is blocked;
若所述太赫兹波信号被阻断,则标识所述太赫兹波信号被阻断的第二成像位置;If the terahertz wave signal is blocked, identifying a second imaging position where the terahertz wave signal is blocked;
根据被标识的第二成像位置获取对应的可见光图像;Acquiring a corresponding visible light image according to the identified second imaging position;
根据所述可见光图像对所述被测物体的三维图像进行修正。The three-dimensional image of the measured object is corrected according to the visible light image.
第二方面,本申请实施例提供了一种成像装置,包括:In a second aspect, an embodiment of the present application provides an imaging device, including:
位置获取模块,用于在第一成像位置获取被测物体的位置信息,并根据所述位置信息获取所述被测物体的三维位置模型;所述第一成像位置根据所述成像装置的预设运动轨迹进行设置;a position acquisition module, configured to acquire position information of the object to be measured at a first imaging position, and obtain a three-dimensional position model of the object to be measured according to the position information; the first imaging position is preset according to the imaging device Set the motion track;
调整模块,用于根据所述被测物体的三维位置模型调整所述第一成像位置,得到第二成像位置;an adjustment module, configured to adjust the first imaging position according to the three-dimensional position model of the measured object to obtain a second imaging position;
重建模块,用于在第二成像位置获取所述被测物体反射的太赫兹波信号,并基于所述太赫兹波信号进行三维图像重建,得到所述被测物体的三维图像。A reconstruction module, configured to acquire a terahertz wave signal reflected by the measured object at the second imaging position, and perform three-dimensional image reconstruction based on the terahertz wave signal to obtain a three-dimensional image of the measured object.
第三方面,本申请实施例提供了一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面所述的成像方法的各个步骤。In a third aspect, an embodiment of the present application provides a terminal device, including a memory, a processor, and a computer program stored in the memory and executable on the processor, when the processor executes the computer program Various steps of the imaging method as described in the first aspect above are implemented.
第四方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的成像方法的各个步骤。In a fourth aspect, an embodiment of the present application provides a computer-readable storage medium, where the computer-readable storage medium stores a computer program, and when the computer program is executed by a processor, implements the imaging method according to the first aspect above of the various steps.
第五方面,本申请实施例提供了一种计算机程序产品,当计算机程序产品在终端设备上运行时,使得终端设备执行上述第一方面中任一项所述的成像方法。In a fifth aspect, an embodiment of the present application provides a computer program product that, when the computer program product runs on a terminal device, enables the terminal device to execute the imaging method described in any one of the first aspects above.
可以理解的是,上述第二方面至第五方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。It can be understood that, for the beneficial effects of the foregoing second aspect to the fifth aspect, reference may be made to the relevant descriptions in the foregoing first aspect, and details are not described herein again.
本申请实施例与现有技术相比存在的有益效果是:通过先获取被测物体的位置信息后调整成像装置的位置,再获取对应的太赫兹波信号来生成该被测物体的三维图像,且第一成像位置和第二成像位置是根据成像装置的预设运动轨迹来设置的,因此能够全方位地获取到被测物体的位置信息和太赫兹波信号,进而实现对被测物体进行全方位的三维成像。Compared with the prior art, the beneficial effect of the embodiment of the present application is that: by first obtaining the position information of the measured object, then adjusting the position of the imaging device, and then obtaining the corresponding terahertz wave signal, a three-dimensional image of the measured object is generated, Moreover, the first imaging position and the second imaging position are set according to the preset motion trajectory of the imaging device, so the position information and terahertz wave signal of the measured object can be obtained in all directions, thereby realizing the full detection of the measured object. Azimuth 3D imaging.
附图说明Description of drawings
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。In order to illustrate the technical solutions in the embodiments of the present application more clearly, the following briefly introduces the accompanying drawings that need to be used in the description of the embodiments or the prior art. Obviously, the drawings in the following description are only for the present application. In some embodiments, for those of ordinary skill in the art, other drawings can also be obtained according to these drawings without any creative effort.
图1是本申请一实施例提供一种成像方法的实现流程示意图;FIG. 1 is a schematic diagram of an implementation flowchart of an imaging method provided by an embodiment of the present application;
图2是本申请一实施例提供的成像方法所适用于的成像装置的结构示意图;FIG. 2 is a schematic structural diagram of an imaging device to which the imaging method provided by an embodiment of the present application is applicable;
图3是本申请一实施例提供的成像方法的所适用于成像装置的成像探头的结构示意图;3 is a schematic structural diagram of an imaging probe applicable to an imaging device of the imaging method provided by an embodiment of the present application;
图4是本申请一实施例提供的成像方法的三维位置模型的示例示意图;4 is an exemplary schematic diagram of a three-dimensional position model of an imaging method provided by an embodiment of the present application;
图5是本申请一实施例提供的成像方法中预设运动轨迹的示意图;5 is a schematic diagram of a preset motion trajectory in an imaging method provided by an embodiment of the present application;
图6是本申请另一实施例提供的一种成像方法的实现流程示意图;FIG. 6 is a schematic flowchart of an implementation of an imaging method provided by another embodiment of the present application;
图7是本申请另一实施例提供的成像方法中成像装置处于初始位姿的示意图;7 is a schematic diagram of an imaging device in an initial pose in an imaging method provided by another embodiment of the present application;
图8是本申请另一实施例提供的成像方法中太赫兹波信号被阻断的示例图;FIG. 8 is an example diagram of a terahertz wave signal being blocked in an imaging method provided by another embodiment of the present application;
图9是本申请另一实施例提供的一种成像方法的步骤S102的实现流程示意图;FIG. 9 is a schematic flowchart of the implementation of step S102 of an imaging method provided by another embodiment of the present application;
图10是本申请另一实施例提供的成像方法的步骤S102的应用场景示例图;FIG. 10 is an example diagram of an application scenario of step S102 of the imaging method provided by another embodiment of the present application;
图11是本申请实施例提供的成像装置的结构示意图;11 is a schematic structural diagram of an imaging device provided by an embodiment of the present application;
图12是本申请实施例提供的终端设备的结构示意图。FIG. 12 is a schematic structural diagram of a terminal device provided by an embodiment of the present application.
具体实施方式Detailed ways
以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本申请实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本申请。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本申请的描述。In the following description, for the purpose of illustration rather than limitation, specific details such as a specific system structure and technology are set forth in order to provide a thorough understanding of the embodiments of the present application. However, it will be apparent to those skilled in the art that the present application may be practiced in other embodiments without these specific details. In other instances, detailed descriptions of well-known systems, devices, circuits, and methods are omitted so as not to obscure the description of the present application with unnecessary detail.
应当理解,当在本申请说明书和所附权利要求书中使用时,术语“包括”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。It is to be understood that, when used in this specification and the appended claims, the term "comprising" indicates the presence of the described feature, integer, step, operation, element and/or component, but does not exclude one or more other The presence or addition of features, integers, steps, operations, elements, components and/or sets thereof.
还应当理解,在本申请说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。It will also be understood that, as used in this specification and the appended claims, the term "and/or" refers to and including any and all possible combinations of one or more of the associated listed items.
如在本申请说明书和所附权利要求书中所使用的那样,术语“如果”可以依据上下文被解释为“当...时”或“一旦”或“响应于确定”或“响应于检测到”。类似地,短语“如果确定”或“如果检测到[所描述条件或事件]”可以依据上下文被解释为意指“一旦确定”或“响应于确定”或“一旦检测到[所描述条件或事件]”或“响应于检测到[所描述条件或事件]”。As used in the specification of this application and the appended claims, the term "if" may be contextually interpreted as "when" or "once" or "in response to determining" or "in response to detecting ". Similarly, the phrases "if it is determined" or "if the [described condition or event] is detected" may be interpreted, depending on the context, to mean "once it is determined" or "in response to the determination" or "once the [described condition or event] is detected. ]" or "in response to detection of the [described condition or event]".
另外,在本申请说明书和所附权利要求书的描述中,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。In addition, in the description of the specification of the present application and the appended claims, the terms "first", "second", "third", etc. are only used to distinguish the description, and should not be construed as indicating or implying relative importance.
在本申请说明书中描述的参考“一个实施例”或“一些实施例”等意味着在本申请的一个或多个实施例中包括结合该实施例描述的特定特征、结构或特点。由此,在本说明书中的不同之处出现的语句“在一个实施例中”、“在一些实施例中”、“在其他一些实施例中”、“在另外一些实施例中”等不是必然都参考相同的实施例,而是意味着“一个或多个但不是所有的实施例”,除非是以其他方式另外特别强调。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。References in this specification to "one embodiment" or "some embodiments" and the like mean that a particular feature, structure or characteristic described in connection with the embodiment is included in one or more embodiments of the present application. Thus, appearances of the phrases "in one embodiment," "in some embodiments," "in other embodiments," "in other embodiments," etc. in various places in this specification are not necessarily All refer to the same embodiment, but mean "one or more but not all embodiments" unless specifically emphasized otherwise. The terms "including", "including", "having" and their variants mean "including but not limited to" unless specifically emphasized otherwise.
本申请实施例提供的成像方法可以应用于手机、平板电脑、可穿戴设备、车载设备、增强现实(augmented reality,AR)/虚拟现实(virtual reality,VR)设备、笔记本电脑、超级移动个人计算机(ultra-mobile personal computer,UMPC)、上网本、个人数字助理(personal digital assistant,PDA)等终端设备上,本申请实施例对终端设备的具体类型不作任何限制。The imaging method provided by the embodiments of the present application can be applied to mobile phones, tablet computers, wearable devices, in-vehicle devices, augmented reality (AR)/virtual reality (VR) devices, notebook computers, super mobile personal computers ( On terminal devices such as ultra-mobile personal computer, UMPC), netbook, personal digital assistant (personal digital assistant, PDA), the embodiments of the present application do not impose any restrictions on the specific type of the terminal device.
例如,所述终端设备可以是蜂窝电话、无绳电话、会话启动协议(SessionInitiationProtocol,SIP)电话、无线本地环路(Wireless Local Loop,WLL)站、个人数字处理(Personal Digital Assistant,PDA)设备、具有无线通信功能的手持设备、计算设备或连接到无线调制解调器的其它处理设备、车载设备、车联网终端、电脑、膝上型计算机、手持式通信设备、手持式计算设备、卫星无线设备、无线调制解调器卡、电视机顶盒(set topbox,STB)、用户驻地设备(customer premise equipment,CPE)和/或用于在无线系统上进行通信的其它设备以及下一代通信系统,例如,5G网络中的移动终端或者未来演进的公共陆地移动网络(Public Land Mobile Network,PLMN)网络中的移动终端等。For example, the terminal device may be a cellular phone, a cordless phone, a Session Initiation Protocol (SIP) phone, a Wireless Local Loop (WLL) station, a Personal Digital Assistant (PDA) device, a Wireless communication capable handheld devices, computing devices or other processing devices connected to wireless modems, in-vehicle devices, connected car terminals, computers, laptop computers, handheld communication devices, handheld computing devices, satellite wireless devices, wireless modem cards , TV set top box (STB), customer premise equipment (CPE) and/or other equipment for communicating over wireless systems and next generation communication systems, such as mobile terminals in 5G networks or future A mobile terminal in an evolved Public Land Mobile Network (Public Land Mobile Network, PLMN) network, etc.
请参阅图1,本申请一实施例提供了一种成像方法,应用于成像装置100,所述成像方法包括:Referring to FIG. 1, an embodiment of the present application provides an imaging method, which is applied to an
步骤S101:在第一成像位置获取被测物体的位置信息,并根据所述位置信息获取所述被测物体的三维位置模型;所述第一成像位置根据所述成像装置的预设运动轨迹进行设置。Step S101: Acquire position information of the measured object at a first imaging position, and obtain a three-dimensional position model of the measured object according to the position information; the first imaging position is performed according to the preset motion trajectory of the imaging device. set up.
具体地,请参见图2,图2示出了执行本实施例提供的成像方法的成像装置的结构示意图。如图2所示,在本实施例中,上述成像装置100包括:成像探头30、水平转台10、机械臂20以及支撑架(图中未标号)。成像探头30用于向所述被测物体40发射太赫兹波并接收从所述被测物体40反射回的所述太赫兹波,进一步地,成像探头30还用于对所述被测物体40进行摄像。进一步地,上述成像探头30还用于测量成像探头与被测物体表面的距离。上述水平转台10平铺设置且沿第一扫描轨迹绕所述被测物体40圆周转动。示例性的,第一扫描轨迹为圆形,被测物体40于第一扫描轨迹所确定的平面上的投影位于第一扫描轨迹的圆心处。机械臂20的一端连接所述水平转台10,机械臂20的另一端连接成像探头30,机械臂20驱动成像探头30沿第二扫描轨迹50移动绕所述被测物体40圆周转动。同样地,第二扫描轨迹50为圆形,被测物体40于第二扫描轨迹50所确定的平面上的投影位于第二扫描轨迹50的圆心处。可以理解的是,第二扫描轨迹50设置有多个,在水平转台10沿第一扫描轨迹的移动过程中,成像探头30分别且依次沿各第二扫描轨迹50移动,从而对被测物体40进行全方位的球形的立体成像。各第二扫描轨迹50的圆心重合,且各第二扫描轨迹50于空间上组合成一个扫描球51。各第二扫描轨迹50所确定的平面均垂直所述第一扫描轨迹所确定的平面。通过在第一扫描轨迹上间隔设置有多个第一成像工位,且各所述第一成像工位对应设置一所述第二扫描轨迹50;所述成像探头30于各所述第一成像工位处沿对应的所述第二扫描轨迹50绕所述被测物体40转动。可以理解的是,增加第一成像工位的数量,可以提高成像探头30的成像精度。通过水平转台10沿第一扫描轨迹移动,从而调节并设置成像探头30于水平面的位置。机械臂20驱动成像探头30依次沿各第二扫描轨迹50移动,从而对被测物体40进行全方位的扫描。上述第二扫描轨迹50上间隔设置有多个第一成像位置,所述成像探头30于第一成像位置处对所述被测物体40进行扫描成像。可以理解的是,增加第一成像位置的数量,可以提高成像探头30的成像精度。可以理解的是,上述预设运动轨迹即为上述第一扫描轨迹和上述第二扫描轨迹。Specifically, please refer to FIG. 2 , which shows a schematic structural diagram of an imaging apparatus for executing the imaging method provided in this embodiment. As shown in FIG. 2 , in this embodiment, the
具体地,通过在第一成像位置控制成像探头测量成像探头与被测物体表面的距离,进而确定被测物体的位置信息。Specifically, by controlling the imaging probe at the first imaging position to measure the distance between the imaging probe and the surface of the object to be measured, the position information of the object to be measured is further determined.
在本实施例中,如图3所示,上述成像探头30包括向所述被测物体40发射所述太赫兹波的发射探头31、接收经所述被测物体40所反射的所述太赫兹波的接收探头32、用于对所述被测体进行摄像的成像器33(可包括可见光成像器和太赫兹波成像器)以及连接所述成像器33的测距器34。所述测距器34用于探测所述成像器33对所述被测物体40的拍摄距离。可选地,发射探头31向被测物体40出射的太赫兹波的频率范围为0.1~10THz。成像探头30还包括由光纤、信号线、电源线等组成的线缆,从而实现成像探头30与外部电源和服务器的连接。可选地,上述测距器34为激光测距仪。In this embodiment, as shown in FIG. 3 , the
可选地,成像器33于成像区间35内拍摄,激光测距仪测量其至被测物体40之间的距离,发射探头31与接收探头32于被测物体40的表面有一聚焦点36,成像器33到聚焦点36的距离设定为D,D也为成像器33的焦距。在扫描过程中,通过激光测距仪进行实时测量,在实时监测的值偏离设定值时,机械臂20进行调整,以使成像器33到聚焦点36的距离D保持不变。Optionally, the
具体地,在第一成像位置通过测距器34来获取成像器33与被测物体表面的距离,由于位于第一成像位置的成像探头与预设运行轨迹的圆心的距离是固定的,因此根据成像器33与被测物体表面的距离就能够得到在该第一成像位置的被测物体的位置信息。Specifically, the distance between the
具体地,根据每个第一成像位置得到的位置信息就能构建被测物体的三维位置模型,如图4所示,其表示被测物体的三维位置模型,其中每个点代表着一个第一成像位置,第一成像位置的被测物体表面到预设运行轨迹圆心的距离W(即位置信息)为成像探头到的预设轨迹的圆心的距离H与成像探头到被测物体表面的距离T的差值,即W=H-T。根据每个第一成像位置的W值就能生成如图4所示的三维位置模型。Specifically, a three-dimensional position model of the measured object can be constructed according to the position information obtained from each first imaging position, as shown in FIG. 4 , which represents the three-dimensional position model of the measured object, wherein each point represents a first Imaging position, the distance W (ie position information) from the surface of the object to be measured at the first imaging position to the center of the preset running track is the distance H from the imaging probe to the center of the preset track and the distance T from the imaging probe to the surface of the object to be measured The difference of , namely W=H-T. The three-dimensional position model shown in FIG. 4 can be generated according to the W value of each first imaging position.
在一个实施例中,上述步骤S101包括以下步骤:In one embodiment, the above step S101 includes the following steps:
控制所述水平转台沿第一扫描轨迹运动至第一成像工位;controlling the horizontal turntable to move to the first imaging station along the first scanning track;
控制所述机械臂驱动所述成像探头沿第二扫描轨迹运动至各第一成像位置;controlling the robotic arm to drive the imaging probe to move to each first imaging position along the second scanning track;
控制所述成像探头在各第一成像位置获取所述被测物体表面至所述成像探头的距离;controlling the imaging probe to obtain the distance from the surface of the object to be measured to the imaging probe at each first imaging position;
根据所述被测物体表面至所述成像探头的距离绘制所述三维位置模型。The three-dimensional position model is drawn according to the distance from the surface of the object to be measured to the imaging probe.
具体地,请参见图5,预先设定机械臂20的各第二扫描轨迹50及水平转台10的第一扫描轨迹。机械臂20驱动成像探头30于各第一成像位置上完成一个第二扫描轨迹50的扫描,水平转台10前进一个第一成像工位,然后成像探头30再进行扫描,重复上述过程直至完成整个扫描,扫描过程中,成像探头30的运行轨迹的圆心保持不变,各第二扫描轨迹50组成球形的扫描球51。通过在各第一成像位置得到的所述被测物体表面至所述成像探头的距离就能构建出该被测物体的三维位置模型。Specifically, referring to FIG. 5 , each
步骤S102:根据所述被测物体的三维位置模型调整所述第一成像位置,得到第二成像位置。Step S102: Adjust the first imaging position according to the three-dimensional position model of the measured object to obtain a second imaging position.
具体地,在确定了被测物体的三维位置模型后,根据该三维位置模型对第一成像位置进行调整,并控制成像探头调整到该第二成像位置处。Specifically, after the three-dimensional position model of the measured object is determined, the first imaging position is adjusted according to the three-dimensional position model, and the imaging probe is controlled to be adjusted to the second imaging position.
具体地,当获取了全部第一成像位置的位置信息后,控制成像装置回到初始姿态,然后利用太赫兹波对被测物体进行再一次扫描。而此时的成像位置为各第二成像位置。对每个第一成像位置进行调整,使得成像探头垂直于被测物体表面且与被测物体表面的距离等于H。通过调整第一成像位置,在第二成像位置再次对被测物体进行扫描,就能够得到被测物体的表面特征信息。Specifically, after acquiring the position information of all the first imaging positions, the imaging device is controlled to return to the initial posture, and then the measured object is scanned again by using the terahertz wave. The imaging positions at this time are the second imaging positions. Each first imaging position is adjusted so that the imaging probe is perpendicular to the surface of the object to be measured and the distance from the surface of the object to be measured is equal to H. By adjusting the first imaging position and scanning the object under test again at the second imaging position, the surface feature information of the object under test can be obtained.
步骤S103:在第二成像位置获取所述被测物体反射的太赫兹波信号,并基于所述太赫兹波信号进行三维图像重建,得到所述被测物体的三维图像。Step S103: Acquire a terahertz wave signal reflected by the measured object at the second imaging position, and perform three-dimensional image reconstruction based on the terahertz wave signal to obtain a three-dimensional image of the measured object.
可以理解的是,从被测物体40所接收的太赫兹波包含有被测物体40相关的特征信息,成像探头会将反馈的太赫兹波信号传输至与其通信连接的服务器并经服务器处理,从而对被测物体40进行立体成像。It can be understood that the terahertz wave received from the measured
具体地,通过太赫兹计算机辅助层析成像、太赫兹数字全息、太赫兹衍射层析成像以及太赫兹断层成像等方法利用在第二成像位置反馈的太赫兹波信号来实现三维图像重建,以得到该被测物体对应的三维图像。Specifically, three-dimensional image reconstruction is realized by using the terahertz wave signal fed back at the second imaging position by methods such as terahertz computer-aided tomography, terahertz digital holography, terahertz diffraction tomography, and terahertz tomography, so as to obtain The three-dimensional image corresponding to the measured object.
在一个实施例中,当两次扫描完成后,则再次控制成像装置回到初始姿态,并结束本次成像流程。In one embodiment, after the two scans are completed, the imaging device is controlled again to return to the initial posture, and the current imaging process is ended.
如图6所示,在另一个实施例中,上述成像方法在步骤S101之前还包括:As shown in FIG. 6, in another embodiment, before step S101, the imaging method further includes:
步骤S104:调整所述成像装置处于初始姿态。Step S104: Adjust the imaging device to be in an initial posture.
具体地,先控制成像装置回到初始姿态,再控制成像装置在各个第一成像位置来获取被测物体的位置信息,能够使得成像装置的成像探头与支撑架的标识圆点的垂直距离为预设值。在本实施例中,上述预设值等于成像器到聚焦点的距离D。Specifically, first control the imaging device to return to the initial posture, and then control the imaging device to obtain the position information of the measured object at each first imaging position, so that the vertical distance between the imaging probe of the imaging device and the marking dot of the support frame is predetermined set value. In this embodiment, the above-mentioned preset value is equal to the distance D from the imager to the focus point.
在一个实施例中,上述步骤S104包括以下步骤:In one embodiment, the above step S104 includes the following steps:
控制所述水平转台移动至第一初始位置;controlling the horizontal turntable to move to a first initial position;
控制所述机械臂运动并调整所述成像探头,使所述成像探头到支撑架的标识圆点的垂直距离为预定值。The movement of the robotic arm is controlled and the imaging probe is adjusted so that the vertical distance from the imaging probe to the marked dot of the support frame is a predetermined value.
具体地,上述成像探头的成像器包括摄像头,先控制水平转台运动到第一初始位置后,利用成像探头的摄像头获取图像,通过控制程序将机械臂移动至支撑架上的标示圆点,由于标示圆点位于支撑架上,利用摄像头和激光测距仪,机械臂通过校准程序,调节成像探头30,使成像探头30到标示圆点的垂直距离为预定值,该预定值等于D。由于标示圆点为标准的圆形,其外形和尺寸固定,所以通过摄像头采集的标示圆点的实时图像与标准的标示圆点的位置对比并调节机械臂20,精准的进行扫描初始化。上述第一初始位置是第一扫描轨迹上的一个位置点,可以根据需求进行设定,在此不加以限制。Specifically, the imager of the imaging probe includes a camera. After first controlling the horizontal turntable to move to the first initial position, the camera of the imaging probe is used to obtain an image, and the robotic arm is moved to the marked dot on the support frame through the control program. The dot is located on the support frame. Using the camera and the laser rangefinder, the robotic arm adjusts the
请参阅图7,实线圆72为摄像头采集到的标示圆点的实时图像,虚线圆71为绘制的标准的标示圆点,位于显示屏幕的中心位置,通过调整机械臂20的移动,使实线圆与虚线圆重合,即成像装置处于初始位姿。Please refer to FIG. 7 , the solid line circle 72 is the real-time image of the marked dot collected by the camera, and the dotted line circle 71 is the drawn standard marked dot, which is located in the center of the display screen. By adjusting the movement of the
在一个实施例中,上述成像方法在步骤S101之后,还包括:In one embodiment, after step S101, the imaging method further includes:
在第一成像位置获取所述被测物体的可见光图像。A visible light image of the measured object is acquired at the first imaging position.
具体地,通过成像探头的摄像头获取被测物体的可见光图像。Specifically, the visible light image of the object to be measured is acquired through the camera of the imaging probe.
在一个实施例中,上述摄像头为CCD摄像头,CCD摄像头对被测物体40进行拍摄并将拍摄的光学图片输送至服务器进行处理。结合可见光图像对根据太赫兹波信号重建得到的三维图像进行修正,进而得到更精准的被测物体的三维图像。In one embodiment, the above-mentioned camera is a CCD camera, and the CCD camera takes pictures of the object to be measured 40 and transmits the taken optical pictures to the server for processing. The three-dimensional image reconstructed from the terahertz wave signal is corrected in combination with the visible light image, so as to obtain a more accurate three-dimensional image of the measured object.
具体地,在第一成像位置获取被测物体的位置信息的同时获取被测物体的可见光图像,通过将每个第一成像位置获取到的可见光图像进行拼接,就能得到该被测物体完整的可见光图像。Specifically, a visible light image of the measured object is obtained at the same time as the position information of the measured object is obtained at the first imaging position, and a complete picture of the measured object can be obtained by splicing the visible light images obtained at each first imaging position. Visible light image.
在一个实施例中,上述步骤S103之前,还包括以下步骤:In one embodiment, before the above step S103, the following steps are further included:
判断所述太赫兹波信号是否被阻断;determining whether the terahertz wave signal is blocked;
若所述太赫兹波信号被阻断,则标识所述太赫兹波信号被阻断的第二成像位置;If the terahertz wave signal is blocked, identifying a second imaging position where the terahertz wave signal is blocked;
根据被标识的第二成像位置获取对应的可见光图像;Acquiring a corresponding visible light image according to the identified second imaging position;
根据所述可见光图像对所述被测物体的三维图像进行修正。The three-dimensional image of the measured object is corrected according to the visible light image.
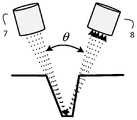
在具体的应用中,所述发射探头与所述接收探头相对所述成像器镜像设置,且所述发射探头的轴向与所述接收探头的轴向之间的夹角呈预设值设置。可选地,夹角记为θ。如图8所示,太赫兹波发射探头7与太赫兹波接收探头8之间的角度为θ,当样品表面出现较深的凹槽或其他结构时,会影响太赫兹光路的正常传输时,此时由于太赫兹波信息的传输路径被阻断,因此太赫兹波接收探头会接收不到太赫兹波,因此要对成像探头的成像位置进行调整,使得太赫兹波接收探头能够接收到太赫兹波信号,但是由于阻挡,这个成像位置的太赫兹波信号并不能完全的体现被测物体的表面特征,因此对该第二成像位置进行标记,并基于该第二成像位置对应的第一成像位置找到该位置的可见光图像,结合可见光图像对重建完成的三维图像进行修正,进而得到更加精准的被测物体的三维图像。In a specific application, the transmitting probe and the receiving probe are mirrored relative to the imager, and the included angle between the axial direction of the transmitting probe and the axial direction of the receiving probe is set to a preset value. Optionally, the included angle is denoted as θ. As shown in Figure 8, the angle between the terahertz
请参阅图9,图9示出了本申请另一实施例提供的一种成像方法的S102的具体实现流程图。本实施例与上一实施例的不同之处在于,本实施例提供的一种成像方法中S102包含以下多个步骤,详述如下:Referring to FIG. 9 , FIG. 9 shows a specific implementation flowchart of S102 of an imaging method provided by another embodiment of the present application. The difference between this embodiment and the previous embodiment is that in an imaging method provided by this embodiment, S102 includes the following steps, which are described in detail as follows:
步骤S201:根据所述被测物体表面至所述成像探头的距离及所述成像探头的焦距调整所述成像探头与所述支撑台的距离。Step S201: Adjust the distance between the imaging probe and the support base according to the distance from the surface of the object to be measured to the imaging probe and the focal length of the imaging probe.
步骤S202:根据所述三维位置模型确定被测物体的表面倾斜度,并调整所述成像探头至垂直于被测物体表面的第二成像位置。Step S202: Determine the surface inclination of the object to be measured according to the three-dimensional position model, and adjust the imaging probe to a second imaging position perpendicular to the surface of the object to be measured.
具体地,如图10所示,其中,19、20、21为球形扫描时被测物体表面连续的三个测量点。3为机械臂上的成像探头,虚线为步骤S101扫描时成像探头的运动轨迹,指向球心18,同时到球心的距离H固定,实线为调整后的被测物体表面的20处的位置。Specifically, as shown in FIG. 10 , 19 , 20 and 21 are three continuous measurement points on the surface of the object to be measured during spherical scanning. 3 is the imaging probe on the robotic arm, the dotted line is the motion track of the imaging probe during scanning in step S101, pointing to the center of the
以测量被测物体表面的20这个测量点的太赫兹波信号为例,首先根据前一个测量点19和后一个测量点21,在步骤S101扫描时构成的三维位置模型中找到垂直于两者连线的方向,调整机械臂的角度,使机械臂的位置垂直于三维位置模型中19和21之间的连线,角度调整完成后再进行焦距调整。Taking the terahertz wave signal of the
由于太赫兹探头的焦距为D,在步骤S101扫描时测得的探头到样品表面的距离为T,所以,机械臂的调整距离ΔD为:Since the focal length of the terahertz probe is D, the distance from the probe to the sample surface measured in step S101 is T, so the adjustment distance ΔD of the robotic arm is:
ΔD=T-DΔD=T-D
如果ΔD为正数,则机械臂朝着靠近20的位置移动|ΔD|距离,如果ΔD为负数,则机械臂朝着远离20的位置移动|ΔD|距离,最终调节完成后的位置如图10中实线3所示。If ΔD is a positive number, the robotic arm moves a distance of |ΔD| toward a position close to 20. If ΔD is a negative number, the robotic arm moves a distance of |ΔD| away from 20. The final adjusted position is shown in Figure 10 Shown in
本申请实施例提供的成像方法,通过先获取被测物体的位置信息后调整成像装置的位置,再获取对应的太赫兹波信号来生成该被测物体的三维图像,且第一成像位置和第二成像位置是根据成像装置的预设运动轨迹来设置的,因此能够全方位地获取到被测物体的位置信息和太赫兹波信号,进而实现对被测物体进行全方位的三维成像。The imaging method provided by the embodiment of the present application generates a three-dimensional image of the measured object by first obtaining the position information of the measured object, then adjusting the position of the imaging device, and then obtaining the corresponding terahertz wave signal, and the first imaging position and the third The second imaging position is set according to the preset motion trajectory of the imaging device, so the position information and terahertz wave signal of the measured object can be obtained in all directions, thereby realizing omnidirectional three-dimensional imaging of the measured object.
对应于上文实施例所述的成像方法,图11示出了本申请实施例提供的成像装置的结构框图,为了便于说明,仅示出了与本申请实施例相关的部分。Corresponding to the imaging methods described in the above embodiments, FIG. 11 shows a structural block diagram of the imaging apparatus provided by the embodiments of the present application. For convenience of description, only the parts related to the embodiments of the present application are shown.
参照图11,该成像装置包括位置获取模块101、调整模块102以及成像模块103。Referring to FIG. 11 , the imaging device includes a
位置获取模块101用于在第一成像位置获取被测物体的位置信息,并根据所述位置信息获取所述被测物体的三维位置模型;所述第一成像位置根据所述成像装置的预设运动轨迹进行设置。The
调整模块102用于根据所述被测物体的三维位置模型调整所述第一成像位置,得到第二成像位置。The
重建模块103用于在第二成像位置获取所述被测物体反射的太赫兹波信号,并基于所述太赫兹波信号进行三维图像重建,得到所述被测物体的三维图像。The
在一个实施例中,上述成像装置还包括初始化模块。In one embodiment, the above imaging device further includes an initialization module.
上述初始化模块用于调整所述成像装置处于初始姿态。The above initialization module is used to adjust the imaging device to be in an initial posture.
在一个实施例中,上述初始化模块包括第一初始化单元和第二初始化单元。In one embodiment, the above-mentioned initialization module includes a first initialization unit and a second initialization unit.
上述第一初始化单元用于控制所述水平转台移动至第一初始位置。The above-mentioned first initializing unit is used for controlling the horizontal turntable to move to a first initial position.
上述第二初始化单元用于控制所述机械臂运动并调整所述成像探头,使所述成像探头到支撑架的标识圆点的垂直距离为预定值。The above-mentioned second initialization unit is used to control the movement of the robotic arm and adjust the imaging probe, so that the vertical distance between the imaging probe and the marking dot of the support frame is a predetermined value.
在一个实施例中,上述位置获取模块101包括第一控制单元、第二控制单元、第三控制单元以及绘制单元。In one embodiment, the above-mentioned
上述第一控制单元用于控制所述水平转台沿第一扫描轨迹运动至第一成像工位。The above-mentioned first control unit is used for controlling the horizontal turntable to move to the first imaging station along the first scanning track.
上述第二控制单元用于控制所述机械臂驱动所述成像探头沿第二扫描轨迹运动至各第一成像位置。The above-mentioned second control unit is used for controlling the robotic arm to drive the imaging probe to move to each first imaging position along the second scanning track.
上述第三控制单元用于控制所述成像探头在各第一成像位置获取所述被测物体表面至所述成像探头的距离。The above-mentioned third control unit is configured to control the imaging probe to obtain the distance from the surface of the object to be measured to the imaging probe at each first imaging position.
上述绘制单元用于根据所述被测物体表面至所述成像探头的距离绘制所述三维位置模型。The above-mentioned drawing unit is configured to draw the three-dimensional position model according to the distance from the surface of the object to be measured to the imaging probe.
在一个实施例中,上述调整模块102包括焦距调整单元以及角度调整单元。In one embodiment, the above-mentioned
上述焦距调整单元用于根据所述被测物体表面至所述成像探头的距离及所述成像探头的焦距调整所述成像探头与所述支撑台的距离。The above-mentioned focal length adjusting unit is configured to adjust the distance between the imaging probe and the support base according to the distance from the surface of the object to be measured to the imaging probe and the focal length of the imaging probe.
上述角度调整单元用于根据所述三维位置模型确定被测物体的表面倾斜度,并调整所述成像探头至垂直于被测物体表面的第二成像位置。The angle adjustment unit is configured to determine the surface inclination of the object to be measured according to the three-dimensional position model, and adjust the imaging probe to a second imaging position perpendicular to the surface of the object to be measured.
在一个实施例中,上述成像装置还包括可见光图像获取模块。In one embodiment, the above imaging device further includes a visible light image acquisition module.
上述可见光图像获取模块用于在第一成像位置获取所述被测物体的可见光图像。The above visible light image acquisition module is configured to acquire the visible light image of the measured object at the first imaging position.
在一个实施例中,上述成像装置还包括判断模块、标识模块、对应获取模块以及修正模块。In one embodiment, the above imaging device further includes a judgment module, an identification module, a corresponding acquisition module, and a correction module.
上述判断模块用于判断所述太赫兹波信号是否被阻断。The above judgment module is used to judge whether the terahertz wave signal is blocked.
上述标识模块用于若所述太赫兹波信号被阻断,则标识所述太赫兹波信号被阻断的第二成像位置。The above identification module is configured to identify the second imaging position where the terahertz wave signal is blocked if the terahertz wave signal is blocked.
上述对应获取模块用于根据被标识的第二成像位置获取对应的可见光图像。The above-mentioned corresponding acquisition module is configured to acquire a corresponding visible light image according to the identified second imaging position.
上述修正模块用于根据所述可见光图像对所述被测物体的三维图像进行修正。The above-mentioned correction module is used for correcting the three-dimensional image of the measured object according to the visible light image.
需要说明的是,上述装置/单元之间的信息交互、执行过程等内容,由于与本申请方法实施例基于同一构思,其具体功能及带来的技术效果,具体可参见方法实施例部分,此处不再赘述。It should be noted that the information exchange, execution process and other contents between the above-mentioned devices/units are based on the same concept as the method embodiments of the present application. For specific functions and technical effects, please refer to the method embodiments section. It is not repeated here.
所属领域的技术人员可以清楚地了解到,为了描述的方便和简洁,仅以上述各功能单元、模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能单元、模块完成,即将所述装置的内部结构划分成不同的功能单元或模块,以完成以上描述的全部或者部分功能。实施例中的各功能单元、模块可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中,上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。另外,各功能单元、模块的具体名称也只是为了便于相互区分,并不用于限制本申请的保护范围。上述系统中单元、模块的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。Those skilled in the art can clearly understand that, for the convenience and simplicity of description, only the division of the above-mentioned functional units and modules is used as an example for illustration. In practical applications, the above-mentioned functions can be allocated to different functional units, Module completion, that is, dividing the internal structure of the device into different functional units or modules to complete all or part of the functions described above. Each functional unit and module in the embodiment may be integrated in one processing unit, or each unit may exist physically alone, or two or more units may be integrated in one unit, and the above-mentioned integrated units may adopt hardware. It can also be realized in the form of software functional units. In addition, the specific names of the functional units and modules are only for the convenience of distinguishing from each other, and are not used to limit the protection scope of the present application. For the specific working processes of the units and modules in the above-mentioned system, reference may be made to the corresponding processes in the foregoing method embodiments, which will not be repeated here.
因此,本实施例提供的成像装置同样能够通过先获取被测物体的位置信息后调整成像装置的位置,再获取对应的太赫兹波信号来生成该被测物体的三维图像,且第一成像位置和第二成像位置是根据成像装置的预设运动轨迹来设置的,因此能够全方位地获取到被测物体的位置信息和太赫兹波信号,进而实现对被测物体进行全方位的三维成像。Therefore, the imaging device provided in this embodiment can also generate a three-dimensional image of the measured object by first acquiring the position information of the measured object, then adjusting the position of the imaging device, and then acquiring the corresponding terahertz wave signal, and the first imaging position The imaging position and the second imaging position are set according to the preset motion trajectory of the imaging device, so the position information and terahertz wave signal of the measured object can be obtained in all directions, thereby realizing omnidirectional three-dimensional imaging of the measured object.
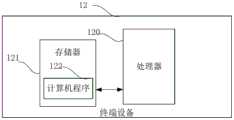
图12为本申请一实施例提供的终端设备的结构示意图。如图12所示,该实施例的终端设备12包括:至少一个处理器120(图12中仅示出一个)处理器、存储器121以及存储在所述存储器121中并可在所述至少一个处理器120上运行的计算机程序122,所述处理器120执行所述计算机程序122时实现上述任意各个成像方法实施例中的步骤。FIG. 12 is a schematic structural diagram of a terminal device provided by an embodiment of the present application. As shown in FIG. 12 , the
所述终端设备12可以是桌上型计算机、笔记本、掌上电脑及云端服务器等计算设备。该终端设备可包括,但不仅限于,处理器120、存储器121。本领域技术人员可以理解,图12仅仅是终端设备12的举例,并不构成对终端设备12的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件,例如还可以包括输入输出设备、网络接入设备等。The
所称处理器120可以是中央处理单元(Central Processing Unit,CPU),该处理器120还可以是其他通用处理器、数字信号处理器(Digital Signal Processor,DSP)、专用集成电路(Application Specific Integrated Circuit,ASIC)、现成可编程门阵列(Field-Programmable Gate Array,FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。The so-called
所述存储器121在一些实施例中可以是所述终端设备12的内部存储单元,例如终端设备12的硬盘或内存。所述存储器121在另一些实施例中也可以是所述终端设备12的外部存储设备,例如所述终端设备12上配备的插接式硬盘,智能存储卡(Smart Media Card,SMC),安全数字(Secure Digital,SD)卡,闪存卡(Flash Card)等。进一步地,所述存储器121还可以既包括所述终端设备12的内部存储单元也包括外部存储设备。所述存储器121用于存储操作系统、应用程序、引导装载程序(BootLoader)、数据以及其他程序等,例如所述计算机程序的程序代码等。所述存储器121还可以用于暂时地存储已经输出或者将要输出的数据。The
示例性的,所述计算机程序122可以被分割成一个或多个单元,所述一个或者多个单元被存储在所述存储器121中,并由所述处理器120执行,以完成本申请。所述一个或多个单元可以是能够完成特定功能的一系列计算机程序指令段,该指令段用于描述所述计算机程序122在所述终端设备12中的执行过程。例如,所述计算机程序122可以被分割成位置获取块、调整模块以及重建模块,各单元具体功能如下:Exemplarily, the
位置获取模块,用于在第一成像位置获取被测物体的位置信息,并根据所述位置信息获取所述被测物体的三维位置模型;所述第一成像位置根据所述成像装置的预设运动轨迹进行设置;a position acquisition module, configured to acquire position information of the object to be measured at a first imaging position, and obtain a three-dimensional position model of the object to be measured according to the position information; the first imaging position is preset according to the imaging device Set the motion track;
调整模块,用于根据所述被测物体的三维位置模型调整所述第一成像位置,得到第二成像位置;an adjustment module, configured to adjust the first imaging position according to the three-dimensional position model of the measured object to obtain a second imaging position;
重建模块,用于在第二成像位置获取所述被测物体反射的太赫兹波信号,并基于所述太赫兹波信号进行三维图像重建,得到所述被测物体的三维图像。A reconstruction module, configured to acquire a terahertz wave signal reflected by the measured object at the second imaging position, and perform three-dimensional image reconstruction based on the terahertz wave signal to obtain a three-dimensional image of the measured object.
本申请实施例还提供了一种网络设备,该网络设备包括:至少一个处理器、存储器以及存储在所述存储器中并可在所述至少一个处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任意各个方法实施例中的步骤。An embodiment of the present application also provides a network device, the network device includes: at least one processor, a memory, and a computer program stored in the memory and executable on the at least one processor, the processor executing The computer program implements the steps in any of the foregoing method embodiments.
本申请实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现可实现上述各个方法实施例中的步骤。Embodiments of the present application further provide a computer-readable storage medium, where a computer program is stored in the computer-readable storage medium, and when the computer program is executed by a processor, the steps in the foregoing method embodiments can be implemented.
本申请实施例提供了一种计算机程序产品,当计算机程序产品在移动终端上运行时,使得移动终端执行时实现可实现上述各个方法实施例中的步骤。The embodiments of the present application provide a computer program product, when the computer program product runs on a mobile terminal, the steps in the foregoing method embodiments can be implemented when the mobile terminal executes the computer program product.
所述集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本申请实现上述实施例方法中的全部或部分流程,可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一计算机可读存储介质中,该计算机程序在被处理器执行时,可实现上述各个方法实施例的步骤。其中,所述计算机程序包括计算机程序代码,所述计算机程序代码可以为源代码形式、对象代码形式、可执行文件或某些中间形式等。所述计算机可读介质至少可以包括:能够将计算机程序代码携带到拍照装置/终端设备的任何实体或装置、记录介质、计算机存储器、只读存储器(ROM,Read-Only Memory)、随机存取存储器(RAM,RandomAccess Memory)、电载波信号、电信信号以及软件分发介质。例如U盘、移动硬盘、磁碟或者光盘等。在某些司法管辖区,根据立法和专利实践,计算机可读介质不可以是电载波信号和电信信号。The integrated unit, if implemented in the form of a software functional unit and sold or used as an independent product, may be stored in a computer-readable storage medium. Based on this understanding, all or part of the processes in the methods of the above embodiments can be implemented by a computer program to instruct the relevant hardware. The computer program can be stored in a computer-readable storage medium. The computer program When executed by the processor, the steps of the above-mentioned various method embodiments may be implemented. Wherein, the computer program includes computer program code, and the computer program code may be in the form of source code, object code, executable file or some intermediate form, and the like. The computer-readable medium may include at least: any entity or device capable of carrying the computer program code to the photographing device/terminal device, recording medium, computer memory, read-only memory (ROM, Read-Only Memory), random access memory (RAM, RandomAccess Memory), electrical carrier signal, telecommunication signal, and software distribution medium. For example, U disk, mobile hard disk, disk or CD, etc. In some jurisdictions, under legislation and patent practice, computer-readable media may not be electrical carrier signals and telecommunications signals.
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述或记载的部分,可以参见其它实施例的相关描述。In the foregoing embodiments, the description of each embodiment has its own emphasis. For parts that are not described or described in detail in a certain embodiment, reference may be made to the relevant descriptions of other embodiments.
本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本申请的范围。Those of ordinary skill in the art can realize that the units and algorithm steps of each example described in conjunction with the embodiments disclosed herein can be implemented in electronic hardware, or a combination of computer software and electronic hardware. Whether these functions are performed in hardware or software depends on the specific application and design constraints of the technical solution. Skilled artisans may implement the described functionality using different methods for each particular application, but such implementations should not be considered beyond the scope of this application.
在本申请所提供的实施例中,应该理解到,所揭露的装置/网络设备和方法,可以通过其它的方式实现。例如,以上所描述的装置/网络设备实施例仅仅是示意性的,例如,所述模块或单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通讯连接可以是通过一些接口,装置或单元的间接耦合或通讯连接,可以是电性,机械或其它的形式。In the embodiments provided in this application, it should be understood that the disclosed apparatus/network device and method may be implemented in other manners. For example, the apparatus/network device embodiments described above are only illustrative. For example, the division of the modules or units is only a logical function division. In actual implementation, there may be other division methods, such as multiple units. Or components may be combined or may be integrated into another system, or some features may be omitted, or not implemented. On the other hand, the shown or discussed mutual coupling or direct coupling or communication connection may be through some interfaces, indirect coupling or communication connection of devices or units, and may be in electrical, mechanical or other forms.
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。The units described as separate components may or may not be physically separated, and components displayed as units may or may not be physical units, that is, may be located in one place, or may be distributed to multiple network units. Some or all of the units may be selected according to actual needs to achieve the purpose of the solution in this embodiment.
以上所述实施例仅用以说明本申请的技术方案,而非对其限制;尽管参照前述实施例对本申请进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本申请各实施例技术方案的精神和范围,均应包含在本申请的保护范围之内。The above-mentioned embodiments are only used to illustrate the technical solutions of the present application, but not to limit them; although the present application has been described in detail with reference to the above-mentioned embodiments, those of ordinary skill in the art should understand that: it can still be used for the above-mentioned implementations. The technical solutions recorded in the examples are modified, or some technical features thereof are equivalently replaced; and these modifications or replacements do not make the essence of the corresponding technical solutions deviate from the spirit and scope of the technical solutions in the embodiments of the application, and should be included in the within the scope of protection of this application.
Claims (10)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910954538.9ACN110672549B (en) | 2019-10-09 | 2019-10-09 | Imaging method and device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910954538.9ACN110672549B (en) | 2019-10-09 | 2019-10-09 | Imaging method and device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110672549Atrue CN110672549A (en) | 2020-01-10 |
| CN110672549B CN110672549B (en) | 2022-08-09 |
Family
ID=69081157
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910954538.9AActiveCN110672549B (en) | 2019-10-09 | 2019-10-09 | Imaging method and device |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110672549B (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114062302A (en)* | 2021-09-27 | 2022-02-18 | 国网河北省电力有限公司雄安新区供电公司 | Autonomous inspection method of distribution network for terahertz imaging detection |
| CN114252395A (en)* | 2021-12-15 | 2022-03-29 | 中国科学院深圳先进技术研究院 | Terahertz measurement device and system |
| WO2022127995A1 (en)* | 2020-12-16 | 2022-06-23 | CiTEX Holding GmbH | Thz measuring device and thz measuring method for performing a measurement on a corrugated pipe |
| CN114777676A (en)* | 2022-05-11 | 2022-07-22 | 青岛盛瀚色谱技术有限公司 | Self-adaptive terahertz three-dimensional tomography device and method |
| CN115079167A (en)* | 2022-05-23 | 2022-09-20 | 电子科技大学 | Terahertz continuous wave three-dimensional tomography device and method |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130146770A1 (en)* | 2011-12-08 | 2013-06-13 | Electronics And Telecommunications Research Institute | Terahertz continuous wave system and method of obtaining three-dimensional image thereof |
| CN105158196A (en)* | 2015-05-12 | 2015-12-16 | 上海理工大学 | Terahertz wave 3D image acquisition method and system |
| CN107510466A (en)* | 2016-06-15 | 2017-12-26 | 中慧医学成像有限公司 | Three-dimensional imaging method and system |
| CN107631995A (en)* | 2016-07-18 | 2018-01-26 | 华中科技大学 | A kind of three-dimensional terahertz tomographic imaging system and scanning and image rebuilding method |
| CN107689072A (en)* | 2016-06-12 | 2018-02-13 | 中慧医学成像有限公司 | Three-dimensional image imaging method and system |
| CN109142267A (en)* | 2018-09-07 | 2019-01-04 | 北京华航无线电测量研究所 | A kind of real-time terahertz imaging device and method |
| CN109276229A (en)* | 2018-08-15 | 2019-01-29 | 华中科技大学苏州脑空间信息研究院 | A kind of rapid focus system and method for opto-acoustic microscopic imaging |
| CN109300823A (en)* | 2018-11-28 | 2019-02-01 | 德淮半导体有限公司 | Ultrasonic scanning system and for wafer carry out ultrasonic scanning method |
- 2019
- 2019-10-09CNCN201910954538.9Apatent/CN110672549B/enactiveActive
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130146770A1 (en)* | 2011-12-08 | 2013-06-13 | Electronics And Telecommunications Research Institute | Terahertz continuous wave system and method of obtaining three-dimensional image thereof |
| CN105158196A (en)* | 2015-05-12 | 2015-12-16 | 上海理工大学 | Terahertz wave 3D image acquisition method and system |
| CN107689072A (en)* | 2016-06-12 | 2018-02-13 | 中慧医学成像有限公司 | Three-dimensional image imaging method and system |
| CN107510466A (en)* | 2016-06-15 | 2017-12-26 | 中慧医学成像有限公司 | Three-dimensional imaging method and system |
| CN107631995A (en)* | 2016-07-18 | 2018-01-26 | 华中科技大学 | A kind of three-dimensional terahertz tomographic imaging system and scanning and image rebuilding method |
| CN109276229A (en)* | 2018-08-15 | 2019-01-29 | 华中科技大学苏州脑空间信息研究院 | A kind of rapid focus system and method for opto-acoustic microscopic imaging |
| CN109142267A (en)* | 2018-09-07 | 2019-01-04 | 北京华航无线电测量研究所 | A kind of real-time terahertz imaging device and method |
| CN109300823A (en)* | 2018-11-28 | 2019-02-01 | 德淮半导体有限公司 | Ultrasonic scanning system and for wafer carry out ultrasonic scanning method |
Non-Patent Citations (4)
| Title |
|---|
| GAO JINGKUN等: "Fast Three-Dimensional Image Reconstruction of a Standoff Screening System in the Terahertz Regime", 《IEEE》* |
| GAO JINGKUN等: "Fast Three-Dimensional Image Reconstruction of a Standoff Screening System in the Terahertz Regime", 《IEEE》, vol. 8, no. 1, 31 January 2018 (2018-01-31), pages 38 - 51* |
| 李运达 等: "太赫兹计算机辅助层析成像发展近况", 《激光与红外》* |
| 李运达 等: "太赫兹计算机辅助层析成像发展近况", 《激光与红外》, vol. 42, no. 1, 31 December 2012 (2012-12-31), pages 1372 - 1375* |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022127995A1 (en)* | 2020-12-16 | 2022-06-23 | CiTEX Holding GmbH | Thz measuring device and thz measuring method for performing a measurement on a corrugated pipe |
| CN114062302A (en)* | 2021-09-27 | 2022-02-18 | 国网河北省电力有限公司雄安新区供电公司 | Autonomous inspection method of distribution network for terahertz imaging detection |
| CN114252395A (en)* | 2021-12-15 | 2022-03-29 | 中国科学院深圳先进技术研究院 | Terahertz measurement device and system |
| CN114252395B (en)* | 2021-12-15 | 2024-12-31 | 中国科学院深圳先进技术研究院 | Terahertz measurement devices and systems |
| CN114777676A (en)* | 2022-05-11 | 2022-07-22 | 青岛盛瀚色谱技术有限公司 | Self-adaptive terahertz three-dimensional tomography device and method |
| CN115079167A (en)* | 2022-05-23 | 2022-09-20 | 电子科技大学 | Terahertz continuous wave three-dimensional tomography device and method |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110672549B (en) | 2022-08-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110672549B (en) | Imaging method and device | |
| US7733404B2 (en) | Fast imaging system calibration | |
| CN111161347B (en) | Method and equipment for initializing SLAM | |
| CN112348863B (en) | Image alignment method, image alignment device and terminal equipment | |
| US20160119770A1 (en) | Method for scanning neighboring devices and electronic device thereof | |
| KR101900873B1 (en) | Method, device and system for acquiring antenna engineering parameters | |
| CN108257183A (en) | A kind of camera lens axis calibrating method and device | |
| CN113272871B (en) | Camera calibration method and system | |
| CN112218070B (en) | Stray light detection method and device, storage medium and electronic equipment | |
| JP7683133B2 (en) | Scan data processing method, device, equipment and medium | |
| CN114187366B (en) | Camera installation and correction method, device, electronic equipment and storage medium | |
| KR20220044572A (en) | Method, apparatus, processor and electronics for obtaining calibration parameters | |
| CN112630750A (en) | Sensor calibration method and sensor calibration device | |
| US20190012809A1 (en) | Stereo vision measuring system and stereo vision measuring method | |
| CN110726971A (en) | Visible light positioning method, device, terminal and storage medium | |
| WO2022000176A1 (en) | Infrared image processing method, electronic device, and computer-readable storage medium | |
| US20210327083A1 (en) | Systems and methods of measuring an object in a scene of a captured image | |
| CN114078165A (en) | Calibration method of optical imaging module, distortion correction method and related equipment | |
| WO2018170725A1 (en) | Image transmission method, device, and apparatus | |
| CN211292584U (en) | an imaging device | |
| US20220086350A1 (en) | Image Generation Method and Apparatus, Terminal and Corresponding Storage Medium | |
| JP2025500066A (en) | Scanning device and connection method thereof, connection device, electronic device, and storage medium | |
| WO2022183906A1 (en) | Imaging method and apparatus, device, and storage medium | |
| CN115834860A (en) | Background blurring method, device, device, storage medium and program product | |
| CN115334247A (en) | Camera module calibration method, visual positioning method and device and electronic equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| TA01 | Transfer of patent application right | ||
| TA01 | Transfer of patent application right | Effective date of registration:20200915 Address after:518000 Guangdong Province, Baoan District Xixiang street Shenzhen City Tian Yi Lu Chen Tian Bao Industrial District thirty-seventh building 430 room Applicant after:Shenzhen Zhongtou Huaxun Terahertz Technology Co.,Ltd. Applicant after:SHENZHEN INSTITUTE OF TERAHERTZ TECHNOLOGY AND INNOVATION Co.,Ltd. Address before:518000 Guangdong Province, Baoan District Xixiang street Shenzhen City Tian Yi Lu Chen Tian Bao Industrial District 37 Building 2 floor East Applicant before:Shenzhen Terahertz System Equipment Co.,Ltd. Applicant before:SHENZHEN INSTITUTE OF TERAHERTZ TECHNOLOGY AND INNOVATION Co.,Ltd. | |
| GR01 | Patent grant | ||
| GR01 | Patent grant |