CN110647170A - Navigation mark inspection device and method based on unmanned aerial vehicle - Google Patents
Navigation mark inspection device and method based on unmanned aerial vehicleDownload PDFInfo
- Publication number
- CN110647170A CN110647170ACN201911036089.6ACN201911036089ACN110647170ACN 110647170 ACN110647170 ACN 110647170ACN 201911036089 ACN201911036089 ACN 201911036089ACN 110647170 ACN110647170 ACN 110647170A
- Authority
- CN
- China
- Prior art keywords
- unmanned aerial
- aerial vehicle
- beacon
- lora
- module
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/10—Simultaneous control of position or course in three dimensions
- G05D1/101—Simultaneous control of position or course in three dimensions specially adapted for aircraft
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Traffic Control Systems (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及无人机技术领域,具体涉及一种基于无人机的航标巡检装置与方法。The invention relates to the technical field of unmanned aerial vehicles, in particular to a navigation mark inspection device and method based on unmanned aerial vehicles.
背景技术Background technique
无人机(UAV,Unmanned Aerial Vehicle),是无人驾驶飞机的简称,是通过无线电遥控设备或自备的程序控制装置实现操纵的不载人飞机。2018年9月份,世界海关组织协调制度委员会(HSC)第62次会议决定,将无人机归类为“会飞的照相机”。由于各国对照相机一般没有特殊的贸易管制要求,无人机以“会飞的照相机”形态按“照相机”监管,促进了无人机的快速发展。Unmanned aerial vehicle (UAV, Unmanned Aerial Vehicle), short for unmanned aircraft, is an unmanned aircraft that is controlled by radio remote control equipment or self-provided program control devices. In September 2018, the 62nd meeting of the Harmonized System Committee (HSC) of the World Customs Organization decided to classify drones as "flying cameras". Since countries generally do not have special trade control requirements for cameras, drones are regulated as "cameras" in the form of "flying cameras", which promotes the rapid development of drones.
近年来,无人机+行业应用,推动了无人机向便携性好、功能全、性能可靠等发展,整体趋势是一机多能、高可靠、宽量程以及平台综合集成。如在电力巡检、遥感测绘、航标工程、农业植保、快递运输、灾难救援、影视拍摄、新闻报道等领域,一方面极大地促进了无人机的发展,另一方面也提升了行业的应用形态。如电力巡检:无人机沿电网进行定位自主巡航,实时传送拍摄影像,监控人员可在电脑上同步收看与操控,相比传统人工巡线的条件艰苦、效率低下等特点,无人机提高了巡检工作的工作效率、安全性。如遥感测绘:无人机平台可快速获取地表信息,获取超高分辨率数字影像和高精度定位数据,生成DEM、三维正射影像图、三维景观模型、三维地表模型等二维、三维可视化数据,便于进行各类环境下应用系统的开发和应用。如航标工程:近年来进入活跃探索阶段,应用无人机在航标配布、灯塔桩选址、现场管理等环节发挥其视觉、空间等技术优势,快速获取项目选址位置周边地形、地貌,通过影像资料结合设计软件的建立起直观的三维模型,利用设计模型进行对比分析,模拟船舶航路并优化设计方案;在航标巡检应用无人机,无人机沿预定飞行路线对航道两侧航标进行空中巡检,搭载的图像采集设备将巡检画面实时传输至航标管理部门,管理人员能全面、清晰、准确地掌握航标的涂色、结构、标位等情况,通过无人机发现隐患后,先由航标管理人员远程分析判断航标失常情况,若根据采集的数据无法确定失常原因,则派航标员到现场排查故障、解决问题;无人机航标巡检内容包括检查航标外形情况及是否移位等,与使用传统船只巡检相比,提高了效率,在夜间巡检中,顺利监测到各个灯浮标的闪亮情况,大大提高了航标夜间巡检的效率,借助光电吊舱的红外镜头,在夜间也可清晰监测航标的外形结构;在航道维护中应用无人机,对水域、航道整治建筑等航道设施进行摄像收集,之后利计算机对数据信息进行相应的加工处理便能够得到所需的巡航资料。In recent years, UAV + industry applications have promoted the development of UAVs towards good portability, full functions, and reliable performance. The overall trend is one machine with multiple functions, high reliability, wide range and comprehensive platform integration. For example, in the fields of electric power inspection, remote sensing surveying and mapping, navigation aid engineering, agricultural plant protection, express transportation, disaster rescue, film and television shooting, news reporting, etc. form. For example, electric power inspection: UAVs conduct autonomous cruises along the power grid, transmit and capture images in real time, and monitor personnel can watch and control them on the computer simultaneously. Compared with traditional manual inspections, which are characterized by harsh conditions and low efficiency, UAVs improve the The work efficiency and safety of the inspection work are improved. For example, remote sensing mapping: UAV platforms can quickly obtain surface information, obtain ultra-high-resolution digital images and high-precision positioning data, and generate 2D and 3D visualization data such as DEM, 3D orthophoto, 3D landscape model, and 3D surface model. , to facilitate the development and application of application systems in various environments. Such as the navigation mark project: In recent years, it has entered an active exploration stage. The application of UAVs in the layout of navigation marks, lighthouse pile site selection, on-site management and other links gives full play to its technical advantages such as vision and space, and quickly obtains the surrounding terrain and landforms of the project site. The data is combined with the design software to establish an intuitive three-dimensional model, and the design model is used for comparative analysis, simulating the ship route and optimizing the design plan; the drone is used in the navigation mark inspection, and the drone conducts aerial surveys of the navigation marks on both sides of the channel along the predetermined flight route. For patrol inspection, the equipped image acquisition equipment transmits the patrol image to the beacon management department in real time, so that managers can fully, clearly and accurately grasp the coloring, structure, and position of the beacon. The navigation mark management personnel will remotely analyze and judge the abnormal situation of the navigation mark. If the cause of the abnormality cannot be determined according to the collected data, the navigation mark will be dispatched to the scene to troubleshoot and solve the problem; the inspection content of the drone navigation mark includes checking the shape of the navigation mark and whether it is displaced, etc. , Compared with the use of traditional ship inspection, the efficiency is improved. During the night inspection, the flashing situation of each light and buoy is successfully monitored, which greatly improves the efficiency of the night inspection of the beacon. With the help of the infrared lens of the photoelectric pod, in the The shape and structure of the beacon can also be clearly monitored at night; drones are used in the maintenance of the waterway, and the waters, waterway renovation buildings and other waterway facilities are photographed and collected, and then the computer can process the data accordingly to obtain the required cruise. material.
在无人机+行业的应用深化过程中,仍然需要针对具体问题开展创新设计,才能发挥无人机的平台优势。如文献CN102183941B发明一种基于民用手机网络的超远程无人机控制系统,采用手机网络实现了对无人机的超远程控制,克服了现有无人机技术中相应控制设备体积大、重量大、功耗大、电磁辐射强的缺点;文献CN104537795B使用无人机、地面行走机器人、控制中心,无人机在植被上方5-20m范围内飞翔,成像光谱仪拍摄地表高光谱图像,高光谱图像和定位信息传输到控制中心,从而提供了一种基于无人机识别定位森林地下火的方法;文献CN106828912B发明一种森林火灾巡航检测无人机,可以自主飞行检测林区的状况,发现火灾并投射定位器定位;为克服无人机在找点和对焦的过程中浪费时间,文献CN109000630A公开了一种无人机巡检标尺,安装方便、速度快,能在任何地形进行安装使用,无人机在飞行的过程中能够准确定位找点;文献CN109856686A针对无人机的lightbridge协议提供了一种无人机的探测装置;为实现常规通讯环境缺失或遭受破坏的极端环境情况下的救援,文献CN109714747A公开了一种通过搭载于无人机平台的LoRa通讯设备收集LoRa节点所发出的求救信息,进而确定救援目标状态及构建与目标之间通讯渠道的方法与系统;文献CN106927044A提供一种航标机群系统和对海洋污染物进行机群监测的方法,航标灯架上设冇用于停载无人机的停机坪,停机坪上设有用于为无人机充电的充电装置,太阳能电池板连接电源模块,电源模块包括蓄电池和充电供电电路,无人机上设有充电接收电路,航标灯架上还设有无线通讯装置和图像处理器,各个无人机接收到起飞指令时起航,摄像装置图像信号传送到航标灯架上的图像处理器,图像处理器将图像信号处理之后发送到岸基控制中心;文献CN204495346U提供了一种采用无人机遥感的航标监管装置,包括无人机和地面监控站,无人机上搭载有飞行控制装置、影像获取装置和通讯装置,地面监控站由监控装置和遥控装置组成,影像获取装置获取航标的图像信号,监控装置通过通讯装置与影像获取装置通讯,遥控装置通过通讯装置与飞行控制装置通讯;文献CN204495345U在文献CN204495346U基础上,在地面监控站将航标的图像信号上传至服务器,客户机通过局域网访问服务器获取航标的图像信号;文献CN109204705A公开了一种浮标管理方法,启用无人机根据预设路线飞行,当无人机飞行到浮标设备上空时摄录浮标设备图像,对浮标整体结构和运行状态进行检测,无人机与浮标设备建立通信连接,读取并存储浮标设备的数据记录,无人机返回管理中心将数据记录传输至管理终端。能够方便检测浮标的运行状态,将浮标所收集的数据传输回来,降低漏检率,大大降低了浮标的维护难度;文献CN109911123A公开了一种航海浮标检测维护系统,包括控制总台、无人机和航标,无人机上设有航标位置核实装置和图像获取装置,控制总台与无人机、无人机与无人机、无人机与航标之间通信连接,采用位置坐标进行维护,准确性高,而且不需要将所有的航标进行图像获取后发送给控制总台,缓解了传输和存储压力。In the process of deepening the application of the UAV+ industry, it is still necessary to carry out innovative designs for specific problems in order to give full play to the platform advantages of UAVs. For example, the document CN102183941B invents an ultra-remote UAV control system based on a civil mobile phone network. The ultra-remote control of the UAV is realized by using the mobile phone network, which overcomes the large volume and weight of the corresponding control equipment in the existing UAV technology. , the disadvantages of large power consumption and strong electromagnetic radiation; document CN104537795B uses drones, ground walking robots, and control centers. The drones fly within 5-20m above the vegetation, and the imaging spectrometer shoots surface hyperspectral images, hyperspectral images and The positioning information is transmitted to the control center, thereby providing a method for identifying and locating forest underground fires based on drones; document CN106828912B invents a forest fire cruise detection drone, which can autonomously fly to detect the condition of the forest area, find fires and project them Locator positioning; in order to overcome the time wasting of drones in the process of finding points and focusing, the document CN109000630A discloses a drone inspection ruler, which is easy to install and fast, and can be installed and used in any terrain. In the process of flying, it can accurately locate and find the point; the document CN109856686A provides a detection device for the drone according to the lightbridge protocol of the drone; in order to realize the rescue in the extreme environment where the conventional communication environment is missing or damaged, the document CN109714747A Disclosed is a method and system for collecting the distress information sent by LoRa nodes through LoRa communication equipment mounted on the UAV platform, and then determining the state of the rescue target and building a communication channel between the target and the target; the document CN106927044A provides a beacon aircraft group system And the method of monitoring the fleet of marine pollutants, the beacon light frame is provided with a parking pad for parking the drone, the parking pad is provided with a charging device for charging the drone, the solar panel is connected to the power module, The power module includes a battery and a charging power supply circuit. The drone is provided with a charging receiving circuit, and the beacon light stand is also provided with a wireless communication device and an image processor. When each drone receives a take-off command, it starts to sail, and the image signal of the camera device is transmitted to the aircraft. The image processor on the beacon light stand, the image processor processes the image signal and sends it to the shore-based control center; the document CN204495346U provides a navigation beacon monitoring device using remote sensing of drones, including drones and ground monitoring stations, without The man-machine is equipped with a flight control device, an image acquisition device and a communication device. The ground monitoring station is composed of a monitoring device and a remote control device. The image acquisition device acquires the image signal of the beacon, the monitoring device communicates with the image acquisition device through the communication device, and the remote control device communicates with the image acquisition device. The device communicates with the flight control device; the document CN204495345U, on the basis of the document CN204495346U, uploads the image signal of the beacon to the server at the ground monitoring station, and the client accesses the server through the local area network to obtain the image signal of the beacon; document CN109204705A discloses a buoy management method, Enable the drone to fly according to the preset route, and record the buoy when the drone flies over the buoy device The device image is used to detect the overall structure and operation status of the buoy. The drone establishes a communication connection with the buoy device, reads and stores the data record of the buoy device, and the drone returns to the management center to transmit the data record to the management terminal. It can easily detect the running state of the buoy, transmit the data collected by the buoy back, reduce the missed detection rate, and greatly reduce the maintenance difficulty of the buoy; the document CN109911123A discloses a marine buoy detection and maintenance system, including a control station and an unmanned aerial vehicle. And beacon, the UAV is equipped with a navigation beacon position verification device and an image acquisition device, and the communication connection between the control station and the UAV, the UAV and the UAV, and the UAV and the beacon are maintained by using the position coordinates, accurate and accurate. It has high performance, and it is not necessary to acquire images of all navigation aids and send them to the control console, which relieves the pressure of transmission and storage.
航标的现场巡检方式优点明显,但不足之处也突出,如受气象条件的影响和制约,视觉航标还需登标捂灯模拟,耗时较长,作业人员易疲惫,危险系数增加;现有遥测遥控巡检弥补了现场巡检的诸多不足,但仍存在:覆盖范围有限,偶有误报漏报,不能显示航标标体外观等主体信息等不足。随着无人机技术的不断完善,承载力持续增强,电池续航能力提升,无人机将大大改变航标行业的维保工作形态,但如果仅仅满足于图像采集及其识别,则应用深度有限,还应该以无人机技术为平台,增强无人机系统与航标设备的互动能力,实现更多的特色应用功能,才能促进更好发展。The on-site inspection method of navigation aids has obvious advantages, but its shortcomings are also prominent. For example, due to the influence and restriction of meteorological conditions, visual navigation aids need to be simulated by boarding the beacon and covering the lights, which takes a long time, makes operators easily tired, and increases the risk factor; There are telemetry and remote control inspections to make up for many shortcomings of on-site inspections, but there are still some shortcomings: limited coverage, occasional false positives and false negatives, and inability to display main information such as the appearance of the beacon. With the continuous improvement of UAV technology, the continuous enhancement of carrying capacity, and the improvement of battery life, UAVs will greatly change the maintenance work form of the navigation mark industry, but if only satisfied with image acquisition and identification, the application depth is limited. It should also use UAV technology as a platform to enhance the interaction between UAV systems and beacon equipment, and realize more characteristic application functions in order to promote better development.
发明内容SUMMARY OF THE INVENTION
本发明针对上述问题,建立一种基于无人机的航标巡检装置与方法,能够实现和航标设备进行数据通讯,完成基于无人机的遥测数据和远程控制功能,特别是航标维保特色功能如捂灯模拟等,为无人机巡检航标,深化行业应用提供新技术支持。In view of the above problems, the present invention establishes a navigation mark inspection device and method based on unmanned aerial vehicle, which can realize data communication with the navigation mark equipment, and complete the telemetry data and remote control functions based on the unmanned aerial vehicle, especially the characteristic function of navigation mark maintenance. Such as lamp cover simulation, etc., to provide new technology support for drone inspection of navigation marks and deepen industry applications.
为达到上述目的,本发明的设计技术方案是:一种基于无人机的航标巡检装置与方法,由无人机、无人机遥控平台、LORA网关终端、LORA子站终端、航标组成,其中,无人机和无人机遥控平台相连,无人机遥控平台和LORA网关终端相连,LORA网关终端和LORA子站终端相连,LORA子站终端和航标相连。In order to achieve the above purpose, the design technical scheme of the present invention is: an unmanned aerial vehicle-based navigation mark inspection device and method, which is composed of an unmanned aerial vehicle, an unmanned aerial vehicle remote control platform, a LORA gateway terminal, a LORA sub-station terminal, and a navigation mark, Among them, the drone is connected to the drone remote control platform, the drone remote control platform is connected to the LORA gateway terminal, the LORA gateway terminal is connected to the LORA sub-station terminal, and the LORA sub-station terminal is connected to the beacon.
所述的无人机,由GPS模块、图像采集模块等组成,所述GPS模块用于获取无人机的位置数据,所述图像采集装置用于获取现场的图像数据信息或视频数据信息。The UAV is composed of a GPS module, an image acquisition module, etc. The GPS module is used to acquire the position data of the UAV, and the image acquisition device is used to acquire the image data information or video data information of the scene.
所述的无人机遥控平台,由Andriod平板电脑、无人机遥控器组成,所述Andriod平板电脑安装有无人机航标巡检APP,通过蓝牙、WIFI、USB和LORA网关终端相连。The drone remote control platform is composed of an Andriod tablet computer and a drone remote controller. The Andriod tablet computer is installed with a drone navigation mark inspection APP, which is connected to the LORA gateway terminal through Bluetooth, WIFI, and USB.
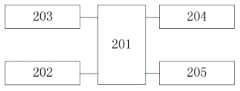
所述的LORA网关终端,由网关终端嵌入式处理器、网关终端LORA模块、蓝牙模块、WIFI模块、网关终端RS485模块组成,其中,嵌入式处理器分别和网关终端LORA模块、蓝牙模块、WIFI模块、网关终端RS485模块相连。The LORA gateway terminal is composed of a gateway terminal embedded processor, a gateway terminal LORA module, a Bluetooth module, a WIFI module, and a gateway terminal RS485 module, wherein the embedded processor is respectively connected with the gateway terminal LORA module, the Bluetooth module, and the WIFI module. , The gateway terminal RS485 module is connected.
所述的LORA子站终端,由子站终端嵌入式处理器、子站终端LORA模块、子站终端RS485模块组成其中,子站终端嵌入式处理器分别和子站终端LORA模块、子站终端RS485模块。The LORA sub-station terminal is composed of a sub-station terminal embedded processor, a sub-station terminal LORA module, and a sub-station terminal RS485 module, wherein the sub-station terminal embedded processor is respectively connected with the sub-station terminal LORA module and the sub-station terminal RS485 module.
所述的航标,由嵌入式微处理器、GPS模块、MODEM模块、LED驱动模块、日光值传感模块和航标RS485模块,嵌入式微处理器分别和GPS模块、MODEM模块、LED驱动模块、日光值传感模块、航标RS485模块相连。Said beacon consists of embedded microprocessor, GPS module, MODEM module, LED drive module, daylight value sensing module and beacon RS485 module, the embedded microprocessor communicates with GPS module, MODEM module, LED drive module, daylight value transmission module respectively The sensor module and the beacon RS485 module are connected.
所述的嵌入式微处器内部有一个工作模式单元Pharos_Mode,保存航标的三种工作模式:正常模式即Pharos_Mode=0、强制模式即Pharos_Mode=1、无人机巡检模式即Pharos_Mode=2,所述正常模式,指航标的亮灭状态(黑夜进入亮、白天进入灭)受日光值控制,所述强制模式,指航标的亮灭状态由指令控制而不是日光值,所述无人机巡检模式,指航标收到无人机巡检控制指令后进入q分钟强制模式,q分钟后退出强制模式恢复到之前的工作模式,通常,q为1~30。The embedded microprocessor has a working mode unit Pharos_Mode, which saves three working modes of the beacon: normal mode, namely Pharos_Mode=0, forced mode, namely Pharos_Mode=1, and drone inspection mode, namely Pharos_Mode=2. In normal mode, the on-off state of the beacon (on at night and off in the daytime) is controlled by the sunlight value. In the forced mode, the on-off state of the beacon is controlled by the command instead of the sunlight value. The drone inspection mode , means that the beacon enters the forced mode for q minutes after receiving the drone inspection control command, and exits the forced mode after q minutes and returns to the previous working mode. Usually, q is 1 to 30.
所述嵌入式微处器内部有一个计时单元UAV_Timer,单位为秒;当航标收到无人机巡检模式报文指令后,其嵌入式微处器将UAV_Timer赋值为m,m的范围为60~1800。There is a timing unit UAV_Timer inside the embedded microprocessor, and the unit is second; when the beacon receives the UAV inspection mode message command, the embedded microprocessor assigns UAV_Timer as m, and the range of m is 60~1800 .
所述嵌入式微处器内部有一个定时器,定时周期为1秒,当进入1秒中断服务程序时,检查UAV_Timer是否为0,如果UAV_Timer不为0,首先保存Pharos_Mode当前值,再将Pharos_Mode赋值为2,航标进入无人机巡检模式,其次控制灯器进入亮状态,然后对UAV_Timer单元进行减一操作,再退出这个中断服务,否则UAV_Timer为0,恢复之前保存Pharos_Mode数值,航标退出无人机巡检模式,再退出该中断服务。There is a timer inside the embedded microprocessor, and the timing period is 1 second. When entering the 1-second interrupt service routine, check whether UAV_Timer is 0. If UAV_Timer is not 0, first save the current value of Pharos_Mode, and then assign Pharos_Mode as 2. The beacon enters the drone inspection mode, and then controls the light to enter the bright state, then decrements the UAV_Timer unit by one, and then exits this interrupt service, otherwise the UAV_Timer is 0, save the Pharos_Mode value before recovery, and the beacon exits the drone Patrol mode, and then exit the interrupt service.
所述的一种基于无人机的航标巡检装置与方法,还包括如下方法和步骤:The described device and method for navigation mark inspection based on unmanned aerial vehicle also includes the following methods and steps:
(1)LORA子站终端定时通过子站终端RS485向航标发送查询报文指令,航标响应查询报文指令回送航标的GPS数据、电压、电流和工作模式等数据;(1) The LORA sub-station terminal regularly sends the query message command to the beacon through the sub-station terminal RS485, and the beacon responds to the query message command and returns the GPS data, voltage, current and working mode of the beacon;
(2)当LORA子站终端收到LORA网关终端的查询报文指令时,会将在步骤(1)获得航标的GPS数据、电压、电流和工作模式等数据回送;当LORA子站终端收到LORA网关终端的控制报文指令时,即刻通过子站终端RS485向航标发送控制报文指令,航标会响应该指令,并将航标的GPS数据、电压、电流和工作模式等数据回送;(2) When the LORA sub-station terminal receives the query message command from the LORA gateway terminal, it will send back the GPS data, voltage, current and working mode of the beacon obtained in step (1); when the LORA sub-station terminal receives When the LORA gateway terminal sends a control message command, it immediately sends a control message command to the beacon through the sub-station terminal RS485, and the beacon will respond to the command and send back the GPS data, voltage, current and working mode of the beacon;
(3)LORA网关终端将接收到的n个LORA子站终端回送的航标数据即LORA网络内n个航标,通过蓝牙、WIFI、USB发送到无人机遥控平台的Andriod平板电脑,并在无人机航标巡检APP上显示LORA网络内n个航标的GPS数据、电压、电流和工作模式等数据;(3) The LORA gateway terminal sends the received beacon data returned by the n LORA sub-station terminals, that is, the n beacons in the LORA network, to the Andriod tablet of the UAV remote control platform through Bluetooth, WIFI, and USB. The GPS data, voltage, current and working mode of n beacons in the LORA network are displayed on the aircraft navigation beacon inspection APP;
(4)LORA网关终端定时自主轮流向LORA子站终端发送查询报文指令;(4) The LORA gateway terminal autonomously and in turn sends query message instructions to the LORA sub-station terminal at regular intervals;
(5)无人机航标巡检APP向LORA网络内n个航标中k个处于非无人机巡检模式的航标发送控制进入无人机巡检模式指令;(5) The UAV navigation beacon inspection APP sends an instruction to control entering the UAV inspection mode to k navigation beacons in the non-UAV inspection mode among the n navigation aids in the LORA network;
(6)无人机航标巡检APP定时检查和无人机距离最近的航标i,如果距离小于M米,通常M为10~50米,提示用户对处于无人机巡检模式的航标i进行拍照或摄像信息;无人机航标巡检APP产生指令通过无人机遥控器控制无人机进行拍照或摄像。(6) The drone navigation beacon inspection APP regularly checks the beacon i that is closest to the drone. If the distance is less than M meters, usually M is 10 to 50 meters, prompting the user to carry out the navigation beacon i in the drone inspection mode. Take pictures or video information; the drone beacon inspection APP generates instructions to control the drone to take pictures or video through the drone remote control.
所述的无人机航标巡检APP,在定时服务程序中,首先将无人机的GPS数据和LORA网络内n个航标的GPS数据进行计算分析,当无人机的位置和某一个航标i的位置接近时,如果航标i不处于无人机巡检模式状态,则产生控制航标i进入无人机巡检模式报文指令,通过蓝牙、WIFI、USB发送到LORA网关终端,再由LORA网关终端发送到LORA子站终端,最后由LORA子站终端发送给航标i;其次,受控进入无人机巡检模式的航标i会回送相应的应答报文,通过LORA子站终端、LORA网关终端回送到无人机遥控平台的Andriod平板电脑,在无人机航标巡检APP上显示;然后,无人机航标巡检APP界面提示用户对处于无人机巡检模式的航标i进行拍照或摄像信息,无人机航标巡检APP产生指令通过无人机遥控器控制无人机进行拍照或摄像。The UAV navigation beacon inspection APP, in the timing service program, first calculates and analyzes the GPS data of the UAV and the GPS data of n navigation beacons in the LORA network. When the position of the beacon i is not in the drone inspection mode, it will generate a message command to control the beacon i to enter the drone inspection mode, and send it to the LORA gateway terminal through Bluetooth, WIFI, and USB, and then by the LORA gateway The terminal is sent to the LORA sub-station terminal, and finally sent to the beacon i by the LORA sub-station terminal; secondly, the beacon i that is controlled to enter the drone inspection mode will send back the corresponding response message, through the LORA sub-station terminal and the LORA gateway terminal. It is sent back to the Andriod tablet of the drone remote control platform and displayed on the drone beacon inspection APP; then, the drone beacon inspection APP interface prompts the user to take a photo or video of the beacon i in the drone inspection mode information, the drone beacon inspection APP generates commands to control the drone to take pictures or video through the drone remote control.
与现有技术方法相比,本发明的有益效果是:实现了基于无人机的航标遥测和远程控制功能,为行业特色应用提供技术支持。Compared with the prior art method, the present invention has the beneficial effects of realizing the functions of navigation mark telemetry and remote control based on unmanned aerial vehicles, and providing technical support for industry-specific applications.
本发明的目的、特征及优点将通过实施例并结合附图进行详细说明。The objects, features and advantages of the present invention will be described in detail through embodiments and in conjunction with the accompanying drawings.
附图说明Description of drawings
图1为本发明的拓扑结构图;Fig. 1 is a topology structure diagram of the present invention;
图2是本发明的LORA网关终端组成框图;Fig. 2 is the LORA gateway terminal composition block diagram of the present invention;
图3是本发明的LORA子站终端组成框图;Fig. 3 is the LORA sub-station terminal composition block diagram of the present invention;
图4是本发明的航标组成框图;Fig. 4 is the composition block diagram of the navigation mark of the present invention;
图5是本发明的无人机航标巡检APP控制流程图;Fig. 5 is the UAV navigation mark inspection APP control flow chart of the present invention;
图6是本发明的航标中嵌入式微处理器的定时中断服务流程图。FIG. 6 is a flow chart of the timing interrupt service of the embedded microprocessor in the beacon of the present invention.
具体实施方式Detailed ways
图1中,101是无人机,102是无人机遥控平台,103是LORA网关终端,104是LORA子站终端,105是航标,其中101与102相连,102和103相连,103与104相连,104与105相连。In Figure 1, 101 is the drone, 102 is the drone remote control platform, 103 is the LORA gateway terminal, 104 is the LORA sub-station terminal, and 105 is the beacon, of which 101 is connected to 102, 102 and 103 are connected, and 103 is connected to 104. , 104 and 105 are connected.
图2中,201是网关终端嵌入式处理器,202是网关终端LORA模块,203是网关终端RS485,204是WIFI模块,205是蓝牙模块,其中,网关终端嵌入式处理器(201)分别和网关终端LORA模块(202)、网关终端RS485(203)、WIFI模块(204)、蓝牙模块(205)相连。In Fig. 2, 201 is the gateway terminal embedded processor, 202 is the gateway terminal LORA module, 203 is the gateway terminal RS485, 204 is the WIFI module, 205 is the Bluetooth module, wherein the gateway terminal embedded processor (201) and the gateway are respectively The terminal LORA module (202), the gateway terminal RS485 (203), the WIFI module (204), and the Bluetooth module (205) are connected.
图3中,301是子站终端嵌入式处理器,302是子站终端LORA模块,303是子站终端RS485,其中,子站终端嵌入式处理器(301)分别和站终端LORA模块(302)、子站终端RS485(303)相连。In Fig. 3, 301 is the sub-station terminal embedded processor, 302 is the sub-station terminal LORA module, and 303 is the sub-station terminal RS485, wherein the sub-station terminal embedded processor (301) and the station terminal LORA module (302) are respectively , the sub station terminal RS485 (303) is connected.
图4中,401是嵌入式微处理器,402是GPS模块,403是MODEM模块,404是LED驱动模块,405是日光值传感模块,406是航标RS485模块,其中,嵌入式微处理器(401)分别和GPS模(402)、MODEM模块(403)、LED驱动模块(404)、日光值传感模块(405)、航标RS485模块(406)相连。In Fig. 4, 401 is an embedded microprocessor, 402 is a GPS module, 403 is a MODEM module, 404 is an LED driver module, 405 is a daylight value sensing module, and 406 is a navigation mark RS485 module, among which, the embedded microprocessor (401) It is respectively connected with the GPS module (402), the MODEM module (403), the LED driving module (404), the sunlight value sensing module (405), and the navigation mark RS485 module (406).
为了进一步说明本发明的具体实施方式,结合图5和图6所示的流程图,对应用本发明所述的一种基于无人机的航标巡检装置与方法作具体描述,包括以下步骤:In order to further illustrate the specific embodiments of the present invention, in conjunction with the flowcharts shown in FIG. 5 and FIG. 6 , a detailed description is made for the application of a UAV-based navigation mark inspection device and method according to the present invention, including the following steps:
步骤500:无人机航标巡检APP定时中断服务开始,执行步骤501;Step 500: The UAV navigation beacon inspection APP starts the timed interruption service, and executes
步骤501:向LORA网络内n个航标中k个处于非无人机巡检模式的航标发送控制进入无人机巡检模式指令,执行步骤502;Step 501: Send an instruction to control entering the drone inspection mode to k navigation beacons in the non-UAV inspection mode among the n navigation beacons in the LORA network, and execute
步骤502:计算无人机和LORA网络内n个航标的距离D米,执行步骤503;Step 502: Calculate the distance D meters between the drone and n beacons in the LORA network, and execute
步骤503:检索获得距离D最小的第i个航标,执行步骤504;Step 503: retrieve and obtain the i-th beacon with the smallest distance D, and execute
步骤504:检查第i个航标距离D是否小于M米,通常M为10~50米,如果是,执行步骤505,否则,执行步骤511;Step 504: Check whether the i-th beacon distance D is less than M meters, usually M is 10 to 50 meters, if so, go to
步骤505:读取第i个航标状态数据,执行步骤506;Step 505: read the i-th beacon status data, and execute
步骤506:检查第i个航标状态无人机巡检模式,如果是,执行步骤507,否则执行步骤508;Step 506: Check the state of the i-th beacon for the drone inspection mode, if yes, go to
步骤507:APP提示操作控制无人机进行拍照或摄像,执行步骤510;Step 507: The APP prompts the operation to control the drone to take pictures or video, and then go to
步骤508:组织控制第i个航标进入无人机巡检模式报文指令,执行步骤509;Step 508: Organize and control the i-th beacon to enter the drone inspection mode message command, and execute
步骤509:将控制报文发送到LORA网关终端,执行步骤511;Step 509: Send the control message to the LORA gateway terminal, and execute
步骤510:APP控制产生指令控制无人机进行拍照或摄像,执行步骤511;Step 510: The APP controls and generates an instruction to control the drone to take pictures or video, and then execute
步骤511:退出。Step 511: Exit.
步骤601:航标中嵌入式微处理器1s定时中断服务开始,执行步骤602;Step 601: The embedded microprocessor in the beacon starts the 1s timing interrupt service, and executes Step 602;
步骤602:检查计时单元UAV_Timer是否为0,如果是,执行步骤606,否则,执行步骤603;Step 602: Check whether the timing unit UAV_Timer is 0, if so, go to Step 606, otherwise, go to Step 603;
步骤603:设置航标为无人机巡检模式,执行步骤604;Step 603: Set the navigation mark to the drone inspection mode, and execute step 604;
步骤604:控制航标LED亮,执行步骤605;Step 604: control the beacon LED to light up, and execute step 605;
步骤605:对UAV_Timer单元进行减一操作,执行步骤607;Step 605: decrement the UAV_Timer unit by one, and perform step 607;
步骤606:航标退出无人机巡检模式,执行步骤607;Step 606: the beacon exits the drone inspection mode, and step 607 is executed;
步骤607:退出。Step 607: Exit.
虽然以上描述了本发明的具体实施方式,但是熟悉本技术领域的技术人员应该理解,我们所描述的具体实施例只是说明性的,而不是用于对本发明范围的限定,任何受本发明技术路线启发所作的等效修饰以及变化,都应当涵盖在本发明权利要求所保护的范围内。Although the specific embodiments of the present invention have been described above, those skilled in the art should understand that the specific embodiments we describe are only illustrative, rather than used to limit the scope of the present invention. Equivalent modifications and changes made by inspiration should be included within the scope of protection of the claims of the present invention.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911036089.6ACN110647170A (en) | 2019-10-29 | 2019-10-29 | Navigation mark inspection device and method based on unmanned aerial vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911036089.6ACN110647170A (en) | 2019-10-29 | 2019-10-29 | Navigation mark inspection device and method based on unmanned aerial vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN110647170Atrue CN110647170A (en) | 2020-01-03 |
Family
ID=68994942
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201911036089.6APendingCN110647170A (en) | 2019-10-29 | 2019-10-29 | Navigation mark inspection device and method based on unmanned aerial vehicle |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110647170A (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112634484A (en)* | 2020-12-14 | 2021-04-09 | 腾讯科技(深圳)有限公司 | Equipment inspection method, device, equipment and storage medium |
| CN113204245A (en)* | 2021-05-19 | 2021-08-03 | 广州海事科技有限公司 | Navigation mark inspection method, system, equipment and storage medium based on unmanned aerial vehicle |
| CN113744427A (en)* | 2021-11-05 | 2021-12-03 | 天津天元海科技开发有限公司 | Navigation mark inspection system and inspection method based on unmanned aerial vehicle remote sensing |
| CN115144883A (en)* | 2022-08-05 | 2022-10-04 | 福建吉星智能科技股份有限公司 | Auxiliary confirmation method for navigation mark position drift |
| CN116573175A (en)* | 2023-04-25 | 2023-08-11 | 交通运输部南海航海保障中心三沙航标处 | Lighthouse pull distance testing system and lighthouse pull distance testing method based on unmanned aerial vehicle technology |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20050028170A (en)* | 2003-09-17 | 2005-03-22 | (주)블루맥스텍 | A remote control system for manless lighthouses |
| CN204495346U (en)* | 2015-04-10 | 2015-07-22 | 交通运输部东海航海保障中心连云港航标处 | A kind of Navigation aid supervision device adopting unmanned aerial vehicle remote sensing |
| CN109451454A (en)* | 2018-10-26 | 2019-03-08 | 华南农业大学 | A kind of vacant lot linkage LoRaWAN communication device and method based on UAV mobile gateway |
| CN208724218U (en)* | 2018-09-29 | 2019-04-09 | 湖北工业大学 | An intelligent navigation aid system based on LoRa communication |
| CN109658670A (en)* | 2018-11-06 | 2019-04-19 | 五邑大学 | A kind of antenna for base station method for inspecting, device, equipment and the storage medium of unmanned plane |
| CN109911123A (en)* | 2019-03-25 | 2019-06-21 | 山东交通学院 | A marine buoy detection and maintenance system |
| CN209105332U (en)* | 2018-11-28 | 2019-07-12 | 沈阳兴迪电子科技有限公司 | A kind of unmanned aerial vehicle onboard monitoring device for bridge automatic detecting |
| CN210835732U (en)* | 2019-10-29 | 2020-06-23 | 福建师范大学 | Beacon inspection device based on unmanned aerial vehicle |
- 2019
- 2019-10-29CNCN201911036089.6Apatent/CN110647170A/enactivePending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20050028170A (en)* | 2003-09-17 | 2005-03-22 | (주)블루맥스텍 | A remote control system for manless lighthouses |
| CN204495346U (en)* | 2015-04-10 | 2015-07-22 | 交通运输部东海航海保障中心连云港航标处 | A kind of Navigation aid supervision device adopting unmanned aerial vehicle remote sensing |
| CN208724218U (en)* | 2018-09-29 | 2019-04-09 | 湖北工业大学 | An intelligent navigation aid system based on LoRa communication |
| CN109451454A (en)* | 2018-10-26 | 2019-03-08 | 华南农业大学 | A kind of vacant lot linkage LoRaWAN communication device and method based on UAV mobile gateway |
| CN109658670A (en)* | 2018-11-06 | 2019-04-19 | 五邑大学 | A kind of antenna for base station method for inspecting, device, equipment and the storage medium of unmanned plane |
| CN209105332U (en)* | 2018-11-28 | 2019-07-12 | 沈阳兴迪电子科技有限公司 | A kind of unmanned aerial vehicle onboard monitoring device for bridge automatic detecting |
| CN109911123A (en)* | 2019-03-25 | 2019-06-21 | 山东交通学院 | A marine buoy detection and maintenance system |
| CN210835732U (en)* | 2019-10-29 | 2020-06-23 | 福建师范大学 | Beacon inspection device based on unmanned aerial vehicle |
Non-Patent Citations (1)
| Title |
|---|
| 谢柳仙: "浅谈航标遥测遥控系统在航道管理中的应用", 珠江水运, no. 9, 15 May 2018 (2018-05-15), pages 72 - 73* |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112634484A (en)* | 2020-12-14 | 2021-04-09 | 腾讯科技(深圳)有限公司 | Equipment inspection method, device, equipment and storage medium |
| CN113204245A (en)* | 2021-05-19 | 2021-08-03 | 广州海事科技有限公司 | Navigation mark inspection method, system, equipment and storage medium based on unmanned aerial vehicle |
| CN113744427A (en)* | 2021-11-05 | 2021-12-03 | 天津天元海科技开发有限公司 | Navigation mark inspection system and inspection method based on unmanned aerial vehicle remote sensing |
| CN115144883A (en)* | 2022-08-05 | 2022-10-04 | 福建吉星智能科技股份有限公司 | Auxiliary confirmation method for navigation mark position drift |
| CN116573175A (en)* | 2023-04-25 | 2023-08-11 | 交通运输部南海航海保障中心三沙航标处 | Lighthouse pull distance testing system and lighthouse pull distance testing method based on unmanned aerial vehicle technology |
| CN116573175B (en)* | 2023-04-25 | 2024-01-26 | 交通运输部南海航海保障中心三沙航标处 | Lighthouse pull distance testing system and lighthouse pull distance testing method based on unmanned aerial vehicle technology |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN210835732U (en) | Beacon inspection device based on unmanned aerial vehicle | |
| CN110647170A (en) | Navigation mark inspection device and method based on unmanned aerial vehicle | |
| CN112422783B (en) | Unmanned aerial vehicle intelligent patrol system based on parking apron cluster | |
| CN202976376U (en) | Forest fire monitoring and emergency command system based unmanned aerial vehicle | |
| CN105511495B (en) | Intelligent inspection control method and system for power line unmanned aerial vehicle | |
| CN105913604B (en) | Assay method and its device occur for the fire based on unmanned plane | |
| CN115348247A (en) | Forest fire detection early warning and decision-making system based on sky-ground integration technology | |
| CN110109480A (en) | A kind of unmanned plane inspection search and rescue system and rescue method based on Multi-sensor Fusion | |
| CN202094531U (en) | Power transmission line inspection device suitable for unmanned aerial vehicle | |
| CN106527475A (en) | Distribution network inspection unmanned aerial vehicle and inspection method thereof | |
| CN106054928A (en) | All-region fire generation determination method based on unmanned plane network | |
| CN102096413A (en) | Security patrol robot system and control method thereof | |
| CN110427041A (en) | A kind of heat-net-pipeline unmanned plane cruise system and method | |
| WO2020000790A1 (en) | Vertical mine shaft detection method and system | |
| CN103455036A (en) | Scene aerial patrol method and aircraft | |
| CN113077561A (en) | Intelligent inspection system for unmanned aerial vehicle | |
| CN114926983A (en) | Traffic accident emergency oriented multi-scale comprehensive sensing method | |
| CN101968913A (en) | Flame tracing method for forest fire area | |
| CN114534134B (en) | Online unmanned full-automatic fire prevention rescue unmanned aerial vehicle device and system that puts out a fire | |
| CN208027170U (en) | A kind of power-line patrolling unmanned plane and system | |
| CN110806230A (en) | Ecological environment monitoring method based on unmanned aerial vehicle | |
| CN206634207U (en) | A kind of modified fire-fighting unmanned plane | |
| CN116421908A (en) | Forest fire prevention and control method and system based on fixed and movable combination | |
| CN105962908A (en) | Flying body temperature detector control method and device | |
| CN113268075A (en) | Unmanned aerial vehicle control method and system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |