CN110108287B - A high-precision map matching method and system for unmanned vehicles based on street light assistance - Google Patents
A high-precision map matching method and system for unmanned vehicles based on street light assistanceDownload PDFInfo
- Publication number
- CN110108287B CN110108287BCN201910474609.5ACN201910474609ACN110108287BCN 110108287 BCN110108287 BCN 110108287BCN 201910474609 ACN201910474609 ACN 201910474609ACN 110108287 BCN110108287 BCN 110108287B
- Authority
- CN
- China
- Prior art keywords
- matching
- point
- relative distance
- standard point
- matching standard
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
- G01C21/30—Map- or contour-matching
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/45—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Lighting Device Outwards From Vehicle And Optical Signal (AREA)
- Navigation (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及无人驾驶技术领域,尤其涉及一种基于路灯辅助的无人车高精度地图匹配方法及系统。The invention relates to the technical field of unmanned vehicles, and in particular, to a method and system for high-precision map matching of unmanned vehicles based on street light assistance.
背景技术Background technique
申请号为CN201610348334.7的国内发明专利公布了一种无人车、无人车定位方法、装置和系统,其方法具体公布了包括:获取与无人车当前位置匹配的第一激光点云反射值数据,其中,第一激光点云反射值数据包括各激光点的第一坐标以及与第一激光点云反射值数据中的各激光点对应的激光反射强度值;将第一激光点云反射值数据转化为地平面内的激光点云投影数据;以预先确定的先验定位位置在激光点云反射值地图中的位置作为初始位置,确定激光点云投影数据在激光点云反射值地图的预定范围内的第一匹配概率;以及基于第一匹配概率确定无人车在激光点云反射值地图中的位置。该实施方式实现了对无人车当前位置的准确定位。The domestic invention patent with the application number CN201610348334.7 discloses an unmanned vehicle, an unmanned vehicle positioning method, device and system, the method specifically disclosed includes: obtaining a first laser point cloud reflection matching the current position of the unmanned vehicle value data, wherein the first laser point cloud reflection value data includes the first coordinates of each laser point and the laser reflection intensity value corresponding to each laser point in the first laser point cloud reflection value data; reflect the first laser point cloud The value data is converted into the laser point cloud projection data in the ground plane; the position of the pre-determined prior positioning position in the laser point cloud reflection value map is used as the initial position to determine the position of the laser point cloud projection data in the laser point cloud reflection value map. a first matching probability within a predetermined range; and determining a position of the unmanned vehicle in the laser point cloud reflection value map based on the first matching probability. This implementation achieves accurate positioning of the current position of the unmanned vehicle.
但是在现实的不同使用情况下,由于不同的天气因素以及其他不可抗力的影响,激光反射率在不同环境下,具有不同的反射率,在使用激光点反射数据来定位,存在一定的偏差。However, in different actual use cases, due to different weather factors and other force majeure influences, the laser reflectivity has different reflectivity in different environments, and there is a certain deviation when using the laser point reflection data to locate.
发明内容SUMMARY OF THE INVENTION
本申请为了解决上述技术问题,提出了一种基于路灯辅助的无人车高精度地图匹配方法及系统。In order to solve the above technical problems, the present application proposes a high-precision map matching method and system for unmanned vehicles based on street light assistance.
一种基于路灯辅助的无人驾驶高精度定位方法,以装置在道理两边的智能路灯为匹配标准点,包括以下步骤:An unmanned high-precision positioning method based on street light assistance, takes the smart street lights installed on both sides of the road as the matching standard point, and includes the following steps:
S1,获取GPS轨迹,在地图模板中匹配对应相似的所述地图模板;S1, obtain the GPS track, and match the corresponding similar map template in the map template;
S2,搜索所述无人车当前所在的GPS轨迹点最近的所述匹配标准点和对应的对侧匹配标准点,获取与所述匹配标准点的匹配相对距离和与所述对侧匹配标准点的对侧匹配相对距离;S2, searching for the closest matching standard point and the corresponding opposite-side matching standard point of the GPS track point where the unmanned vehicle is currently located, and obtaining the matching relative distance from the matching standard point and the opposite-side matching standard point The opposite side matches the relative distance;
S3,判断GPS轨迹点与匹配点之间的相似度是否大于预设值,若判断为是,则将轨迹点匹配到所述地图模板;若判断结果为否,则通过地图匹配算法进行位置调整后重新执行所述步骤S2。S3, determine whether the similarity between the GPS track point and the matching point is greater than a preset value, and if the determination is yes, match the track point to the map template; if the determination result is no, perform position adjustment through a map matching algorithm Then, execute the step S2 again.
本技术方案的优点在于:基于智能路灯,首先活动无人车的GPS信息数据,大致匹配到对应的地图模板中,再与无人车短距离信息交互,获得相对位置信息,由于智能路灯位置确定,再结合无人车自带的GPS接收装置获取自身的GPS信息数据,进行计算后,获得更高精度的定位,进一步精确的在地图中进行校准,完成高精度地图匹配,可排除环境的不可抗因素影响造成的误差。The advantages of this technical solution are: based on the smart street lights, the GPS information data of the active unmanned vehicle is firstly matched to the corresponding map template, and then the short-distance information of the unmanned vehicle is interacted to obtain the relative position information. , and then combined with the GPS receiving device of the unmanned vehicle to obtain its own GPS information data, and after calculation, a higher-precision positioning can be obtained, and further accurate calibration in the map can be performed to complete high-precision map matching, which can eliminate the impossibility of the environment. Errors caused by the influence of anti-factors.
作为优选,所述步骤S2包括:Preferably, the step S2 includes:
S2-1,获取所述地图模板中预设范围内所有匹配标准点的位置信息;S2-1, obtaining the location information of all matching standard points within the preset range in the map template;
S2-2,根据当前的所述GPS轨迹点匹配到最近的所述匹配标准点,根据所述所述匹配标准点匹配到对应的对侧匹配标准点;S2-2, matching to the nearest matching standard point according to the current GPS track point, and matching to the corresponding opposite-side matching standard point according to the matching standard point;
S2-3,获得所述GPS轨迹点到所述匹配标准点的匹配相对距离,并得到匹配相对距离范围圈;获得所述GPS轨迹点到所述对侧匹配标准点的对侧匹配相对距离,并得到对侧匹配相对距离范围圈。S2-3, obtaining the matching relative distance from the GPS track point to the matching standard point, and obtaining a matching relative distance range circle; obtaining the opposite-side matching relative distance from the GPS track point to the opposite-side matching standard point, And get the opposite side matching relative distance range circle.
作为优选,所述步骤S2-2包括:Preferably, the step S2-2 includes:
S2-21,获取最近的所述匹配标准点;S2-21, obtain the closest matching standard point;
S2-22,获取当前所述无人车的状态信息,其中,所述状态信息包括车辆的当前位置信息、当前行驶方向;S2-22, obtaining the current state information of the unmanned vehicle, wherein the state information includes the current position information and the current driving direction of the vehicle;
S2-23,根据所述匹配标准点和所述当前行驶方向选择对应的所述对侧匹配标准点。S2-23: Select the corresponding opposite-side matching standard point according to the matching standard point and the current driving direction.
作为优选,所有的匹配标准点为等价序列形式分布在地图道理的两边。Preferably, all matching standard points are distributed on both sides of the map in the form of equivalent sequences.
作为优选,所述步骤S3包括:Preferably, the step S3 includes:
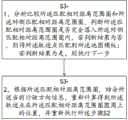
S3-1,分析比较所述匹配相对距离范围圈和所述对侧匹配相对距离范围圈,判断所述匹配相对距离范围圈是否完全落入所述对侧匹配相对距离范围圈内,若判断结果为否,则将所述轨迹点匹配到所述地图模板;若判断结果为是,则执行下一步;S3-1, analyze and compare the matching relative distance range circle and the opposite side matching relative distance range circle, and determine whether the matching relative distance range circle completely falls within the opposite side matching relative distance range circle. If it is no, then match the trajectory point to the map template; if the judgment result is yes, then execute the next step;
S3-2,根据所述匹配相对距离范围圈,结合所述当前行驶方向信息,重新计算得到所述轨迹点在所述匹配相对距离范围圈圆周上的位置,并重新执行所述步骤S2。S3-2, according to the matching relative distance range circle, combined with the current driving direction information, recalculate the position of the trajectory point on the circumference of the matching relative distance range circle, and re-execute the step S2.
作为优选,所述匹配标准点定期自检更新,所述匹配标准点定期自检更新的方法包括以下步骤:Preferably, the matching standard points are periodically self-checked and updated, and the method for regular self-checking and updating of the matching standard points includes the following steps:
SA1,采集所述匹配标准点自身的实时匹配标准点位置数据;SA1, collects the real-time matching standard point position data of the matching standard point itself;
SA2,将所述实时匹配标准点位置数据和所述实时匹配标准点内部存储的安装位置数据进行对比,判断所述实时匹配标准点位置数据和所述安装位置数据是否一致,若判断结果不一致,则向上报告错误消息并且经过预设重检时间后继续执行所述步骤SA2。SA2, compare the real-time matching standard point position data with the installation position data stored inside the real-time matching standard point, and judge whether the real-time matching standard point position data and the installation position data are consistent, if the judgment result is inconsistent, Then, an error message is reported upwards and the step SA2 is continued after the preset recheck time has elapsed.
作为优选,所述实时路灯位置数据包括所述智能路灯自身的经纬度数据和高程数据。Preferably, the real-time street light position data includes longitude and latitude data and elevation data of the smart street light itself.
一种基于路灯辅助的无人车高精度地图匹配系统,以装置在道理两边的智能路灯为匹配标准点,包括:A high-precision map matching system for unmanned vehicles based on street light assistance, using smart street lights installed on both sides of the road as matching standard points, including:
初步匹配模块,用于获取GPS轨迹,在地图模板中匹配对应相似的所述地图模板;Preliminary matching module, for obtaining GPS track, in the map template, matching the corresponding similar map template;
计算匹配模块,用于搜索所述无人车当前所在的GPS轨迹点最近的所述匹配标准点和对应的对侧匹配标准点,获取与所述匹配标准点的匹配相对距离和与所述对侧匹配标准点的对侧匹配相对距离;A calculation matching module is used to search for the closest matching standard point and the corresponding opposite side matching standard point of the GPS track point where the unmanned vehicle is currently located, and obtain the matching relative distance from the matching standard point and the matching standard point with the pair. The opposite side matching relative distance of the side matching standard point;
判断匹配模块,用于判断GPS轨迹点与匹配点之间的相似度是否大于预设值,若判断为是,则将轨迹点匹配到所述地图模板;若判断结果为否,则通过地图匹配算法进行位置调整后重新执行所述计算匹配模块。Judging and matching module, for judging whether the similarity between the GPS track point and the matching point is greater than the preset value, if the judgment is yes, then the track point is matched to the map template; if the judgment result is no, then the map is matched After the algorithm adjusts the position, the calculation and matching module is re-executed.
作为优选,所述计算匹配模块包括:Preferably, the calculation matching module includes:
第一获取单元,用于获取所述地图模板中预设范围内所有匹配标准点的位置信息;a first acquiring unit, configured to acquire the location information of all matching standard points within a preset range in the map template;
对应匹配单元,用于根据当前的所述GPS轨迹点匹配到最近的所述匹配标准点,根据所述匹配标准点匹配到对应的对侧匹配标准点;A corresponding matching unit, used for matching to the closest matching standard point according to the current GPS track point, and matching to the corresponding opposite-side matching standard point according to the matching standard point;
第二获取单元,用于获得所述GPS轨迹点到所述匹配标准点的匹配相对距离,并得到匹配相对距离范围圈;获得所述GPS轨迹点到所述对侧匹配标准点的对侧匹配相对距离,并得到对侧匹配相对距离范围圈。a second obtaining unit, configured to obtain the matching relative distance from the GPS track point to the matching standard point, and obtain a matching relative distance range circle; obtain the opposite-side matching from the GPS track point to the opposite-side matching standard point relative distance and get the opposite side matching relative distance range circle.
作为优选,所述判断匹配模块包括:Preferably, the judging and matching module includes:
分析比较单元,用于分析比较所述匹配相对距离范围圈和所述对侧匹配相对距离范围圈,判断所述匹配相对距离范围圈是否完全落入所述对侧匹配相对距离范围圈内,若判断结果为否,则将所述轨迹点匹配到所述地图模板;若判断结果为是,则执行下一步;An analysis and comparison unit for analyzing and comparing the matching relative distance range circle and the opposite side matching relative distance range circle, and judging whether the matching relative distance range circle completely falls within the opposite side matching relative distance range circle, if If the judgment result is no, then match the trajectory point to the map template; if the judgment result is yes, execute the next step;
修正单元,用于根据所述匹配相对距离范围圈,结合所述当前行驶方向信息,重新计算,修正得到所述轨迹点在所述匹配相对距离范围圈圆周上的位置,并重新执行所述计算匹配模块。a correction unit, configured to recalculate and correct the position of the trajectory point on the circumference of the matching relative distance range circle according to the matching relative distance range circle and in combination with the current driving direction information, and re-execute the calculation matching module.
综上所述,本技术方案的有益效果为:To sum up, the beneficial effects of this technical solution are:
1、基于智能路灯,首先活动无人车的GPS信息数据,大致匹配到对应的地图模板中,再与无人车短距离信息交互,获得相对位置信息,由于智能路灯位置确定,再结合无人车自带的GPS接收装置获取自身的GPS信息数据,进行计算后,获得更高精度的定位,进一步精确的在地图中进行校准,完成高精度地图匹配,可排除环境的不可抗因素影响造成的误差。1. Based on the smart street light, firstly, the GPS information data of the active unmanned vehicle is roughly matched to the corresponding map template, and then it interacts with the short-distance information of the unmanned vehicle to obtain the relative position information. Since the location of the smart street light is determined, combined with the unmanned vehicle The GPS receiving device that comes with the car obtains its own GPS information data, and after calculation, it can obtain higher-precision positioning, and further accurately calibrate in the map to complete high-precision map matching, which can eliminate the influence of the irresistible factors of the environment. error.
2、智能路灯自身将周期性对自己的位置进行自检,确保每个智能路灯的实时路灯位置数据完全无误,确保后续计算结果的有效性和精准性。2. The smart street light itself will periodically self-check its position to ensure that the real-time street light position data of each smart street light is completely correct, and to ensure the validity and accuracy of the subsequent calculation results.
3、采用多个阵列分布在道路两旁的智能灯来进行再次的精度校准,进一步降低了误算的可能性,提高匹配精度。3. Multiple arrays of smart lights distributed on both sides of the road are used for accuracy calibration again, which further reduces the possibility of miscalculation and improves matching accuracy.
附图说明Description of drawings
图1为本发明一种基于路灯辅助的无人车高精度地图匹配方法的流程图;Fig. 1 is a flow chart of a high-precision map matching method for unmanned vehicles based on street light assistance of the present invention;
图2为本发明图1中步骤S2的流程图;Fig. 2 is the flow chart of step S2 in Fig. 1 of the present invention;
图3为本发明图2中步骤S2.2的流程图;Fig. 3 is the flow chart of step S2.2 in Fig. 2 of the present invention;
图4为本发明图1中步骤S3的流程图;Fig. 4 is the flow chart of step S3 in Fig. 1 of the present invention;
图5为本发明路灯位置自检的方法流程图;Fig. 5 is the method flow chart of the self-checking method of the street lamp position of the present invention;
图6为本发明一种基于路灯辅助的无人驾驶高精度定位方法的判断图;6 is a judgment diagram of an unmanned high-precision positioning method based on street light assistance according to the present invention;
图7为本发明一种基于路灯辅助的无人车高精度地图匹配系统的框图;FIG. 7 is a block diagram of a high-precision map matching system for unmanned vehicles based on street light assistance according to the present invention;
图8为图7中计算匹配模块的框图FIG. 8 is a block diagram of the calculation matching module in FIG. 7
图9为图7中判断匹配模块的框图。FIG. 9 is a block diagram of the judging and matching module in FIG. 7 .
具体实施方式Detailed ways
这里使用的术语仅用于描述特定实施例的目的,而不意图限制本发明。 除非另外定义,否则本文使用的所有术语具有与本发明所属领域的普通技术人员通常理解的相同的含义。 将进一步理解的是,常用术语应该被解释为具有与其在相关领域和本公开内容中的含义一致的含义。本公开将被认为是本发明的示例,并且不旨在将本发明限制到特定实施例。The terminology used herein is for the purpose of describing particular embodiments only and is not intended to limit the invention. Unless otherwise defined, all terms used herein have the same meaning as commonly understood by one of ordinary skill in the art to which this invention belongs. It will be further understood that commonly used terms should be interpreted to have meanings consistent with their meanings in the relevant art and this disclosure. This disclosure is to be considered as an example of the invention, and is not intended to limit the invention to the particular embodiments.
在本发明实施例的描述中,需要说明的是,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。In the description of the embodiments of the present invention, it should be noted that the terms "first", "second" and the like are only used to distinguish the description, and cannot be understood as indicating or implying relative importance.
实施例1Example 1
如图1和图6所示,为一种基于路灯辅助的无人车高精度地图匹配方法的流程图。As shown in FIG. 1 and FIG. 6 , it is a flow chart of a high-precision map matching method for unmanned vehicles based on street light assistance.
一种基于路灯辅助的无人车高精度地图匹配方法,以装置在道理两边的智能路灯为匹配标准点,包括以下步骤。A high-precision map matching method for unmanned vehicles based on street light assistance, takes smart street lights installed on both sides of the road as matching standard points, and includes the following steps.
S1,获取GPS轨迹,在地图模板中匹配对应相似的所述地图模板。S1: Acquire a GPS track, and match the corresponding similar map template in the map template.
S2,搜索所述无人车当前所在的GPS轨迹点最近的所述匹配标准点和对应的对侧匹配标准点,获取与所述匹配标准点的匹配相对距离和与所述对侧匹配标准点的对侧匹配相对距离。S2, searching for the closest matching standard point and the corresponding opposite-side matching standard point of the GPS track point where the unmanned vehicle is currently located, and obtaining the matching relative distance from the matching standard point and the opposite-side matching standard point The opposite side matches the relative distance.
S3,判断GPS轨迹点与匹配点之间的相似度是否大于预设值,若判断为是,则将轨迹点匹配到所述地图模板;若判断结果为否,则通过地图匹配算法进行位置调整后重新执行所述步骤S2。S3, determine whether the similarity between the GPS track point and the matching point is greater than a preset value, and if the determination is yes, match the track point to the map template; if the determination result is no, perform position adjustment through a map matching algorithm Then, execute the step S2 again.
基于智能路灯,首先活动无人车的GPS信息数据,大致匹配到对应的地图模板中,再与无人车短距离信息交互,获得相对位置信息,由于智能路灯位置确定,再结合无人车自带的GPS接收装置获取自身的GPS信息数据,进行计算后,获得更高精度的定位,进一步精确的在地图中进行校准,完成高精度地图匹配,可排除环境的不可抗因素影响造成的误差。Based on smart street lights, firstly, the GPS information data of the active unmanned vehicle is roughly matched to the corresponding map template, and then it interacts with the short-distance information of the unmanned vehicle to obtain relative position information. The GPS receiving device of the belt obtains its own GPS information data, and after calculation, a higher-precision positioning is obtained, and further accurate calibration is performed in the map to complete the high-precision map matching, which can eliminate the errors caused by the irresistible factors of the environment.
如图2所示,所述步骤S2包括:As shown in Figure 2, the step S2 includes:
S2-1,获取所述地图模板中预设范围内所有匹配标准点的位置信息。S2-1: Acquire position information of all matching standard points within a preset range in the map template.
S2-2,根据当前的所述GPS轨迹点匹配到最近的所述匹配标准点,根据所述所述匹配标准点匹配到对应的对侧匹配标准点。S2-2, match to the nearest matching standard point according to the current GPS track point, and match to the corresponding opposite-side matching standard point according to the matching standard point.
S2-3,获得所述GPS轨迹点到所述匹配标准点的匹配相对距离,并得到匹配相对距离范围圈;获得所述GPS轨迹点到所述对侧匹配标准点的对侧匹配相对距离,并得到对侧匹配相对距离范围圈。S2-3, obtaining the matching relative distance from the GPS track point to the matching standard point, and obtaining a matching relative distance range circle; obtaining the opposite-side matching relative distance from the GPS track point to the opposite-side matching standard point, And get the opposite side matching relative distance range circle.
进一步的,如图3所示,所述步骤S2-2包括:Further, as shown in Figure 3, the step S2-2 includes:
S2-21,获取最近的所述匹配标准点。S2-21, obtain the closest matching standard point.
S2-22,获取当前所述无人车的状态信息,其中,所述状态信息包括车辆的当前位置信息、当前行驶方向。S2-22: Acquire current state information of the unmanned vehicle, where the state information includes current position information and current driving direction of the vehicle.
S2-23,根据所述匹配标准点和所述当前行驶方向选择对应的所述对侧匹配标准点。S2-23: Select the corresponding opposite-side matching standard point according to the matching standard point and the current driving direction.
所有的匹配标准点为等价序列形式分布在地图道理的两边。All matching standard points are distributed on both sides of the map in the form of an equivalent sequence.
如图4所示,所述步骤S3包括:As shown in Figure 4, the step S3 includes:
S3-1,分析比较所述匹配相对距离范围圈和所述对侧匹配相对距离范围圈,判断所述匹配相对距离范围圈是否完全落入所述对侧匹配相对距离范围圈内,若判断结果为否,则将所述轨迹点匹配到所述地图模板;若判断结果为是,则执行下一步。S3-1, analyze and compare the matching relative distance range circle and the opposite side matching relative distance range circle, and determine whether the matching relative distance range circle completely falls within the opposite side matching relative distance range circle. If no, match the track point to the map template; if the judgment result is yes, execute the next step.
S3-2,根据所述匹配相对距离范围圈,结合所述当前行驶方向信息,重新计算得到所述轨迹点在所述匹配相对距离范围圈圆周上的位置,并重新执行所述步骤S2。S3-2, according to the matching relative distance range circle, combined with the current driving direction information, recalculate the position of the trajectory point on the circumference of the matching relative distance range circle, and re-execute the step S2.
智能路灯自身将周期性对自己的位置进行自检,确保每个智能路灯的实时路灯位置数据完全无误,确保后续计算结果的有效性和精准性。如图5所示,所述匹配标准点定期自检更新,所述匹配标准点定期自检更新的方法包括以下步骤:The smart street light itself will periodically self-check its position to ensure that the real-time street light position data of each smart street light is completely correct, and to ensure the validity and accuracy of subsequent calculation results. As shown in Figure 5, the matching standard point is periodically self-checked and updated, and the method for regular self-checking and updating of the matching standard point includes the following steps:
SA1,采集所述匹配标准点自身的实时匹配标准点位置数据;SA1, collects the real-time matching standard point position data of the matching standard point itself;
SA2,将所述实时匹配标准点位置数据和所述实时匹配标准点内部存储的安装位置数据进行对比,判断所述实时匹配标准点位置数据和所述安装位置数据是否一致,若判断结果不一致,则向上报告错误消息并且经过预设重检时间后继续执行所述步骤SA2。SA2, compare the real-time matching standard point position data with the installation position data stored inside the real-time matching standard point, and judge whether the real-time matching standard point position data and the installation position data are consistent, if the judgment result is inconsistent, Then, an error message is reported upwards and the step SA2 is continued after the preset recheck time has elapsed.
所述实时路灯位置数据包括所述智能路灯自身的经纬度数据和高程数据。The real-time street light position data includes the longitude and latitude data and elevation data of the smart street light itself.
实施例2Example 2
基于实施例1,与实施例不同之处在于:实施例2为基于实施例1之上的系统。Based on Embodiment 1, the difference from Embodiment 2 is that Embodiment 2 is a system based on Embodiment 1.
如图7所示,一种基于路灯辅助的无人车高精度地图匹配系统,以装置在道理两边的智能路灯为匹配标准点,包括:As shown in Figure 7, a high-precision map matching system for unmanned vehicles based on street light assistance takes the smart street lights installed on both sides of the road as the matching standard points, including:
初步匹配模块,用于获取GPS轨迹,在地图模板中匹配对应相似的所述地图模板;Preliminary matching module, for obtaining GPS track, in the map template, matching the corresponding similar map template;
计算匹配模块,用于搜索所述无人车当前所在的GPS轨迹点最近的所述匹配标准点和对应的对侧匹配标准点,获取与所述匹配标准点的匹配相对距离和与所述对侧匹配标准点的对侧匹配相对距离;A calculation matching module is used to search for the closest matching standard point and the corresponding opposite side matching standard point of the GPS track point where the unmanned vehicle is currently located, and obtain the matching relative distance from the matching standard point and the matching standard point with the pair. The opposite side matching relative distance of the side matching standard point;
判断匹配模块,用于判断GPS轨迹点与匹配点之间的相似度是否大于预设值,若判断为是,则将轨迹点匹配到所述地图模板;若判断结果为否,则通过地图匹配算法进行位置调整后重新执行所述计算匹配模块。Judging and matching module, for judging whether the similarity between the GPS track point and the matching point is greater than the preset value, if the judgment is yes, then the track point is matched to the map template; if the judgment result is no, then the map is matched After the algorithm adjusts the position, the calculation and matching module is re-executed.
如图8所示,所述计算匹配模块包括:As shown in Figure 8, the calculation matching module includes:
第一获取单元,用于获取所述地图模板中预设范围内所有匹配标准点的位置信息;a first acquiring unit, configured to acquire the location information of all matching standard points within a preset range in the map template;
对应匹配单元,用于根据当前的所述GPS轨迹点匹配到最近的所述匹配标准点,根据所述匹配标准点匹配到对应的对侧匹配标准点;A corresponding matching unit, used for matching to the closest matching standard point according to the current GPS track point, and matching to the corresponding opposite-side matching standard point according to the matching standard point;
第二获取单元,用于获得所述GPS轨迹点到所述匹配标准点的匹配相对距离,并得到匹配相对距离范围圈;获得所述GPS轨迹点到所述对侧匹配标准点的对侧匹配相对距离,并得到对侧匹配相对距离范围圈。a second obtaining unit, configured to obtain the matching relative distance from the GPS track point to the matching standard point, and obtain a matching relative distance range circle; obtain the opposite-side matching from the GPS track point to the opposite-side matching standard point relative distance and get the opposite side matching relative distance range circle.
如图9所示,所述判断匹配模块包括:As shown in Figure 9, the judging and matching module includes:
分析比较单元,用于分析比较所述匹配相对距离范围圈和所述对侧匹配相对距离范围圈,判断所述匹配相对距离范围圈是否完全落入所述对侧匹配相对距离范围圈内,若判断结果为否,则将所述轨迹点匹配到所述地图模板;若判断结果为是,则执行下一步;An analysis and comparison unit for analyzing and comparing the matching relative distance range circle and the opposite side matching relative distance range circle, and judging whether the matching relative distance range circle completely falls within the opposite side matching relative distance range circle, if If the judgment result is no, then match the trajectory point to the map template; if the judgment result is yes, execute the next step;
修正单元,用于根据所述匹配相对距离范围圈,结合所述当前行驶方向信息,重新计算,修正得到所述轨迹点在所述匹配相对距离范围圈圆周上的位置,并重新执行所述计算匹配模块。a correction unit, configured to recalculate and correct the position of the trajectory point on the circumference of the matching relative distance range circle according to the matching relative distance range circle and in combination with the current driving direction information, and re-execute the calculation matching module.
虽然结合附图描述了本发明的实施方式,但是本领域普通技术人员可以在所附权利要求的范围内做出各种变形或修改。Although the embodiments of the present invention have been described with reference to the accompanying drawings, various changes or modifications may be made by those of ordinary skill in the art within the scope of the appended claims.
Claims (5)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910474609.5ACN110108287B (en) | 2019-06-03 | 2019-06-03 | A high-precision map matching method and system for unmanned vehicles based on street light assistance |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910474609.5ACN110108287B (en) | 2019-06-03 | 2019-06-03 | A high-precision map matching method and system for unmanned vehicles based on street light assistance |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110108287A CN110108287A (en) | 2019-08-09 |
| CN110108287Btrue CN110108287B (en) | 2020-11-27 |
Family
ID=67493561
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910474609.5AActiveCN110108287B (en) | 2019-06-03 | 2019-06-03 | A high-precision map matching method and system for unmanned vehicles based on street light assistance |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110108287B (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114296115B (en)* | 2021-12-28 | 2025-03-25 | 西安易朴通讯技术有限公司 | Nighttime motion trajectory recording method, device, mobile device and storage medium |
| CN114754778B (en)* | 2022-04-02 | 2024-07-12 | 智道网联科技(北京)有限公司 | Vehicle positioning method and device, electronic equipment and storage medium |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103617743B (en)* | 2013-11-22 | 2015-11-18 | 冶金自动化研究设计院 | Based on iron and steel enterprise's Vehicle positioning system and the method for RFID and power carrier |
| CN108897025A (en)* | 2018-05-15 | 2018-11-27 | 艾欧创想智能科技(武汉)有限公司 | High-precision locating method, device, terminal device and computer readable storage medium |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105974453A (en)* | 2015-11-05 | 2016-09-28 | 乐卡汽车智能科技(北京)有限公司 | Difference location method based on intelligent vehicular access cooperation system and intelligent vehicular access cooperation system |
| CN205451514U (en)* | 2016-01-27 | 2016-08-10 | 王德龙 | Car real -time road conditions over --horizon radar of navigation and network alarm system |
| KR102283773B1 (en)* | 2017-03-10 | 2021-07-29 | 현대자동차주식회사 | System for localization by accummulation of LiDAR scanned data use for a automatic driving car and method therefor |
| CN108303721B (en)* | 2018-02-12 | 2020-04-03 | 北京经纬恒润科技有限公司 | Vehicle positioning method and system |
| CN109141444B (en)* | 2018-08-28 | 2019-12-06 | 北京三快在线科技有限公司 | positioning method, positioning device, storage medium and mobile equipment |
| CN109827581B (en)* | 2019-03-28 | 2020-03-13 | 北京三快在线科技有限公司 | Map matching method and device |
- 2019
- 2019-06-03CNCN201910474609.5Apatent/CN110108287B/enactiveActive
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103617743B (en)* | 2013-11-22 | 2015-11-18 | 冶金自动化研究设计院 | Based on iron and steel enterprise's Vehicle positioning system and the method for RFID and power carrier |
| CN108897025A (en)* | 2018-05-15 | 2018-11-27 | 艾欧创想智能科技(武汉)有限公司 | High-precision locating method, device, terminal device and computer readable storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110108287A (en) | 2019-08-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9952597B2 (en) | Apparatus for correcting vehicle location | |
| US10969498B2 (en) | Vehicle positioning method, apparatus and device | |
| JP5028851B2 (en) | Road information detection apparatus and program | |
| CN105489035B (en) | Method for detecting traffic lights applied in active driving technology | |
| CN114252082B (en) | Vehicle positioning method and device and electronic equipment | |
| CN111750881B (en) | Vehicle pose correction method and device based on light pole | |
| WO2020199566A1 (en) | Method and apparatus for updating matching relationship between navigation map and perception image | |
| US11327155B2 (en) | Radar sensor misalignment detection for a vehicle | |
| CN110108287B (en) | A high-precision map matching method and system for unmanned vehicles based on street light assistance | |
| CN111065042B (en) | Method for improving positioning of road side unit, road side unit and system for providing position information | |
| US11353544B2 (en) | Methods and systems for local to global frame transformation | |
| CN111750882B (en) | Method and device for correcting vehicle pose during initialization of navigation map | |
| CN109507699B (en) | Satellite positioning correction method and device for vehicle | |
| KR20190038739A (en) | Method for detecting the changing point of road | |
| CN110187371B (en) | A high-precision positioning method and system for unmanned driving based on street light assistance | |
| CN114076601A (en) | Auxiliary positioning method and device | |
| CN109556634A (en) | Detection method, device, equipment and the readable storage medium storing program for executing of vehicle location ability | |
| CN115698630A (en) | Method for evaluating digital map and evaluation system | |
| CN104422449A (en) | Vehicle navigation method and vehicle navigation device | |
| US20220404170A1 (en) | Apparatus, method, and computer program for updating map | |
| KR20190038740A (en) | Map matching method using reverse tracking map matching | |
| CN117789444A (en) | Parking lot data matching method, device, equipment, medium and vehicle | |
| WO2021171560A1 (en) | High-accuracy map database generation device and high-accuracy map database generation method | |
| CN114449533B (en) | Base station deployment method, environment awareness method, device, computer equipment and storage medium | |
| CN111380536A (en) | Vehicle positioning method and device, electronic equipment and computer readable storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP03 | Change of name, title or address | ||
| CP03 | Change of name, title or address | Address after:350118 Xueyuan Road, new campus of Fuzhou University, Shangjie Town, Minhou County, Fuzhou City, Fujian Province Patentee after:Fujian University of Science and Technology Country or region after:China Address before:350118 Xueyuan Road, new campus of Fuzhou University, Shangjie Town, Minhou County, Fuzhou City, Fujian Province Patentee before:FUJIAN University OF TECHNOLOGY Country or region before:China |