CN110008360B - Establishing method of vehicle target image database containing specific background image - Google Patents
Establishing method of vehicle target image database containing specific background imageDownload PDFInfo
- Publication number
- CN110008360B CN110008360BCN201910278860.4ACN201910278860ACN110008360BCN 110008360 BCN110008360 BCN 110008360BCN 201910278860 ACN201910278860 ACN 201910278860ACN 110008360 BCN110008360 BCN 110008360B
- Authority
- CN
- China
- Prior art keywords
- image
- vehicle
- specific background
- target image
- background image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
- G06F16/51—Indexing; Data structures therefor; Storage structures
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/044—Recurrent networks, e.g. Hopfield networks
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- Data Mining & Analysis (AREA)
- Software Systems (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Biophysics (AREA)
- Molecular Biology (AREA)
- Computing Systems (AREA)
- Biomedical Technology (AREA)
- Computational Linguistics (AREA)
- Mathematical Physics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Databases & Information Systems (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明的技术方案涉及道路车辆的交通控制系统,具体地说是包含特定背景图像的车辆目标图像数据库建立方法。The technical solution of the present invention relates to a traffic control system for road vehicles, and specifically relates to a method for establishing a vehicle target image database including a specific background image.
背景技术Background technique
识别车辆目标是智能驾驶的重要方向,也是智能交通控制系统中的核心技术。由于深度学习神经网络近年来在计算机视觉领域取得了重大进展,基于数据获取、预处理、特征提取、分类等浅层神经网络识别车辆目标逐渐被高识别率的深度学习神经网络识别车辆目标所取代。深度学习神经网络识别车辆目标的关键是要优化网络设计结构,但是这必须有大量车辆目标图像数据库,才能满足训练深度学习神经网络的需求。Identifying vehicle targets is an important direction of intelligent driving, and it is also the core technology in intelligent traffic control systems. Due to the significant progress made by deep learning neural networks in the field of computer vision in recent years, vehicle target recognition based on shallow neural networks such as data acquisition, preprocessing, feature extraction, and classification has gradually been replaced by deep learning neural networks with high recognition rates. . The key to identifying vehicle targets with deep learning neural networks is to optimize the network design structure, but this requires a large number of vehicle target image databases to meet the needs of training deep learning neural networks.
为了建立大量车辆目标图像数据库以满足训练深度学习神经网络的需求,在道路车辆的交通控制系统的现有技术中,经常采用已经制备公开的车辆目标数据库及视频现场采集视频的方法。例如,论文(计算机与数字工程,2019,46(9),1871-1875+1915)利用微软COCO公共数据库;论文(IET Intelligent Transport Systems,2018,12(3):186–193;计算机工程与应用,2018,54(18):154-160)使用CompCars数据库;论文(IEEE Transactions onImage Processing,2018,27(1):432–441)采用KITTI和PASCAL VOC2007数据库;论文(IEEETransactions on Intelligent Transportation Systems,2019,20(2):749–759;计算机与现代化,2017(8),264:56-600)作者的研究小组采用各自电子摄录拍照的方法,获得车辆目标图像数据库;CN106846813A公开了构建城市道路车辆图像数据库的方法,是采用实际采集含视频转换成图像的策略;CN109446973A公开了一种基于深度神经网络图像识别的车辆定位方法,是在不同光照及天气条件下多个时段内采集车辆目标图像样本;CN107633220A公开了一种基于卷积神经网络的车辆前方目标识别方法,需要获取大量车辆交通相关图像作为样本,对收集的图像进行左右镜像化变换,扩充数据集并制作标签。In order to establish a large number of vehicle target image databases to meet the needs of training deep learning neural networks, in the prior art of road vehicle traffic control systems, methods of preparing a public vehicle target database and collecting videos on-site are often used. For example, the paper (Computer and Digital Engineering, 2019, 46(9), 1871-1875+1915) utilizes the Microsoft COCO public database; the paper (IET Intelligent Transport Systems, 2018, 12(3): 186–193; Computer Engineering and Applications , 2018, 54(18): 154-160) using CompCars database; paper (IEEE Transactions on Image Processing, 2018, 27(1): 432-441) using KITTI and PASCAL VOC2007 database; paper (IEEE Transactions on Intelligent Transportation Systems, 2019) , 20(2): 749–759; Computer and Modernization, 2017(8), 264: 56-600) The author’s research group uses their respective electronic recording and photographing methods to obtain a vehicle target image database; CN106846813A discloses the construction of urban roads The method of vehicle image database adopts the strategy of actually collecting and converting video into images; CN109446973A discloses a vehicle positioning method based on deep neural network image recognition, which collects vehicle target images in multiple time periods under different lighting and weather conditions Samples; CN107633220A discloses a method for recognizing objects in front of vehicles based on convolutional neural network, which needs to obtain a large number of vehicle traffic related images as samples, perform left and right mirror transformation on the collected images, expand the data set and make labels.
上述现有技术,使用现有的数据库以及电子摄录车辆目标,并对原采集的视频或者图像进行裁剪,为深度学习神经网络提供真实可靠的车辆目标图像数据库,可以训练深度学习神经网络,但是存在下面缺陷:①真实采集车辆目标图像及视频限制了数据库的种类和数量,必须增加摄录时间或者拍照次数,才能提高数据库的容量;②摄录或者拍照的方法不可能包含所有任意场景中的车辆目标图像,形成的车辆目标图像数据库只能代表部分背景下车辆目标图像,在特定区域和季节拍摄车辆目标图像,不能适应于其它区域及季节背景下的车辆目标图像;③按照增加视频时间提高车辆目标数据库的容量,其人力和物力的耗费量会随着摄录时间而增加。The above-mentioned prior art uses the existing database and electronic recording of vehicle targets, and trims the originally collected videos or images to provide a real and reliable vehicle target image database for the deep learning neural network, which can train the deep learning neural network, but There are the following defects: 1. The real collection of vehicle target images and videos limits the type and quantity of the database, and the capacity of the database must be increased by increasing the recording time or the number of photos; 2. The method of recording or photographing cannot include all the data in any scene. Vehicle target image, the formed vehicle target image database can only represent the vehicle target image in part of the background, and the vehicle target image is shot in a specific area and season, which cannot be adapted to the vehicle target image in other areas and seasonal backgrounds; ③In accordance with the increase of video time, increase The capacity of the vehicle target database, and the consumption of manpower and material resources will increase with the recording time.
归纳起来,在道路车辆的交通控制系统的现有技术中,存在于不同光照及天气条件下多个时段内进行摄录视频及拍照图像采集的车辆目标图像样本,再经过裁剪和左右镜像化变换所制备的车辆目标图像数据库不能适应不同背景和车辆车型的不断增加和更新,而增加车辆目标图像数据库数量的费用高且时间长的缺陷。To sum up, in the prior art of the traffic control system for road vehicles, there are vehicle target image samples collected in multiple periods of time under different lighting and weather conditions for video recording and photographing image collection, and then through cropping and left-right mirroring transformation. The prepared vehicle target image database cannot adapt to the continuous increase and update of different backgrounds and vehicle models, and it is costly and time-consuming to increase the number of vehicle target image databases.
发明内容SUMMARY OF THE INVENTION
本发明所要解决的技术问题是:提供包含特定背景图像的车辆目标图像数据库建立方法,先采集制作特定背景图像,后制作只包含单一车辆图像的车辆目标图像,再将只包含单一车辆的车辆目标图像嵌入到特定背景图像中形成包含特定背景图像的车辆目标图像,重复上述步骤,制备出满足深度学习神经网络对图像数据库的需求并使用深度学习神经网络进行验证的包含特定背景图像的车辆目标图像数据库,有效地克服了在道路车辆的交通控制系统的现有技术中,存在于不同光照及天气条件下多个时段内进行摄录视频及拍照图像采集车辆目标图像样本,再经过裁剪和左右镜像化变换所制备的车辆目标图像数据库不能适应不同背景和车辆车型的不断增加和更新,而增加车辆目标图像数据库数量的费用高且时间长的缺陷。The technical problem to be solved by the present invention is: to provide a method for establishing a vehicle target image database containing a specific background image, first collecting and producing a specific background image, then producing a vehicle target image containing only a single vehicle image, and then converting the vehicle target image containing only a single vehicle The image is embedded into a specific background image to form a vehicle target image containing a specific background image, and the above steps are repeated to prepare a vehicle target image containing a specific background image that meets the needs of the deep learning neural network for the image database and is verified by the deep learning neural network. The database effectively overcomes the existing technology in the traffic control system of road vehicles, which exists in multiple periods of time under different lighting and weather conditions. The vehicle target image database prepared by the transformation cannot adapt to the continuous increase and update of different backgrounds and vehicle models, and it is costly and time-consuming to increase the number of vehicle target image databases.
本发明解决该技术问题所采用的技术方案是:包含特定背景图像的车辆目标图像数据库建立方法,所制备的包含特定背景图像的车辆目标图像数据库要使用深度学习神经网络进行验证,具体步骤如下:The technical solution adopted by the present invention to solve the technical problem is: a method for establishing a vehicle target image database containing a specific background image, and the prepared vehicle target image database containing the specific background image is verified by using a deep learning neural network, and the specific steps are as follows:
第一步,采集制作特定背景图像:The first step is to collect and make a specific background image:
通过拍照或网络下载方法,采集制作特定背景图像,所采集制作特定背景图像要求如下:Collect and make a specific background image by taking pictures or downloading from the network. The requirements for collecting and making a specific background image are as follows:
(1.1)特定背景图像中所包含的图像内容:(1.1) Image content contained in a specific background image:
特定背景图像中所包含的图像内容为,车道图像加树木图像、建筑物图像、山脉图像和路标图像中的1~4种;The image content contained in the specific background image is one to four of the lane image plus tree image, building image, mountain image and road sign image;
(1.2)特定背景图像的像素点大小:(1.2) Pixel size of a specific background image:
特定背景图像像素点大小为N像素×M像素,即纵向为N像素,横向为M像素,特定背景图像像素点≥被背景图像所包含的待制备的车辆目标图像像素点;The pixel size of the specific background image is N pixels×M pixels, that is, N pixels in the vertical direction and M pixels in the horizontal direction, and the specific background image pixels ≥ the vehicle target image pixels to be prepared contained in the background image;
(1.3)计算特定背景图像下底边单位像素表示的实际宽度:(1.3) Calculate the actual width represented by the unit pixel of the bottom edge under a specific background image:
设定标准车道的宽度为L米,根据特定背景图像下底边中车道所占有I像素,用如下公式(1)计算出特定背景图像的下底边单位像素表示的实际宽度R,The width of the standard lane is set to be L meters. According to the 1 pixel occupied by the lane in the bottom edge of the specific background image, the actual width R represented by the unit pixel of the bottom edge of the specific background image is calculated by the following formula (1).

上述公式(1)中,R的单位为米/像素;In the above formula (1), the unit of R is m/pixel;
第二步,制作只包含单一车辆图像的车辆目标图像:The second step is to make a vehicle target image that contains only a single vehicle image:
通过拍照或网络下载方法,采集并制作只包含单一车辆图像的车辆目标图像,该只包含单一车辆图像的车辆目标图像的要求如下:Collect and produce a vehicle target image containing only a single vehicle image by taking a photo or downloading from the network. The requirements for the vehicle target image containing only a single vehicle image are as follows:
(2.1)采集单一目标车辆的正面图像;(2.1) Collect the frontal image of a single target vehicle;
(2.2)按照所采集制作车辆目标图像的车辆的大小及形状,分成不同车型;(2.2) According to the size and shape of the collected vehicle target image, it is divided into different models;
(2.3)当拍照或网络下载的车辆目标图像中包含相应的原始背景图像时,通过图像处理软件将该原始背景图像删除,这样在采集和变换的车辆目标图像中只包含单一目标车辆图像,该车辆目标图像中的车辆宽度为J像素,采集车辆目标图像中的车辆宽度像素J要大于0.9倍的特定背景图像下底边中车道所占有I像素;(2.3) When the corresponding original background image is included in the vehicle target image captured or downloaded from the network, the original background image is deleted by the image processing software, so that the collected and transformed vehicle target image only contains a single target vehicle image. The vehicle width in the vehicle target image is J pixels, and the vehicle width pixel J in the collected vehicle target image is greater than 0.9 times the specific background image, and the lane in the bottom edge occupies I pixels;
(2.4)计算车辆宽度对应像素点:(2.4) Calculate the pixels corresponding to the width of the vehicle:
根据上述(2.2)步中所述的不同车型,测定其宽度为W米,用如下公式(2)计算相应该车型横向对应上述第一步采集制作的特定背景图像的像素D,According to the different vehicle models described in the above step (2.2), the width is determined to be W meters, and the following formula (2) is used to calculate the corresponding pixel D of the vehicle horizontally corresponding to the specific background image collected and produced in the first step above,

公式(2)中,fix()表示取整;In formula (2), fix() means rounding;
第三步,将只包含单一车辆图像的车辆目标图像嵌入特定背景图像中:The third step is to embed the vehicle target image, which contains only a single vehicle image, into a specific background image:
将上述第二步制作的只包含单一车辆图像的车辆目标图像嵌入上述第一步采集制作的特定背景图像中,具体操作方法如下:Embed the vehicle target image that only contains a single vehicle image produced in the second step above into the specific background image collected and produced in the first step above. The specific operation method is as follows:
(3.1)调整车辆目标图像的大小:(3.1) Adjust the size of the vehicle target image:
用如下公式(3)分别计算上述第二步制作的只包含单一车辆图像的车辆目标图像横向和纵向的调整系数E,Use the following formula (3) to calculate the horizontal and vertical adjustment coefficients E of the vehicle target image that only contains a single vehicle image produced in the second step above,

依据调整系数E的数值来调整车辆目标图像的大小,调整大小后的车辆目标图像用于下一步的车辆目标图像嵌入特定背景图像中;The size of the vehicle target image is adjusted according to the value of the adjustment coefficient E, and the resized vehicle target image is used to embed the vehicle target image in the next step into a specific background image;
(3.2)将只包含单一车辆图像的车辆目标图像嵌入采集制作的特定背景图像中:(3.2) Embed a vehicle target image containing only a single vehicle image into a specific background image produced by acquisition:
在上述第一步采集制作的特定背景图像中显示的车道图像中心位置附近,嵌入上述(3.1)步已经调整大小的车辆目标图像,该车辆目标图像放置在上述第一步采集制作的特定背景图像下底边以上的位置,该车辆目标图像前轮着地,轮胎占据在上述第一步采集制作的特定背景图像中的车道位置,该车辆目标图像是不透明的;In the vicinity of the center position of the lane image displayed in the specific background image collected and produced in the first step above, the vehicle target image that has been resized in the above step (3.1) is embedded, and the vehicle target image is placed in the specific background image collected and produced in the first step above. The position above the bottom edge, the front wheel of the vehicle target image is on the ground, the tire occupies the lane position in the specific background image collected and produced in the first step above, and the vehicle target image is opaque;
(3.3)依据上述第一步采集制作的特定背景图像中车道的大小确定该特定背景图像宽度像素表示的实际宽度,结合目标车辆宽度确定该车辆目标图像占据特定背景图像中横向像素的数量;(3.3) Determine the actual width represented by the width of the specific background image according to the size of the lane in the specific background image collected and produced in the first step above, and determine the number of horizontal pixels in the specific background image that the vehicle target image occupies in combination with the width of the target vehicle;
(3.4)调整只包含单一车辆图像的车辆目标图像像素点的数量,要保持该车辆目标图像的横向与纵向同样比例变化,只改变该车辆目标图像的大小,车辆形状保持不变;(3.4) To adjust the number of pixel points of the vehicle target image that only contains a single vehicle image, keep the horizontal and vertical changes of the vehicle target image in the same proportion, only change the size of the vehicle target image, and the vehicle shape remains unchanged;
由此制成包含特定背景图像的单一车辆图像的车辆目标图像;Thereby, a vehicle object image containing a single vehicle image of a specific background image is produced;
第四步,制作包含特定背景图像的车辆目标图像数据库:The fourth step is to make a vehicle target image database containing a specific background image:
重复上述第二步至第三步的步骤,对于所有的不同车型均制备包含特定背景图像的单一车辆图像的车辆目标图像数据库,制备的不同车型的包含特定背景图像的单一车辆图像的车辆目标图像均≥100张,由此完成制作包含特定背景图像的车辆目标图像数据库,以满足深度学习神经网络对图像数据库的需求;Repeat the steps from the second step to the third step above, prepare a vehicle target image database containing a single vehicle image of a specific background image for all different vehicle models, and prepare a vehicle target image of a single vehicle image containing a specific background image for different vehicle models All ≥100 images, thus completing the production of a vehicle target image database containing specific background images to meet the needs of deep learning neural networks for image databases;
第五步,用深度学习神经网络对制备的包含特定背景图像的车辆目标图像数据库进行验证:The fifth step is to use a deep learning neural network to verify the prepared vehicle target image database containing a specific background image:
对上述第四步制作的包含特定背景图像的不同车型的单一车辆图像的车辆目标图像数据库,进一步变换包含特定背景图像的车辆目标图像的大小,作为深度学习神经网络输入,验证深度学习神经网络对制备可变背景车辆目标图像数据库的识别能力;For the vehicle target image database of single vehicle images of different models of different models with a specific background image produced in the fourth step above, the size of the vehicle target image containing the specific background image is further transformed as the input of the deep learning neural network to verify the deep learning neural network. Recognition ability to prepare a variable background vehicle target image database;
至此,完成包含特定背景图像的车辆目标图像数据库建立。So far, the establishment of the vehicle target image database containing the specific background image is completed.
上述包含特定背景图像的车辆目标图像数据库建立方法,所述不同车型是越野车、轿车、公交车和面包车这四类车型。In the above-mentioned method for establishing a vehicle target image database containing a specific background image, the different vehicle types are four types of vehicle types: off-road vehicles, cars, buses and vans.
上述包含特定背景图像的车辆目标图像数据库建立方法,所述越野车的宽度为1.9米,轿车的宽度为1.7米,公交车的宽度为2.5米,面包车的宽度为1.5米。In the above method for establishing a vehicle target image database containing a specific background image, the width of the off-road vehicle is 1.9 meters, the width of the car is 1.7 meters, the width of the bus is 2.5 meters, and the width of the van is 1.5 meters.
上述包含特定背景图像的车辆目标图像数据库建立方法,所述设定标准车道的宽度为3.75米。In the above-mentioned method for establishing a vehicle target image database including a specific background image, the width of the standard lane is set to be 3.75 meters.
上述包含特定背景图像的车辆目标图像数据库建立方法,同样适用于越野车、轿车、公交车和面包车这四类车型之外的其他车型。The above-mentioned method for establishing a vehicle target image database containing a specific background image is also applicable to other types of vehicle types other than off-road vehicles, sedans, buses and vans.
上述包含特定背景图像的车辆目标图像数据库建立方法,所述通过图像处理软件将采集车辆目标背景图像删除,这里所用的图像处理软件是Windows中自带的绘图软件。In the above-mentioned method for establishing a vehicle target image database including a specific background image, the background image of the collected vehicle target is deleted through image processing software, and the image processing software used here is the drawing software that comes with Windows.
上述包含特定背景图像的车辆目标图像数据库建立方法,所述深度学习神经网络是深度学习神经网络LeNet-5。In the above method for establishing a vehicle target image database containing a specific background image, the deep learning neural network is the deep learning neural network LeNet-5.
上述包含特定背景图像的车辆目标图像数据库建立方法,所涉及的操作方法是本技术领域所公知的。The above-mentioned method for establishing a vehicle target image database including a specific background image involves operating methods that are well known in the art.
本发明的有益效果是:与现有技术相比,本发明的突出的实质性特点和显著进步如下:The beneficial effects of the present invention are: compared with the prior art, the outstanding substantive features and remarkable progress of the present invention are as follows:
(1)本发明方法采用特定背景图像和车辆目标图像合成的方法,分别采集特定背景图像和车辆目标图像,两者相互独立,因此根据需求来选择不同的特定背景图像,采集制作特定背景图像和车辆目标图像很方便合成为包含特定背景图像的车辆目标图像数据库,无需多次在不同的实际背景中采集背景的视频或者图像,并且一次按需要采集制作的特定背景图像制备出包含不同背景图像的车辆目标图像数据库,因此本发明方法具有容易拓展及成本低特点。(1) The method of the present invention adopts the method of synthesizing a specific background image and a vehicle target image, and collects the specific background image and the vehicle target image respectively, and the two are independent of each other. The vehicle target image is easily synthesized into a vehicle target image database containing a specific background image. It is not necessary to collect background videos or images in different actual backgrounds multiple times. Therefore, the method of the present invention has the characteristics of easy expansion and low cost.
(2)现有技术在采集车辆视频以及图像然后裁剪方法中,只能由实际景物确定车辆目标图像的背景图像,不能改变背景图像,本发明方法,在相同特定背景图像下嵌入不同车辆目标图像,背景图像表示实际区域的图像不变,相当于固定焦距下摄录或者拍照车辆目标图像,同时可以任意改变背景图像,拓展不同背景图像下车辆目标图像,很容易拓展车辆目标图像数据库的容量。(2) In the prior art, in the method of collecting vehicle video and images and then cropping, the background image of the vehicle target image can only be determined by the actual scene, and the background image cannot be changed. The method of the present invention embeds different vehicle target images under the same specific background image. , the background image indicates that the image of the actual area remains unchanged, which is equivalent to recording or photographing the vehicle target image at a fixed focal length. At the same time, the background image can be arbitrarily changed to expand the vehicle target image under different background images, and it is easy to expand the capacity of the vehicle target image database.
(3)建立包含特定背景图像的车辆目标图像数据库的现有相关技术中,经常采用现有公开的车辆目标数据库,典型如CompCars和COCO,这些数据库是第三方采集,在拍摄现场的背景图像下制备形成,不可能包含各个地区以及所有季节的背景图像,在不同背景图像下会影响由此制成的车辆目标数据库深度学习神经网络的识别能力,本发明方法克服了采用某些地区及特定时间采集车辆目标图像推广应用到另一个特定区域的缺陷,利用可改变的特定背景图像,合成包含特定背景图像的车辆目标图像数据库,适应于不同地区和不同季节的背景图像,具有很强的推广性。(3) In the related art of establishing a vehicle target image database containing a specific background image, existing public vehicle target databases, such as CompCars and COCO, are often used. These databases are collected by a third party, under the background image of the shooting scene. It is impossible to include background images of various regions and all seasons. Under different background images, it will affect the recognition ability of the deep learning neural network of the vehicle target database made therefrom. The method of the present invention overcomes the need for certain regions and specific times. The defects of collecting vehicle target images and applying them to another specific area, using the specific background images that can be changed, synthesizing the vehicle target image database containing the specific background images, which are suitable for the background images of different regions and different seasons, and have strong promotion. .
(4)在一个地区现场采集视频及拍照得到的背景图像不能直接推广到其它地区,如果对对所有车辆监控点采集车辆视频,需要投入庞大的资金和巨大的工作量,本发明采用分别独立采集特定背景图像及车辆目标图像,然后利用图像合成的方法,简化了建立包含特定背景图像的车辆目标图像数据库的工作量,降低了成本。(4) The background images obtained by collecting videos and taking pictures on the spot in one area cannot be directly extended to other areas. If the vehicle video is collected for all vehicle monitoring points, huge capital and huge workload need to be invested. The present invention adopts separate collection A specific background image and a vehicle target image are used, and then the method of image synthesis is used, which simplifies the workload of establishing a vehicle target image database including the specific background image, and reduces the cost.
(5)采集车辆视频以及图像然后裁剪的现有技术中,采集到同一位置车辆目标图像需要大量视频,很难实现不同车辆完全重合在同一位置的图像,而本发明方法将车辆目标图像嵌入特定背景图像,很容易实现同一位置的不同车辆目标图像。(5) In the prior art of collecting vehicle videos and images and then cropping them, a large amount of video is required to collect a vehicle target image at the same position, and it is difficult to achieve images of different vehicles completely overlapping at the same position. The method of the present invention embeds the vehicle target image into a specific Background image, it is easy to achieve different vehicle target images at the same location.
(6)本发明利用实际道路宽度与待制图像数据库特定背景图像下底边的像素,确定特定背景图像下底边表示实际宽度,确定待制图像数据库背景图像与实际景物的对应关系,真实反映出特定背景图像中表示的空间位置。(6) The present invention utilizes the actual width of the road and the pixels of the bottom edge of the specific background image of the image database to be produced to determine that the bottom edge of the specific background image represents the actual width, to determine the corresponding relationship between the background image of the image database to be produced and the actual scene, and to truly reflect the spatial location represented in a particular background image.
(7)本发明利用实际典型车辆宽度结合特定背景图像下底边表示实际宽度,调整车辆目标图像宽度,并进而调整车辆目标图像的高度,实现车辆目标图像与特定背景图像的对应关系。(7) The present invention uses the actual typical vehicle width combined with the bottom edge of the specific background image to represent the actual width, adjusts the width of the vehicle target image, and then adjusts the height of the vehicle target image to realize the corresponding relationship between the vehicle target image and the specific background image.
(8)与单独采用不含背景图像的车辆目标图像数据库用于深度学习神经网络训练相比,本发明建立的包含特定背景图像的车辆目标图像数据库,由于包含了背景图像,更接近实际车辆目标的识别。(8) Compared with using the vehicle target image database without background image alone for deep learning neural network training, the vehicle target image database containing specific background images established by the present invention is closer to the actual vehicle target due to the inclusion of background images. identification.
(9)本发明包含特定背景图像的车辆目标图像数据库建立方法,制备的包含特定背景图像的车辆目标图像数据库,除了用于深度学习神经网络外,可以推广到其它网络训练、车辆目标图像特征提取及识别。(9) The method for establishing a vehicle target image database including a specific background image of the present invention, and the prepared vehicle target image database including a specific background image can be extended to other network training, vehicle target image feature extraction, in addition to being used for deep learning neural networks. and identification.
(10)CN106846813A构建城市道路车辆图像数据库的方法,采用实际采集含视频转换成图像方法,是根据车型种类、不同场景、拍摄角度、光照变化和天气情况这些因素,确定数据采集方案并采集道路车辆原始视频,将原始视频转为图像,使用梯形框划定图像中的感兴趣区域,对梯形框以外的非感兴趣区域进行模糊化处理,标注感兴趣区域内的车辆图像,获得车辆数据库;本发明采用特定背景和车辆目标图像合成的方法,采集特定背景图像和车辆目标图像很方便合成包含特定背景图像的车辆目标图像数据库,无需在特定背景中再采集视频或者图像,并且背景图像可以改变,制备不同背景图像下车辆目标图像数据库,具有容易拓展及成本低特点。(10) CN106846813A The method of constructing an image database of urban road vehicles, using the method of converting actual collection including video into images, is to determine the data collection plan and collect road vehicles according to factors such as vehicle type, different scenes, shooting angles, lighting changes and weather conditions Original video, convert the original video into an image, use a trapezoidal frame to delineate the area of interest in the image, blur the non-interested area outside the trapezoidal frame, mark the vehicle images in the area of interest, and obtain the vehicle database; The invention adopts the method of synthesizing a specific background and a vehicle target image, and collecting the specific background image and the vehicle target image is very convenient to synthesize a vehicle target image database including the specific background image, without the need to collect video or images in the specific background, and the background image can be changed, The preparation of vehicle target image database under different background images has the characteristics of easy expansion and low cost.
(11)CN109446973A一种基于深度神经网络图像识别的车辆定位方法,是在不同光照及天气条件下的多个时段内进行图像样本采集,本发明采用特定背景图像和车辆目标图像合成的方法,采集特定背景图像和车辆目标图像很方便合成包含特定背景图像的车辆目标图像数据库,无需在特定背景图像中再采集视频或者图像,并且背景图像可以改变,制备不同背景图像下的车辆目标图像数据库,具有容易拓展及成本低特点。(11) CN109446973A A vehicle positioning method based on deep neural network image recognition, which is to collect image samples in multiple time periods under different lighting and weather conditions. The specific background image and the vehicle target image are very convenient to synthesize the vehicle target image database containing the specific background image. There is no need to collect video or images in the specific background image, and the background image can be changed, and the vehicle target image database under different background images can be prepared. Easy to expand and low cost.
(12)CN107633220A一种基于卷积神经网络的车辆前方目标识别方法,需要获取大量车辆交通相关图像作为样本,对收集的图像进行左右镜像化变换,扩充数据集并制作标签;本发明采用特定背景图像和车辆目标图像合成的方法,采集特定背景图像和车辆目标图像很方便合成包含特定背景图像的车辆目标图像数据库,无需在特定背景图像中再采集视频或者图像,并且背景图像可以改变,制备不同背景图像下车辆目标图像数据库,具有容易拓展及成本低特点。(12) CN107633220A A method for recognizing objects in front of vehicles based on convolutional neural network, it is necessary to obtain a large number of vehicle traffic related images as samples, perform left and right mirror transformation on the collected images, expand the data set and make labels; the present invention adopts a specific background The method of synthesizing image and vehicle target image, collecting a specific background image and a vehicle target image is very convenient to synthesize a vehicle target image database containing a specific background image, without the need to collect video or images in the specific background image, and the background image can be changed. The vehicle target image database under the background image has the characteristics of easy expansion and low cost.
附图说明Description of drawings
下面结合附图和实施例对本发明进一步说明。The present invention will be further described below with reference to the accompanying drawings and embodiments.
图1为本发明方法的操作流程示意框图。FIG. 1 is a schematic block diagram of the operation flow of the method of the present invention.
图2为本发明实施例中所采集的特定背景图像的示意图。FIG. 2 is a schematic diagram of a specific background image collected in an embodiment of the present invention.
图3为本发明实施例中所采集的不含背景图像的越野车目标图像的示意图。FIG. 3 is a schematic diagram of an off-road vehicle target image without a background image collected in an embodiment of the present invention.
图4为本发明实施例中所制备的含图2所示特定背景图像的越野车目标图像的示意图。FIG. 4 is a schematic diagram of an off-road vehicle target image including the specific background image shown in FIG. 2 prepared in an embodiment of the present invention.
图5为本发明实施例中所采集的不含背景图像的轿车目标图像的示意图。FIG. 5 is a schematic diagram of a car target image without a background image collected in an embodiment of the present invention.
图6为本发明实施例中所制备的含图2所示特定背景图像的轿车目标图像的示意图。FIG. 6 is a schematic diagram of a car target image including the specific background image shown in FIG. 2 prepared in an embodiment of the present invention.
图7为本发明实施例中所采集的不含背景图像的公交车目标图像的示意图。FIG. 7 is a schematic diagram of a bus target image without a background image collected in an embodiment of the present invention.
图8为本发明实施例中所制备的含图2所示特定背景图像的公交车目标图像的示意图。FIG. 8 is a schematic diagram of a bus target image including the specific background image shown in FIG. 2 prepared in an embodiment of the present invention.
图9为本发明实施例中所采集的不含背景图像的面包车目标图像的示意图。FIG. 9 is a schematic diagram of a van target image without a background image collected in an embodiment of the present invention.
图10为本发明实施例中所制备的含图2所示特定背景图像下面包车目标图像的示意图。FIG. 10 is a schematic diagram of a target image of a van under the specific background image shown in FIG. 2 prepared in an embodiment of the present invention.
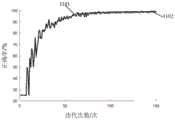
图11为本发明实施例中深度学习神经网络训练和测试所制备的包含特定背景图像的车辆目标图像数据库的准确率曲线。FIG. 11 is an accuracy curve of a vehicle target image database including a specific background image prepared by deep learning neural network training and testing in an embodiment of the present invention.
图中,201.高速路路边树木,202.高速水泥防撞墩,203.车道分界实线,204.高速行车车道(I),205.车道分界虚线,206.高速行车车道(II),207.高速隔离带及树木,401.越野车目标图像嵌入高速路背景图像中越野车目标图像的示意图,601.轿车目标图像嵌入高速路背景图像中轿车目标图像的示意图,801.嵌入高速路背景图像中公交车目标图像的示意图,1001.面包车目标图像嵌入高速路背景图像中面包车目标图像的示意图,1101.训练集为四类车辆每类140张车辆目标图像的深度学习神经网络识别率,1102.测试集为四类车辆每类60张车辆目标图像的深度学习神经网络识别率。In the figure, 201. Trees on the roadside of the expressway, 202. High-speed cement anti-collision pier, 203. The solid line of the lane boundary, 204. The high-speed driving lane (I), 205. The dotted line of the lane boundary, 206. The high-speed driving lane (II), 207. High-speed isolation belt and trees, 401. Schematic diagram of off-road vehicle target image embedded in highway background image, 601. Schematic diagram of car target image embedded in highway background image, 801. Embedding of highway background image Schematic diagram of the target image of the bus in the image, 1001. Schematic diagram of the target image of the van embedded in the background image of the expressway, 1101. The training set is a deep learning neural network recognition rate of 140 vehicle target images for each of four types of vehicles, 1102 .The test set is the recognition rate of deep learning neural network of 60 vehicle target images for each of four types of vehicles.
具体实施方式Detailed ways
图1所示实施例表明,本发明的操作流程是:采集制作特定背景图像,计算特定背景图像下底边单位像素表示的实际宽度→制作只包含单一车辆图像的车辆目标图像并计算车辆宽度对应像素点→调整车辆目标图像的大小将车辆目标图像嵌入特定背景图像中→重复上述第二步至第三步的步骤,制作包含特定背景图像的车辆目标图像数据库→用深度学习神经网络对制备的包含特定背景图像的车辆目标图像数据库进行验证。The embodiment shown in FIG. 1 shows that the operation flow of the present invention is: collecting and producing a specific background image, calculating the actual width represented by the unit pixel of the bottom edge under the specific background image → producing a vehicle target image containing only a single vehicle image and calculating the corresponding width of the vehicle Pixel point → adjust the size of the vehicle target image and embed the vehicle target image in the specific background image → repeat the steps from the second to the third step above to make a vehicle target image database containing the specific background image → use the deep learning neural network to pair the prepared A database of vehicle target images containing specific background images for validation.
图1所示实施例表明,本发明方法是独立采集特定背景图像与车辆目标图像,先采集制作特定背景图像,后制作只包含单一车辆图像的车辆目标图像,再将只包含单一车辆的车辆目标图像嵌入到特定背景图像中形成包含特定背景图像的车辆目标图像,制作包含特定背景图像的车辆目标图像数据库,用深度学习神经网络对制备的包含特定背景图像的车辆目标图像数据库进行验证,制备出满足深度学习神经网络对图像数据库的需求并使用深度学习神经网络进行验证的包含特定背景图像的车辆目标图像数据库。The embodiment shown in FIG. 1 shows that the method of the present invention collects a specific background image and a vehicle target image independently, first collects and produces a specific background image, and then produces a vehicle target image containing only a single vehicle image, and then generates a vehicle target image containing only a single vehicle. The image is embedded in a specific background image to form a vehicle target image containing a specific background image, a vehicle target image database containing a specific background image is produced, and a deep learning neural network is used to verify the prepared vehicle target image database containing the specific background image. A vehicle target image database containing specific background images that meets the needs of deep learning neural networks for image databases and is validated using deep learning neural networks.
图2为本发明实施例中所采集的特定背景图像的示意图,该图的实样为实景的彩色照片或经过灰度变换提取边沿的效果图。该图图像中含高速路路边树木201、高速水泥防撞墩202、车道分界实线203、高速行车车道(I)204、车道分界虚线205、高速行车车道(II)206、高速隔离带及树木207。本图2为特定背景图像经过灰度变换提取边沿的效果图示意图,在此特定背景下制备四种车型车辆目标图像数据库,某一种车型制备有200种车辆目标图像。为了绘制方便,该特定背景图像已经调整成128×128像素,在本发明实施中,该图像中所包含的构成元素并不被限制。FIG. 2 is a schematic diagram of a specific background image collected in an embodiment of the present invention, and the real sample of the image is a color photo of a real scene or an effect image of an edge extracted by grayscale transformation. The image in this figure includes
图3为本发明实施例中所采集的不含背景图像的越野车目标图像的示意图,该图的实样为实景的彩色照片或经过灰度变换提取边沿的效果图。该图中,所示越野车宽度在1.9米,图中越野车图像中不包含任何背景图像。对于采集越野车目标图像包含的原有背景图像,利用图像处理软件,将其原有背景图像删除。只有不含原背景图像的单一越野车辆的目标图像,才能合成到上述图2特定背景图像中,否则原背景图像会与上述图2特定背景图像混合在一起。本图3为越野车车辆目标图像经过灰度变换提取边沿的效果图的示意图,车辆目标图像横向宽度已经调整为128像素。3 is a schematic diagram of an off-road vehicle target image without a background image collected in an embodiment of the present invention, and the real sample of the image is a color photo of a real scene or an effect image of edge extraction through grayscale transformation. In this image, the width of the off-road vehicle shown is 1.9 meters, and no background image is included in the image of the off-road vehicle. For the original background image included in the collected off-road vehicle target image, the original background image is deleted by using image processing software. Only the target image of a single off-road vehicle without the original background image can be synthesized into the above-mentioned specific background image in Figure 2, otherwise the original background image will be mixed with the above-mentioned specific background image in Figure 2. Fig. 3 is a schematic diagram of the effect diagram of the off-road vehicle target image after grayscale transformation to extract the edge, and the lateral width of the vehicle target image has been adjusted to 128 pixels.
图4为本发明实施例中所制备的含图2所示特定背景图像的越野车目标图像的示意图,该图的实样为实景的彩色照片或经过灰度变换提取边沿的效果图。该图以上述图2为特定背景图像,以上述图3所示越野车图像为车辆目标图像制备成的含图2特定背景图像的越野车目标图像,本图4是经过灰度变换提取边沿的效果图。图中,越野车目标图像占据在观察者的右面车道,上述图2的特定背景图像中部分被越野车图像取代,越野车的前轮着地轮胎在特定背景图像下底边的道路上,实现了图3的越野车车辆目标图像嵌入图2的特定背景图像中,制成包含特定背景图像的车辆目标图像。图4所示的越野车目标图像嵌入高速路背景图像中经过灰度变换提取边沿的越野车目标图像效果图的示意图401中,含高速路路边树木201、高速水泥防撞墩202、车道分界实线203、车道分界虚线205、高速行车车道(II)206、高速隔离带及树木207。4 is a schematic diagram of an off-road vehicle target image containing the specific background image shown in FIG. 2 prepared in an embodiment of the present invention, and the real sample of the image is a color photo of a real scene or an effect image of edge extraction through grayscale transformation. This figure takes the above-mentioned figure 2 as the specific background image, and uses the off-road vehicle image shown in the above-mentioned figure 3 as the vehicle target image to prepare the off-road vehicle target image containing the specific background image of Figure 2. This figure 4 is the edge extraction through grayscale transformation. renderings. In the figure, the target image of the off-road vehicle occupies the right lane of the observer. The specific background image in Figure 2 above is partially replaced by the off-road vehicle image. The off-road vehicle vehicle target image of FIG. 3 is embedded in the specific background image of FIG. 2 to form a vehicle target image including the specific background image. The off-road vehicle target image shown in FIG. 4 is embedded in the schematic diagram 401 of the off-road vehicle target image rendering of the edge extracted by grayscale transformation in the background image of the expressway, including the
图5为本发明实施例中所采集的不含背景图像的轿车目标图像的示意图,该图的实样为实景的彩色照片或经过灰度变换提取边沿的效果图。本发明将普通轿车和跑车形状都归为轿车车型,该图5中,所示轿车宽度在1.7米。图5中轿车图像中不包含任何背景图像。对于采集轿车目标图像包含的原有背景图像,利用图像处理软件,将其原有背景图像删除。本图5为不含背景的轿车车型目标图像经过灰度变换提取边沿的效果图的示意图中车辆目标图像的横向宽度已经调整为128像素。FIG. 5 is a schematic diagram of a car target image without a background image collected in an embodiment of the present invention, and the real sample of the image is a color photo of a real scene or an effect image of edge extraction through grayscale transformation. The present invention classifies the shapes of ordinary cars and sports cars as car models. In FIG. 5 , the width of the car shown is 1.7 meters. The car image in Figure 5 does not contain any background image. For the original background image contained in the collected car target image, the original background image is deleted by using image processing software. This FIG. 5 is a schematic diagram of the effect diagram of a target image of a sedan model without a background, and the edge is extracted by grayscale transformation. The horizontal width of the target image of the vehicle has been adjusted to 128 pixels.
图6为本发明实施例中所制备的含图2所示特定背景图像的轿车目标图像的示意图,该图的实样为实景的彩色照片或经过灰度变换提取边沿的效果图。该图以上述图2为特定背景图像,以上述图5所示轿车图像为车辆目标图像制备成的含图2特定背景图像的轿车目标图像,本图6是经过灰度变换提取边沿的效果图。本图6中,轿车图像占据在观察者的右面车道,上述图2的特定背景图像中部分被轿车图像取代,轿车的前轮着地轮胎在特定背景图像下底边的道路上,实现了图5的轿车车辆目标图像嵌入图2的特定背景图像中,制成包含特定背景图像的车辆目标图像。与越野车相比,轿车高度低,在制备上述图2特定背景图像下包含图5的轿车车辆目标图像中,轿车车辆目标图像在图2背景中区域小于越野车,遮挡了背景图像中扁平的区域。图6所示的轿车目标图像嵌入高速路背景图像中经过灰度变换提取边沿的轿车目标图像效果图601中,含高速路路边树木201、高速水泥防撞墩202、车道分界实线203、车道分界虚线205、高速行车车道(II)206、高速隔离带及树木207。6 is a schematic diagram of a car target image including the specific background image shown in FIG. 2 prepared in an embodiment of the present invention, and the real sample of the image is a color photo of a real scene or an effect image of edge extraction through grayscale transformation. This figure uses the above-mentioned figure 2 as the specific background image, and uses the car image shown in the above-mentioned figure 5 as the vehicle target image to prepare the car target image containing the specific background image of Figure 2. This figure 6 is the effect diagram of the edge extraction through grayscale transformation. . In this Figure 6, the car image occupies the right lane of the observer, the specific background image in Figure 2 above is partially replaced by the car image, and the front tires of the car are on the road at the bottom of the specific background image. The car vehicle target image of Fig. 2 is embedded in the specific background image of Fig. 2, and the vehicle target image containing the specific background image is made. Compared with the off-road vehicle, the height of the car is low. In the preparation of the target image of the car in Figure 5 including the specific background image in Figure 2, the target image of the car in the background of Figure 2 is smaller than the off-road vehicle, obscuring the flat in the background image. area. The car target image shown in FIG. 6 is embedded in the background image of the expressway. The
图7为本发明实施例中所采集的不含背景图像的公交车目标图像的示意图。该图的实样为实景的彩色照片或经过灰度变换提取边沿的效果图。该图中,公交车宽度在2.5米。图7中公交车图像中不包含任何背景。对于采集公交车辆目标图像包含原有的背景图像,利用图像处理软件,将其原有背景图像删除。本图7为不含背景的公交车辆目标图像经过灰度变换提取边沿的效果图,车辆目标图像的横向宽度已经调整为128像素。FIG. 7 is a schematic diagram of a bus target image without a background image collected in an embodiment of the present invention. The real sample of the image is the color photo of the real scene or the effect image of the edge extracted by grayscale transformation. In this picture, the bus width is 2.5 meters. The bus image in Figure 7 does not contain any background. The target image of the collected public transport vehicle contains the original background image, and the original background image is deleted by using the image processing software. Fig. 7 is the effect diagram of extracting the edge of the bus vehicle target image without background through grayscale transformation, and the horizontal width of the vehicle target image has been adjusted to 128 pixels.
图8为本发明实施例中所制备的含图2所示特定背景图像的公交车目标图像的示意图。该图的实样为实景的彩色照片或经过灰度变换提取边沿的效果图。该图以上述图2为特定背景图像,以上述图7所示公交车图像为车辆目标图像制备成的含图2特定背景图像的公交车目标图像,本图8是经过灰度变换提取边沿的效果图。本图8中,公交车图像占据在观察者的右面车道,上述图2的特定背景图像中部分被公交车图像取代,公交车的前轮着地轮胎在特定背景图像下底边的道路上,实现了与图2特定背景图像下公交车图像,相比越野车和轿车,公交车体积庞大,在制备上述图2特定背景图像下包含公交车目标图像时,公交车目标图像在图2背景中区域大于越野车和轿车,遮挡原背景中景物最大,占据了大部分背景图像。图8所示的嵌入高速路背景图像中经过灰度变换提取边沿的公交车目标图像效果图801中,含高速路路边树木201、高速水泥防撞墩202、车道分界实线203、高速行车车道(II)206、高速隔离带及树木207。FIG. 8 is a schematic diagram of a bus target image including the specific background image shown in FIG. 2 prepared in an embodiment of the present invention. The real sample of the image is the color photo of the real scene or the effect image of the edge extracted by grayscale transformation. This figure uses the above-mentioned figure 2 as the specific background image, and uses the bus image shown in the above-mentioned figure 7 as the vehicle target image to prepare a bus target image containing the specific background image of figure 2. This figure 8 is the edge extracted by grayscale transformation. renderings. In this Figure 8, the bus image occupies the right lane of the observer. The specific background image in Figure 2 above is partially replaced by the bus image. The front tires of the bus are on the road at the bottom of the specific background image. In order to compare the bus image with the specific background image in Figure 2, the bus is bulky compared to off-road vehicles and cars. When the target image of the bus is included in the specific background image in Figure 2, the target image of the bus is in the background area of Figure 2. Larger than off-road vehicles and sedans, the occluded scene in the original background is the largest, occupying most of the background image. Figure 8 shows the effect of the bus target image embedded in the background image of the expressway after grayscale transformation and extracting the edge. Lane (II) 206, high-speed barrier and
图9为本发明实施例中所采集的不含背景图像的面包车目标图像的示意图。该图的实样为实景的彩色照片或经过灰度变换提取边沿的效果图。该图中,面包车宽度在1.5米。对于采集面包车辆目标图像包含原有的背景图像,利用图像处理软件,将其原有背景图像删除。本图9为不含背景的面包车辆目标图像经过灰度变换提取边沿的效果图,车辆目标图像的横向宽度已经调整为128像素。FIG. 9 is a schematic diagram of a van target image without a background image collected in an embodiment of the present invention. The real sample of the image is the color photo of the real scene or the effect image of the edge extracted by grayscale transformation. In this picture, the width of the van is 1.5 meters. For the target image of the bread vehicle that contains the original background image, the original background image is deleted by using the image processing software. Fig. 9 is the effect diagram of the bread vehicle target image without background to extract the edge after grayscale transformation, and the lateral width of the vehicle target image has been adjusted to 128 pixels.
图10为本发明实施例中所制备的含图2所示特定背景图像下面包车目标图像的示意图。该图的实样为实景的彩色照片或经过灰度变换提取边沿的效果图。该图以上述图2为特定背景图像,以上述图9所示面包车图像为车辆目标图像制备成的含图2特定背景图像的面包车目标图像,本图10是经过灰度变换提取边沿的效果图。本图10中,面包车图像占据在观察者的右面车道,上述图2的特定背景图像中部分被面包车图像取代,面包车的前轮着地轮胎在特定背景图像下底边的道路上,实现了与图2特定背景图像下面包车图像,相比越野车、轿车和公交车,面包车最窄,在制图2特定背景图像下包含面包车目标图像,在图2背景中狭长区域,遮挡背景的景物较少。图10所示的面包车目标图像嵌入高速路背景图像中经过灰度变换提取边沿的面包车目标图像效果图1001中,含高速路路边树木201、高速水泥防撞墩202、车道分界实线203、车道分界虚线205、高速行车车道(II)206、高速隔离带及树木207。FIG. 10 is a schematic diagram of a target image of a van under the specific background image shown in FIG. 2 prepared in an embodiment of the present invention. The real sample of the image is the color photo of the real scene or the effect image of the edge extracted by grayscale transformation. This figure uses the above-mentioned figure 2 as the specific background image and the van image shown in the above-mentioned figure 9 as the vehicle target image, which is a target image of the van containing the specific background image of Figure 2 prepared. This figure 10 is the effect diagram of extracting the edge after grayscale transformation. . In this Figure 10, the van image occupies the right lane of the observer. The specific background image in Figure 2 above is partially replaced by the van image. The front tires of the van are on the bottom side of the road under the specific background image. 2 The van image under the specific background image, compared with off-road vehicles, cars and buses, the van is the narrowest, and the van target image is included in the specific background image of Figure 2. In the narrow and long area in the background of Figure 2, there are fewer scenes blocking the background. The van target image shown in Fig. 10 is embedded in the background image of the expressway and the effect of the van target image with the edges extracted by grayscale transformation. Lane demarcation dotted
图11为本发明实施例中深度学习神经网络训练和测试所制备的包含特定背景图像的车辆目标图像数据库的准确率曲线。由图11所示实施例可见,本发明将200张图像组成每一类,由此制备组成包含图2所示的特定背景图像下的越野车、轿车、公交车和面包车四类车型的车辆目标图像数据库。已经制备的包含特定背景图像的车辆目标图像数据库,在尺寸被变换到32×32像素后,用于典型深度学习神经网络LeNet-5,其中某一类型车辆有200张图像,选择其中140张用于训练深度网络,另外60张用于测试,深度学习神经网络LeNet-5学习率系数为2,每次训练采用20张图像样品,在训练150次后训练集和测试集的识别正确率都超过了95%,能够实现对深度学习神经网络结构的训练。图11中,曲线1101为训练集为四类车辆每类140张车辆目标图像的深度学习神经网络识别率,曲线1102为测试集为四类车辆每类60张车辆目标图像的深度学习神经网络识别率。FIG. 11 is an accuracy curve of a vehicle target image database including a specific background image prepared by deep learning neural network training and testing in an embodiment of the present invention. It can be seen from the embodiment shown in FIG. 11 that the present invention composes 200 images into each category, thereby preparing vehicle objects that include four types of vehicle types including off-road vehicles, cars, buses and vans under the specific background image shown in FIG. 2 . Image database. The prepared vehicle target image database containing specific background images is used for the typical deep learning neural network LeNet-5 after the size is transformed to 32 × 32 pixels. There are 200 images of a certain type of vehicle, and 140 of them are selected for use. For training the deep network, the other 60 images are used for testing. The learning rate coefficient of the deep learning neural network LeNet-5 is 2. Each training uses 20 image samples. After 150 times of training, the recognition accuracy of the training set and the test set exceeds 95%, can realize the training of deep learning neural network structure. In Fig. 11,
实施例1Example 1
本实施例中所采集制作的车辆目标图像的车辆的车型包括越野车、轿车、公交车和面包车。The vehicle types of the vehicle target image collected and produced in this embodiment include off-road vehicles, cars, buses, and vans.
本实施例的包含特定背景图像的车辆目标图像数据库建立方法,具体步骤如下:The method for establishing a vehicle target image database including a specific background image of the present embodiment includes the following specific steps:
第一步,采集制作特定背景图像:The first step is to collect and make a specific background image:
通过拍照的方法或网络下载方法,采集制作特定背景图像,所采集制作特定背景图像要求如下:Collect and make a specific background image by taking a photo or downloading from the network. The requirements for collecting and making a specific background image are as follows:
(1.1)特定背景图像中所包含的图像内容:(1.1) Image content contained in a specific background image:
采集特定背景图像中所包含的图像内容为:The image content included in the acquisition of a specific background image is:
特定背景图像中所包含的图像内容为,车道图像加树木图像、建筑物图像、山脉图像和路标图像中的1~4种;The image content contained in the specific background image is one to four of the lane image plus tree image, building image, mountain image and road sign image;
本实施例中,如附图2所示,特定背景图像中所包含的图像内容中,包含高速路路边树木201、高速水泥防撞墩202、车道分界实线203、高速行车车道(I)204、车道分界虚线205、高速行车车道(II)206、高速隔离带及树木207;In this embodiment, as shown in FIG. 2 , the image content included in the specific background image includes
越野车:通过拍照的方法采集制作的特定背景图像,如附图4所示,特定背景图像中所包含的图像内容中,包含高速路路边树木201、高速水泥防撞墩202、车道分界实线203、车道分界虚线205、高速行车车道(II)206、高速隔离带及树木207;Off-road vehicle: a specific background image is collected and produced by taking a photo. As shown in Figure 4, the image content contained in the specific background image includes
轿车:通过拍照的方法采集制作的特定背景图像,如附图6所示,特定背景图像中所包含的图像内容中,包含高速路路边树木201、高速水泥防撞墩202、车道分界实线203、车道分界虚线205、高速行车车道(II)206、高速隔离带及树木207;Car: A specific background image is collected and produced by taking a photo. As shown in Figure 6, the image content contained in the specific background image includes
公交车:通过拍照的方法采集制作的特定背景图像,如附图8所示,特定背景图像中所包含的图像内容中,包含高速路路边树木201、高速水泥防撞墩202、车道分界实线203、高速行车车道(II)206、高速隔离带及树木207;Bus: A specific background image is collected and produced by taking a photo. As shown in Figure 8, the image content contained in the specific background image includes
面包车:通过拍照的方法采集制作的特定背景图像,如附图10所示,特定背景图像中所包含的图像内容中,包含高速路路边树木201、高速水泥防撞墩202、车道分界实线203、车道分界虚线205、高速行车车道(II)206、高速隔离带及树木207;Van: A specific background image is collected and produced by taking a photo. As shown in Figure 10, the image content contained in the specific background image includes
(1.2)特定背景图像的像素点大小:(1.2) Pixel size of a specific background image:
特定背景图像像素点大小为N像素×M像素,即纵向为N像素,横向为M像素,特定背景图像像素点≥被背景图像所包含的待制备的车辆目标图像像素点;The pixel size of the specific background image is N pixels×M pixels, that is, N pixels in the vertical direction and M pixels in the horizontal direction, and the specific background image pixels ≥ the vehicle target image pixels to be prepared contained in the background image;
本实施例中的特定背景图像像素点大小为N×M=128像素×128像素,即纵向为N=128像素,横向为M=128像素,特定背景图像像素点≥被背景图像所包含的待制备的车辆目标图像像素点;The pixel size of the specific background image in this embodiment is N×M=128 pixels×128 pixels, that is, N=128 pixels in the vertical direction and M=128 pixels in the horizontal direction. Prepared vehicle target image pixel points;
(1.3)计算特定背景图像下底边单位像素表示的实际宽度:(1.3) Calculate the actual width represented by the unit pixel of the bottom edge under a specific background image:
设定标准车道的宽度为L米,根据特定背景图像下底边中车道所占有I像素,用如下公式(1)计算出特定背景图像的下底边单位像素表示的实际宽度R,The width of the standard lane is set to be L meters. According to the 1 pixel occupied by the lane in the bottom edge of the specific background image, the actual width R represented by the unit pixel of the bottom edge of the specific background image is calculated by the following formula (1).

上述公式(1)中,R的单位为米/像素;In the above formula (1), the unit of R is m/pixel;
本实施例中,In this embodiment,
越野车、轿车、公交车和面包车相同:设定标准车道的宽度为L=3.75米,根据特定背景图像下底边中车道所占有I=128像素,代入L=3.75米和I=128像素,得到R=0.029297(米/像素);Off-road vehicles, cars, buses and vans are the same: set the width of the standard lane as L=3.75 meters, according to the specific background image under the bottom edge of the lane occupied by I=128 pixels, substitute L=3.75 meters and I=128 pixels, get R = 0.029297 (m/pixel);
第二步,制作只包含单一车辆图像的车辆目标图像:The second step is to make a vehicle target image that contains only a single vehicle image:
通过拍照或网络下载方法,采集并制作只包含单一车辆图像的车辆目标图像,该只包含单一车辆图像的车辆目标图像的要求如下:Collect and produce a vehicle target image containing only a single vehicle image by taking a photo or downloading from the network. The requirements for the vehicle target image containing only a single vehicle image are as follows:
(2.1)采集单一目标车辆的正面图像;(2.1) Collect the frontal image of a single target vehicle;
(2.2)按照所采集制作车辆目标图像的车辆的大小及形状,分成不同车型,本实施例中包括越野车、轿车、公交车和面包车;(2.2) According to the collected size and shape of the vehicle for making the vehicle target image, it is divided into different models, including off-road vehicles, cars, buses and vans in this embodiment;
(2.3)当拍照或网络下载的车辆目标图像中包含相应的原始背景图像时,通过图像处理软件将该原始背景图像删除,这样在采集和变换的车辆目标图像中只包含单一目标车辆图像,该车辆目标图像中的车辆宽度为J像素,采集车辆目标图像中的车辆宽度像素J要大于0.9倍的特定背景图像下底边中车道所占有I像素;(2.3) When the corresponding original background image is included in the vehicle target image captured or downloaded from the network, the original background image is deleted by the image processing software, so that the collected and transformed vehicle target image only contains a single target vehicle image. The vehicle width in the vehicle target image is J pixels, and the vehicle width pixel J in the collected vehicle target image is greater than 0.9 times the specific background image, and the lane in the bottom edge occupies I pixels;
本实施例中,In this embodiment,
越野车:包含单一越野车车辆图像的车辆目标图像如附图3所示,该图的实样为实景的彩色照片或经过灰度变换提取边沿的效果图,该越野车车辆目标图像中的车辆宽度为J=128像素,满足J大于0.9倍的特定背景图像下底边中车道所占有I=128像素的要求;Off-road vehicle: The vehicle target image containing a single off-road vehicle vehicle image is shown in Figure 3. The real image of the image is a color photo of the real scene or an effect image of the edge extracted by grayscale transformation. The vehicle in the off-road vehicle vehicle target image The width is J=128 pixels, which meets the requirement of I=128 pixels occupied by the lane in the bottom edge of the specific background image with J greater than 0.9 times;
轿车:包含单一轿车车辆图像的车辆目标图像如附图5所示,该图的实样为实景的彩色照片或经过灰度变换提取边沿的效果图,该轿车车辆目标图像中的车辆宽度为J=128像素,满足J大于0.9倍的特定背景图像下底边中车道所占有I=128像素的要求;Car: The vehicle target image containing a single car vehicle image is shown in Figure 5. The real image of the image is a color photo of the real scene or an effect image of the edge extracted by grayscale transformation. The vehicle width in the car vehicle target image is J = 128 pixels, meeting the requirement of I = 128 pixels occupied by the lane in the bottom edge of the specific background image with J greater than 0.9 times;
公交车:包含单一公交车车辆图像的车辆目标图像如附图7所示,该图的实样为实景的彩色照片或经过灰度变换提取边沿的效果图,该公交车车辆目标图像中的车辆宽度为J=128像素,满足J大于0.9倍的特定背景图像下底边中车道所占有I=128像素的要求;Bus: The vehicle target image containing a single bus vehicle image is shown in Figure 7. The real image of the image is a color photo of the real scene or the effect image of the edge extracted through grayscale transformation. The vehicle in the bus vehicle target image The width is J=128 pixels, which meets the requirement of I=128 pixels occupied by the lane in the bottom edge of the specific background image with J greater than 0.9 times;
面包车:包含单一面包车车辆图像的车辆目标图像如附图9所示,该图的实样为实景的彩色照片或经过灰度变换提取边沿的效果图,该面包车车辆目标图像中的车辆宽度为J=128像素,满足J大于0.9倍的特定背景图像下底边中车道所占有I=128像素的要求;Van: The vehicle target image containing a single van vehicle image is shown in Figure 9. The real image of the image is a color photo of the real scene or an effect image of the edge extracted by grayscale transformation. The vehicle width in the van vehicle target image is J = 128 pixels, meeting the requirement of I = 128 pixels occupied by the lane in the bottom edge of the specific background image with J greater than 0.9 times;
(2.4)计算车辆宽度对应的像素点:(2.4) Calculate the pixels corresponding to the width of the vehicle:
根据上述(2.2)步中所述的不同车型,测定其宽度为W米,用如下公式(2)计算相应该车型横向对应上述第一步采集制作的特定背景图像的像素D,According to the different vehicle models described in the above step (2.2), the width is determined to be W meters, and the following formula (2) is used to calculate the corresponding pixel D of the vehicle horizontally corresponding to the specific background image collected and produced in the first step above,

公式(2)中,fix()表示取整;In formula (2), fix() means rounding;
本实施例中,In this embodiment,
越野车:代入越野车宽度W=1.9米和R=0.029297(米/像素),得到D=65像素,越野车横向对应图2特定背景图像中下底边占有D=65像素;Off-road vehicle: Substitute the width of the off-road vehicle W=1.9m and R=0.029297 (m/pixel) to obtain D=65 pixels, the horizontal direction of the off-road vehicle corresponds to the lower bottom edge of the specific background image in Figure 2 occupying D=65 pixels;
轿车:代入轿车宽度W=1.7米和R=0.029297(米/像素),得到D=58像素,轿车横向对应图2特定背景图像中下底边占有D=58像素;Car: Substitute the car width W = 1.7 m and R = 0.029297 (m/pixel) to obtain D = 58 pixels, and the horizontal direction of the car corresponds to the lower bottom edge of the specific background image in Figure 2 occupied D = 58 pixels;
公交车:代入公交车宽度W=2.5米和R=0.029297(米/像素),得到D=85像素,公交车横向对应图2特定背景图像中下底边占有D=85像素;Bus: Substitute the width of the bus W=2.5m and R=0.029297 (m/pixel) to get D=85 pixels, the horizontal direction of the bus corresponds to the lower bottom edge of the specific background image in Figure 2 occupies D=85 pixels;
面包车:代入面包车宽度W=1.5米和R=0.029297(米/像素),得到D=51像素,面包横向对应图2特定背景图像中下底边占有D=51像素;Van: Substitute the width of the van W=1.5m and R=0.029297 (m/pixel) to obtain D=51 pixels, and the breadth horizontal direction corresponds to the lower and bottom edges of the specific background image in Figure 2 occupying D=51 pixels;
第三步,将车辆目标图像嵌入特定背景图像中:The third step is to embed the vehicle target image into a specific background image:
将上述第二步制作的只包含单一越野车车辆图像的车辆目标图像嵌入上述第一步采集制作的特定背景图像中,具体操作方法如下:Embed the vehicle target image that only contains a single off-road vehicle image produced in the second step above into the specific background image collected and produced in the first step above. The specific operation method is as follows:
(3.1)调整车辆目标图像的大小:(3.1) Adjust the size of the vehicle target image:
用如下公式(3)分别计算上述第二步制作的只包含单一越野车车辆图像的车辆目标图像横向和纵向的调整系数E,即单一越野车车辆目标图像横向和纵向分别调整为E倍The following formula (3) is used to calculate the horizontal and vertical adjustment coefficients E of the vehicle target image that only contains a single off-road vehicle image produced in the second step above, that is, the horizontal and vertical direction of the single off-road vehicle target image are adjusted to E times respectively.

依据调整系数E的数值来调整车辆目标图像的大小,调整大小后的车辆目标图像用于下一步的车辆目标图像嵌入特定背景图像中;The size of the vehicle target image is adjusted according to the value of the adjustment coefficient E, and the resized vehicle target image is used to embed the vehicle target image in the next step into a specific background image;
本实施例中,In this embodiment,
越野车:D=65像素,J=128像素,E=0.5078,E<1,缩小上述第二步制作的只包含单一越野车车辆图像的车辆目标图像,即将附图2横向和纵向分别作相应大小调整为原图像的0.5078倍,缩小采集的越野车目标图像的大小,将调整大小后的车辆目标图像用于下一步的车辆目标图像嵌入特定背景图像中;Off-road vehicle: D=65 pixels, J=128 pixels, E=0.5078, E<1, reduce the vehicle target image that only contains a single off-road vehicle image produced in the second step above, that is, the horizontal and vertical directions of Figure 2 are respectively corresponding The size is adjusted to 0.5078 times of the original image, the size of the collected off-road vehicle target image is reduced, and the resized vehicle target image is used for the next vehicle target image to be embedded in a specific background image;
轿车:D=58像素,J=128像素,E=0.4531,E<1,缩小上述第二步制作的只包含单一越野车车辆图像的车辆目标图像,即将附图2横向和纵向分别作相应大小调整为原图像的0.4531倍,缩小采集的越野车目标图像的大小,将调整大小后的车辆目标图像用于下一步的车辆目标图像嵌入特定背景图像中;Car: D = 58 pixels, J = 128 pixels, E = 0.4531, E < 1, reduce the vehicle target image that only contains a single off-road vehicle image produced in the second step above, that is, the horizontal and vertical dimensions of Figure 2 are respectively corresponding Adjust to 0.4531 times of the original image, reduce the size of the collected off-road vehicle target image, and use the resized vehicle target image for the next vehicle target image to embed in a specific background image;
公交车:D=85像素,J=128像素,E=0.6641,E<1,缩小上述第二步制作的只包含单一越野车车辆图像的车辆目标图像,即将附图2横向和纵向分别作相应大小调整为原图像的0.6641倍,缩小采集的越野车目标图像的大小,将调整大小后的车辆目标图像用于下一步的车辆目标图像嵌入特定背景图像中;Bus: D = 85 pixels, J = 128 pixels, E = 0.6641, E < 1, reduce the vehicle target image that only contains a single off-road vehicle image produced in the second step above, that is, the horizontal and vertical directions in Figure 2 are corresponding The size is adjusted to 0.6641 times of the original image, the size of the collected off-road vehicle target image is reduced, and the resized vehicle target image is used for the next vehicle target image to be embedded in a specific background image;
面包车:D=51像素,J=128像素,E=0.3984,E<1,缩小上述第二步制作的只包含单一越野车车辆图像的车辆目标图像,即将附图2横向和纵向分别作相应大小调整为原图像的0.3984倍,缩小采集的越野车目标图像的大小,将调整大小后的车辆目标图像用于下一步的车辆目标图像嵌入特定背景图像中;Van: D = 51 pixels, J = 128 pixels, E = 0.3984, E < 1, reduce the vehicle target image that only contains a single off-road vehicle image produced in the second step above, that is, the horizontal and vertical dimensions of Figure 2 are respectively corresponding. Adjust to 0.3984 times of the original image, reduce the size of the collected off-road vehicle target image, and use the resized vehicle target image for the next vehicle target image to embed in a specific background image;
(3.2)将只包含单一车辆图像的车辆目标图像嵌入采集制作的特定背景图像中:(3.2) Embed a vehicle target image containing only a single vehicle image into a specific background image produced by acquisition:
在上述第一步采集制作的特定背景图像中显示的车道图像中心位置附近,嵌入上述(3.1)步已经调整大小的车辆目标图像,该车辆目标图像放置在上述第一步采集制作的特定背景图像下底边以上的位置,该车辆目标图像前轮着地,轮胎占据在上述第一步采集制作的特定背景图像中的车道位置,该车辆目标图像是不透明的;In the vicinity of the center position of the lane image displayed in the specific background image collected and produced in the first step above, the vehicle target image that has been resized in the above step (3.1) is embedded, and the vehicle target image is placed in the specific background image collected and produced in the first step above. The position above the bottom edge, the front wheel of the vehicle target image is on the ground, the tire occupies the lane position in the specific background image collected and produced in the first step above, and the vehicle target image is opaque;
(3.3)依据上述第一步采集制作的附图2所示的特定背景图像中车道的大小确定该特定背景图像宽度像素表示的实际宽度,结合目标车辆宽度确定该车辆目标图像占据特定背景图像中横向像素的数量;(3.3) Determine the actual width represented by the width of the specific background image based on the size of the lane in the specific background image shown in FIG. 2 collected and produced in the first step above, and determine that the target image of the vehicle occupies the specific background image in combination with the width of the target vehicle. the number of horizontal pixels;
(3.4)调整只包含单一越野车车辆图像的车辆目标图像像素点的数量,要保持该车辆目标图像的横向与纵向同样比例变化,只改变该车辆目标图像的大小,车辆形状保持不变;(3.4) To adjust the number of pixel points of the vehicle target image that only contains a single off-road vehicle image, keep the horizontal and vertical changes of the vehicle target image in the same proportion, only change the size of the vehicle target image, and the vehicle shape remains unchanged;
由此制成包含特定背景图像的单一车辆图像的车辆目标图像;Thereby, a vehicle object image containing a single vehicle image of a specific background image is produced;
本实施例中,In this embodiment,
越野车:由此制成包含特定背景图像的越野车车辆目标图像如附图4所示,该图以上述图2为特定背景图像,以上述图3所示越野车图像为车辆目标图像制备成的含图2特定背景图像的越野车目标图像,本图4是经过灰度变换提取边沿的效果图。图中,越野车目标图像占据在观察者的右面车道,上述图2的特定背景图像中部分被越野车图像取代,越野车的前轮着地轮胎在特定背景图像下底边的道路上,实现了图3的越野车车辆目标图像嵌入图2的特定背景图像中,制成包含特定背景图像的车辆目标图像。图4所示的越野车目标图像嵌入高速路背景图像中经过灰度变换提取边沿的越野车目标图像效果图401中,含高速路路边树木201、高速水泥防撞墩202、车道分界实线203、车道分界虚线205、高速行车车道(II)206、高速隔离带及树木207;Off-road vehicle: The off-road vehicle vehicle target image containing a specific background image is thus made as shown in Figure 4, which is prepared by taking the above-mentioned Figure 2 as the specific background image and the off-road vehicle image shown in the above-mentioned Figure 3 as the vehicle target image. The off-road vehicle target image containing the specific background image in Figure 2, this Figure 4 is the effect diagram of extracting the edge through grayscale transformation. In the figure, the target image of the off-road vehicle occupies the right lane of the observer. The specific background image in Figure 2 above is partially replaced by the off-road vehicle image. The off-road vehicle vehicle target image of FIG. 3 is embedded in the specific background image of FIG. 2 to form a vehicle target image including the specific background image. The off-road vehicle target image shown in Fig. 4 is embedded in the background image of the expressway and the effect of the off-road vehicle target image after grayscale transformation to extract the edge. 203. Lane boundary dotted
轿车:由此制成包含特定背景图像的轿车车辆目标图像如附图6所示,该图以上述图2为特定背景图像,以上述图5所示轿车图像为车辆目标图像制备成的含图2特定背景图像的轿车目标图像,本图6是经过灰度变换提取边沿的效果图。本图6中,轿车图像占据在观察者的右面车道,上述图2的特定背景图像中部分被轿车图像取代,轿车的前轮着地轮胎在特定背景图像下底边的道路上,实现了图5的轿车车辆目标图像嵌入图2的特定背景图像中,制成包含特定背景图像的车辆目标图像。与越野车相比,轿车高度低,在制备上述图2特定背景图像下包含图5的轿车车辆目标图像中,轿车车辆目标图像在图2背景中区域小于越野车,遮挡了背景图像中扁平的区域。图6所示的轿车目标图像嵌入高速路背景图像中经过灰度变换提取边沿的轿车目标图像效果图601中,含高速路路边树木201、高速水泥防撞墩202、车道分界实线203、车道分界虚线205、高速行车车道(II)206、高速隔离带及树木207;Car: A car vehicle target image containing a specific background image is produced as shown in FIG. 6 , which is prepared by taking the above-mentioned FIG. 2 as the specific background image and the car image shown in the above-mentioned FIG. 5 as the vehicle target image. 2. The target image of the car with a specific background image, this Figure 6 is the rendering of the edge extracted through grayscale transformation. In this Figure 6, the car image occupies the right lane of the observer, the specific background image in Figure 2 above is partially replaced by the car image, and the front tires of the car are on the road at the bottom of the specific background image. The car vehicle target image of Fig. 2 is embedded in the specific background image of Fig. 2, and the vehicle target image containing the specific background image is made. Compared with the off-road vehicle, the height of the car is low. In the preparation of the target image of the car in Figure 5 including the specific background image in Figure 2, the target image of the car in the background of Figure 2 is smaller than the off-road vehicle, obscuring the flat in the background image. area. The car target image shown in FIG. 6 is embedded in the background image of the expressway. The
公交车:由此制成包含特定背景图像的公交车车辆目标图像如附图8所示,该图以上述图2为特定背景图像,以上述图7所示公交车图像为车辆目标图像制备成的含图2特定背景图像的公交车目标图像,本图8是经过灰度变换提取边沿的效果图。本图8中,公交车图像占据在观察者的右面车道,上述图2的特定背景图像中部分被公交车图像取代,公交车的前轮着地轮胎在特定背景图像下底边的道路上,实现了与图2特定背景图像下公交车图像,相比越野车和轿车,公交车体积庞大,在制备上述图2特定背景图像下包含公交车目标图像时,公交车目标图像在图2背景中区域大于越野车和轿车,遮挡原背景中景物最大,占据了大部分背景图像。图8所示的嵌入高速路背景图像中经过灰度变换提取边沿的公交车目标图像效果图801中,含高速路路边树木201、高速水泥防撞墩202、车道分界实线203、高速行车车道(II)206、高速隔离带及树木207;Bus: A bus vehicle target image containing a specific background image is produced as shown in Figure 8, which is prepared by taking the above Figure 2 as the specific background image and the bus image shown in Figure 7 above as the vehicle target image. The bus target image containing the specific background image in Figure 2, this Figure 8 is the effect diagram of extracting the edge through grayscale transformation. In this Figure 8, the bus image occupies the right lane of the observer. The specific background image in Figure 2 above is partially replaced by the bus image. The front tires of the bus are on the road at the bottom of the specific background image. In order to compare the bus image with the specific background image in Figure 2, the bus is bulky compared to off-road vehicles and cars. When the target image of the bus is included in the specific background image in Figure 2, the target image of the bus is in the background area of Figure 2. Larger than off-road vehicles and sedans, the occluded scene in the original background is the largest, occupying most of the background image. Figure 8 shows the effect of the bus target image embedded in the background image of the expressway after grayscale transformation and extracting the edge. Lane (II) 206, high-speed isolation belt and
面包车;由此制成包含特定背景图像的面包车车辆目标图像如附图10所示,该图以上述图2为特定背景图像,以上述图9所示面包车图像为车辆目标图像制备成的含图2特定背景图像的面包车目标图像,本图10是经过灰度变换提取边沿的效果图。本图10中,面包车图像占据在观察者的右面车道,上述图2的特定背景图像中部分被面包车图像取代,面包车的前轮着地轮胎在特定背景图像下底边的道路上,实现了与图2特定背景图像下面包车图像,相比越野车、轿车和公交车,面包车最窄,在制图2特定背景图像下包含面包车目标图像,在图2背景中狭长区域,遮挡背景的景物较少。图10所示的面包车目标图像嵌入高速路背景图像中经过灰度变换提取边沿的面包车目标图像效果图1001中,含高速路路边树木201、高速水泥防撞墩202、车道分界实线203、车道分界虚线205、高速行车车道(II)206、高速隔离带及树木207;A van; a target image of a van vehicle containing a specific background image is thus made as shown in FIG. 10 , which is prepared with the above-mentioned FIG. 2 as the specific background image and the van image shown in the above-mentioned FIG. 9 as the vehicle target image. 2. The van target image of a specific background image, this Figure 10 is the rendering of the edge extracted through grayscale transformation. In this Figure 10, the van image occupies the right lane of the observer. The specific background image in Figure 2 above is partially replaced by the van image. The front tires of the van are on the bottom side of the road under the specific background image. 2 The van image under the specific background image, compared with off-road vehicles, cars and buses, the van is the narrowest, and the van target image is included in the specific background image of Figure 2. In the narrow and long area in the background of Figure 2, there are fewer scenes blocking the background. The van target image shown in Fig. 10 is embedded in the background image of the expressway and the effect of the van target image with the edges extracted by grayscale transformation. Lane boundary dotted
第四步,制作包含特定背景图像的车辆目标图像数据库:The fourth step is to make a vehicle target image database containing a specific background image:
重复上述第二步至第三步的步骤,对于所有的不同车型均制备包含特定背景图像的单一车辆图像的车辆目标图像数据库,制备的不同车型的包含特定背景图像的单一车辆图像的车辆目标图像均≥100张,由此完成制作包含特定背景图像的车辆目标图像数据库,以满足深度学习神经网络对图像数据库的需求;Repeat the steps from the second step to the third step above, prepare a vehicle target image database containing a single vehicle image of a specific background image for all different vehicle models, and prepare a vehicle target image of a single vehicle image containing a specific background image for different vehicle models All ≥100 images, thus completing the production of a vehicle target image database containing specific background images to meet the needs of deep learning neural networks for image databases;
本实施例中的不同车型为越野车、轿车、公交车、面包车;Different car models in this embodiment are off-road vehicles, cars, buses, and vans;
第五步,用深度学习神经网络对制备的包含特定背景图像的车辆目标图像数据库进行验证:The fifth step is to use a deep learning neural network to verify the prepared vehicle target image database containing a specific background image:
对上述第四步制作的包含特定背景图像的越野车、轿车、公交车、面包车的单一车辆图像的车辆目标图像数据库,进一步变换包含特定背景图像的车辆目标图像的大小,作为深度学习神经网络输入,验证深度学习神经网络对制备可变背景车辆目标图像数据库的识别能力;For the vehicle target image database of a single vehicle image of off-road vehicles, cars, buses, and vans with a specific background image produced in the fourth step above, the size of the vehicle target image containing the specific background image is further transformed as the input of the deep learning neural network. , to verify the recognition ability of deep learning neural network for preparing variable background vehicle target image database;
本实施例中,由图11所示,本实施例将200张图像组成每一类,由此制备组成包含图2所示的特定背景图像下的越野车、轿车、公交车和面包车四类车型的车辆目标图像数据库。已经制备的包含特定背景图像的车辆目标图像数据库,在尺寸被变换到32×32像素后,用于典型深度学习神经网络LeNet-5,其中某一类型车辆有200张图像,选择其中140张用于训练深度网络,另外60张用于测试,深度学习神经网络LeNet-5学习率系数为2,每次训练采用20张图像样品,在训练150次后训练集和测试集的识别正确率都超过了95%,能够实现对深度学习神经网络结构的训练。图11中,曲线1101为训练集为四类车辆每类140张车辆目标图像的深度学习神经网络识别率,曲线1102为测试集为四类车辆每类60张车辆目标图像的深度学习神经网络识别率。In this embodiment, as shown in FIG. 11 , in this embodiment, 200 images are formed into each category, thereby preparing four types of vehicle models including off-road vehicles, cars, buses and vans under the specific background image shown in FIG. 2 vehicle target image database. The prepared vehicle target image database containing specific background images is used for the typical deep learning neural network LeNet-5 after the size is transformed to 32 × 32 pixels. There are 200 images of a certain type of vehicle, and 140 of them are selected for use. For training the deep network, the other 60 images are used for testing. The learning rate coefficient of the deep learning neural network LeNet-5 is 2. Each training uses 20 image samples. After 150 times of training, the recognition accuracy of the training set and the test set exceeds 95%, can realize the training of deep learning neural network structure. In Fig. 11,
至此,完成包含特定背景图像的车辆目标图像数据库建立。So far, the establishment of the vehicle target image database containing the specific background image is completed.
表1.车道及四种类型车辆典型宽度及对应制备图像中占据像素和调整系数Table 1. Typical widths of lanes and four types of vehicles and their occupied pixels and adjustment coefficients in the corresponding prepared images

实施例2Example 2
除特定背景图像中所包含的图像内容为车道图像加路标图像之外,其他同实施例1。实施例3Except that the image content included in the specific background image is a lane image and a road sign image, the others are the same as in Embodiment 1. Example 3
除特定背景图像中所包含的图像内容为车道图像加路标图像和建筑物图之外,其他同实施例1。Except that the image content contained in the specific background image is a lane image plus a road sign image and a building image, the others are the same as in Embodiment 1.
实施例4Example 4
除特定背景图像中所包含的图像内容为车道图像加树木图像、建筑物图像、山脉图像和路标图像之外,其他同实施例1。Except that the image content included in the specific background image is a lane image plus a tree image, a building image, a mountain image, and a road sign image, the others are the same as in Embodiment 1.
上述实施例中,所述通过图像处理软件将采集车辆目标背景图像删除,这里所用的图像处理软件是Windows中自带的绘图软件;所述深度学习神经网络是深度学习神经网络LeNet-5;所涉及的操作方法是本技术领域所公知的。In the above embodiment, the background image of the collected vehicle target is deleted by the image processing software, and the image processing software used here is the drawing software that comes with Windows; the deep learning neural network is the deep learning neural network LeNet-5; The methods of operation involved are well known in the art.
Claims (4)
Translated fromChinese


Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910278860.4ACN110008360B (en) | 2019-04-09 | 2019-04-09 | Establishing method of vehicle target image database containing specific background image |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910278860.4ACN110008360B (en) | 2019-04-09 | 2019-04-09 | Establishing method of vehicle target image database containing specific background image |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110008360A CN110008360A (en) | 2019-07-12 |
| CN110008360Btrue CN110008360B (en) | 2020-11-03 |
Family
ID=67170402
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910278860.4AExpired - Fee RelatedCN110008360B (en) | 2019-04-09 | 2019-04-09 | Establishing method of vehicle target image database containing specific background image |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110008360B (en) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110443245B (en)* | 2019-08-14 | 2022-02-15 | 上海世茂物联网科技有限公司 | A method, device and equipment for locating license plate area in unrestricted scene |
| CN111083362A (en)* | 2019-12-13 | 2020-04-28 | 山东浪潮通软信息科技有限公司 | Method for realizing automatic focusing of vehicle entering and exiting warehouse |
| CN111460186B (en)* | 2020-03-31 | 2022-04-08 | 河北工业大学 | A method for establishing a database containing vehicle visible light images and infrared images |
| CN114173059B (en)* | 2021-12-09 | 2023-04-07 | 广州阿凡提电子科技有限公司 | Video editing system, method and device |
| CN117253231B (en)* | 2023-11-15 | 2024-01-26 | 四川弘和数智集团有限公司 | Oil-gas station image processing method and device, electronic equipment and storage medium |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108986058A (en)* | 2018-06-22 | 2018-12-11 | 华东师范大学 | The image interfusion method of lightness Consistency Learning |
| CN109410211A (en)* | 2017-08-18 | 2019-03-01 | 北京猎户星空科技有限公司 | The dividing method and device of target object in a kind of image |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105976345A (en)* | 2016-04-27 | 2016-09-28 | 北京航空航天大学 | Visible light remote sensing image synthesis method |
| CN107480611B (en)* | 2017-07-31 | 2020-06-30 | 浙江大学 | Crack identification method based on deep learning convolutional neural network |
| CN108460414B (en)* | 2018-02-27 | 2019-09-17 | 北京三快在线科技有限公司 | Generation method, device and the electronic equipment of training sample image |
| AU2018102037A4 (en)* | 2018-12-09 | 2019-01-17 | Ge, Jiahao Mr | A method of recognition of vehicle type based on deep learning |
- 2019
- 2019-04-09CNCN201910278860.4Apatent/CN110008360B/ennot_activeExpired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109410211A (en)* | 2017-08-18 | 2019-03-01 | 北京猎户星空科技有限公司 | The dividing method and device of target object in a kind of image |
| CN108986058A (en)* | 2018-06-22 | 2018-12-11 | 华东师范大学 | The image interfusion method of lightness Consistency Learning |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110008360A (en) | 2019-07-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110008360B (en) | Establishing method of vehicle target image database containing specific background image | |
| CN112633277B (en) | Channel ship plate detection, positioning and recognition method based on deep learning | |
| CN105373794B (en) | A kind of licence plate recognition method | |
| CN105005989B (en) | A kind of vehicle target dividing method under weak contrast | |
| CN109934163A (en) | A vehicle detection method based on scene prior and feature re-fusion in aerial images | |
| CN113593022B (en) | A high-precision map making method for unmanned mine scenes | |
| CN110378293B (en) | Method for producing high-precision map based on live-action three-dimensional model | |
| CN109633665A (en) | The sparse laser point cloud joining method of traffic scene | |
| CN109948471B (en) | Traffic haze visibility detection method based on improved IncepotionV 4 network | |
| CN105321342B (en) | A kind of intersection vehicles queue length detection method based on video of taking photo by plane | |
| CN105160309A (en) | Three-lane detection method based on image morphological segmentation and region growing | |
| CN114092917A (en) | MR-SSD-based shielded traffic sign detection method and system | |
| CN104881661A (en) | Vehicle detection method based on structure similarity | |
| CN113065478A (en) | Complex weather road vehicle target detection method | |
| CN108876805A (en) | The end-to-end unsupervised scene of one kind can traffic areas cognition and understanding method | |
| CN111209779A (en) | Method, device and system for detecting drivable area and controlling intelligent driving | |
| CN111723672B (en) | A method, device and storage medium for obtaining a video recognition driving track | |
| DE10160719A1 (en) | Method and device for recognizing and recognizing moving objects | |
| CN110853058B (en) | High-resolution remote sensing image road extraction method based on visual saliency detection | |
| CN114882205B (en) | Attention mechanism-based target detection method | |
| CN118608962A (en) | A highway crack detection method based on drone photography | |
| CN111460186B (en) | A method for establishing a database containing vehicle visible light images and infrared images | |
| CN116883963B (en) | Pedestrian crosswalk detection method based on improvement YOLOv5 | |
| CN119068234A (en) | A semantic map automatic annotation method, device and medium | |
| CN117710843A (en) | Intersection dynamic signal timing scheme detection method based on unmanned aerial vehicle video |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee | Granted publication date:20201103 |