CN109387724B - Synchronous camera fault diagnosis method based on longitudinal analysis and lateral correction - Google Patents
Synchronous camera fault diagnosis method based on longitudinal analysis and lateral correctionDownload PDFInfo
- Publication number
- CN109387724B CN109387724BCN201811154826.8ACN201811154826ACN109387724BCN 109387724 BCN109387724 BCN 109387724BCN 201811154826 ACN201811154826 ACN 201811154826ACN 109387724 BCN109387724 BCN 109387724B
- Authority
- CN
- China
- Prior art keywords
- camera
- current
- synchronous
- value
- disturbance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000001360synchronised effectEffects0.000titleclaimsabstractdescription34
- 238000000034methodMethods0.000titleclaimsabstractdescription30
- 238000012937correctionMethods0.000titleclaimsabstractdescription12
- 238000010234longitudinal analysisMethods0.000titleclaimsabstractdescription8
- 238000003745diagnosisMethods0.000titleclaimsabstractdescription6
- 230000005284excitationEffects0.000claimsabstractdescription26
- 238000012216screeningMethods0.000claimsabstractdescription20
- 238000004458analytical methodMethods0.000claimsabstractdescription16
- 101100129500Caenorhabditis elegans max-2 geneProteins0.000claimsdescription10
- 101100083446Danio rerio plekhh1 geneProteins0.000claimsdescription7
- 230000005587bubblingEffects0.000claimsdescription5
- 238000012423maintenanceMethods0.000abstractdescription8
- 238000001514detection methodMethods0.000description5
- 238000010586diagramMethods0.000description5
- 238000011160researchMethods0.000description3
- 230000005540biological transmissionEffects0.000description2
- 238000007405data analysisMethods0.000description2
- 230000009286beneficial effectEffects0.000description1
- 238000006243chemical reactionMethods0.000description1
- 238000005516engineering processMethods0.000description1
- 238000002955isolationMethods0.000description1
- 230000003068static effectEffects0.000description1
- 238000004804windingMethods0.000description1
Images








Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/50—Testing of electric apparatus, lines, cables or components for short-circuits, continuity, leakage current or incorrect line connections
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Tests Of Circuit Breakers, Generators, And Electric Motors (AREA)
- Testing Of Short-Circuits, Discontinuities, Leakage, Or Incorrect Line Connections (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及运维数据分析技术,具体涉及一种基于纵向分析横向修正的同步调相机故障诊断方法。The invention relates to an operation and maintenance data analysis technology, in particular to a fault diagnosis method for a synchronous camera based on vertical analysis and horizontal correction.
背景技术Background technique
电力系统扰动分析是监测电力保护系统性能的一项重要功能,扰动发生时,将对系统电气量产生不同程度的冲击,通过获得调相机并网后的运维数据,对扰动做出准确有效的故障预警、故障定位和故障检测,保证同步调相机以及相连系统的稳定性至关重要。分析国内外对调相机的研究,对单台调相机的纵向数据进行分析的较多,对多台调相机的横向数据研究还未成涉足,故障检测和定位的准确率较低。Power system disturbance analysis is an important function to monitor the performance of the power protection system. When disturbance occurs, it will have varying degrees of impact on the electrical quantity of the system. By obtaining the operation and maintenance data of the inverter after the grid is connected, accurate and effective measures can be made for the disturbance. Fault warning, fault location and fault detection are crucial to ensure the stability of synchronous cameras and connected systems. Analysis of domestic and foreign research on the control camera, the longitudinal data of a single control camera is mostly analyzed, and the lateral data research of multiple cameras has not been involved, and the accuracy of fault detection and positioning is low.
发明内容SUMMARY OF THE INVENTION
本发明的目的在于提供一种基于纵向分析横向修正的同步调相机运维数据分析方法,提高了故障检测和定位的准确率。The purpose of the present invention is to provide a synchronous camera operation and maintenance data analysis method based on vertical analysis and horizontal correction, which improves the accuracy of fault detection and location.
实现本发明目的的技术解决方案为:一种基于纵向分析横向修正的同步调相机故障诊断方法,包括如下内容:The technical solution for realizing the purpose of the present invention is: a method for diagnosing faults of a synchronous camera based on vertical analysis and horizontal correction, including the following contents:
(1)采用定值纵向数值分析法确定单台调相机机端是否发生单相接地故障,定位故障发生位置;(1) Determine whether a single-phase grounding fault occurs at the camera end of a single camera by using the fixed-value longitudinal numerical analysis method, and locate the fault location;
(2)采用平均均值横向筛选法或横向冒泡筛选比对法,确定多台同步调相机是否发生励磁电压扰动,定位扰动发生的位置。(2) Using the average mean transverse screening method or the transverse bubbling screening comparison method, determine whether the excitation voltage disturbance occurs in multiple synchronous modulators, and locate the position where the disturbance occurs.
作为一种具体实施方式,定值纵向数值分析法通过判断三相电压或电流的有效值是否在限定范围,对调相机单相接地故障进行检测和定位,若三相电压有效值满足[Umin,Umax],且三相电流有效值在[Imin1,Imax1],则判定调相机机端未发生单相接地故障,否则判断调相机机端发生单相接地故障,故障发生在电压有效值小于Umin,电流有效值小于Imin1的相,其中Umin为调相机正常运行时机端电压的70%~90%,Umax为调相机正常运行时机端电压的110%~130%,Imin1为调相机正常运行时机端电流的85%~95%,Imax1为调相机正常运行时机端电流的105%~115%。As a specific embodiment, the fixed-value longitudinal numerical analysis method detects and locates the single-phase ground fault of the camera by judging whether the effective value of the three-phase voltage or current is within a limited range. If the effective value of the three-phase voltage satisfies [Umin , Umax ], and the effective value of the three-phase current is [Imin1 , Imax1 ], then it is judged that there is no single-phase grounding fault at the camera side of the camera, otherwise it is judged that a single-phase grounding fault has occurred at the camera side of the camera, and the fault occurs at the RMS voltage Less than Umin , the phase of the current RMS value is less than Imin1 , where Umin is 70% to 90% of the terminal voltage of the inverter during normal operation, Umax is 110% to 130% of the terminal voltage of the inverter during normal operation, and Imin1 It is 85% to 95% of the terminal current when the camera is in normal operation, and Imax1 is 105% to 115% of the terminal current when the camera is in normal operation.
作为一种具体实施方式,平均均值横向筛选法通过判断机端电流有效值是否在限定范围,对调相机励磁扰动进行检测和定位,当存在调相机机端电流有效值大于Imax2,发出预警信号确定调相机受到扰动,扰动发生在电流有效值大于有效值均值I12的调相机机上,其中Imax2为调相机正常运行时电流的110%~130%。As a specific embodiment, the average mean value transverse screening method detects andlocates the excitation disturbance of the camera by judging whether the effective value of the current at the camera end is within a limited range. The camera is disturbed, and the disturbance occurs on the camera whose RMS current is greater than the average value of the RMS I12 , where Imax2 is 110% to 130% of the current of the camera during normal operation.
作为一种具体实施方式,横向冒泡筛选比对法通过判断机端电流有效值是否在限定范围,对调相机励磁扰动进行检测和定位,当存在调相机机端电流有效值大于Imax2,发出预警信号确定调相机受到扰动,再判断调相机在同一时刻机端电流是否相等,若相等,则判断多台调相机都受到扰动,否则电流最大的调相机都受到扰动。As a specific embodiment, the horizontal bubbling screening and comparison method detects and locates the excitation disturbance of the camera by judging whether the effective value of the current at the camera end is within a limited range, and when there is an effective value of the current at the camera end of the camera that is greater than Imax2 , an early warning is issued. The signal determines that the camera is disturbed, and then judges whether the current of the camera is equal at the same timing. If it is equal, it is judged that multiple cameras are disturbed, otherwise the camera with the largest current is disturbed.
本发明与现有技术相比,其显著优点:本发明综合分析调相机纵向和横向数据来判断是否发生扰动及扰动产生的影响,提高了故障诊断和定位的精度,有效提高了检修部门的运维效率。Compared with the prior art, the present invention has significant advantages: the present invention comprehensively analyzes the longitudinal and lateral data of the camera to judge whether disturbance occurs and the impact of the disturbance, improves the accuracy of fault diagnosis and positioning, and effectively improves the operation of the maintenance department. dimension efficiency.
附图说明Description of drawings
图1是同步调相机与SFC和交流电网的连接拓扑结构示意图。Figure 1 is a schematic diagram of the topological structure of the connection between the synchronous modulator, the SFC and the AC power grid.
图2是单台同步调相机机端发生单相接地短路故障的连接拓扑结构示意图。Figure 2 is a schematic diagram of the connection topology of a single-phase-to-ground short-circuit fault at the camera end of a single synchronous camera.
图3是同步调相机机端发生单相接地短路时三相电压有效值波形。Figure 3 is the three-phase voltage RMS waveform when a single-phase grounding short circuit occurs at the camera end of the synchronous camera.
图4是同步调相机机端发生单相接地短路时三相电流有效值波形。Figure 4 is the three-phase current RMS waveform when a single-phase grounding short circuit occurs at the camera end of the synchronous camera.
图5是采用定值纵向数值分析法分析调相机机端故障期间纵向分析数据流程图。Figure 5 is a flow chart of the longitudinal analysis data during the analysis of the camera-end fault of the camera using the fixed-value longitudinal numerical analysis method.
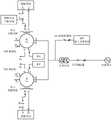
图6是两台同步调相机中一台调相机励磁电压受到扰动的连接拓扑结构示意图。Figure 6 is a schematic diagram of a connection topology in which the excitation voltage of one of the two synchronous modulators is disturbed.
图7是同步调相机励磁电压控制系统输出信号示意图。FIG. 7 is a schematic diagram of the output signal of the excitation voltage control system of the synchronous modulator.
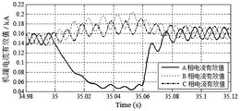
图8是同步调相机励磁电压受到扰动后机端电流有效值波形。Figure 8 is the waveform of the rms current value of the machine terminal current after the excitation voltage of the synchronous modulator is disturbed.
图9是采用平均均值横向筛选法分析调相机受到扰动期间横向修正数据流程图。Fig. 9 is a flow chart of analyzing the lateral correction data during the disturbance period of the camera using the mean mean lateral screening method.
图10是采用横向冒泡筛选比对法分析调相机受到扰动期间横向修正数据流程图。Figure 10 is a flow chart of the lateral correction data during the disturbance of the camera using the lateral bubbling screening comparison method.
具体实施方式Detailed ways
下面结合附图和具体实施例,进一步说明本发明方案。The solution of the present invention will be further described below with reference to the accompanying drawings and specific embodiments.
建立同步调相机与SFC(静止变频器)和交流电网的连接电路图,如图1所示,包括同步调相机、励磁系统、主变压器、并网断路器、交流电网、SFC连接断路器和SFC变频器。其中同步调相机机端连接主变压器和SFC连接断路器,主变压器另一侧与并网断路器相连,并网断路器与交流电网连接;SFC连接断路器另一侧与SFC变频器连接。电力系统中扰动分为大扰动和小扰动,其中大扰动包括调相机机端单相接地故障,小扰动是调相机励磁扰动,本专利主要针对上述两种扰动进行检测和定位。Establish the connection circuit diagram of the synchronous camera, SFC (static frequency converter) and AC power grid, as shown in Figure 1, including the synchronous camera, excitation system, main transformer, grid-connected circuit breaker, AC grid, SFC connection circuit breaker and SFC frequency conversion device. The synchronous camera end is connected to the main transformer and the SFC connection circuit breaker, the other side of the main transformer is connected to the grid-connected circuit breaker, and the grid-connected circuit breaker is connected to the AC grid; the other side of the SFC connection circuit breaker is connected to the SFC inverter. Disturbances in the power system are divided into large disturbances and small disturbances. The large disturbances include single-phase grounding faults at the camera end of the camera, and the small disturbances are the excitation disturbances of the camera. This patent mainly detects and locates the above two disturbances.
单台同步调相机机端发生单相接地短路故障的连接拓扑结构如图2所示,采用定值纵向数值分析法对单台同步调相机机端发生单相接地短路故障期间的电压、电流数据进行分析。假设调相机启动并网稳定运行后,在同步调相机运行至t0时,机端发生A相短路接地故障,持续时间t1。纵向分析机端电流和电压数据,同步调相机机端发生单相接地短路时的三相电压、电流波形如图3-4所示,其中UA、UB、UC分别为机端三相电压有效值,IA、IB、IC分别为机端三相电流有效值,可以看出同步调相机机端发生单相接地短路时电压和电流在一定的范围内,因此判断三相电压或电流的有效值是否在限定范围,可以对调相机进行故障预警和故障检测。The connection topology of a single-phase-to-ground short-circuit fault at the camera end of a single synchronous camera is shown in Figure 2. The fixed-value longitudinal numerical analysis method is used to analyze the voltage and current data of a single-phase-to-ground short-circuit fault at the camera side of a single synchronous camera analysis. Suppose that after the camera starts to operate stably and is connected to the grid, when the synchronous camera runs to t0 , a phase A short-circuit ground fault occurs at the camera end for a duration of t1 . Longitudinal analysis of the current and voltage data at the machine end, the three-phase voltage and current waveforms when a single-phase-to-ground short-circuit occurs at the machine end of the synchronous camera is shown in Figure 3-4, where UA , UB , and UC are the three-phase at the machine end respectively. The rms voltage, IA , IB , and IC are the rms values of the three-phase current at the machine end respectively. It can be seen that the voltage and current are within a certain range when the single-phase grounding short circuit occurs at the machine end of the synchronous camera, so the three-phase voltage is judged. Or whether the effective value of the current is within the limited range, the camera can be used for fault warning and fault detection.
采用定值纵向数值分析法分析调相机机端单相接地故障期间纵向分析数据流程如图5所示,当A相电压UA小于Umin,或B相电压UB大于Umax,或C相电压UC大于Umax时;或A相电流IA小于Imin1,或B相电流IB大于Imax1,或C相电流IC大于Imax1时,发出报警信号,确定调相机机端发生故障并定位故障相。其中Umin为调相机正常运行时机端电压的70%~90%(正常运行时机端电压为Ux),Umax为调相机正常运行时机端电压的110%~130%。Imin1为调相机正常运行时机端电流的85%~95%(正常运行时机端电流为Ix1),Imax1为调相机正常运行时机端电流的105%~115%。Using the constant value longitudinal numerical analysis method to analyze the longitudinal analysis data flow during the single-phase grounding fault at the camera end of the camera, as shown in Figure 5, when the phaseA voltage UA is less thanUmin , or the When the voltage UC is greater than Umax ; or the A-phase current IA is less than Imin1 , or the B-phase current IB is greater than Imax1 , or the C-phase current IC is greater than Imax1 , an alarm signal will be sent to determine that the camera side of the camera is faulty and locate the faulty phase. Among them, Umin is 70%~90% of the terminal voltage of the camera during normal operation (the terminal voltage during normal operation is Ux ), and Umax is 110% to 130% of the terminal voltage of the camera during normal operation. Imin1 is 85% to 95% of the terminal current of the camera during normal operation (the terminal current is Ix1 during normal operation), and Imax1 is 105% to 115% of the terminal current of the camera during normal operation.
根据国内外研究发现,现如今大多采用一台或两台调相机对特高压直流输电送、受端进行无功支撑,三台及以上在实际工程应用中几乎未成涉及,下面对两台调相机受励磁干扰的情况进行分析。两台同步调相机中一台调相机励磁电压受到扰动的连接拓扑结构如图6所示,相比于图1增加了励磁电压控制系统,其中同步调相机转子励磁绕组与励磁电压控制系统相连,励磁电压控制系统的另一侧是可供选择的励磁输入值,采用平均均值横向筛选法或横向冒泡筛选比对法,对多台同步调相机励磁电压受到扰动期间电流数据进行分析。调相机启动并网稳定运行后,运行在励磁控制系统状态,在同步调相机运行至t2时,总控选择器选择扰动控制系统,给励磁电压施加0.5p.u.的扰动电压,通过时序控制系统施加持续时间t3,总控选择器复位励磁控制系统经输出控制系统输出EFreal,同步调相机励磁电压控制系统输出信号如图7所示,同步调相机励磁电压受到扰动后机端电流有效值波形如图8所示,可以看出同步调相机励磁电压受到扰动后机端电流有效值在一定范围内,因此通过判断机端电流有效值是否在限定范围,可以对调相机进行故障预警和故障检测。According to research at home and abroad, one or two controllers are now mostly used to support the transmission and receiving terminals of UHVDC power transmission. Three or more controllers are hardly involved in practical engineering applications. The camera is subjected to excitation interference for analysis. The connection topology of the excitation voltage of one of the two synchronous condensers is disturbed as shown in Figure 6. Compared with Figure 1, an excitation voltage control system is added, in which the rotor excitation winding of the synchronous condenser is connected to the excitation voltage control system. The other side of the excitation voltage control system is the excitation input value that can be selected. The average mean transverse screening method or the transverse bubble screening comparison method is used to analyze the current data of multiple synchronous modulators during the excitation voltage disturbance. After the camera starts stable operation of grid connection, it runs in the state of the excitation control system. When the synchronous camera runs to t2 , the master control selector selects the disturbance control system, applies a disturbance voltage of 0.5pu to the excitation voltage, and applies it through the sequence control system. For the duration t3 , the master selector resets the excitation control system and outputs EFreal through the output control system, and the output signal of the excitation voltage control system of the synchronous modulator is shown in Figure 7. The RMS current waveform of the machine terminal after the excitation voltage of the synchronous modulator is disturbed As shown in Figure 8, it can be seen that the RMS current of the camera end is within a certain range after the excitation voltage of the synchronous camera is disturbed. Therefore, by judging whether the RMS current of the camera end is within the limited range, fault warning and fault detection can be performed for the camera.
采用平均均值横向筛选法分析调相机受到扰动期间横向修正数据流程如图9所示。平均均值横向筛选法中,I1和I2分别为1号和2号调相机机端电流有效值,I12为1号和2号调相机机端电流有效值的均值,判断当1号调相机电流I1大于Imax2,或2号调相机电流I2大于Imax2,发出预警信号确定调相机受到扰动,但不确定是哪台;判断当1号调相机电流I1大于等于I12,或2号调相机电流I2大于等于I12,发出报警信号定位哪台调相机受到扰动。其中Imax2为调相机正常运行时电流的110%~130%(正常运行时调相机电流为Ix2)。同理,当调相机台数为3台及以上时,仍然可以采用平均均值横向筛选法对扰动调相机进行分析。Figure 9 shows the process of analyzing the horizontal correction data during the disturbance of the camera using the average mean horizontal screening method. In the average mean horizontal screening method, I1 and I2 are the RMS currents of the camera terminals of the No. 1 and No. 2 cameras respectively, and I12 is the average value of the camera currents of the No. 1 and No. 2 camera terminals. If the camera current I1 is greater than Imax2 , or the current I2 of the No.2 camera is greater than Imax2 , an early warning signal is issued to determine that the camera is disturbed, but it is not sure whichone is; Or when the current I2 of the No. 2 camera is greater than or equal to I12 , an alarm signal is sent to locate which camera is disturbed. Among them, Imax2 is 110%~130% of the current of the camera during normal operation (the current of the camera during normal operation is Ix2 ). Similarly, when the number of cameras is 3 or more, the average mean horizontal screening method can still be used to analyze the disturbed cameras.
采用横向冒泡筛选比对法分析调相机受到扰动期间横向修正数据流程如图10所示。横向冒泡筛选比对法中,判断当1号调相机电流大于Imax2,或2号调相机电流大于Imax2,发出预警信息确定调相机受到扰动,但不确定是哪台;判断两台调相机在同一时刻机端电流是否相等,当不相等时,取两台调相机机端电流的最大值判断大小,电流大者为受到扰动调相机,发出报警信息;当相等时,可以判断两台调相机都受到扰动,发出报警信息。同理,当调相机台数为3台及以上时,仍然可以采用横向冒泡筛选比对法对扰动调相机进行分析。The horizontal bubbling screening comparison method is used to analyze the horizontal correction data flow during the disturbance of the camera, as shown in Figure 10. In the horizontal bubble screening and comparison method, it is judged that when the current of the No. 1 camera is greater than Imax2 , or the current of the No. 2 camera is greater than Imax2 , an early warning message is issued to confirm that the camera is disturbed, but it is not sure which one is; Whether the currents of the cameras are equal at the same time, if they are not equal, take the maximum value of the currents of the two cameras to determine the size. The larger current is the disturbed camera, and an alarm message will be sent; when they are equal, the two cameras can be judged. The camera is disturbed and an alarm message is issued. Similarly, when the number of cameras is 3 or more, the horizontal bubble screening and comparison method can still be used to analyze the disturbed cameras.
本发明对单台调相机纵向报警数据与多台调相机横向报警数据分析,可以为故障隔离提供策略指导,有益于提高检修部门运维效率。The invention analyzes the longitudinal alarm data of a single camera and the lateral alarm data of multiple cameras, can provide strategic guidance for fault isolation, and is beneficial to improve the operation and maintenance efficiency of the maintenance department.
Claims (3)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811154826.8ACN109387724B (en) | 2018-09-30 | 2018-09-30 | Synchronous camera fault diagnosis method based on longitudinal analysis and lateral correction |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811154826.8ACN109387724B (en) | 2018-09-30 | 2018-09-30 | Synchronous camera fault diagnosis method based on longitudinal analysis and lateral correction |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109387724A CN109387724A (en) | 2019-02-26 |
| CN109387724Btrue CN109387724B (en) | 2020-10-27 |
Family
ID=65419096
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811154826.8AExpired - Fee RelatedCN109387724B (en) | 2018-09-30 | 2018-09-30 | Synchronous camera fault diagnosis method based on longitudinal analysis and lateral correction |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN109387724B (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110488136B (en)* | 2019-08-12 | 2021-11-30 | 河海大学 | Rotor one-point grounding fault detection method of phase modulator excitation system |
| CN110617981B (en)* | 2019-09-16 | 2021-06-15 | 江苏方天电力技术有限公司 | A kind of camera fault diagnosis method |
| CN111835018B (en)* | 2020-04-30 | 2021-09-10 | 南京理工大学 | Synchronous phase modulator starting grid-connected circuit based on time sequence hybrid excitation control and control method |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101507072A (en)* | 2006-08-18 | 2009-08-12 | Abb研究有限公司 | Ground fault detection |
| CN102608491A (en)* | 2010-12-22 | 2012-07-25 | 通用电气公司 | System and method for synchronous machine health monitoring |
| CN106199424A (en)* | 2016-06-29 | 2016-12-07 | 湖南工业大学 | A kind of permagnetic synchronous motor interturn short-circuit failure diagnosing method |
| CN106841899A (en)* | 2017-01-09 | 2017-06-13 | 清华大学 | The device open fault diagnostic method and device of chain static synchronization series compensator |
| CN107111284A (en)* | 2014-10-07 | 2017-08-29 | 德克萨斯仪器股份有限公司 | Detecting Faults in Field Oriented Control Permanent Magnet Synchronous Motors |
| CN108089126A (en)* | 2017-12-04 | 2018-05-29 | 国网湖南省电力公司 | Phase modifier method for diagnosing faults, device and equipment |
| CN108536945A (en)* | 2018-04-02 | 2018-09-14 | 国网湖南省电力有限公司 | A kind of fault diagnosis method and system for large-scale phase modifier |
- 2018
- 2018-09-30CNCN201811154826.8Apatent/CN109387724B/ennot_activeExpired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101507072A (en)* | 2006-08-18 | 2009-08-12 | Abb研究有限公司 | Ground fault detection |
| CN102608491A (en)* | 2010-12-22 | 2012-07-25 | 通用电气公司 | System and method for synchronous machine health monitoring |
| CN107111284A (en)* | 2014-10-07 | 2017-08-29 | 德克萨斯仪器股份有限公司 | Detecting Faults in Field Oriented Control Permanent Magnet Synchronous Motors |
| CN106199424A (en)* | 2016-06-29 | 2016-12-07 | 湖南工业大学 | A kind of permagnetic synchronous motor interturn short-circuit failure diagnosing method |
| CN106841899A (en)* | 2017-01-09 | 2017-06-13 | 清华大学 | The device open fault diagnostic method and device of chain static synchronization series compensator |
| CN108089126A (en)* | 2017-12-04 | 2018-05-29 | 国网湖南省电力公司 | Phase modifier method for diagnosing faults, device and equipment |
| CN108536945A (en)* | 2018-04-02 | 2018-09-14 | 国网湖南省电力有限公司 | A kind of fault diagnosis method and system for large-scale phase modifier |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109387724A (en) | 2019-02-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107102236B (en) | A single-phase-to-ground fault line selection method based on post-fault waveform correlation analysis | |
| CN104483643B (en) | Modeling method based on detection platform of fault indicator for physical simulation of power distribution network | |
| CN107069682B (en) | A backup protection method of HVDC transmission line based on DC control system | |
| CN106501668B (en) | A kind of conventional electrical distribution net single-phase wire break fault-line selecting method | |
| CN109831033B (en) | Power supply line early warning protection equipment and segmentation monitoring early warning system | |
| CN104793106B (en) | Distribution line fault section location method based on current break rate | |
| CN106707081A (en) | Flexible DC power distribution network monopolar grounding fault identification and fault protection method | |
| CN109387724B (en) | Synchronous camera fault diagnosis method based on longitudinal analysis and lateral correction | |
| CN104820157A (en) | Direct-current single-pole ground fault determination method of flexible direct-current power transmission system | |
| CN103887772B (en) | Flexible DC power transmission grounding measurement device and protection method | |
| CN108258662A (en) | A kind of multiterminal flexible direct current distribution line transient protection method and device | |
| CN107797023B (en) | Three-phase voltage unbalanced source location method, device and system | |
| CN103308806A (en) | Islanding detection method based on fundamental frequency and switching-frequency sub-impedance | |
| CN111579929A (en) | A fault current limiting protection method for DC distribution network based on multi-terminal data | |
| CN102944804A (en) | Overhead line fault detection system | |
| CN110095688A (en) | LCC-MMC mixes three end DC transmission system fault detection methods and device | |
| US20210396790A1 (en) | Method and device for approximately determining voltages at a high-voltage side of a transformer | |
| CN111697548A (en) | Pilot protection method for identifying internal and external faults of multi-terminal flexible direct current power grid region | |
| CN117277246B (en) | Active and passive combined power distribution network ground fault self-adaptive arc extinction method | |
| CN107069747B (en) | A method for determining the minimum power-on mode based on regional voltage stability | |
| CN111289843B (en) | An Interpole Fault Location Method for DC Lines in MMC-MTDC System | |
| CN114397504B (en) | DC component short circuit connection and disconnection test full circuit power factor test method | |
| CN211554105U (en) | Converter station direct current voltage measurement abnormity rapid diagnosis circuit | |
| CN117977507A (en) | A method and system for active distribution network pilot protection based on time domain characteristics | |
| CN202816637U (en) | Voltage transformer |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right | Effective date of registration:20210617 Address after:No. 200, Xiaolingwei street, Xuanwu District, Nanjing City, Jiangsu Province Patentee after:NANJING University OF SCIENCE AND TECHNOLOGY Patentee after:Nanjing wanmaoda Electronic Technology Co.,Ltd. Address before:210094 Xuanwu District, Jiangsu, Xiaolingwei 200, Nanjing Patentee before:NANJING University OF SCIENCE AND TECHNOLOGY | |
| TR01 | Transfer of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee | Granted publication date:20201027 Termination date:20210930 | |
| CF01 | Termination of patent right due to non-payment of annual fee |