CN109310437B - Cartridge Locking Arrangement for Rotating Powered Surgical Cutting and Stapling Instruments - Google Patents
Cartridge Locking Arrangement for Rotating Powered Surgical Cutting and Stapling InstrumentsDownload PDFInfo
- Publication number
- CN109310437B CN109310437BCN201780037720.7ACN201780037720ACN109310437BCN 109310437 BCN109310437 BCN 109310437BCN 201780037720 ACN201780037720 ACN 201780037720ACN 109310437 BCN109310437 BCN 109310437B
- Authority
- CN
- China
- Prior art keywords
- firing
- cartridge
- staple
- end effector
- firing member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















































































Landscapes
- Surgical Instruments (AREA)
Abstract
Description
Translated fromChinese背景技术Background technique
本发明涉及外科器械,并且在各种布置中,涉及被设计成缝合和切割组织的外科缝合和切割器械及与其一起使用的钉仓。The present invention relates to surgical instruments and, in various arrangements, to surgical stapling and cutting instruments and staple cartridges for use therewith designed to staple and cut tissue.
附图说明Description of drawings
本文所述的实施方案的各种特征连同其优点可结合如下附图根据以下描述来加以理解:The various features of the embodiments described herein, along with their advantages, can be understood from the following description in conjunction with the accompanying drawings:
图1为根据至少一个实施方案的外科器械系统的透视图;1 is a perspective view of a surgical instrument system in accordance with at least one embodiment;
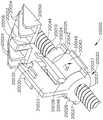
图2为根据至少一个实施方案的旋转从动击发组件的一部分和外科钉仓的滑动件的透视图,其中滑动件处于起始位置并且击发组件处于第一“解锁”位置;2 is a perspective view of a portion of a rotationally driven firing assembly and a slider of a surgical staple cartridge with the slider in a home position and the firing assembly in a first "unlocked" position, according to at least one embodiment;
图3为图2的旋转从动击发组件实施方案的一部分处于第二“锁定”位置的另一个透视图,其中滑动件不在起始位置;Figure 3 is another perspective view of a portion of the rotary driven firing assembly embodiment of Figure 2 in a second "locked" position with the slider not in the home position;
图4为根据至少一个实施方案的外科钉仓的侧正视图,该外科钉仓最初安装在外科端部执行器中,该外科端部执行器被构造成能够切割和缝合组织;4 is a side elevational view of a surgical staple cartridge initially installed in a surgical end effector configured to cut and staple tissue, according to at least one embodiment;
图5为坐置在图4的外科端部执行器的通道中的外科钉仓的另一侧正视图,其中外科钉仓的滑动件处于起始位置并且与外科器械的击发构件接合;5 is another side elevational view of the surgical staple cartridge seated in the channel of the surgical end effector of FIG. 4 with the surgical staple cartridge sled in a starting position and engaged with a firing member of a surgical instrument;
图6为坐置在图4的外科端部执行器的通道中的部分使用的外科钉仓的另一侧正视图,其中外科钉仓的滑动件不处于起始位置;6 is another side elevational view of the partially used surgical staple cartridge seated in the channel of the surgical end effector of FIG. 4 with the slider of the surgical staple cartridge not in the home position;
图7为根据至少一个实施方案的旋转从动击发组件的一部分和外科切割和缝合端部执行器的通道的透视图,其中击发组件处于“锁定”位置;7 is a perspective view of a portion of a rotationally driven firing assembly and a channel of a surgical cutting and stapling end effector with the firing assembly in a "locked" position, according to at least one embodiment;
图8为图7的旋转驱动击发组件的一部分和外科钉仓的滑动件的另一透视图,其中滑动件处于起始位置并且击发组件处于“解锁”位置;8 is another perspective view of a portion of the rotationally driven firing assembly of FIG. 7 and the slider of the surgical staple cartridge with the slider in a home position and the firing assembly in an "unlocked" position;
图9为根据至少一个实施方案的螺纹螺母部分的透视图;9 is a perspective view of a threaded nut portion in accordance with at least one embodiment;
图10为图9的螺纹螺母部分安装在以横截面示出的对应的通道实施方案中的透视图;10 is a perspective view of the threaded nut portion of FIG. 9 installed in a corresponding channel embodiment shown in cross-section;
图11为图10的通道和螺纹螺母部分的横截面正视图,其中螺纹螺母部分处于锁定位置;Figure 11 is a cross-sectional elevation view of the channel and threaded nut portion of Figure 10 with the threaded nut portion in a locked position;
图12为图10和图11的通道和螺纹螺母部分的另一个横截面正视图,其中螺母部分处于解锁位置;Figure 12 is another cross-sectional elevation view of the channel and threaded nut portion of Figures 10 and 11 with the nut portion in an unlocked position;
图13为图10至图12的通道和螺纹螺母部分的另一横截面正视图,其中螺纹螺母部分处于锁定位置并且示出了外科钉仓的滑动件初始安装到通道中,其中为了清除起见省略仓主体;13 is another cross-sectional elevation view of the channel and threaded nut portion of FIGS. 10-12 with the threaded nut portion in the locked position and showing the initial installation of the slider of the surgical cartridge into the channel, omitted for clarity warehouse main body;
图14为图13的通道、螺纹螺母部分和滑动件的另一横截面正视图,其中安装滑动件以便将螺母部分移动到解锁位置;Figure 14 is another cross-sectional elevation view of the channel, threaded nut portion, and slide of Figure 13 with the slide installed to move the nut portion to the unlocked position;
图15为根据至少一个实施方案的外科切割和缝合端部执行器的横截面侧正视图;15 is a cross-sectional side elevation view of a surgical cutting and stapling end effector according to at least one embodiment;
图16为图15的外科端部执行器的砧座组件的分解透视组装图;Figure 16 is an exploded perspective assembled view of the anvil assembly of the surgical end effector of Figure 15;
图17为图16的砧座组件的横截面视图;Figure 17 is a cross-sectional view of the anvil assembly of Figure 16;
图18为图15的外科端部执行器的横截面视图,其中其击发构件组件处于锁定位置;Figure 18 is a cross-sectional view of the surgical end effector of Figure 15 with its firing member assembly in a locked position;
图19为图18的外科端部执行器在其近侧端部处截取的另一横截面视图,其中击发构件组件处于解锁位置;Figure 19 is another cross-sectional view of the surgical end effector of Figure 18 taken at its proximal end with the firing member assembly in an unlocked position;
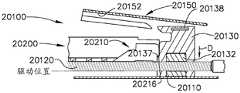
图20为图18的外科端部执行器在图19的视图远侧的位置处截取的另一横截面视图;20 is another cross-sectional view of the surgical end effector of FIG. 18 taken at a position distal to the view of FIG. 19;
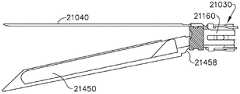
图21为根据至少一个实施方案的外科缝合器械的透视图,该外科缝合器械包括柄部和可替换的装载单元;Figure 21 is a perspective view of a surgical stapling instrument including a handle and a replaceable loading unit according to at least one embodiment;
图22为图21的装载单元的透视图,示出了具有从装载单元拆卸的钉仓夹具;FIG. 22 is a perspective view of the loading unit of FIG. 21, shown with the cartridge clamp detached from the loading unit;
图23为根据至少一个实施方案的外科缝合器械的透视图,该外科缝合器械包括柄部和可替换的装载单元;Figure 23 is a perspective view of a surgical stapling instrument including a handle and a replaceable loading unit according to at least one embodiment;
图24为图23的装载单元的透视图;Figure 24 is a perspective view of the loading unit of Figure 23;
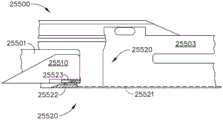
图25示出了图23的柄部和装载单元的连接部分;Figure 25 shows the connection portion of the handle and loading unit of Figure 23;
图26为图21的装载单元的端部执行器的横截面视图;Figure 26 is a cross-sectional view of the end effector of the loading unit of Figure 21;
图27为图21的钉仓夹具和钉装载单元的框架之间的附接的详细视图;Figure 27 is a detailed view of the attachment between the staple cartridge clamp of Figure 21 and the frame of the staple loading unit;
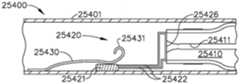
图28为根据至少一个实施方案的装载单元的端部执行器的横截面视图;28 is a cross-sectional view of an end effector of a loading unit according to at least one embodiment;
图29为图28的钉仓夹具和装载单元的框架之间的附接的详细视图;Figure 29 is a detailed view of the attachment between the cartridge clamp of Figure 28 and the frame of the loading unit;
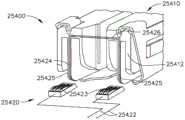
图30为图28的装载单元的框架的透视图;Figure 30 is a perspective view of the frame of the loading unit of Figure 28;
图31为图28的钉仓夹具的近侧的详细视图;Figure 31 is a detailed view of the proximal side of the cartridge clamp of Figure 28;
图32为示出图28的框架和钉仓夹具之间的连接的详细视图;Figure 32 is a detailed view showing the connection between the frame of Figure 28 and the cartridge clamp;
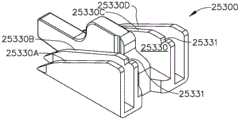
图33为根据至少一个实施方案的钉仓夹具的分解视图;33 is an exploded view of a staple cartridge clamp in accordance with at least one embodiment;
图34为根据至少一个实施方案的装载单元的局部透视图;34 is a partial perspective view of a loading unit according to at least one embodiment;
图35为根据所示的至少一个实施方案的装载单元的框架的局部正视图,其中没有钉仓夹具附接到该框架;35 is a partial front view of the frame of the loading unit according to at least one embodiment shown, with no cartridge clamps attached to the frame;
图36为附接到图35的装载单元的框架的钉仓夹具的局部正视图;Figure 36 is a partial front view of the cartridge clamp attached to the frame of the loading unit of Figure 35;
图37为以夹紧构造示出的图35的装载单元的局部正视图;37 is a partial front view of the loading unit of FIG. 35 shown in a clamped configuration;
图38为以部分击发构造示出的图35的装载单元的局部正视图;38 is a partial front view of the loading unit of FIG. 35 shown in a partially fired configuration;
图39为根据所示的至少一个实施方案的装载单元的框架的局部正视图,其中没有附接钉仓夹具;39 is a partial front view of the frame of the loading unit according to at least one embodiment shown without the cartridge clamp attached;
图40为附接到图39的装载单元的框架的钉仓夹具的局部正视图;Figure 40 is a partial front view of the cartridge clamp attached to the frame of the loading unit of Figure 39;
图41为以夹紧构造示出的图39的装载单元的局部正视图;Figure 41 is a partial front view of the loading unit of Figure 39 shown in a clamped configuration;
图42为以部分击发构造示出的图39的装载单元的局部正视图;Figure 42 is a partial front view of the loading unit of Figure 39 shown in a partially fired configuration;
图43为所示的图39的装载单元的局部透视图,其中钉仓夹具附接到框架;43 is a partial perspective view of the loading unit of FIG. 39 shown with the cartridge clamp attached to the frame;
图44为根据至少一个实施方案的钉仓夹具的局部透视图,该钉仓夹具附接到装载单元的框架。44 is a partial perspective view of a staple cartridge clamp attached to a frame of a loading unit, according to at least one embodiment.
图45为试图将图44的钉仓夹具附接到装载单元的局部正视图,该装载单元被构造成接收不同的钉仓夹具;45 is a partial front view of an attempt to attach the cartridge clamp of FIG. 44 to a loading unit configured to receive a different cartridge clamp;
图46为图44的钉仓夹具的局部正视图,该钉仓夹具附接到图44的装载单元的框架;46 is a partial front view of the cartridge clamp of FIG. 44 attached to the frame of the loading unit of FIG. 44;
图47为根据至少一个实施方案的钉仓夹具和装载单元的框架之间的连接的局部正视图;47 is a partial front view of the connection between the cartridge clamp and the frame of the loading unit in accordance with at least one embodiment;
图48为图47的装载单元的局部正视图;Figure 48 is a partial front view of the loading unit of Figure 47;
图49为钉仓夹具的局部正视图,该钉仓夹具被构造成能够与除图47的装载单元之外的不同的装载单元一起使用,该装载单元附接到图47的装载单元;49 is a partial front view of a staple cartridge clamp configured for use with a different loading unit than the loading unit of FIG. 47 attached to the loading unit of FIG. 47;
图50为外科器械系统的局部正视图,该外科器械系统包括以闭锁构造示出的可偏转锁定布置;Figure 50 is a partial front view of a surgical instrument system including a deflectable locking arrangement shown in a latched configuration;
图51为图50的外科器械系统的局部正视图,其中闭锁布置以解锁构造示出;Figure 51 is a partial front view of the surgical instrument system of Figure 50 with the latching arrangement shown in an unlocked configuration;
图52为外科器械系统的局部正视图,该外科器械系统包括以闭锁构造示出的磁性锁定布置;Figure 52 is a partial front view of a surgical instrument system including a magnetic locking arrangement shown in a latched configuration;
图53为图52的外科器械系统的局部正视图,其中磁性闭锁布置以解锁构造示出;Figure 53 is a partial front view of the surgical instrument system of Figure 52 with the magnetic latch arrangement shown in an unlocked configuration;
图54为图52的外科器械系统的局部正视图,以部分击发的构造示出;Figure 54 is a partial front view of the surgical instrument system of Figure 52, shown in a partially fired configuration;
图55为用于外科器械系统的钉仓的局部透视图,其中钉仓包括构造成能够控制外科器械系统的闭锁布置的驱动器;55 is a partial perspective view of a staple cartridge for a surgical instrument system, wherein the staple cartridge includes a driver configured to control a latching arrangement of the surgical instrument system;
图56为用于与图55的钉仓一起使用的滑动件的透视图;Figure 56 is a perspective view of a slider for use with the staple cartridge of Figure 55;
图57为图55的钉仓的假驱动器的透视图;Figure 57 is a perspective view of a dummy driver of the staple cartridge of Figure 55;
图58为利用图55的钉仓的外科器械系统的局部正视图,其中外科器械系统包括闭锁布置,该闭锁布置被构造成能够限制击发构件的运动,直到钉仓被装载到外科器械系统中;58 is a partial front view of a surgical instrument system utilizing the staple cartridge of FIG. 55, wherein the surgical instrument system includes a latching arrangement configured to restrict movement of the firing member until the staple cartridge is loaded into the surgical instrument system;
图59为图58的外科器械系统的局部正视图,其中闭锁布置以解锁构造示出;Fig. 59 is a partial front view of the surgical instrument system of Fig. 58 with the latching arrangement shown in an unlocked configuration;
图60为以部分击发构造示出的图58的外科器械系统的局部正视图;Figure 60 is a partial front view of the surgical instrument system of Figure 58 shown in a partially fired configuration;
图61为用于与外科器械系统一起使用的钉仓的局部透视图,其中外科器械系统包括闭锁电路,该闭锁电路包括可分离构件;61 is a partial perspective view of a staple cartridge for use with a surgical instrument system, wherein the surgical instrument system includes a latching circuit including a detachable member;
图62为图61的外科器械系统的横截面平面视图,其中外科器械系统还包括电磁体和闭锁构件,其中闭锁构件被示出处于解锁位置,并且其中闭锁电路处于闭合构造;62 is a cross-sectional plan view of the surgical instrument system of FIG. 61 , wherein the surgical instrument system further includes an electromagnet and a latching member, wherein the latching member is shown in an unlocked position, and wherein the latching circuit is in a closed configuration;
图63为图61的外科器械系统的横截面平面视图,其中闭锁构件被示出处于锁定位置,并且其中闭锁电路处于打开构造;Figure 63 is a cross-sectional plan view of the surgical instrument system of Figure 61 with the latching member shown in a locked position and with the latching circuit in an open configuration;
图64为外科器械系统的透视图,其中外科器械系统包括电路闭锁布置,该电路闭锁布置包括定位在滑动件上用于与钉仓一起使用的电接触件;Figure 64 is a perspective view of a surgical instrument system, wherein the surgical instrument system includes an electrical latching arrangement including electrical contacts positioned on a slider for use with a staple cartridge;
图65为图64的外科器械系统的局部正视图;Figure 65 is a partial front view of the surgical instrument system of Figure 64;
图66为击发构件闭锁件的局部横截面视图,示出了处于锁定构造的击发构件闭锁件;Figure 66 is a partial cross-sectional view of the firing member latch showing the firing member latch in a locked configuration;
图67为沿图66中的线67-67截取的图66的击发构件闭锁件的横截面视图;Figure 67 is a cross-sectional view of the firing member lockout of Figure 66 taken along line 67-67 in Figure 66;
图68为图66的击发构件闭锁件的局部横截面视图,示出了处于解锁构造的击发构件闭锁件;Figure 68 is a partial cross-sectional view of the firing member lockout of Figure 66, showing the firing member lockout in an unlocked configuration;
图69为沿图68中的线69-69截取的图66的击发构件闭锁件的横截面视图;Figure 69 is a cross-sectional view of the firing member lockout of Figure 66 taken along line 69-69 in Figure 68;
图70为沿图68中的线70-70截取的图66的击发构件闭锁件的横截面平面视图;Figure 70 is a cross-sectional plan view of the firing member lockout of Figure 66 taken along line 70-70 in Figure 68;
图71为根据至少一个实施方案的包括未用过的钉仓的缝合组件的局部正视图;71 is a partial front view of a stapling assembly including an unused staple cartridge, according to at least one embodiment;
图72为图71的缝合组件的局部平面视图;Figure 72 is a partial plan view of the suturing assembly of Figure 71;
图73为在用尽状态下示出的图71的缝合组件的局部正视图;Figure 73 is a partial front view of the suture assembly of Figure 71 shown in an exhausted state;
图74为图73的状态下所示的图71的缝合组件的局部平面视图;Figure 74 is a partial plan view of the suture assembly of Figure 71 shown in the state of Figure 73;
图75为根据至少一个实施方案的包括未用过的钉仓的缝合组件的局部透视图;75 is a partial perspective view of a stapling assembly including an unused staple cartridge, according to at least one embodiment;
图76为在用尽状态下示出的图75的缝合组件的局部透视图;Figure 76 is a partial perspective view of the suture assembly of Figure 75 shown in an exhausted state;
图77为所示缝合组件的局部透视图,其中为了说明的目的移除了部件;Figure 77 is a partial perspective view of the illustrated suturing assembly with components removed for illustration purposes;
图78示出了图77的缝合组件的销,其被构造成能够影响缝合组件的检测电路;Fig. 78 shows a pin of the suturing assembly of Fig. 77 configured to affect a detection circuit of the suturing assembly;
图79为图77的缝合组件的某些部件的局部透视图;Figure 79 is a partial perspective view of certain components of the suturing assembly of Figure 77;
图80为图77的缝合组件的轴壳体的局部透视图;Figure 80 is a partial perspective view of the shaft housing of the suture assembly of Figure 77;
图81为根据至少一个实施方案的钉仓的局部平面视图;81 is a partial plan view of a staple cartridge according to at least one embodiment;
图81A示出了在至少一个实施方案中击发钉仓时所经历的击发力曲线;Figure 81A shows a firing force profile experienced when firing a staple cartridge in at least one embodiment;
图82为根据至少一个实施方案的包括闭锁件的缝合组件的局部横截面视图;82 is a partial cross-sectional view of a suturing assembly including a closure according to at least one embodiment;
图83为以闭锁构造示出的图82的缝合组件的局部横截面视图;83 is a partial cross-sectional view of the suturing assembly of FIG. 82 shown in a closed configuration;
图84为根据至少一个实施方案的包括闭锁件的缝合组件的局部横截面视图;84 is a partial cross-sectional view of a suturing assembly including a closure according to at least one embodiment;
图85为根据至少一个实施方案的包括闭锁件的缝合组件的局部横截面视图;85 is a partial cross-sectional view of a suturing assembly including a closure according to at least one embodiment;
图86为根据至少一个实施方案的包括制动器的缝合组件的局部横截面视图;Figure 86 is a partial cross-sectional view of a suture assembly including a stopper, according to at least one embodiment;
图87为根据至少一个实施方案的包括阻尼系统的缝合组件的局部横截面视图;87 is a partial cross-sectional view of a suture assembly including a damping system according to at least one embodiment;
图88为示出根据至少一个实施方案的包括电磁制动器的缝合组件的示意图;88 is a schematic diagram illustrating a suturing assembly including an electromagnetic actuator in accordance with at least one embodiment;
图89为根据至少一个实施方案的包括阻尼系统的缝合组件的局部横截面视图;89 is a partial cross-sectional view of a suture assembly including a damping system according to at least one embodiment;
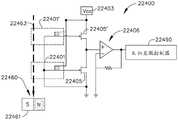
图90为构造成能够检测钉击发构件的位置和前进的电路,示出了钉击发构件处于完全击发位置;Figure 90 is a circuit configured to detect the position and advancement of the staple firing member, showing the staple firing member in a fully fired position;
图91示出了处于完全缩回位置的图90的钉击发构件;Figure 91 shows the staple firing member of Figure 90 in a fully retracted position;
图92为根据以解锁构造示出的至少一个实施方案的缝合组件的横截面视图,该缝合组件包括闭锁件;92 is a cross-sectional view of a suturing assembly including a latch according to at least one embodiment shown in an unlocked configuration;
图93为以解锁构造示出的图92的缝合组件的横截面端视图;Figure 93 is a cross-sectional end view of the suture assembly of Figure 92 shown in an unlocked configuration;
图94为以锁定构造示出的图92的缝合组件的横截面视图;并且Fig. 94 is a cross-sectional view of the suturing assembly of Fig. 92 shown in a locked configuration; and
图95为以其锁定构造示出的图92的缝合组件的横截面端视图。95 is a cross-sectional end view of the suture assembly of FIG. 92 shown in its locked configuration.
在所述若干视图中,对应的参考符号指示对应的部件。本文所述的范例以一种形式示出了本发明的各种实施方案,且这种范例不应被解释为以任何方式限制本发明的范围。Corresponding reference characters indicate corresponding parts throughout the several views. The exemplifications described herein illustrate various embodiments of the invention in one form, and such exemplifications should not be construed to limit the scope of the invention in any way.
具体实施方式Detailed ways
本申请的申请人拥有以下美国专利申请,所述美国专利申请与本申请于同一日期提交且各自全文以引用方式并入本文:The applicant of the present application owns the following US patent applications, which were filed on the same date as this application and each of which is incorporated herein by reference in its entirety:
-名称为“包括闭锁件的外科器械(SURGICAL INSTRUMENT COMPRISING ALOCKOUT)”的美国专利申请序列号15/131,311;代理人案卷号END7828USNP/150542;- US Patent Application Serial No. 15/131,311 entitled "SURGICAL INSTRUMENT COMPRISING ALOCKOUT"; Attorney Docket No. END7828USNP/150542;
-名称为“包括主要击发闭锁件和次级击发闭锁件的外科器械(SURGICALINSTRUMENT COMPRISING A PRIMARY FIRING LOCKOUT AND A SECONDARY FIRINGLOCKOUT)”的美国专利申请序列号15/131,304;代理人案卷号END7787USNP/150522;- US Patent Application Serial No. 15/131,304 entitled "SURGICAL INSTRUMENT COMPRISING A PRIMARY FIRING LOCKOUT AND A SECONDARY FIRING LOCKOUT"; Attorney Docket No. END7787USNP/150522;
-名称为“包括磁性闭锁件的外科器械系统(SURGICAL INSTRUMENT COMPRISING APRIMARY FIRING LOCKOUT AND A SECONDARY FIRING LOCKOUT)”的美国专利申请序列号15/131,282;代理人案卷号END7789USNP/150503;以及- US Patent Application Serial No. 15/131,282 entitled "SURGICAL INSTRUMENT COMPRISING APRIMARY FIRING LOCKOUT AND A SECONDARY FIRING LOCKOUT"; Attorney Docket No. END7789USNP/150503; and
-名称为“包括可替换仓夹具的外科器械(SURGICAL INSTRUMENT COMPRISING AREPLACEABLE CARTRIDGE JAW)”的美国专利申请序列号15/131,289;代理人案卷号END7790USNP/150504。- US Patent Application Serial No. 15/131,289 entitled "SURGICAL INSTRUMENT COMPRISING AREPLACEABLE CARTRIDGE JAW"; Attorney Docket No. END7790USNP/150504.
本申请的申请人拥有以下专利申请,这些专利申请于2016年4月15日提交,并且各自以引用方式全文并入本文:The applicant of the present application has the following patent applications, which were filed on April 15, 2016, and each of which is hereby incorporated by reference in its entirety:
-名称为“钉形成检测机构(STAPLE FORMATION DETECTION MECHANISMS)”的美国专利申请序列号15/130,575;- US Patent Application Serial No. 15/130,575 entitled "STAPLE FORMATION DETECTION MECHANISMS";
-名称为“具有检测传感器的外科器械(SURGICAL INSTRUMENT WITH DETECTIONSENSORS)”的美国专利申请序列号15/130,582;- US Patent Application Serial No. 15/130,582 entitled "SURGICAL INSTRUMENT WITH DETECTIONSENSORS";
-名称为“在击发运动期间具有改善的停止/起动控制的外科器械(SURGICALINSTRUMENT WITH IMPROVED STOP/START CONTROL DURING A FIRING MOTION)”的美国专利申请序列号15/130,588;- US Patent Application Serial No. 15/130,588 entitled "SURGICAL INSTRUMENT WITH IMPROVED STOP/START CONTROL DURING A FIRING MOTION";
-名称为“在击发运动期间具有可调节停止/起动控制的外科器械(SURGICALINSTRUMENT WITH ADJUSTABLE STOP/START CONTROL DURING A FIRING MOTION)”的美国专利申请序列号15/130,595;- US Patent Application Serial No. 15/130,595 entitled "SURGICAL INSTRUMENT WITH ADJUSTABLE STOP/START CONTROL DURING A FIRING MOTION";
-名称为“在击发运动期间具有多个程序响应的外科器械(SURGICAL INSTRUMENTWITH MULTIPLE PROGRAM RESPONSES DURING A FIRING MOTION)”的美国专利申请序列号15/130,566;- US Patent Application Serial No. 15/130,566 entitled "SURGICAL INSTRUMENTWITH MULTIPLE PROGRAM RESPONSES DURING A FIRING MOTION";
-名称为“在击发运动期间具有多个程序响应的外科器械(SURGICAL INSTRUMENTWITH MULTIPLE PROGRAM RESPONSES DURING A FIRING MOTION)”美国专利申请序列号15/130,571;- US Patent Application Serial No. 15/130,571 entitled "SURGICAL INSTRUMENTWITH MULTIPLE PROGRAM RESPONSES DURING A FIRING MOTION" entitled "SURGICAL INSTRUMENTWITH MULTIPLE PROGRAM RESPONSES DURING A FIRING MOTION";
-名称为“具有可构造操作模式的模块化外科器械(MODULAR SURGICALINSTRUMENT WITH CONFIGURABLE OPERATING MODE)”的美国专利申请序列号15/130,581;- US Patent Application Serial No. 15/130,581 entitled "MODULAR SURGICALINSTRUMENT WITH CONFIGURABLE OPERATING MODE";
-名称为“用于控制外科缝合和切割器械的系统和方法(SYSTEMS AND METHODSFOR CONTROLLING A SURGICAL STAPLING AND CUTTING INSTRUMENT)”的美国专利申请序列号15/130,590;以及- US Patent Application Serial No. 15/130,590 entitled "SYSTEMS AND METHODSFOR CONTROLLING A SURGICAL STAPLING AND CUTTING INSTRUMENT"; and
-名称为“用于控制外科缝合和切割器械的系统和方法(SYSTEMS AND METHODSFOR CONTROLLING A SURGICAL STAPLING AND CUTTING INSTRUMENT)”的美国专利申请序列号15/130,596。- US Patent Application Serial No. 15/130,596 entitled "SYSTEMS AND METHODSFOR CONTROLLING A SURGICAL STAPLING AND CUTTING INSTRUMENT".
本申请的申请人拥有以下美国专利申请,这些申请于2016年4月1日提交,并且各自以引用方式全文并入本文:The applicant of the present application has the following US patent applications, which were filed on April 1, 2016, and each of which is hereby incorporated by reference in its entirety:
-名称为“用于操作外科缝合系统的方法(METHOD FOR OPERATING A SURGICALSTAPLING SYSTEM)”的美国专利申请序列号15/089,325;- US Patent Application Serial No. 15/089,325 entitled "METHOD FOR OPERATING A SURGICAL STAPLING SYSTEM";
-名称为“包括显示器的模块化外科缝合系统(MODULAR SURGICAL STAPLINGSYSTEM COMPRISING A DISPLAY)”的美国专利申请序列号15/089,321;- US Patent Application Serial No. 15/089,321 entitled "MODULAR SURGICAL STAPLING SYSTEM COMPRISING A DISPLAY";
-名称为“包括包括可重复显示区域的显示器的外科缝合系统(SURGICALSTAPLING SYSTEM COMPRISING A DISPLAY INCLUDING A RE-ORIENTABLE DISPLAYFIELD)”的美国专利申请序列号15/089,326;- US Patent Application Serial No. 15/089,326 entitled "SURGICAL STAPLING SYSTEM COMPRISING A DISPLAY INCLUDING A RE-ORIENTABLE DISPLAY FIELD" entitled "SURGICAL STAPLING SYSTEM COMPRISING A DISPLAY INCLUDING A RE-ORIENTABLE DISPLAY FIELD";
-名称为“具有可重新构造的夹持部分的外科器械柄部组件(SURGICALINSTRUMENT HANDLE ASSEMBLY WITH RECONFIGURABLE GRIP PORTION)”美国专利申请序列号15/089,263;- US Patent Application Serial No. 15/089,263 entitled "SURGICAL INSTRUMENT HANDLE ASSEMBLY WITH RECONFIGURABLE GRIP PORTION" entitled "SURGICAL INSTRUMENT HANDLE ASSEMBLY WITH RECONFIGURABLE GRIP PORTION";
-名称为“具有可手动致动的应急系统的旋转电动外科器械(ROTARY POWEREDSURGICAL INSTRUMENT WITH MANUALLY ACTUATABLE BAILOUT SYSTEM)”美国专利申请序列号15/089,262;- US Patent Application Serial No. 15/089,262 entitled "ROTARY POWEREDSURGICAL INSTRUMENT WITH MANUALLY ACTUATABLE BAILOUT SYSTEM";
-名称为“具有砧座驱动构件的外科切割和缝合端部执行器(SURGICAL CUTTINGAND STAPLING END EFFECTOR WITH ANVIL CONCENTRIC DRIVE MEMBER)”的美国专利申请序列号15/089,277;- US Patent Application Serial No. 15/089,277 entitled "SURGICAL CUTTINGAND STAPLING END EFFECTOR WITH ANVIL CONCENTRIC DRIVE MEMBER";
-名称为“用于具有分离和不同的击发轴的外科切割和缝合设备的闭合系统布置(CLOSURE SYSTEM ARRANGEMENTS FOR SURGICAL CUTTING AND STAPLING DEVICES WITHSEPARATE AND DISTINCT FIRING SHAFTS)”美国专利申请序列号15/089,283;- US Patent Application Serial No. 15/089,283 entitled "CLOSURE SYSTEM ARRANGEMENTS FOR SURGICAL CUTTING AND STAPLING DEVICES WITHSEPARATE AND DISTINCT FIRING SHAFTS" entitled "CLOSURE SYSTEM ARRANGEMENTS FOR SURGICAL CUTTING AND STAPLING DEVICES WITHSEPARATE AND DISTINCT FIRING SHAFTS";
-名称为“具有能够选择性地围绕轴轴线旋转的外科端部执行器的可互换的外科工具组件(INTERCHANGEABLE SURGICAL TOOL ASSEMBLY WITH A SURGICAL END EFFECTORTHAT IS SELECTIVELY ROTATABLE ABOUT A SHAFT AXIS)”美国专利申请序列号15/089,296;- US Patent Application Serial entitled "INTERCHANGEABLE SURGICAL TOOL ASSEMBLY WITH A SURGICAL END EFFECTORTHAT IS SELECTIVELY ROTATABLE ABOUT A SHAFT AXIS" No. 15/089,296;
-名称为“包括可移位传输的外科缝合系统(SURGICAL STAPLING SYSTEMCOMPRISING A SHIFTABLE TRANSMISSION)”的美国专利申请序列号15/089,258;- US Patent Application Serial No. 15/089,258 entitled "SURGICAL STAPLING SYSTEM COMPRISING A SHIFTABLE TRANSMISSION";
-名称为“被构造成能够提供组织的选择性切割的外科缝合系统(SURGICALSTAPLING SYSTEM COMPRISING A SHIFTABLE TRANSMISSION)”的美国专利申请序列号15/089,278;- US Patent Application Serial No. 15/089,278 entitled "SURGICAL STAPLING SYSTEM COMPRISING A SHIFTABLE TRANSMISSION";
-名称为“包括可仿形轴的外科分缝合系统(SURGICAL STAPLING SYSTEMCOMPRISING A CONTOURABLE SHAFT)”的美国专利申请序列号15/089,284;- US Patent Application Serial No. 15/089,284 entitled "SURGICAL STAPLING SYSTEMCOMPRISING A CONTOURABLE SHAFT";
-名称为“包括组织压缩闭锁件的外科缝合系统(SURGICAL STAPLING SYSTEMCOMPRISING A TISSUE COMPRESSION LOCKOUT)”的美国专利申请序列号15/089,295;- US Patent Application Serial No. 15/089,295 entitled "SURGICAL STAPLING SYSTEMCOMPRISING A TISSUE COMPRESSION LOCKOUT";
-名称为“包括未夹紧闭锁件的外科缝合系统(SURGICAL STAPLING SYSTEMCOMPRISING AN UNCLAMPING LOCKOUT)”美国专利申请序列号15/089,300;- US Patent Application Serial No. 15/089,300 entitled "SURGICAL STAPLING SYSTEMCOMPRISING AN UNCLAMPING LOCKOUT" entitled "SURGICAL STAPLING SYSTEMCOMPRISING AN UNCLAMPING LOCKOUT";
-名称为“包括夹具闭合闭锁件的外科缝合系统(SURGICAL STAPLING SYSTEMCOMPRISING A JAW CLOSURE LOCKOUT)”的美国专利申请序列号15/089,196;- US Patent Application Serial No. 15/089,196 entitled "SURGICAL STAPLING SYSTEMCOMPRISING A JAW CLOSURE LOCKOUT";
-名称为“包括夹具附接闭锁件的外科缝合系统(SURGICAL STAPLING SYSTEMCOMPRISING A JAW ATTACHMENT LOCKOUT)”的美国专利申请序列号15/089,203;- US Patent Application Serial No. 15/089,203 entitled "SURGICAL STAPLING SYSTEMCOMPRISING A JAW ATTACHMENT LOCKOUT";
-名称为“包括用尽的仓闭锁件的外科缝合系统(SURGICAL STAPLING SYSTEMCOMPRISING A SPENT CARTRIDGE LOCKOUT)”的美国专利申请序列号15/089,210;- US Patent Application Serial No. 15/089,210 entitled "SURGICAL STAPLING SYSTEMCOMPRISING A SPENT CARTRIDGE LOCKOUT";
-名称为“包括移位机构的外科器械(SURGICAL INSTRUMENT COMPRISING ASHIFTING MECHANISM)”的美国专利申请序列号15/089,324;- US Patent Application Serial No. 15/089,324 entitled "SURGICAL INSTRUMENT COMPRISING ASHIFTING MECHANISM";
-名称为“包括多个闭锁件的外科缝合器械(SURGICAL STAPLING INSTRUMENTCOMPRISING MULTIPLE LOCKOUTS)”的美国专利申请序列号15/089,335;- US Patent Application Serial No. 15/089,335 entitled "SURGICAL STAPLING INSTRUMENT COMPRISING MULTIPLE LOCKOUTS";
-名称为“外科缝合器械(SURGICAL STAPLING INSTRUMENT)”的美国专利申请序列号15/089,339;- US Patent Application Serial No. 15/089,339 entitled "SURGICAL STAPLING INSTRUMENT";
-名称为“被构造成能够应用具有不同高度的环形钉排的外科缝合系统(SURGICALSTAPLING SYSTEM CONFIGURED TO APPLY ANNULAR ROWS OF STAPLES HAVING DIFFERENTHEIGHTS)”的美国专利申请序列号15/089,253;- US Patent Application Serial No. 15/089,253 entitled "SURGICAL STAPLING SYSTEM CONFIGURED TO APPLY ANNULAR ROWS OF STAPLES HAVING DIFFERENTHEIGHTS";
-名称为“包括凹槽成形凹坑的外科缝合系统(SURGICAL STAPLING SYSTEMCOMPRISING A GROOVED FORMING POCKET)”的美国专利申请序列号15/089,304;- US Patent Application Serial No. 15/089,304 entitled "SURGICAL STAPLING SYSTEMCOMPRISING A GROOVED FORMING POCKET";
-名称为“用于外科缝合器的砧座修改构件(ANVIL MODIFICATION MEMBERS FORSURGICAL STAPLERS)”美国专利申请序列号15/089,331;- US Patent Application Serial No. 15/089,331 entitled "ANVIL MODIFICATION MEMBERS FORSURGICAL STAPLERS";
-名称为“具有无创伤特征的钉仓(STAPLE CARTRIDGES WITH ATRAUMATICFEATURES)”的美国专利申请序列号15/089,336;- US Patent Application Serial No. 15/089,336 entitled "STAPLE CARTRIDGES WITH ATRAUMATICFEATURES";
-名称为“包括可切入组织支撑件的圆形缝合系统(CIRCULAR STAPLING SYSTEMCOMPRISING AN INCISABLE TISSUE SUPPORT)”美国专利申请序列号15/089,312;- US Patent Application Serial No. 15/089,312 entitled "CIRCULAR STAPLING SYSTEMCOMPRISING AN INCISABLE TISSUE SUPPORT" entitled "CIRCULAR STAPLING SYSTEMCOMPRISING AN INCISABLE TISSUE SUPPORT";
-名称为“包括旋转击发系统的圆形缝合系统(CIRCULAR STAPLING SYSTEMCOMPRISING ROTARY FIRING SYSTEM)”的美国专利申请序列号15/089,309;以及- US Patent Application Serial No. 15/089,309 entitled "CIRCULAR STAPLING SYSTEMCOMPRISING ROTARY FIRING SYSTEM"; and
-名称为“包括负载控制的圆形缝合系统(CIRCULAR STAPLING SYSTEMCOMPRISING LOAD CONTROL)”美国专利申请序列号15/089,349;- US Patent Application Serial No. 15/089,349 entitled "CIRCULAR STAPLING SYSTEMCOMPRISING LOAD CONTROL";
本申请的申请人还拥有下面识别的美国专利申请,这些申请于2015年12月31日提交,其各自以引用方式全文并入本文:The applicant of the present application also owns the following identified US patent applications, filed on December 31, 2015, each of which is incorporated herein by reference in its entirety:
-名称为“用于补偿电动外科器械中的电池组故障的机构(MECHANISMS FORCOMPENSATING FOR BATTERY PACK FAILURE IN POWERED SURGICAL INSTRUMENTS)”的美国专利申请序列号14/984,488;- US Patent Application Serial No. 14/984,488 entitled "MECHANISMS FORCOMPENSATING FOR BATTERY PACK FAILURE IN POWERED SURGICAL INSTRUMENTS";
-名称为“用于补偿电动外科器械中的驱动系故障的机构(MECHANISMS FORCOMPENSATING FOR DRIVETRAIN FAILURE IN POWERED SURGICAL INSTRUMENTS)”美国专利申请序列号14/984,525;以及- US Patent Application Serial No. 14/984,525 entitled "MECHANISMS FORCOMPENSATING FOR DRIVETRAIN FAILURE IN POWERED SURGICAL INSTRUMENTS" entitled "MECHANISMS FORCOMPENSATING FOR DRIVETRAIN FAILURE IN POWERED SURGICAL INSTRUMENTS"; and
-名称为“具有可分离马达和马达控制电路的外科器械(SURGICAL INSTRUMENTSWITH SEPARABLE MOTORS AND MOTOR CONTROL CIRCUITS)”的美国专利申请序列号14/984,552。- US Patent Application Serial No. 14/984,552 entitled "SURGICAL INSTRUMENTSWITH SEPARABLE MOTORS AND MOTOR CONTROL CIRCUITS".
本申请的申请人还拥有下面识别的美国专利申请,这些申请于2016年2月9日提交,各自以引用方式全文并入本文:The applicant of the present application also owns the following identified US patent applications, which were filed on February 9, 2016, each of which is hereby incorporated by reference in its entirety:
-名称为“具有关节运动的和可轴向平移的端部执行器的外科器械(SURGICALINSTRUMENT WITH ARTICULATING AND AXILEY TRANSLATABLE END EFFECTOR)”的美国专利申请序列号15/019,220;- US Patent Application Serial No. 15/019,220 entitled "SURGICAL INSTRUMENT WITH ARTICULATING AND AXILEY TRANSLATABLE END EFFECTOR";
-名称为“具有多个链接关节运动布置的外科器械(SURGICAL INSTRUMENTS WITHMULTIPLE LINK ARTICULATION ARRANGEMENTS)”的美国专利申请序列号15/019,228;- US Patent Application Serial No. 15/019,228 entitled "SURGICAL INSTRUMENTS WITH MULTIPLE LINK ARTICULATION ARRANGEMENTS";
-名称为“具有狭缝次级约束的外科器械关节运动机构(SURGICAL INSTRUMENTARTICULATION MECHANISM WITH SLOTTED SECONDARY CONSTRAINT)”的美国专利申请序列号15/019,196;- US Patent Application Serial No. 15/019,196 entitled "SURGICAL INSTRUMENTARTICULATION MECHANISM WITH SLOTTED SECONDARY CONSTRAINT";
-名称为“具有相对于细长轴组件可高度关节运动的端部执行器的外科器械(SURGICAL INSTRUMENTS WITH AN END EFFECTOR THAT IS HIGHLY ARTICULATABLERELATIVE TO AN ELONGATE SHAFT ASSEMBLY)”的美国专利申请序列号15/019,206;- US Patent Application Serial No. 15/019,206 entitled "SURGICAL INSTRUMENTS WITH AN END EFFECTOR THAT IS HIGHLY ARTICULATABLE RELATIVE TO AN ELONGATE SHAFT ASSEMBLY" ;
-名称为“具有非对称关节运动布置的外科器械(SURGICAL INSTRUMENTS WITHNON-SYMMETRICAL ARTICULATION ARRANGEMENTS)”的美国专利申请序列号15/019,215;- US Patent Application Serial No. 15/019,215 entitled "SURGICAL INSTRUMENTS WITHNON-SYMMETRICAL ARTICULATION ARRANGEMENTS";
-名称为“具有单一关节运动链接布置的可关节运动的外科器械(ARTICULATABLESURGICAL INSTRUMENTS WITH SINGLE ARTICULATION LINK ARRANGEMENTS)”的美国专利申请序列号15/019,227;- US Patent Application Serial No. 15/019,227 entitled "ARTICULATABLESURGICAL INSTRUMENTS WITH SINGLE ARTICULATION LINK ARRANGEMENTS";
-名称为“具有用于电缆驱动的关节运动系统的张紧布置的外科器械(SURGICALINSTRUMENTS WITH TENSIONING ARRANGEMENTS FOR CABLE DRIVEN ARTICULATIONSYSTEMS)”的美国专利申请序列号15/019,235;- US Patent Application Serial No. 15/019,235 entitled "SURGICAL INSTRUMENTS WITH TENSIONING ARRANGEMENTS FOR CABLE DRIVEN ARTICULATION SYSTEMS";
-名称为“具有离轴击发束布置的可关节运动外科器械(ARTICULATABLE SURGICALINSTRUMENTS WITH OFF-AXIS FIRING BEAM ARRANGEMENTS)”的美国专利申请序列号15/019,230;以及- US Patent Application Serial No. 15/019,230 entitled "ARTICULATABLE SURGICALINSTRUMENTS WITH OFF-AXIS FIRING BEAM ARRANGEMENTS"; and
-名称为“具有闭合冲程还原布置的外科器械(SURGICAL INSTRUMENTS WITHCLOSURE STROKE REDUCTION ARRANGEMENTS)”的美国专利申请序列号15/019,245。- US Patent Application Serial No. 15/019,245 entitled "SURGICAL INSTRUMENTS WITH CLOSURE STROKE REDUCTION ARRANGEMENTS".
本申请的申请人还拥有下面识别的美国专利申请,这些申请于2016年2月12日提交,各自以引用方式全文并入本文:The applicant of the present application also owns the following identified US patent applications, which were filed on February 12, 2016, each of which is hereby incorporated by reference in its entirety:
-名称为“用于补偿电动外科器械中的驱动系故障的机构(MECHANISMS FORCOMPENSATING FOR DRIVETRAIN FAILURE IN POWERED SURGICAL INSTRUMENTS)”的美国专利申请序列号15/043,254;- US Patent Application Serial No. 15/043,254 entitled "MECHANISMS FORCOMPENSATING FOR DRIVETRAIN FAILURE IN POWERED SURGICAL INSTRUMENTS";
-名称为“用于补偿电动外科器械中的驱动系故障的机构(MECHANISMS FORCOMPENSATING FOR DRIVETRAIN FAILURE IN POWERED SURGICAL INSTRUMENTS)”的美国专利申请序列号15/043,259;- US Patent Application Serial No. 15/043,259 entitled "MECHANISMS FORCOMPENSATING FOR DRIVETRAIN FAILURE IN POWERED SURGICAL INSTRUMENTS";
-名称为“用于补偿电动外科器械中的驱动系故障的机构(MECHANISMS FORCOMPENSATING FOR DRIVETRAIN FAILURE IN POWERED SURGICAL INSTRUMENTS)”的美国专利申请序列号15/043,275;以及- US Patent Application Serial No. 15/043,275 entitled "MECHANISMS FORCOMPENSATING FOR DRIVETRAIN FAILURE IN POWERED SURGICAL INSTRUMENTS"; and
-名称为“用于补偿电动外科器械中的驱动系故障的机构(MECHANISMS FORCOMPENSATING FOR DRIVETRAIN FAILURE IN POWERED SURGICAL INSTRUMENTS)”的美国专利申请序列号15/043,289。- US Patent Application Serial No. 15/043,289 entitled "MECHANISMS FORCOMPENSATING FOR DRIVETRAIN FAILURE IN POWERED SURGICAL INSTRUMENTS".
本申请的申请人拥有2015年6月18日提交并且各自全文以引用方式并入本文的以下专利申请:The applicant of the present application has the following patent applications filed on June 18, 2015 and each of which is incorporated herein by reference in its entirety:
-名称为“SURGICAL END EFFECTORS WITH POSITIVE JAW OPENINGARRANGEMENTS”的美国专利申请序列号14/742,925;- US Patent Application Serial No. 14/742,925 entitled "SURGICAL END EFFECTORS WITH POSITIVE JAW OPENINGARRANGEMENTS";
-名称为“SURGICAL END EFFECTORS WITH DUAL CAM ACTUATED JAW CLOSINGFEATURES”的美国专利申请序列号14/742,941;- US Patent Application Serial No. 14/742,941 entitled "SURGICAL END EFFECTORS WITH DUAL CAM ACTUATED JAW CLOSINGFEATURES";
-名称为“MOVABLE FIRING BEAM SUPPORT ARRANGEMENTS FOR ARTICULATABLESURGICAL INSTRUMENTS”的美国专利申请序列号14/742,914;- US Patent Application Serial No. 14/742,914 entitled "MOVABLE FIRING BEAM SUPPORT ARRANGEMENTS FOR ARTICULATABLESURGICAL INSTRUMENTS";
-名称为“ARTICULATABLE SURGICAL INSTRUMENTS WITH COMPOSITE FIRING BEAMSTRUCTURES WITH CENTER FIRING SUPPORT MEMBER FOR ARTICULATION SUPPORT”的美国专利申请序列号14/742,900;- US Patent Application Serial No. 14/742,900 entitled "ARTICULATABLE SURGICAL INSTRUMENTS WITH COMPOSITE FIRING BEAMSTRUCTURES WITH CENTER FIRING SUPPORT MEMBER FOR ARTICULATION SUPPORT";
-名称为“用于可进行关节运动的外科器械的双关节运动驱动系统布置(DUALARTICULATION DRIVE SYSTEM ARRANGEMENTS FOR ARTICULATABLE SURGICALINSTRUMENTS)”的美国专利申请序列号14/742,885;以及- US Patent Application Serial No. 14/742,885 entitled "DUALARTICULATION DRIVE SYSTEM ARRANGEMENTS FOR ARTICULATABLE SURGICALINSTRUMENTS"; and
-名称为“PUSH/PULL ARTICULATION DRIVE SYSTEMS FOR ARTICULATABLESURGICAL INSTRUMENTS”的美国专利申请序列号14/742,876。- US Patent Application Serial No. 14/742,876 entitled "PUSH/PULL ARTICULATION DRIVE SYSTEMS FOR ARTICULATABLESURGICAL INSTRUMENTS".
本申请的申请人拥有2015年3月6日提交并且各自全文以引用方式并入本文的以下专利申请:The applicant of the present application has the following patent applications filed on March 6, 2015, each of which is incorporated herein by reference in its entirety:
-名称为“POWERED SURGICAL INSTRUMENT”的美国专利申请序列号14/640,746;- US Patent Application Serial No. 14/640,746 entitled "POWERED SURGICAL INSTRUMENT";
-名称为“MULTIPLE LEVEL THRESHOLDS TO MODIFY OPERATION OF POWEREDSURGICAL INSTRUMENTS”的美国专利申请序列号14/640,795;- US Patent Application Serial No. 14/640,795 entitled "MULTIPLE LEVEL THRESHOLDS TO MODIFY OPERATION OF POWEREDSURGICAL INSTRUMENTS";
-名称为“ADAPTIVE TISSUE COMPRESSION TECHNIQUES TO ADJUST CLOSURERATES FOR MULTIPLE TISSUE TYPES”的美国专利申请序列号14/640,832;代理人案卷号END7557USNP/140482;- US Patent Application Serial No. 14/640,832 entitled "ADAPTIVE TISSUE COMPRESSION TECHNIQUES TO ADJUST CLOSURERATES FOR MULTIPLE TISSUE TYPES"; Attorney's Docket No. END7557USNP/140482;
-名称为“OVERLAID MULTI SENSOR RADIO FREQUENCY(RF)ELECTRODE SYSTEM TOMEASURE TISSUE COMPRESSION”的美国专利申请序列号14/640,935;- US Patent Application Serial No. 14/640,935 entitled "OVERLAID MULTI SENSOR RADIO FREQUENCY (RF) ELECTRODE SYSTEM TOMEASURE TISSUE COMPRESSION";
-名称为“MONITORING SPEED CONTROL AND PRECISION INCREMENTING OF MOTORFOR POWERED SURGICAL INSTRUMENTS”的美国专利申请序列号14/640,831;- US Patent Application Serial No. 14/640,831 entitled "MONITORING SPEED CONTROL AND PRECISION INCREMENTING OF MOTORFOR POWERED SURGICAL INSTRUMENTS";
-名称为“TIME DEPENDENT EVALUATION OF SENSOR DATA TO DETERMINESTABILITY,CREEP,AND VISCOELASTIC ELEMENTS OF MEASURES”的美国专利申请序列号14/640,859;- US Patent Application Serial No. 14/640,859 entitled "TIME DEPENDENT EVALUATION OF SENSOR DATA TO DETERMINESTABILITY, CREEP, AND VISCOELASTIC ELEMENTS OF MEASURES";
-名称为“INTERACTIVE FEEDBACK SYSTEM FOR POWERED SURGICAL INSTRUMENTS”的美国专利申请序列号14/640,817;- US Patent Application Serial No. 14/640,817 entitled "INTERACTIVE FEEDBACK SYSTEM FOR POWERED SURGICAL INSTRUMENTS";
-名称为“CONTROL TECHNIQUES AND SUB-PROCESSOR CONTAINED WITHIN MODULARSHAFT WITH SELECT CONTROL PROCESSING FROM HANDLE”的美国专利申请序列号14/640,844;- US Patent Application Serial No. 14/640,844 entitled "CONTROL TECHNIQUES AND SUB-PROCESSOR CONTAINED WITHIN MODULARSHAFT WITH SELECT CONTROL PROCESSING FROM HANDLE";
-名称为“SMART SENSORS WITH LOCAL SIGNAL PROCESSING”的美国专利申请序列号14/640,837;- US Patent Application Serial No. 14/640,837 entitled "SMART SENSORS WITH LOCAL SIGNAL PROCESSING";
-名称为“SYSTEM FOR DETECTING THE MIS-INSERTION OF A STAPLE CARTRIDGEINTO A SURGICAL STAPLER”的美国专利申请序列号14/640,765;- US Patent Application Serial No. 14/640,765 entitled "SYSTEM FOR DETECTING THE MIS-INSERTION OF A STAPLE CARTRIDGEINTO A SURGICAL STAPLER";
-名称为“SIGNAL AND POWER COMMUNICATION SYSTEM POSITIONED ON AROTATABLE SHAFT”的美国专利申请序列号14/640,799;以及- US Patent Application Serial No. 14/640,799 entitled "SIGNAL AND POWER COMMUNICATION SYSTEM POSITIONED ON AROTATABLE SHAFT"; and
-名称为“SURGICAL INSTRUMENT COMPRISING A LOCKABLE BATTERY HOUSING”的美国专利申请序列号14/640,780。- US Patent Application Serial No. 14/640,780 entitled "SURGICAL INSTRUMENT COMPRISING A LOCKABLE BATTERY HOUSING".
本申请的申请人拥有2015年2月27日提交并且全文各自以引用的方式并入本文的以下专利申请:The applicant of the present application owns the following patent applications filed on February 27, 2015 and each of which is hereby incorporated by reference in its entirety:
-名称为“SURGICAL INSTRUMENT SYSTEM COMPRISING AN INSPECTION STATION”的美国专利申请序列号14/633,576;- US Patent Application Serial No. 14/633,576 entitled "SURGICAL INSTRUMENT SYSTEM COMPRISING AN INSPECTION STATION";
-名称为“SURGICAL APPARATUS CONFIGURED TO ASSESS WHETHER A PERFORMANCEPARAMETER OF THE SURGICAL APPARATUS IS WITHIN AN ACCEPTABLE PERFORMANCE BAND”的美国专利申请序列号14/633,546;- US Patent Application Serial No. 14/633,546 entitled "SURGICAL APPARATUS CONFIGURED TO ASSESS WHETHER A PERFORMANCEPARAMETER OF THE SURGICAL APPARATUS IS WITHIN AN ACCEPTABLE PERFORMANCE BAND";
-名称为“SURGICAL CHARGING SYSTEM THAT CHARGES AND/OR CONDITIONS ONEOR MORE BATTERIES”的美国专利申请序列号14/633,576;- US Patent Application Serial No. 14/633,576 entitled "SURGICAL CHARGING SYSTEM THAT CHARGES AND/OR CONDITIONS ONEOR MORE BATTERIES";
-名称为“CHARGING SYSTEM THAT ENABLES EMERGENCY RESOLUTIONS FORCHARGING A BATTERY”的美国专利申请序列号14/633,566;- US Patent Application Serial No. 14/633,566 entitled "CHARGING SYSTEM THAT ENABLES EMERGENCY RESOLUTIONS FORCHARGING A BATTERY";
-名称为“SYSTEM FOR MONITORING WHETHER A SURGICAL INSTRUMENT NEEDS TOBE SERVICED”的美国专利申请序列号14/633,555;- US Patent Application Serial No. 14/633,555 entitled "SYSTEM FOR MONITORING WHETHER A SURGICAL INSTRUMENT NEEDS TOBE SERVICED";
-名称为“REINFORCED BATTERY FOR A SURGICAL INSTRUMENT”的美国专利申请序列号14/633,542;- US Patent Application Serial No. 14/633,542 entitled "REINFORCED BATTERY FOR A SURGICAL INSTRUMENT";
-名称为“POWER ADAPTER FOR A SURGICAL INSTRUMENT”的美国专利申请序列号14/633,548;- US Patent Application Serial No. 14/633,548 entitled "POWER ADAPTER FOR A SURGICAL INSTRUMENT";
-名称为“ADAPTABLE SURGICAL INSTRUMENT HANDLE”的美国专利申请序列号14/633,526;- US Patent Application Serial No. 14/633,526 entitled "ADAPTABLE SURGICAL INSTRUMENT HANDLE";
-名称为“MODULAR STAPLING ASSEMBLY”的美国专利申请序列号14/633,541;以及- US Patent Application Serial No. 14/633,541 entitled "MODULAR STAPLING ASSEMBLY"; and
-名称为“SURGICAL APPARATUS CONFIGURED TO TRACK AN END-OF-LIFEPARAMETER”的美国专利申请序列号14/633,562;- US Patent Application Serial No. 14/633,562 entitled "SURGICAL APPARATUS CONFIGURED TO TRACK AN END-OF-LIFEPARAMETER";
本申请的申请人拥有2014年12月18日提交并且各自全文以引用方式并入本文的以下专利申请:The applicant of the present application has the following patent applications filed on December 18, 2014 and each of which is incorporated herein by reference in its entirety:
-名称为“SURGICAL INSTRUMENT SYSTEMS COMPRISING AN ARTICULATABLE ENDEFFECTOR AND MEANS FOR ADJUSTING THE FIRING STROKE OF A FIRING”的美国专利申请序列号14/574,478;- US Patent Application Serial No. 14/574,478 entitled "SURGICAL INSTRUMENT SYSTEMS COMPRISING AN ARTICULATABLE ENDEFFECTOR AND MEANS FOR ADJUSTING THE FIRING STROKE OF A FIRING";
-名称为“SURGICAL INSTRUMENT ASSEMBLY COMPRISING LOCKABLE SYSTEMS”的美国专利申请序列号14/574,483;- US Patent Application Serial No. 14/574,483 entitled "SURGICAL INSTRUMENT ASSEMBLY COMPRISING LOCKABLE SYSTEMS";
-名称为“DRIVE ARRANGEMENTS FOR ARTICULATABLE SURGICAL INSTRUMENTS”的美国专利申请序列号14/575,139;- US Patent Application Serial No. 14/575,139 entitled "DRIVE ARRANGEMENTS FOR ARTICULATABLE SURGICAL INSTRUMENTS";
-名称为“LOCKING ARRANGEMENTS FOR DETACHABLE SHAFT ASSEMBLIES WITHARTICULATABLE SURGICAL END EFFECTORS”的美国专利申请序列号14/575,148;- US Patent Application Serial No. 14/575,148 entitled "LOCKING ARRANGEMENTS FOR DETACHABLE SHAFT ASSEMBLIES WITHARTICULATABLE SURGICAL END EFFECTORS";
-名称为“SURGICAL INSTRUMENT WITH AN ANVIL THAT IS SELECTIVELY MOVABLEABOUT A DISCRETE NON-MOVABLE AXIS RELATIVE TO A STAPLE CARTRIDGE”的美国专利申请序列号14/575,130;- US Patent Application Serial No. 14/575,130 entitled "SURGICAL INSTRUMENT WITH AN ANVIL THAT IS SELECTIVELY MOVABLEABOUT A DISCRETE NON-MOVABLE AXIS RELATIVE TO A STAPLE CARTRIDGE";
-名称为“SURGICAL INSTRUMENTS WITH IMPROVED CLOSURE ARRANGEMENTS”的美国专利申请序列号14/575,143;- US Patent Application Serial No. 14/575,143 entitled "SURGICAL INSTRUMENTS WITH IMPROVED CLOSURE ARRANGEMENTS";
-名称为“SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS ANDMOVABLE FIRING BEAM SUPPORT ARRANGEMENTS”的美国专利申请序列号14/575,117;- US Patent Application Serial No. 14/575,117 entitled "SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS ANDMOVABLE FIRING BEAM SUPPORT ARRANGEMENTS";
-名称为“SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS ANDIMPROVED FIRING BEAM SUPPORT ARRANGEMENTS”的美国专利申请序列号14/575,154;- US Patent Application Serial No. 14/575,154 entitled "SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS ANDIMPROVED FIRING BEAM SUPPORT ARRANGEMENTS";
-名称为“SURGICAL INSTRUMENT ASSEMBLY COMPRISING A FLEXIBLEARTICULATION SYSTEM”的美国专利申请序列号14/574,493;以及- US Patent Application Serial No. 14/574,493 entitled "SURGICAL INSTRUMENT ASSEMBLY COMPRISING A FLEXIBLEARTICULATION SYSTEM"; and
-名称为“SURGICAL INSTRUMENT ASSEMBLY COMPRISING A LOCKABLEARTICULATION SYSTEM”的美国专利申请序列号14/574,500。- US Patent Application Serial No. 14/574,500 entitled "SURGICAL INSTRUMENT ASSEMBLY COMPRISING A LOCKABLEARTICULATION SYSTEM".
本申请的申请人拥有2013年3月1日提交并且各自全文以引用方式并入本文的以下专利申请:The applicant of the present application has the following patent applications filed on March 1, 2013 and each of which is incorporated herein by reference in its entirety:
-名称为“Articulatable Surgical Instruments With Conductive PathwaysFor Signal Communication”的美国专利申请序列号13/782,295,现为美国专利申请公布2014/0246471;- US Patent Application Serial No. 13/782,295 entitled "Articulatable Surgical Instruments With Conductive Pathways For Signal Communication", now US Patent Application Publication 2014/0246471;
-名称为“Rotary Powered Articulation Joints For Surgical Instruments”的美国专利申请序列号13/782,323,现为美国专利申请公布2014/0246472;- US Patent Application Serial No. 13/782,323 entitled "Rotary Powered Articulation Joints For Surgical Instruments", now US Patent Application Publication 2014/0246472;
-名称为“Thumbwheel Switch Arrangements For Surgical Instruments”的美国专利申请序列号13/782,338,现为美国专利申请公布2014/0249557;- US Patent Application Serial No. 13/782,338 entitled "Thumbwheel Switch Arrangements For Surgical Instruments", now US Patent Application Publication 2014/0249557;
-名称为“Electromechanical Surgical Device with Signal RelayArrangement”的美国专利申请序列号13/782,499,现为美国专利申请公布2014/0246474;- US Patent Application Serial No. 13/782,499 entitled "Electromechanical Surgical Device with Signal Relay Arrangement", now US Patent Application Publication 2014/0246474;
-名称为“Multiple Processor Motor Control for Modular SurgicalInstruments”的美国专利申请序列号13/782,460,现为美国专利申请公布2014/0246478;- US Patent Application Serial No. 13/782,460 entitled "Multiple Processor Motor Control for Modular Surgical Instruments", now US Patent Application Publication 2014/0246478;
-名称为“Joystick Switch Assemblies For Surgical Instruments”的美国专利申请序列号13/782,358,现为美国专利申请公布2014/0246477;- US Patent Application Serial No. 13/782,358 entitled "Joystick Switch Assemblies For Surgical Instruments", now US Patent Application Publication 2014/0246477;
-名称为“Sensor Straightened End Effector During Removal ThroughTrocar”的美国专利申请序列号13/782,481,现为美国专利申请公布2014/0246479;- US Patent Application Serial No. 13/782,481 entitled "Sensor Straightened End Effector During Removal ThroughTrocar", now US Patent Application Publication 2014/0246479;
-名称为“Control Methods for Surgical Instruments with RemovableImplement Portions”的美国专利申请序列号13/782,518,现为美国专利申请公布2014/0246475;- US Patent Application Serial No. 13/782,518 entitled "Control Methods for Surgical Instruments with RemovableImplement Portions", now US Patent Application Publication 2014/0246475;
-名称为“Rotary Powered Surgical Instruments With Multiple Degrees ofFreedom”的美国专利申请序列号13/782,375,现为美国专利申请公布2014/0246473;以及- US Patent Application Serial No. 13/782,375 entitled "Rotary Powered Surgical Instruments With Multiple Degrees of Freedom", now US Patent Application Publication 2014/0246473; and
-名称为“SURGICAL INSTRUMENT SOFT STOP”的美国专利申请序列号13/782,536,现为美国专利申请公布2014/0246476。- US Patent Application Serial No. 13/782,536 entitled "SURGICAL INSTRUMENT SOFT STOP", now US Patent Application Publication 2014/0246476.
本申请的申请人还拥有下面识别的美国专利申请,这些申请于2013年3月14日提交,各自以引用方式全文并入本文:The applicant of the present application also owns the following identified US patent applications, which were filed on March 14, 2013, each of which is hereby incorporated by reference in its entirety:
-名称为“ARTICULATABLE SURGICAL INSTRUMENT COMPRISING A FIRING DRIVE”的美国专利申请序列号13/803,097,现为美国专利申请公布2014/0263542;- US Patent Application Serial No. 13/803,097 entitled "ARTICULATABLE SURGICAL INSTRUMENT COMPRISING A FIRING DRIVE", now US Patent Application Publication 2014/0263542;
-名称为“CONTROL ARRANGEMENTS FOR A DRIVE MEMBER OF A SURGICALINSTRUMENT”的美国专利申请序列号13/803,193,现为美国专利申请公布2014/0263537;- US Patent Application Serial No. 13/803,193 entitled "CONTROL ARRANGEMENTS FOR A DRIVE MEMBER OF A SURGICALINSTRUMENT", now US Patent Application Publication 2014/0263537;
-名称为“INTERCHANGEABLE SHAFT ASSEMBLIES FOR USE WITH A SURGICALINSTRUMENT”的美国专利申请序列号13/803,053,现为美国专利申请公布2014/0263564;- US Patent Application Serial No. 13/803,053 entitled "INTERCHANGEABLE SHAFT ASSEMBLIES FOR USE WITH A SURGICALINSTRUMENT", now US Patent Application Publication 2014/0263564;
-名称为“ARTICULATABLE SURGICAL INSTRUMENT COMPRISING AN ARTICULATIONLOCK”的美国专利申请序列号13/803,086,现为美国专利申请公布2014/0263541;- US Patent Application Serial No. 13/803,086 entitled "ARTICULATABLE SURGICAL INSTRUMENT COMPRISING AN ARTICULATION LOCK", now US Patent Application Publication 2014/0263541;
-名称为“SENSOR ARRANGEMENTS FOR ABSOLUTE POSITIONING SYSTEM FORSURGICAL INSTRUMENTS”的美国专利申请序列号13/803,210,现为美国专利申请公布2014/0263538;- US Patent Application Serial No. 13/803,210 entitled "SENSOR ARRANGEMENTS FOR ABSOLUTE POSITIONING SYSTEM FORSURGICAL INSTRUMENTS", now US Patent Application Publication 2014/0263538;
-名称为“MULTI-FUNCTION MOTOR FOR A SURGICAL INSTRUMENT”的美国专利申请序列号13/803,148,现为美国专利申请公布2014/0263554;- US Patent Application Serial No. 13/803,148 entitled "MULTI-FUNCTION MOTOR FOR A SURGICAL INSTRUMENT", now US Patent Application Publication 2014/0263554;
-名称为“DRIVE SYSTEM LOCKOUT ARRANGEMENTS FOR MODULAR SURGICALINSTRUMENTS”的美国专利申请序列号13/803,066,现为美国专利申请公布2014/0263565;- US Patent Application Serial No. 13/803,066 entitled "DRIVE SYSTEM LOCKOUT ARRANGEMENTS FOR MODULAR SURGICALINSTRUMENTS", now US Patent Application Publication 2014/0263565;
-名称为“ARTICULATION CONTROL SYSTEM FOR ARTICULATABLE SURGICALINSTRUMENTS”的美国专利申请序列号13/803,117,现为美国专利申请公布2014/0263553;- US Patent Application Serial No. 13/803,117 entitled "ARTICULATION CONTROL SYSTEM FOR ARTICULATABLE SURGICALINSTRUMENTS", now US Patent Application Publication 2014/0263553;
-名称为“DRIVE TRAIN CONTROL ARRANGEMENTS FOR MODULAR SURGICALINSTRUMENTS”的美国专利申请序列号13/803,130,现为美国专利申请公布2014/0263543;以及- US Patent Application Serial No. 13/803,130 entitled "DRIVE TRAIN CONTROL ARRANGEMENTS FOR MODULAR SURGICALINSTRUMENTS", now US Patent Application Publication 2014/0263543; and
-名称为“METHOD AND SYSTEM FOR OPERATING A SURGICAL INSTRUMENT”的美国专利申请序列号13/803,159,现为美国专利申请公布2014/0277017。- US Patent Application Serial No. 13/803,159 entitled "METHOD AND SYSTEM FOR OPERATING A SURGICAL INSTRUMENT", now US Patent Application Publication 2014/0277017.
本申请的申请人还拥有2014年3月7日提交并且全文以引用方式并入本文的以下专利申请:The applicant of the present application also owns the following patent application filed on March 7, 2014 and incorporated herein by reference in its entirety:
-名称为“CONTROL SYSTEMS FOR SURGICAL INSTRUMENTS”的美国专利申请序列号14/200,111,现为美国专利申请公布2014/0263539。- US Patent Application Serial No. 14/200,111 entitled "CONTROL SYSTEMS FOR SURGICAL INSTRUMENTS", now US Patent Application Publication 2014/0263539.
本申请的申请人还拥有2014年3月26日提交并且各自全文以引用方式并入本文的以下专利申请:The applicant of the present application also owns the following patent applications filed on March 26, 2014 and each of which is hereby incorporated by reference in its entirety:
-名称为“POWER MANAGEMENT CONTROL SYSTEMS FOR SURGICAL INSTRUMENTS”的美国专利申请序列号14/226,106,现为美国专利申请公布2015/0272582;- US Patent Application Serial No. 14/226,106 entitled "POWER MANAGEMENT CONTROL SYSTEMS FOR SURGICAL INSTRUMENTS", now US Patent Application Publication 2015/0272582;
-名称为“STERILIZATION VERIFICATION CIRCUIT”的美国专利申请序列号14/226,099,现为美国专利申请公布2015/0272581;- US Patent Application Serial No. 14/226,099 entitled "STERILIZATION VERIFICATION CIRCUIT", now US Patent Application Publication 2015/0272581;
-名称为“VERIFICATION OF NUMBER OF BATTERY EXCHANGES/PROCEDURE COUNT”的美国专利申请序列号14/226,094,现为美国专利申请公布2015/0272580;- US Patent Application Serial No. 14/226,094 entitled "VERIFICATION OF NUMBER OF BATTERY EXCHANGES/PROCEDURE COUNT", now US Patent Application Publication 2015/0272580;
-名称为“POWER MANAGEMENT THROUGH SLEEP OPTIONS OF SEGMENTED CIRCUITAND WAKE UP CONTROL”的美国专利申请序列号14/226,117,现为美国专利申请公布2015/0272574;- US Patent Application Serial No. 14/226,117 entitled "POWER MANAGEMENT THROUGH SLEEP OPTIONS OF SEGMENTED CIRCUITAND WAKE UP CONTROL", now US Patent Application Publication 2015/0272574;
-名称为“MODULAR POWERED SURGICAL INSTRUMENT WITH DETACHABLE SHAFTASSEMBLIES”的美国专利申请序列号14/226,075,现为美国专利申请公布2015/0272579;- US Patent Application Serial No. 14/226,075 entitled "MODULAR POWERED SURGICAL INSTRUMENT WITH DETACHABLE SHAFTASSEMBLIES", now US Patent Application Publication 2015/0272579;
-名称为“FEEDBACK ALGORITHMS FOR MANUAL BAILOUT SYSTEMS FOR SURGICALINSTRUMENTS”的美国专利申请序列号14/226,093,现为美国专利申请公布2015/0272569;- US Patent Application Serial No. 14/226,093 entitled "FEEDBACK ALGORITHMS FOR MANUAL BAILOUT SYSTEMS FOR SURGICALINSTRUMENTS", now US Patent Application Publication 2015/0272569;
-名称为“SURGICAL INSTRUMENT UTILIZING SENSOR ADAPTATION”的美国专利申请序列号14/226,116,现为美国专利申请公布2015/0272571;- US Patent Application Serial No. 14/226,116 entitled "SURGICAL INSTRUMENT UTILIZING SENSOR ADAPTATION", now US Patent Application Publication 2015/0272571;
-名称为“SURGICAL INSTRUMENT CONTROL CIRCUIT HAVING A SAFETYPROCESSOR”的美国专利申请序列号14/226,071,现为美国专利申请公布2015/0272578;- US Patent Application Serial No. 14/226,071 entitled "SURGICAL INSTRUMENT CONTROL CIRCUIT HAVING A SAFETYPROCESSOR", now US Patent Application Publication 2015/0272578;
-名称为“SURGICAL INSTRUMENT COMPRISING INTERACTIVE SYSTEMS”的美国专利申请序列号14/226,097,现为美国专利申请公布2015/0272570;- US Patent Application Serial No. 14/226,097 entitled "SURGICAL INSTRUMENT COMPRISING INTERACTIVE SYSTEMS", now US Patent Application Publication 2015/0272570;
-名称为“INTERFACE SYSTEMS FOR USE WITH SURGICAL INSTRUMENTS”的美国专利申请序列号14/226,126,现为美国专利申请公布2015/0272572;- US Patent Application Serial No. 14/226,126 entitled "INTERFACE SYSTEMS FOR USE WITH SURGICAL INSTRUMENTS", now US Patent Application Publication 2015/0272572;
-名称为“MODULAR SURGICAL INSTRUMENT SYSTEM”的美国专利申请序列号14/226,133,现为美国专利申请公布2015/0272557;- US Patent Application Serial No. 14/226,133 entitled "MODULAR SURGICAL INSTRUMENT SYSTEM", now US Patent Application Publication 2015/0272557;
-名称为“SYSTEMS AND METHODS FOR CONTROLLING A SEGMENTED CIRCUIT”的美国专利申请序列号14/226,081,现为美国专利申请公布2015/0277471;- US Patent Application Serial No. 14/226,081 entitled "SYSTEMS AND METHODS FOR CONTROLLING A SEGMENTED CIRCUIT", now US Patent Application Publication 2015/0277471;
-名称为“POWER MANAGEMENT THROUGH SEGMENTED CIRCUIT AND VARIABLEVOLTAGE PROTECTION”的美国专利申请序列号14/226,076,现为美国专利申请公布2015/0280424;- US Patent Application Serial No. 14/226,076 entitled "POWER MANAGEMENT THROUGH SEGMENTED CIRCUIT AND VARIABLEVOLTAGE PROTECTION", now US Patent Application Publication 2015/0280424;
-名称为“SURGICAL STAPLING INSTRUMENT SYSTEM”的美国专利申请序列号14/226,111,现为美国专利申请公布2015/0272583;以及- US Patent Application Serial No. 14/226,111 entitled "SURGICAL STAPLING INSTRUMENT SYSTEM", now US Patent Application Publication 2015/0272583; and
-名称为“SURGICAL INSTRUMENT COMPRISING A ROTATABLE SHAFT”的美国专利申请序列号14/226,125,现为美国专利申请公布2015/0280384。- US Patent Application Serial No. 14/226,125 entitled "SURGICAL INSTRUMENT COMPRISING A ROTATABLE SHAFT", now US Patent Application Publication 2015/0280384.
本申请的申请人还拥有2014年9月5日提交并且全文各自以引用的方式并入本文的以下专利申请:The applicant of the present application also owns the following patent applications filed on September 5, 2014 and each of which is hereby incorporated by reference in its entirety:
-名称为“用于电动医疗设备的电路和传感器(CIRCUITRY AND SENSORS FORPOWERED MEDICAL DEVICE)”的美国专利申请序列号14/479,103,现为美国专利申请公布号2016/0066912;- US Patent Application Serial No. 14/479,103 entitled "CIRCUITRY AND SENSORS FORPOWERED MEDICAL DEVICE", now US Patent Application Publication No. 2016/0066912;
-名称为“具有集成传感器以量化组织压缩的附属物(ADJUNCT WITH INTEGRATEDSENSORS TO QUANTIFY TISSUE COMPRESSION)”美国专利申请序列号14/479,119,现为美国专利申请公开号2016/0066914;- US Patent Application Serial No. 14/479,119 entitled "ADJUNCT WITH INTEGRATEDSENSORS TO QUANTIFY TISSUE COMPRESSION", now US Patent Application Publication No. 2016/0066914;
-名称为“基于部件评估的监测设备降级(MONITORING DEVICE DEGRADATIONBASED ON COMPONENT EVALUATION)”的美国专利申请序列号14/478,908,现在为美国专利申请公布号2016/0066910;- US Patent Application Serial No. 14/478,908 entitled "MONITORING DEVICE DEGRADATIONBASED ON COMPONENT EVALUATION", now US Patent Application Publication No. 2016/0066910;
-名称为“具有影响第二传感器输出或判读的一个传感器的多个传感器(MULTIPLESENSORS WITH ONE SENSOR AFFECTING A SECOND SENSOR'S OUTPUT ORINTERPRETATION)”的美国专利申请序列号14/478,895,现在为美国专利申请公布号2016/0066909;- US Patent Application Serial No. 14/478,895 entitled "MULTIPLESENSORS WITH ONE SENSOR AFFECTING A SECOND SENSOR'S OUTPUT ORINTERPRETATION", now US Patent Application Publication No. 2016 /0066909;
-名称为“使用霍尔磁铁检测极性检测误装载仓(USE OF POLARITY OF HALLMAGNET DETECTION TO DETECT MISLOADED CARTRIDGE)”的美国专利申请序列号14/479,110,现在为美国专利申请公布号2016/0066915;- US Patent Application Serial No. 14/479,110 entitled "USE OF POLARITY OF HALLMAGNET DETECTION TO DETECT MISLOADED CARTRIDGE", now US Patent Application Publication No. 2016/0066915;
-名称为“智能仓唤醒操作和数据保留(SMART CARTRIDGE WAKE UP OPERATIONAND DATA RETENTION)”的美国专利申请序列号14/479,098,现在为美国专利申请公布号2016/0066911;- US Patent Application Serial No. 14/479,098 entitled "SMART CARTRIDGE WAKE UP OPERATION AND DATA RETENTION", now US Patent Application Publication No. 2016/0066911;
-名称为“用于电动医疗设备的多马达控制(MULTIPLE MOTOR CONTROL FORPOWERED MEDICAL DEVICE)”美国专利申请序列号14/479,115,现在为美国专利申请公布号2016/0066916;以及- US Patent Application Serial No. 14/479,115 entitled "MULTIPLE MOTOR CONTROL FORPOWERED MEDICAL DEVICE", now US Patent Application Publication No. 2016/0066916; and
-名称为“组织参数稳定的局部显示(LOCAL DISPLAY OF TISSUE PARAMETERSTABILIZATION)”的美国专利申请序列号14/479,108,现在是美国专利申请公开号2016/0066913。- US Patent Application Serial No. 14/479,108 entitled "LOCAL DISPLAY OF TISSUE PARAMETERSTABILIZATION", now US Patent Application Publication No. 2016/0066913.
本申请的申请人还拥有2014年4月9日提交并且全文各自以引用的方式并入本文的以下专利申请:The applicant of the present application also owns the following patent applications filed on April 9, 2014 and each of which is hereby incorporated by reference in its entirety:
-名称为“MOTOR DRIVEN SURGICAL INSTRUMENTS WITH LOCKABLE DUAL DRIVESHAFTS”的美国专利申请序列号14/248,590,现为美国专利申请公布2014/0305987;- US Patent Application Serial No. 14/248,590 entitled "MOTOR DRIVEN SURGICAL INSTRUMENTS WITH LOCKABLE DUAL DRIVESHAFTS", now US Patent Application Publication 2014/0305987;
-名称为“SURGICAL INSTRUMENT COMPRISING A CLOSING DRIVE AND A FIRINGDRIVE OPERATED FROM THE SAME ROTATABLE OUTPUT”的美国专利申请序列号14/248,581,现为美国专利申请公布2014/0305989;- US Patent Application Serial No. 14/248,581 entitled "SURGICAL INSTRUMENT COMPRISING A CLOSING DRIVE AND A FIRINGDRIVE OPERATED FROM THE SAME ROTATABLE OUTPUT", now US Patent Application Publication 2014/0305989;
-名称为“SURGICAL INSTRUMENT SHAFT INCLUDING SWITCHES FOR CONTROLLINGTHE OPERATION OF THE SURGICAL INSTRUMENT”的美国专利申请序列号14/248,595,现为美国专利申请公布2014/0305988;- US Patent Application Serial No. 14/248,595 entitled "SURGICAL INSTRUMENT SHAFT INCLUDING SWITCHES FOR CONTROLLINGTHE OPERATION OF THE SURGICAL INSTRUMENT", now US Patent Application Publication 2014/0305988;
-名称为“POWERED LINEAR SURGICAL STAPLER”的美国专利申请序列号14/248,588,现为美国专利申请公布2014/0309666;- US Patent Application Serial No. 14/248,588 entitled "POWERED LINEAR SURGICAL STAPLER", now US Patent Application Publication 2014/0309666;
-名称为“TRANSMISSION ARRANGEMENT FOR A SURGICAL INSTRUMENT”的美国专利申请序列号14/248,591,现为美国专利申请公布2014/0305991;- US Patent Application Serial No. 14/248,591 entitled "TRANSMISSION ARRANGEMENT FOR A SURGICAL INSTRUMENT", now US Patent Application Publication 2014/0305991;
-名称为“MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH ALIGNMENTFEATURES FOR ALIGNING ROTARY DRIVE SHAFTS WITH SURGICAL END EFFECTOR SHAFTS”的美国专利申请序列号14/248,584,现为美国专利申请公布2014/0305994;- US Patent Application Serial No. 14/248,584 entitled "MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH ALIGNMENTFEATURES FOR ALIGNING ROTARY DRIVE SHAFTS WITH SURGICAL END EFFECTOR SHAFTS", now US Patent Application Publication 2014/0305994;
-名称为“POWERED SURGICAL STAPLER”的美国专利申请序列号14/248,587,现为美国专利申请公布2014/0309665;- US Patent Application Serial No. 14/248,587 entitled "POWERED SURGICAL STAPLER", now US Patent Application Publication 2014/0309665;
-名称为“DRIVE SYSTEM DECOUPLING ARRANGEMENT FOR A SURGICALINSTRUMENT”的美国专利申请序列号14/248,586,现为美国专利申请公布2014/0305990;以及- US Patent Application Serial No. 14/248,586 entitled "DRIVE SYSTEM DECOUPLING ARRANGEMENT FOR A SURGICALINSTRUMENT", now US Patent Application Publication 2014/0305990; and
-名称为“MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH STATUSINDICATION ARRANGEMENTS”的美国专利申请序列号14/248,607,现为美国专利申请公布2014/0305992。- US Patent Application Serial No. 14/248,607 entitled "MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH STATUSINDICATION ARRANGEMENTS", now US Patent Application Publication 2014/0305992.
本申请的申请人还拥有2013年4月16日提交并且全文各自以引用的方式并入本文的以下专利申请:The applicant of the present application also owns the following patent applications filed on April 16, 2013 and each of which is hereby incorporated by reference in its entirety:
-名称为“SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY ASINGLE MOTOR”的美国临时专利申请序列号61/812,365;- US Provisional Patent Application Serial No. 61/812,365 entitled "SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY ASINGLE MOTOR";
-名称为“LINEAR CUTTER WITH POWER”的美国临时专利申请序列号61/812,376;- US Provisional Patent Application Serial No. 61/812,376 entitled "LINEAR CUTTER WITH POWER";
-名称为“LINEAR CUTTER WITH MOTOR AND PISTOL GRIP”的美国临时专利申请序列号61/812,382;- US Provisional Patent Application Serial No. 61/812,382 entitled "LINEAR CUTTER WITH MOTOR AND PISTOL GRIP";
-名称为“SURGICAL INSTRUMENT HANDLE WITH MULTIPLE ACTUATION MOTORS ANDMOTOR CONTROL”的美国临时专利申请序列号61/812,385;以及- U.S. Provisional Patent Application Serial No. 61/812,385 entitled "SURGICAL INSTRUMENT HANDLE WITH MULTIPLE ACTUATION MOTORS ANDMOTOR CONTROL"; and
-名称为“SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY ASINGLE MOTOR”的美国临时专利申请序列号61/812,372。- US Provisional Patent Application Serial No. 61/812,372 entitled "SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY ASINGLE MOTOR".
本文列出了许多具体细节,以提供对说明书中所述和附图中所示的实施方案的整体结构、功能、制造和用途的透彻理解。没有详细描述熟知的操作、部件和元件,以免使说明书中描述的实施方案模糊不清。读者将会理解,本文所述和所示的实施方案为非限制性示例,从而可认识到,本文所公开的特定结构和功能细节可为代表性和例示性的。在不脱离权利要求的范围的情况下,可对这些实施方案进行变型和改变。Numerous specific details are set forth herein in order to provide a thorough understanding of the general structure, function, manufacture, and use of the embodiments described in the specification and shown in the accompanying drawings. Well-known operations, components and elements have not been described in detail so as not to obscure the embodiments described in the specification. The reader will understand that the embodiments described and illustrated herein are by way of non-limiting example, so that the specific structural and functional details disclosed herein may be representative and illustrative, and may be appreciated. Variations and changes may be made to these embodiments without departing from the scope of the claims.
术语“包括(comprise)”(以及“包括(comprise)”的任何形式,诸如“包括(comprises)”和“包括(comprising)”)、“具有(have)”(以及“具有(have)”的任何形式,诸如“具有(has)”和“具有(having)”)、“包含(include)”(以及“包含(include)”的任何形式,诸如“包含(includes)”和“包含(including)”)、以及“含有(contain)”(以及“含有(contain)”的任何形式,诸如“含有(contains)”和“含有(containing)”)为开放式系动词。因此,“包括”、“具有”、“包含”或“含有”一个或多个元件的外科系统、装置、或设备具有这些一个或多个元件,但不限于仅具有这些一个或多个元件。同样,“包括”、“具有”、“包含”或“含有”一个或多个特征的系统、装置、或设备的元件具有那些一个或多个特征,但不限于仅具有那些一个或多个特征。The term "comprise" (and any form of "comprise" such as "comprises" and "comprising"), "have" (and "have" any form, such as "has" and "having"), "include" (and any form of "include", such as "includes" and "including" "), and "contain" (and any form of "contain" such as "contains" and "containing") are open-ended copulas. Thus, a surgical system, device, or device that "comprises," "has," "comprises," or "contains" one or more elements has those one or more elements, but is not limited to having only those one or more elements. Likewise, an element of a system, apparatus, or device that "comprises," "has," "includes," or "contains" one or more features has those one or more features, but is not limited to having only those one or more features .
术语“近侧”和“远侧”在本文中是相对于操纵外科器械的柄部部分的临床医生来使用的。术语“近侧”是指最靠近临床医生的部分,术语“远侧”是指远离临床医生定位的部分。还应当理解,为简洁和清楚起见,本文可结合附图使用诸如“竖直”、“水平”、“上”和“下”等空间术语。然而,外科器械在许多方向和位置中使用,并且这些术语并非限制性的和/或绝对的。The terms "proximal" and "distal" are used herein with respect to a clinician manipulating the handle portion of a surgical instrument. The term "proximal" refers to the portion closest to the clinician, and the term "distal" refers to the portion located away from the clinician. It should also be understood that, for brevity and clarity, spatial terms such as "vertical," "horizontal," "upper," and "lower" may be used herein in connection with the drawings. However, surgical instruments are used in many orientations and positions, and these terms are not intended to be limiting and/or absolute.
提供各种示例性装置和方法以用于执行腹腔镜式和微创外科手术操作。然而,读者将容易理解,本文所公开的各种方法和装置可用于多种外科手术和应用中,包括例如与开放式外科手术结合。继续参阅本具体实施方式,读者将进一步理解,本文所公开的各种器械能够以任何方式插入体内,诸如通过自然腔道、通过形成于组织中的切口或穿刺孔等。器械的工作部分或端部执行器部分可直接插入患者体内或者可通过具有工作通道的进入装置插入,外科器械的端部执行器和细长轴可通过所述工作通道推进。Various exemplary devices and methods are provided for performing laparoscopic and minimally invasive surgical procedures. However, the reader will readily appreciate that the various methods and devices disclosed herein can be used in a variety of surgical procedures and applications, including, for example, in conjunction with open surgery. With continued reference to this detailed description, the reader will further appreciate that the various instruments disclosed herein can be inserted into the body in any manner, such as through a natural orifice, through an incision or puncture hole formed in tissue, and the like. The working or end effector portion of the instrument can be inserted directly into the patient or through an access device having a working channel through which the end effector and elongated shaft of the surgical instrument can be advanced.
外科缝合系统可包括轴和从轴延伸的端部执行器。端部执行器包括第一钳口和第二钳口。第一钳口包括钉仓。钉仓能够插入到第一钳口中并且能够从第一钳口移除;然而,设想到其中钉仓不能够从第一钳口移除或至少能够易于从第一钳口替换的其他实施方案。第二钳口包括被构造成能够使从钉仓射出的钉变形的砧座。第二钳口能够相对于第一钳口围绕闭合轴线枢转;然而,可设想到其中第一钳口能够相对于第二钳口枢转的其它实施方案。外科缝合系统还包括被构造成能够允许端部执行器相对于轴旋转或进行关节运动的关节运动接头。端部执行器能够围绕延伸穿过关节运动接头的关节运动轴线旋转。设想了不包括关节运动接头的其它实施方案。The surgical stapling system can include a shaft and an end effector extending from the shaft. The end effector includes a first jaw and a second jaw. The first jaw includes a staple cartridge. The staple cartridge is insertable into and removable from the first jaw; however, other embodiments are contemplated in which the staple cartridge cannot be removed from the first jaw, or at least easily replaceable from the first jaw. The second jaw includes an anvil configured to deform staples ejected from the staple cartridge. The second jaw is pivotable relative to the first jaw about the closing axis; however, other embodiments are envisioned in which the first jaw is pivotable relative to the second jaw. The surgical stapling system also includes an articulation joint configured to allow rotation or articulation of the end effector relative to the shaft. The end effector is rotatable about an articulation axis extending through the articulation joint. Other embodiments are contemplated that do not include articulation joints.
钉仓包括仓体。仓体包括近侧端部、远侧端部和在近侧端部与远侧端部之间延伸的平台。在使用中,钉仓定位在待缝合的组织的第一侧上,并且砧座定位在组织的第二侧上。砧座朝向钉仓运动以将组织压缩并夹持抵靠平台。然后,可移除地储存在仓体中的钉可部署到组织中。仓体包括限定于其中的钉腔,其中钉可移除地储存在钉腔中。钉腔被布置成六纵向排。三排钉腔定位在纵向狭槽的第一侧上且三排钉腔定位在纵向狭槽的第二侧上。钉腔和钉的其它构造也是可以的。The staple cartridge includes a cartridge body. The cartridge body includes a proximal end, a distal end, and a platform extending between the proximal and distal ends. In use, the staple cartridge is positioned on a first side of tissue to be stapled, and the anvil is positioned on a second side of tissue. The anvil moves toward the staple cartridge to compress and clamp the tissue against the platform. The staples, which are removably stored in the cartridge body, can then be deployed into tissue. The cartridge body includes staple cavities defined therein, wherein the staples are removably stored in the staple cavities. The nail cavities are arranged in six longitudinal rows. Three rows of staple cavities are positioned on a first side of the longitudinal slot and three rows of staple cavities are positioned on a second side of the longitudinal slot. Other configurations of staple cavities and staples are also possible.
钉由仓体中的钉驱动器支撑。驱动器能够在第一或非击发位置和第二或击发位置之间运动,以从钉仓射出钉。驱动器通过保持器保留在仓体中,保持器围绕仓体的底部延伸并且包括被构造成能够抓持仓体以及将保持器保持至仓体的弹性构件。驱动器能够通过滑动件在其非击发位置和击发位置之间运动。滑动件能够在与近侧端部相邻的近侧位置和与远侧端部相邻的远侧位置之间运动。滑动件包括多个斜坡表面,该斜坡表面被构造成能够朝向砧座在驱动器下方滑动以及提升驱动器,并且钉在驱动器上受到支撑。The staples are supported by staple drivers in the cartridge body. The driver is movable between a first or non-fired position and a second or fired position to fire staples from the staple cartridge. The driver is retained in the cartridge body by a retainer that extends around the bottom of the cartridge body and includes a resilient member configured to grip and retain the retainer to the cartridge body. The driver is movable between its unfired and fired positions by means of a slide. The slider is movable between a proximal position adjacent the proximal end and a distal position adjacent the distal end. The slider includes a plurality of ramp surfaces configured to slide under the driver toward the anvil and to lift the driver, and the staples are supported on the driver.
除上述以外,滑动件还可通过击发构件朝远侧运动。击发构件被构造成能够接触滑动件并朝向远侧端部推动滑动件。限定于仓体中的纵向狭槽被构造成能够接纳击发构件。砧座还包括被构造成能够接纳击发构件的狭槽。击发构件还包括接合第一钳口的第一凸轮和接合第二钳口的第二凸轮。在击发构件朝远侧推进时,第一凸轮和第二凸轮可控制钉仓的平台和砧座之间的距离或组织间隙。击发构件还包括被构造成能够切入在钉仓和砧座中间捕集的组织的刀。希望刀定位成至少部分接近斜坡表面,使得钉先于刀被射出。In addition to the above, the slider can also be moved distally by the firing member. The firing member is configured to contact the slider and urge the slider toward the distal end. A longitudinal slot defined in the cartridge body is configured to receive a firing member. The anvil also includes a slot configured to receive the firing member. The firing member also includes a first cam engaging the first jaw and a second cam engaging the second jaw. The first and second cams may control the distance or tissue clearance between the platform of the staple cartridge and the anvil as the firing member is advanced distally. The firing member also includes a knife configured to cut through tissue captured between the staple cartridge and the anvil. It is desirable for the knife to be positioned at least partially proximate the ramp surface so that the nails are fired ahead of the knife.
本文描述的某些外科缝合和切割端部执行器包括细长通道,该细长通道被构造成可移除地接收钉仓,该钉仓具有存储在钉仓中的外科钉。钉仓包括可移动地支撑在钉仓的仓主体内的射出器或驱动器,射出器或驱动器各自被构造成在其上支撑一个或多个钉。钉支撑驱动器在仓主体内布置成纵向排,其位于仓主体中限定的纵向延伸狭槽的每侧上。该狭槽被构造成可移动地容纳击发构件,该击发构件可在其上具有组织切割边缘,该组织切割边缘用于切割已经夹紧在砧座和钉仓之间的组织。当驱动器与仓主体通过滑动件接触时,驱动器被迫使在仓主体中向上,即,朝向仓主体的平台,该滑动件被构造成由击发构件纵向地驱动通过仓主体。滑动件可移动地支撑在仓中,并且包括多个成角度的或楔形的凸轮,其对应于仓主体内的钉驱动器的行。在未击发的或“新的”钉仓中,滑动件定位在每个线中最靠近钉驱动器或在钉驱动器最近侧的起始位置。在击发冲程期间,击发构件向远侧推进滑动件,以从仓主体射出钉。一旦钉仓至少部分地被击发,即从仓主体射出,击发构件就缩回到开始或未击发位置,并且滑动件保持在现在用完的钉仓的远侧。一旦击发构件已经返回到开始或未击发位置,就可将用完的钉仓从端部执行器的通道移除。Certain surgical stapling and cutting end effectors described herein include an elongated channel configured to removably receive a staple cartridge having surgical staples stored in the staple cartridge. The staple cartridge includes an ejector or driver movably supported within a cartridge body of the staple cartridge, the ejector or driver each being configured to support one or more staples thereon. The staple support drivers are arranged within the cartridge body in longitudinal rows on each side of longitudinally extending slots defined in the cartridge body. The slot is configured to movably receive a firing member, which may have a tissue cutting edge thereon for cutting tissue that has been clamped between the anvil and the staple cartridge. The driver is forced upward in the cartridge body, ie, towards the platform of the cartridge body, when the driver is in contact with the cartridge body through a slide configured to be driven longitudinally through the cartridge body by the firing member. The slider is movably supported in the cartridge and includes a plurality of angled or wedge-shaped cams that correspond to the rows of staple drivers within the cartridge body. In an unfired or "new" staple cartridge, the slider is positioned in each wire at the starting position closest to the staple driver or on the proximal-most side of the staple driver. During the firing stroke, the firing member advances the slider distally to fire the staples from the cartridge body. Once the staple cartridge is at least partially fired, ie, fired from the cartridge body, the firing member is retracted to the start or unfired position, and the slider remains distal to the now spent staple cartridge. Once the firing member has returned to the starting or unfired position, the spent staple cartridge can be removed from the channel of the end effector.
除上述之外,图1中示出了外科器械系统10。外科器械系统10包括柄部14和轴组件200,轴组件200可移除地可附接到柄部14。轴组件200包括端部执行器300,端部执行器300包括仓通道302和能够相对于仓通道302移动的砧座306。钉仓304可移除地定位在仓通道302中。In addition to the above,
此类切割和缝合端部执行器安装到细长轴组件的远侧端部,细长轴组件可操作地支撑各种驱动轴和部件,该驱动轴和部件被构造成将各种控制运动施加到端部执行器。在各种情况下,轴组件可包括关节运动接头,或者当关节运动动作被施加到端部执行器时,可以其它方式被构造成便于端部执行器相对于细长轴的一部分进行关节运动。轴组件联接到支撑各种驱动系统的壳体,所述系统在细长轴组件中可操作地与各种组件对接。在某些布置中,壳体可包括手持壳体或柄部。在其它布置中,壳体可包括机器人或自动外科系统的一部分。壳体的各种驱动系统可被构造成将轴向驱动运动、旋转驱动运动和/或轴向驱动运动和旋转驱动运动的组合施加到细长轴组件。在手持式布置中,轴向运动可由一个或多个手动致动的手动曲柄产生和/或由一个或多个电动马达产生。机器人系统可采用电动马达和/或其它自动驱动布置,其被构造成产生并向细长轴组件施加必要的控制运动,并且在一些情况下,最终向端部执行器中的击发构件施加必要的控制运动。Such cutting and stapling end effectors are mounted to the distal end of an elongated shaft assembly operatively supporting various drive shafts and components configured to impart various control motions to the end effector. In various cases, the shaft assembly may include an articulation joint, or may be otherwise configured to facilitate articulation of the end effector relative to a portion of the elongated shaft when an articulation action is applied to the end effector. The shaft assembly is coupled to a housing that supports various drive systems that operably interface with the various components in the elongated shaft assembly. In some arrangements, the housing may include a handheld housing or handle. In other arrangements, the housing may include part of a robotic or automated surgical system. The various drive systems of the housing may be configured to impart axial drive motion, rotational drive motion, and/or a combination of axial and rotational drive motion to the elongated shaft assembly. In a hand-held arrangement, the axial movement may be produced by one or more manually actuated hand cranks and/or by one or more electric motors. The robotic system may employ electric motors and/or other automated drive arrangements configured to generate and apply the necessary control motion to the elongated shaft assembly and, in some cases, ultimately to the firing member in the end effector. Control movement.
对于需要旋转控制运动的外科端部执行器,细长轴组件可包括“近侧”旋转驱动轴部分,其由对应的马达或支撑在壳体中的其它旋转运动源旋转。近侧旋转驱动轴被构造成将旋转控制运动施加到端部执行器驱动轴,该端部执行器驱动轴支撑在端部执行器中。在此类布置中,击发构件与端部执行器驱动轴对接,使得击发构件可被纵向推进通过端部执行器,然后返回到未击发位置。For surgical end effectors requiring rotationally controlled motion, the elongated shaft assembly may include a "proximal" rotational drive shaft portion that is rotated by a corresponding motor or other source of rotational motion supported in the housing. The proximal rotational drive shaft is configured to apply rotational control motion to an end effector drive shaft supported in the end effector. In such arrangements, the firing member interfaces with the end effector drive shaft such that the firing member can be advanced longitudinally through the end effector and then returned to the unfired position.
当使用被构造成切割和缝合组织的外科器械时,应采取措施以确保在致动外科器械的击发驱动系统之前已将未用完的外科钉仓正确地安装在外科器械的端部执行器中。例如,如果临床医生无意中致动了击发驱动系统的组织切割构件而没有首先在端部执行器中安装未用完的钉仓,则组织切割构件可以在不缝合组织的情况下切断组织。如果临床医生无意中将部分用完的钉仓安装到端部执行器中,也会出现类似的问题。当在先前手术中或手术的先前步骤中使用钉仓时,可以产生部分用完的钉仓,然后在钉中的全部从其中射出之前从端部执行器移除。如果要在外科器械中重复使用此种部分用完的仓,则组织切割构件可在组织中产生比施加到组织的钉线更长的切口。因此,当使用被构造成切割和缝合组织的外科端部执行器时,期望外科端部执行器被构造成防止组织切割构件的致动,除非未用完的“新的”钉仓已正确安装在端部执行器中。When using a surgical instrument configured to cut and staple tissue, steps should be taken to ensure that an unused surgical staple cartridge has been properly installed in the surgical instrument's end effector prior to actuating the surgical instrument's firing drive system . For example, if a clinician inadvertently actuates the tissue-cutting member of the firing drive system without first installing an unused cartridge in the end effector, the tissue-cutting member may sever tissue without stapling the tissue. A similar problem can arise if a clinician inadvertently installs a partially used cartridge into an end effector. When a staple cartridge is used in a previous procedure or in a previous step of a procedure, a partially used staple cartridge can be created and then removed from the end effector before all of the staples are ejected therefrom. If such a partially used cartridge is to be reused in a surgical instrument, the tissue cutting member can create a longer incision in the tissue than the staple line applied to the tissue. Therefore, when using a surgical end effector configured to cut and staple tissue, it is desirable that the surgical end effector be configured to prevent actuation of the tissue cutting member unless an unused "new" staple cartridge has been properly installed in the end effector.
图2和图3示出了可解决此类问题的外科切割和缝合端部执行器20000的部分。如在图2和图3中可以看到的,端部执行器20000包括旋转端部执行器驱动轴20010。虽然未示出,但是旋转端部执行器驱动轴20010可旋转地支撑在细长通道内,该细长通道被构造成在细长通道中可移除地支撑外科钉仓。旋转端部执行器驱动轴20010被构造成从近侧旋转驱动轴接收旋转驱动运动,该近侧旋转驱动轴附接到通道或以其它方式可操作地与旋转端部执行器驱动轴20010对接。旋转控制运动可通过对应的驱动布置施加到近侧旋转驱动轴,该驱动布置可包括由机器人控制系统或其它(一个或多个)旋转控制运动源手动致动或控制的一个或多个马达。在另选布置中,可手动产生旋转控制运动。仍然参考图2和图3,外科端部执行器20000包括击发组件20020,该击发组件20020被构造用于在通道内纵向行进。在所示实施方案中,击发组件20020包括上部击发主体20022,该上部击发主体20022具有远侧击发耳状物20024和近侧击发耳状物20026。在远侧击发耳状物20024中具有无螺纹孔(未示出),该无螺纹孔被构造成接收穿过其中的旋转端部执行器驱动轴20010。近侧击发耳状物20026与远侧击发耳状物20024间隔开,以在近侧击发耳状物和远侧击发耳状物之间限定螺母腔体20028。近侧击发耳状物20026具有穿过其中的无螺纹孔20027,该无螺纹孔20027被构造成接收穿过其中的旋转端部执行器驱动轴20010。2 and 3 illustrate portions of a surgical cutting and stapling
如在图2和图3中可以看到的,旋转端部执行器驱动轴20010带有螺纹。击发组件20020包括行进螺母20030,该螺母20030通过螺纹轴颈连接在旋转端部执行器驱动轴20010上并且位于远侧击发耳状物20026和近侧击发耳状物20027之间的螺母腔体20028中。行进螺母20040能够在螺母腔体20028内在第一位置(图2)和第二位置(图3)之间移动。行进螺母20040包括上凹口部分20042,上凹口部分20042具有从其突出的向远侧延伸的保持器突片20044。当行进螺母20040处于第一位置时,带凹口的上部部分20042与击发组件20020的上部击发主体20022垂直对准。如可以在图2和图3中进一步看到的,远侧击发耳状物20024可包括一对侧向突出的远侧翼片20025(图中仅可以看到一个),并且近侧击发耳状物20026可包括一对侧向突出的近侧翼片20027。同样地,行进螺母20040可包括一对螺母翼片20046,当行进螺母20040处于第一位置时,螺母翼片被构造成与远侧翼片20025和近侧翼片20027对准。参见图2。当处于该对准位置时,翼片20025、20027和20046自由地在设置在钉仓主体中的通道内穿过。同样在所示的布置中,击发组件20020的上部主体部分20022包括一对侧向突出的上部翼片20030,当击发组件在远侧驱动通过端部执行器时,上部翼片被构造成可滑动地接收在砧座中的对应通道中或以其它方式可滑动地接合砧座。因此,翼片20025、20027、20046和上部翼片20030用于在击发过程期间将砧座保持在距钉仓期望的距离处。击发组件20020还包括组织切割表面或组织切割刀片20032,用于切割已经夹紧在砧座和钉仓之间的组织。As can be seen in Figures 2 and 3, the rotary end
外科端部执行器20000的通道被构造成在该通道中能够可操作地且可移除地支撑外科钉仓,该外科钉仓包括滑动件20050。滑动件20050能够从位于钉仓近侧端部中的起始位置移动到钉仓内的结束位置。滑动件20050包括中央滑动件主体20052,所述中央滑动件主体具有形成在中央滑动件主体中的一堆凸轮楔形件20054。在所示的示例中,滑动件20050包括四个凸轮楔形件20054,其中两个凸轮楔形件20054位于中央滑动件主体20052的每侧上。每个凸轮楔形件20054将对应于位于仓主体中的一行钉支撑驱动器。当滑动件20050向远侧驱动通过仓主体时,凸轮楔形件20054在仓主体内向上依次驱动对应行中的钉驱动器,以从而将钉射出成与砧座的下侧的形成接触。The channel of the
在所示的示例中,滑动件20050包括形成在中央滑动件主体20052中的保持腔体20056,当行进螺母处于第一位置并且滑动件20050处于起始(预击发)位置时,中央滑动件主体被构造成保持地接合行进螺母20040上的向远侧延伸的保持器凸片20044。参见图2。在某些布置中,一个或多个偏压构件20060可设置在击发组件20020中,以将行进螺母20040偏压到第一位置。例如,扭转弹簧可被支撑在近侧击发耳状物20024和远侧击发耳状物20026中的一个或二者中,以在螺纹端部执行器驱动轴20020未致动时将行进螺母20040偏压到第一位置(方向D1)。然而,当螺纹端部执行器驱动轴20020在击发方向(D2)上旋转时,旋转驱动轴20020克服偏压构件20060的偏压并且将行进螺母20030移动到图3中所示的第二位置。当行进螺母20030处于第二位置时,保持突片20044与仓主体中的狭槽不对准,该狭槽可滑动地容纳中央滑动件主体20052中并且螺母翼片20046与仓主体中的通道不对准。因此,旋转端部执行器驱动杆20010的进一步旋转由于突片20044和翼片20046与仓主体的对应部分的这种未对准而将不会向远侧驱动击发组件20020。但是,如果仓未用完(从未被击发),则仓20050将处于起始位置。当仓正确地坐置在端部执行器通道中时,保持器突片20044将被接收在滑动件20050中的保持腔体20056中,当旋转端部执行器驱动轴20010在击发方向上旋转时,该保持腔体2004将行进螺母20030保持在第一位置。因此,当未用完的仓未正确地坐置在通道中时,此种布置将防止临床医生无意中推进击发组件20020(和组织切割表面20044)。因此,当未用完的仓未正确地坐置在通道中时,此种布置将防止临床医生无意中推进击发组件20020(和组织切割表面20044)。如果未用完的仓存在于通道中,但尚未正确地坐置在通道中,使得保持突片被接收在滑动件中的保持腔体内,则临床医生将不能推进击发组件。In the example shown, the
下面转向图4至图6,示出了另一个外科切割和缝合端部执行器20100的部分。端部执行器20100包括通道20110,该通道20110被构造成在通道中可移除地接收外科钉仓20200。在至少一个实施方案中,端部执行器20100包括旋转端部执行器驱动轴20120,其能够在第一“锁定”位置和第二“驱动”位置之间选择性地移动或偏转。旋转端部执行器驱动轴20120被构造成从近侧旋转驱动轴(未示出)接收旋转驱动运动。旋转控制运动可通过对应的驱动布置施加到近侧旋转驱动轴,该驱动布置可包括由机器人控制系统手动致动或控制的一个或多个马达。在另选布置中,可手动产生旋转控制运动。旋转端部执行器驱动轴20120可通过对应的旋转轴承布置或支架可旋转地支撑在其近侧端部和远侧端部上,该旋转轴承布置或支架便于旋转端部执行器驱动轴20120的操作旋转,但使得旋转端部执行器驱动轴的一部分能够在第一位置和第二位置之间偏转,同时保持与近侧旋转驱动轴或其它旋转运动源的旋转操作接合。Turning now to Figures 4-6, portions of another surgical cutting and stapling
如图4至图8中可以看到的,外科端部执行器20100包括击发组件20130,该击发组件20130被构造用于在通道20110内纵向行进。在所示实施方案中,击发组件20130包括击发主体20132,击发主体20132螺纹地轴颈连接在旋转端部执行器驱动轴20120上。击发主体20132包括一对侧向突出的翼片20134,其构造成在通道20110中的通路20112内穿过。通路20112可由两个向内延伸的间隔开的通道突片20114(在图7和图8中仅可以看到一个突片)限定,在所述通道突片之间具有狭槽20116以容纳旋转端部执行器驱动轴20120以及其间的击发主体20132的通路。参见图7和图8。同样在所示的布置中,击发组件20130的上部主体部分20136包括一对侧向突出的上部翼片20138,当击发组件20130被向远侧驱动穿过端部执行器20100时,上部翼片被构造成可滑动地接收在砧座20150中的对应通道20152中。因此,翼片20134和20138用于在击发过程期间将砧座20150保持在距钉仓20200期望的距离处。击发组件20130还包括组织切割表面或组织切割刀片20139,其被构造成切割已经夹紧在砧座和钉仓之间的组织。As can be seen in FIGS. 4-8 , the
图4示出了将未用完的钉仓20200安装到外科端部执行器20100中。如图4中可以看到的,未用完的钉仓20200包括位于起始位置的滑动件20210。滑动件20210能够从位于钉仓20200近侧端部中的起始位置移动到仓20200内的结束位置。如图8中可以看到的,滑动件20210包括中央滑动件主体20212,中央滑动件主体具有形成在中央滑动件主体中的一堆凸轮楔形件20214。在所示的示例中,滑动件20210包括四个凸轮楔形件20214,其中两个凸轮楔形件20214位于中央滑动件主体20212的每侧上。每个凸轮楔形件20214对应于支撑在仓20200中的一行钉支撑驱动器。当滑动件20210向远侧驱动通过仓20200时,凸轮楔形件20214在仓20200内向上依次驱动对应行中的钉驱动器,以从而将钉驱动成与砧座2015的下侧的形成接触。在将未用完的钉仓20200坐置在通道20110中之前,旋转驱动轴20120位于第一位置或向上位置(由箭头“U”表示)。图7示出了在将钉仓安装在端部执行器内之前旋转驱动轴20120和击发组件20130处于锁定位置的位置。如图7中可以看到的,翼片20134与通道20110的通道突片20144对准,使得如果临床医生努力致动旋转驱动轴20120以向远侧驱动击发组件通过通道20110,则由于翼片20134和通道突片20114之间的接触,将防止击发组件20130向远侧移动。旋转驱动轴20120以及击发组件20130可向下偏转的距离在图7中表示为距离Df。FIG. 4 shows the installation of an
在所示的示例中,击发组件接合凹口20216设置在滑动件主体20212中,其构造成接合击发组件20130的上主体部分20136中的对应接合凹口20137。当滑动件20210的击发组件接合凹口20216最初接合击发组件20130的上部主体部分20136中的接合凹口20137,滑动件20120将击发组件20130和端部执行器旋转驱动轴20120向下偏压或偏转到通道20110中(由图8中的箭头“D”表示)。此种运动使击发组件20130的翼片20134与通道20110中的通路20112对准。外科钉仓20220可被构造成咬合到通道20100中并以正确安装的取向保持在通道中。图5和图8示出了处于“驱动位置”或“第二位置”的旋转驱动轴20120,其中击发组件20130与通道20110垂直对准,以便准许当旋转驱动轴20120在击发方向上旋转时击发组件20130向远侧驱动通过钉仓20200。In the example shown, firing assembly engagement recesses 20216 are provided in the
图6示出了用完的或部分用完的钉仓20200’安装到外科端部执行器20100中。如在图6中可以看到的,滑动件20210已经从钉仓20200’内的起始位置向远侧移动。因此,当钉仓20200’正确地安装在通道20110内时,滑动件20210,更具体地,滑动件20210中的击发组件接合凹口20126与击发组件20130中的接合凹口20137脱离接合。因此,击发组件20130保持在第一或锁定位置。因此,如果临床医生无意中致动旋转端部执行器驱动轴20120,则击发组件20130将不会被向远侧推进到仓20200’中。FIG. 6 shows a spent or partially spent staple cartridge 20200' installed into the
图9至图14示出了另一个可锁定击发组件20300的部分,其被防止向远侧推进,除非未用完的外科钉仓已正确地坐置在端部执行器通道20400内。图9示出了击发组件20300的螺纹螺母部分20302,其以本文所述的方式通过螺纹轴颈连接在旋转端部执行器驱动轴上。为清楚起见,在图9至图14中省略了旋转端部执行器驱动轴。在所示实施方案中,锁定耳状物20304和致动器耳状物20306从螺纹螺母部分20302侧向突出。尽管未示出,但击发组件20300包括具有组织切割边缘的上部击发主体,该组织切割边缘可类似于本文所公开的那些。图10至图14示出了与通道20400连接的螺纹螺母部分20302。应当理解,通道20400被构造成能够可操作地且可移除地将外科钉仓支撑在通道中。首先转到图10,通道20400包括居中设置的纵向狭槽20402,其被构造成能够可操作地支撑旋转端部执行器驱动轴以及准许螺纹螺母20302纵向行进通过通道20400。另外,第一纵向突出部分20404和第二纵向突出部分20406设置在纵向狭槽20402的每侧上。突出部分20404、20406用于限定纵向通道20408,当击发组件20300向远侧击发通过通道20400时,纵向通道20408准许突出部分20304和20306在通道中通过。另外,通道20400包括纵向腔体20410,以用于在纵向腔体中接收仓主体。应当理解的是,仓主体可被构造成咬合地且可移除地保持在腔体20410内。FIGS. 9-14 illustrate a portion of another
在所示实施方案中,锁定凹口20412设置在突出部分20404中。当击发组件20300在击发之前处于第一位置或开始位置时,锁定凹口20412的尺寸被设计成在锁定凹口中接收锁定耳状物20304的至少一部分。锁定弹簧或偏压构件20414设置在突出部分20406上并且被构造成在锁定方向“L”上接合并偏压致动器耳状物20306。致动器耳状物20306的此种旋转促使锁定耳状物20304进入锁定凹口20412。当处于该位置时,当旋转端部执行器驱动轴在击发方向上旋转时,击发组件20300不能向远侧推进。In the embodiment shown, the locking
图12示出了当击发组件已经移动到第二或解锁位置时击发组件20300的螺纹螺母部分20302的位置。图13示出了当外科钉仓最初被引入通道20400时发生的情况。在图13和图14中,为清楚起见省略了仓主体。然而,应当理解,外科钉仓包括滑动件20500。滑动件20500能够从位于钉仓近侧端部中的起始位置移动到钉仓内的结束位置。如图13和图14中可以看到的,滑动件20500包括中央滑动件主体20502,中央滑动件主体具有形成在中央滑动件主体中的一堆凸轮楔形件20504。在所示的示例中,滑动件20500包括四个凸轮楔形件20504,其中两个凸轮楔形件20504位于中央滑动件主体20502的每侧上。每个凸轮楔形件20054对应于位于仓20500中的一行钉支撑驱动器。当滑动件20500向远侧驱动通过仓时,凸轮楔形件20504在仓内向上依次驱动对应行中的钉驱动器,以从而将钉射出成与砧座的下侧的形成接触。Figure 12 shows the position of the threaded
仍然参考图13,当仓正确地安装在通道20400内并且滑动件处于起始位置时,滑动件20500被构造成接触致动器耳状物20306。在所示实施方案中,例如,向下延伸的致动器构件20506形成在滑动件20500上或以其它方式附接到滑动件20500。当仓安装在通道20400中时,滑动件20500上的致动器构件20506接触致动器耳状物20306并将击发组件在解锁方向“UL”(图13)上偏压到图14中所示的位置。如图14中可以看到的,锁定耳状物20304脱出锁定凹口20412,并且击发组件20300现在可以被纵向推进通过通道和钉仓。因此,此种布置将防止临床医生无意中推进击发组件,除非具有处于起始位置的滑动件的仓已经正确地安装在通道中。如在此上下文中使用的,术语“正确安装”意味着钉仓已经以预期的方式保持地坐置在通道中,以便准许滑动件和其其它部分以本文所述的方式与击发组件相互作用。Still referring to FIG. 13 , the
图15至图17示出了端部执行器20500的部分,该端部执行器被构造为切割和缝合组织。端部执行器20500包括细长通道20510,该细长通道20510被构造成在细长通道中能够可操作地支撑外科钉仓20600。端部执行器包括砧座组件20700,其可操作地支撑砧座同心驱动构件20710,用于可操作地将击发构件20720驱动通过端部执行器20500。砧座同心驱动构件20710可例如居中地设置在砧座框架20712内并且基本上延伸其长度。在所示实施方案中,砧座同心驱动构件20710包括砧座驱动轴,该砧座驱动轴包括远侧轴承耳状物20714和近侧轴承耳状物20716。远侧轴承耳状物20714可旋转地容纳在远侧轴承壳体20718中,该远侧轴承壳体20718支撑在砧座框架20712中的轴承凹坑中。近侧轴承耳状物20716通过浮接轴承壳体20720可旋转地支撑在砧座组件20700中,该浮接轴承壳体20720可移动地支撑在形成于近侧砧座部分20724中的轴承凹坑20722中。参见图16。近侧轴承壳体布置和远侧轴承壳体布置可用于防止或至少最小化砧座驱动轴20710上的压缩力的发生,否则可能导致砧座驱动轴20710在高力条件下屈曲。砧座驱动轴20710还包括从动击发齿轮20726、近侧螺纹或螺旋区段20728和远侧螺纹或螺旋区段20730。在所示的布置中,近侧螺纹区段20728具有第一长度,并且远侧螺纹区段20730具有大于第一长度的远侧长度。在所示的布置中,远侧螺纹区段20730的节距大于近侧螺纹区段20728的节距。换句话说,远侧螺纹区段20730的导程大于近侧螺纹区段20728的导程。在一种布置中,远侧螺纹区段20730的导程可为近侧螺纹区段20728的导程的大约两倍。另外,可在近侧螺纹区段20728和远侧螺纹区段20730之间提供死空间20731。在至少一个示例中,砧座驱动轴20710可由挤出齿轮原件制成为一体。15-17 illustrate portions of an
为了便于各种砧座部件的组装,砧座组件20700包括砧座盖20740,该砧座盖20740可通过焊接、按扣特征等附接到砧座框架20712。此外,砧座组件20700包括一对砧座板或钉形成板20742,其可在其底部表面上包含各种图案的钉形成凹坑,其对应于被支撑在细长通道20510中的外科钉仓20600中的钉布置。钉形成板20742可由金属或类似材料制成并且焊接到或以其它方式附接到砧座框架20712。在其它布置中,也可采用单个砧板,在该砧板中具有狭槽以容纳击发构件。此种砧板或板的组合可用于改善砧座组件的整体刚度。例如,(一个或多个)砧板可为平的并且具有“铸造”在砧板中的钉形成凹坑。To facilitate assembly of the various anvil components, the
如在图15和图18至图20中可以看到的,外科端部执行器20500包括击发构件20800,该击发构件20800具有主体部分20802,该主体部分20802具有形成在其上或以其它方式附接到其的刀螺母部分20804。刀螺母部分20804被构造成接收在砧座驱动轴20710上。在刀螺母部分20804中形成远侧螺纹节结20806和近侧螺纹节结20808,该远侧螺纹节结20806和近侧螺纹节结20808被构造成接合近侧螺纹区段20728和远侧螺纹区段20730。远侧螺纹节结20806相对于死空间20731的长度与近侧螺纹节结20808间隔开,使得当刀螺母部分20804跨越死空间20731时,远侧螺纹节结20806与远侧螺纹区段20730螺纹接合,并且近侧螺纹节结20808与近侧螺纹区段20728螺纹接合。另外,砧座接合突片20810从刀螺母20804的相对侧向部分侧向突出,并且各自取向成与附接到砧座框架20712的对应钉形成板20742接合。击发构件20800还包括从主体部分20800的每个侧向侧突出的通道接合突片20820。击发构件20800还包括组织切割表面20822。As can be seen in Figures 15 and 18-20, the
砧座驱动轴20710在第一旋转方向上的旋转将导致击发构件20800从第一位置轴向移动到第二位置。类似地,砧座驱动轴20710在第二旋转方向上的旋转将导致击发构件20800从第二位置轴向缩回到第一位置。砧座驱动轴20710最终从近侧驱动轴(未示出)获得旋转运动,该近侧驱动轴可操作地与远侧动力轴20830对接。在所示的布置中,远侧动力轴20830具有远侧驱动齿轮20832,其被构造用于当砧座组件20710处于闭合位置时与砧座驱动轴20710上的从动击发齿轮20726啮合接合。砧座驱动轴20710被称为与远侧动力轴20830“分离且不同”。也就是说,例如至少在所示的布置中,砧座驱动轴20710不与远侧动力轴20830同轴对准,并且不形成远侧动力轴20830的一部分。另外,例如,当砧座组件20700在打开位置和闭合位置之间运动时,砧座驱动轴20710能够相对于远侧动力轴20830移动。近侧驱动轴可最终通过支撑在壳体中的马达旋转,该壳体附接到联接到外科端部执行器20500的轴组件。壳体可包括手持组件或机器人控制系统的一部分。Rotation of the
在所示的布置中,砧座组件20700通过向远侧推进闭合管20900而闭合。如图15中可以看到的,闭合管20900包括内螺纹闭合螺母20902,其被构造用于与形成在远侧动力轴20830上的闭合螺纹节段20834螺纹接合。远侧动力轴20830的初始旋转将向远侧驱动闭合管20900以将砧座组件20700凸轮致动至闭合位置。远侧动力轴20830在相对方向上的旋转将在近侧方向上驱动闭合管20900,以准许砧座组件20700移动到打开位置。In the arrangement shown, the
转到图18至图20,通道包括一对向内延伸的纵向保持突片20512,在所述纵向保持突片之间具有狭槽空间20514,以容纳击发构件20800的纵向移动。另外,通道20510包括近侧锁定腔体20516,其邻近保持突片20512。锁定腔体20516过渡到远侧击发腔体,远侧击发腔体与突片20512和突片之间的空间20514共同延伸。锁定腔体20516大于远侧击发腔体,以准许击发构件20800枢转到图18中所示的位置。当处于该位置时,击发构件主体20802脱出与狭槽空间的对准,并且突片20820脱出与远侧击发腔体20518的对准。当处于该位置时,从击发构件20800突出的突片20820中的一个与保持突片20512中的一个对准,因此防止击发构件20800被纵向推进通过通道20510。当砧座驱动轴20710最初旋转并且具有处于起始位置的滑动件的外科钉仓尚未安装在通道20510中时,击发构件20800将枢转到该“锁定”位置。然而,当具有处于起始位置的滑动件的仓已经安装在通道20510中时,滑动件将用于接触或以其它方式与击发构件20800对接,以将击发构件20800定位并保持成与保持突片20512之间的空间20514对准。参见图19。因此,砧座驱动轴20710的继续旋转将向远侧驱动击发构件20800通过通道20510,如图20所示。因此,此种布置将防止临床医生无意地致动砧座驱动轴20710以向远侧驱动击发构件20800通过通道20510,除非已经在通道中安装了具有处于起始位置的滑动件的未用完的外科钉仓。18-20, the channel includes a pair of inwardly extending
在其它布置中,可以电的方式确定已经正确地坐置在外科切割和缝合端部执行器的通道中的未用完的钉仓内的处于正确位置的滑动件的检测。例如,这可通过滑动件上的接触件实现,当滑动件处于已经正确地坐置在通道中的仓中的起始位置时,该接触件使电路接通。在击发时,电路被打开并且不准许进一步击发,直到电路再次闭合。In other arrangements, detection of a properly positioned sled within an unused staple cartridge that has been properly seated in the channel of the surgical cutting and stapling end effector can be determined electrically. This can be accomplished, for example, by means of contacts on the slider which make the circuit close when the slider is in the starting position in the bin already seated correctly in the channel. Upon firing, the circuit is opened and no further firing is permitted until the circuit is closed again.
如上所述,用于第一次抓握、夹紧、缝合和/或切割组织的缝合组件在本领域中是公知的。例如,先前的缝合组件,诸如美国专利号5,865,361中公开的那些,已经包括了可操作地连接到柄部组件的装载单元。1999年2月2日公布的名称为“外科缝合设备(SURGICALSTAPLING APPARATUS)”的美国专利号5,865,361的公开内容以引用方式全文并入本文。虽然这些先前的缝合组件的柄部组件被构造用于多种用途,但是装载单元被构造用于单次使用。在每个装载单元用完或至少部分用完之后,将装载单元从柄部组件中移除,然后如果需要,则用新的或未用完的装载单元替换。这些先前的装载单元的构造不准许替换装载单元的仓部分,使得可以再次使用用完的装载单元。As mentioned above, stapling assemblies for first grasping, clamping, stapling and/or cutting tissue are known in the art. For example, previous suturing assemblies, such as those disclosed in US Pat. No. 5,865,361, have included a loading unit operably connected to the handle assembly. The disclosure of US Patent No. 5,865,361, issued February 2, 1999, entitled "SURGICAL STAPLING APPARATUS," is incorporated herein by reference in its entirety. While the handle assemblies of these previous suture assemblies were configured for multiple uses, the loading unit was configured for single use. After each loading unit is exhausted or at least partially exhausted, the loading unit is removed from the handle assembly and then replaced with a new or unused loading unit if necessary. The configuration of these previous loading units does not permit replacement of the bin portion of the loading unit so that the spent loading unit can be reused.
美国专利申请公布号2012/0286021公开了另选的缝合组件,其包括包括砧座的第一夹具和包括钉仓的第二夹具。2012年11月15日公布的名称为“可替换钉仓(REPLACEABLESTAPLE CARTRIDGE)”的美国专利申请公布号2012/0286021的全部公开内容以引用方式并入本文。与先前的装载单元不同,这些缝合组件的第二夹具可以从装载单元完全移除,然后用另一个第二夹具替换,可能是在前一个第二夹具已经用完之后。值得注意的是,这些缝合组件的整个第二夹具被替换(不仅仅是第二夹具的一部分),如2006年1月24日公布的名称为“具有用完的仓闭锁件的外科缝合器械(SURGICAL STAPLING INSTRUMENT HAVING ASPENT CARTRIDGE LOCKOUT)”的美国专利号6,988,649中所公开的,该专利的整个公开内容以引用方式并入本文。US Patent Application Publication No. 2012/0286021 discloses an alternative stapling assembly that includes a first clamp that includes an anvil and a second clamp that includes a staple cartridge. The entire disclosure of US Patent Application Publication No. 2012/0286021, published November 15, 2012, entitled "REPLACEABLESTAPLE CARTRIDGE," is incorporated herein by reference. Unlike previous loading units, the second clamp of these suture assemblies can be completely removed from the loading unit and then replaced with another second clamp, possibly after the previous second clamp has been used up. Notably, the entire second clamp of these suturing assemblies is replaced (not just a portion of the second clamp), as published on January 24, 2006 entitled "Surgical Stapling Instruments with Spent Cartridge Locks ( SURGICAL STAPLING INSTRUMENT HAVING ASPENT CARTRIDGE LOCKOUT)" US Patent No. 6,988,649, the entire disclosure of which is incorporated herein by reference.
然而,在美国专利申请公布号2012/0286021中公开的缝合组件是有缺陷的。比如,在美国专利申请公布号2012/0286021中公开的缝合组件包括切割构件,即使第二夹具未附接到缝合组件,该切割构件亦可以向远侧推进。因此,切割构件可无意地暴露于患者的组织。下面进一步讨论了对这些缝合组件的各种改善。However, the suture assembly disclosed in US Patent Application Publication No. 2012/0286021 is deficient. For example, the stapling assembly disclosed in US Patent Application Publication No. 2012/0286021 includes a cutting member that can be advanced distally even if the second clip is not attached to the stapling assembly. Thus, the cutting member may be inadvertently exposed to the patient's tissue. Various improvements to these suture assemblies are discussed further below.
现在转向图21,外科器械系统21000包括柄部21010和附接到柄部21010的轴21020的缝合组件或装载单元21030。主要参考图22,装载单元21030包括近侧端部或卡口连接器21032,其构造成将装载单元21030可释放地附接到轴21020。类似于美国专利申请公布号2012/0286021中公开的缝合组件,装载单元21030包括砧座21040和可附接的仓夹具21050。仓夹具21050一旦附接到装载单元21030,就可在打开位置(图21)和闭合或夹紧位置之间枢转。Turning now to FIG. 21 , a
柄部21010包括致动器或触发器21014,其可朝向柄部21010的手枪式夹持件21012旋转,以向远侧驱动装载单元21030的击发杆。在触发器21014的第一冲程期间,击发杆接合仓夹具21050并将仓夹具21050移动到其闭合位置。在触发器21014的一个或多个后续冲程期间,击发杆被推进通过仓夹具21050。仓夹具21050包括可移除地存储在仓夹具中的多个钉,当击发杆向远侧推进通过仓夹具21050时,该多个钉从仓夹具21050射出。更具体地,如本文其它地方更详细地讨论的,击发杆进入仓夹具21050并向远侧推动存储在仓夹具21060中的滑动件,这继而又将钉驱动离开仓夹具21050。The
主要参考图22,装载单元21030还包括关节运动接头21036,砧座21040和仓夹具21050可以围绕该关节运动接头21036进行关节运动。装载单元21030包括关节运动驱动器,该关节运动驱动器被构造成使砧座21040和仓夹具21050围绕关节运动接头21036进行关节运动。关节运动驱动器可操作地与关节运动致动器21016联接,该关节运动致动器21016可旋转以推动或拉动关节运动驱动器,这取决于关节运动致动器21016旋转的方向。22, the
在图23和图24中示出了另选的外科器械系统21100。系统21100包括柄部21110和可附接的装载单元21130。与上文类似,装载单元21130包括砧座夹具21040和可移除地附接的仓夹具21050。装载单元21130还包括关节运动接头21138和挠性接头21136,关节运动接头21138和挠性接头21136被构造成准许端部执行器相对于装载单元21130的轴部分21120进行关节运动。轴部分21120包括近侧连接器21122,该近侧连接器21122被构造成将装载单元21130附接到柄部21110。主要参考图25,近侧连接器21122包括可旋转输入21128,其可操作地与柄部21110的可旋转输出21118接合。每个可旋转输入21128是驱动系统的一部分,该驱动系统例如围绕挠性接头21136和/或关节运动接头21128使装载单元21130进行关节运动,闭合仓夹具21050,和/或从仓夹具21050击发钉。柄部21110包括控制器21114和21116,其可以用于操作装载单元21130的驱动系统。2013年10月24日公布的名称为“用于内窥镜检查程序的设备(APPARATUS FOR ENDOSCOPIC PROCEDURES)”的美国专利申请公布号2013/0282052的公开内容以引用方式全文并入本文。An alternative
除上述之外,钉仓夹具21050可移除地附接到装载单元21030的砧座夹具21040。主要参考图26和图27,砧座夹具21040的近侧端部包括从其相对侧延伸的附接突出部21042。钉仓夹具21050的近侧端部包括限定在近侧端部中的凹陷部21052,凹陷部21052被构造成接收附接突出部21042。砧座夹具21040固定地附接到装载单元21030的框架,并且附接突出部21042从砧座夹具21040固定地延伸。在至少一种情况下,砧座夹具21040和/或附接突出部21042与砧座部分21030的框架一体地形成。In addition to the above, the
钉仓夹具21050还包括夹子21056,夹子21056被构造成接合并抓住附接突出部21042。每个夹子21056定位在仓夹具21050中限定的狭槽21055内。当仓夹具21050附接到装载单元21030时,夹子21056围绕附接突出部21042折曲。当仓夹具21050完全附接到装载单元21030时,夹子21056弹性地卡扣或朝向它们的未折曲构造返回并且将附接突出部21042保持在凹陷部21052中。The
除上述之外,当夹子21056与附接突出部21042接合并且附接突出部21042完全坐置在凹陷部21052中时,仓夹具21050正确地附接到装载单元21030。也就是说,装载单元21030不包括被构造成检测仓夹具21050是否正确地附接到装载单元21030的感测系统。现在转到图28至图32,装载单元21130包括系统,该系统被构造成检测钉仓夹具21150是否正确地附接到装载单元21130的砧座夹具21140,如下面更详细地描述的。In addition to the above, when the
装载单元21130包括当钉仓夹具21150正确地附接到装载单元21130时接通或闭合的电路。电路与外科器械系统的微处理器或控制器通信。控制器位于外科器械系统的柄部中;然而,控制器可以位于外科器械系统的任何合适的零件中,例如装载单元21130。另选地,控制器可以位于外科器械组件的壳体中,该壳体附接到机器人外科系统和/或在机器人外科系统本身中。在任何情况下,控制器与电动马达通信,该电动马达驱动外科器械系统的钉击发系统。The
当控制器检测到钉仓没有正确地附接到装载单元21130时,除上述之外,控制器可以防止电动马达驱动钉击发系统通过钉击发冲程。在至少一个此种情况下,控制器可以打开电源(例如诸如电池)和电动马达之间的开关,以防止电力供应到电动马达。当控制器检测到钉仓21150正确地附接到装载单元21130时,控制器可以准许电动马达当由外科器械系统的使用者致动时从电池接收电力并且驱动钉击发系统通过钉击发冲程。在至少一个此种情况下,控制器可以例如闭合电池和电动马达之间的开关。In addition to the above, the controller may prevent the electric motor from driving the staple firing system through the staple firing stroke when the controller detects that the staple cartridge is not properly attached to the
装载单元21130的电路包括延伸穿过装载单元21130的轴部分的导体21147(图30和图32),以及定位在附接突出部21142中的每个周围的接触件21146。导体21147中的每个电联接到微处理器和接触件21146。钉仓21150包括电路的一部分,当钉仓21150与附接突出部21142完全接合时,该电路的一部分使电路接通。参考图31,钉仓21150中的电路的一部分包括位于凹陷部21052中的每个中的接触件21159和在接触件21159之间延伸并与接触件21159电联接的导体或迹线21157。夹子21056被构造成将钉仓夹具21150的接触件21159保持抵靠围绕附接部分21142延伸的接触件21146。在至少一种情况下,夹子21056由导电材料构成并且与迹线21157通信。在此类情况下,夹子21056是钉仓21150中的电路的零件。在任何情况下,当钉仓夹具21150与装载单元21130脱离时,电路断开或打开,并且微处理器可以检测到钉仓夹具21150不再附接到装载单元21130。The electrical circuit of the
除上述之外,如果仅接触件21159中的一个与其相应的接触件21146接合,则控制器可以确定钉仓夹具21150不正确地附接到装载单元21130。在此类情况下,电路将处于打开状态,因此,微处理器将把不正确地组装的钉仓夹具21150视为缺失的仓夹具21150,并防止电动马达被致动以执行钉击发冲程。在各种情况下,外科器械系统可以包括指示灯和/或反馈系统,其向外科器械系统的使用者传递钉仓夹具检测电路尚未闭合的情况。响应于此,使用者可以调查情况并正确地坐置钉仓夹具21150以闭合检测电路。In addition to the above, if only one of the
如图31所示,导体21157侧向延伸穿过仓夹具21150。当击发构件被向远侧推进通过仓夹具21150时,击发构件可以横切和/或断开导体21157并打开夹具检测电路。此时,控制器可以准许电动马达被操作以向远侧推进击发构件,直到击发构件缩回到其未击发位置。在击发构件已缩回到其未击发位置之后,控制器然后可以防止电动马达的重新操作,直到未用完的仓夹具21150正确地附接到装载单元21130。因此,装载单元21130的电路可以用作缺失的仓闭锁件、不正确地附接的仓闭锁件和用完的仓闭锁件。As shown in FIG. 31,
除了上述之外或代替上述内容,滑动件21170可以包括导电部分,当滑动件21170处于其未击发位置时,该导电部分电连接侧向夹具接触件21159和/或导电夹子21056。在至少一种情况下,滑动件21170包括从滑动件21170的一个侧向侧延伸到另一个的导体和/或迹线。当滑动件21170向远侧推进时,滑动件21170的导电部分不再与接触件21159和/或夹子21056电通信,并且夹具检测电路打开。在夹具组件还包括导体21157的程度上,可以切割或断开导体21157以打开如上所述的夹具检测电路。在各种情况下,例如,在导体21157被切割或断开的同时,滑动件21170可以从夹具检测电路位移。在任何情况下,导电滑动件21170可以提供用完的仓闭锁件。In addition to or in lieu of the above, the
在各种另选实施方案中,当击发构件向远侧推进时,加载单元的电路闭锁件不被横切。现在转向图34,装载单元21230的钉仓夹具21250包括仓主体21251、限定在仓主体21251中的多个钉腔体21258,以及限定在仓主体21251中的纵向狭槽21259,该狭槽被构造成接收击发构件的一部分。类似于钉仓夹具21150,钉仓夹具21250包括装载单元电路的一部分。钉仓夹具21250中的电路的一部分包括限定在凹陷部21052中的电接触件,例如诸如接触件21159,以及设置在纵向狭槽21251的相对侧上的顺应性电接触件21257。每个顺应性接触件21257经由例如延伸通过仓主体21251的导体或迹线与接触件21052电通信。In various alternative embodiments, the circuit lockout of the loading unit is not transected when the firing member is advanced distally. Turning now to FIG. 34, the
顺应性接触件21257被构造成在钉仓夹具21250组装到装载单元21250时接合装载单元21230的砧座夹具21240。更具体地,顺应性接触件21257接合限定在砧座夹具21240中的导电通路21247,其电连接顺应性接触件21257,并且此时电路已经闭合。顺应性接触件21257保持恒定地与导电通路21247接合,即当仓夹具21250处于打开位置时,当仓夹具21250处于闭合位置时,以及当仓夹具21250在其打开位置和闭合位置之间运动时。当击发构件向远侧推进时,击发构件穿过限定在接触件21257之间的间隙,因此,电夹具检测电路不被横切。此种布置可以提供缺失的仓夹具闭锁件和/或不正确地附接的仓夹具闭锁件。The
除上述之外,顺应性接触件21257可以包括弹簧,该弹簧被构造成将钉仓夹具21250偏压到打开位置。当钉仓夹具21250移动到其闭合位置时,顺应性接触件21257在钉仓夹具21250和砧座21240之间被压缩。顺应性接触件21257连同电夹具检测电路的其它部分与缝合组件的金属或导电部分电绝缘,以便维持夹具检测电路的完整性并防止夹具检测电路短路。In addition to the above, the
除了诸如上述闭锁件之类的电或电子闭锁件之外或代替诸如上述闭锁件之类的电或电子闭锁件,例如,装载单元可以包括机械闭锁件,如果钉仓夹具没有正确附接到装载单元,则该机械闭锁件防止击发系统执行钉击发冲程。现在转到图33,钉仓夹具21150包括滑动件21170,当击发构件21160在钉击发冲程期间向远侧推进时,该滑动件21170被击发构件21160(图30)向远侧推动。钉仓夹具21150还包括闭锁构件21172,该闭锁构件21172可枢转地与仓夹具21150的仓主体21151接合。如美国专利申请公布号2012/0286021中所述,在滑动件21170已经在击发冲程期间至少部分地向远侧推进之后,闭锁构件21172被向内偏压到闭锁位置,这防止了仓夹具21150被重新击发。In addition to or in place of electrical or electronic latches such as the latches described above, for example, the loading unit may include a mechanical latch if the cartridge clamp is not properly attached to the load unit, the mechanical latch prevents the firing system from performing the staple firing stroke. Turning now to FIG. 33, the
虽然闭锁构件21172可以阻挡击发构件21160的远侧推进,但是如上所述,在某些情况下,击发构件21160可能够推动通过闭锁构件21172和在闭锁构件21172之间滑动。作为改善,闭锁构件21172中的一个或二者可以包括朝向击发构件21160向内延伸的闩锁或钩。当在滑动件21170已经向远侧推进之后闭锁构件21172向内偏压时,闩锁或钩可以在击发构件21160缩回到其未击发位置时接合在击发构件21160中限定的孔隙。一旦闩锁或钩定位在击发构件孔隙中,它们就可以防止击发构件21160向远侧推进通过已经用完的仓。此时,必须替换钉仓以解锁击发构件21160。While the blocking
如上所述,可附接的钉仓夹具可以在打开位置和闭合位置之间运动,以将组织夹紧在打开位置和闭合位置之间。设想了其它实施方案,其中钉仓夹具可移除地附接到缝合器械,但是砧座夹具能够在打开位置和闭合位置之间运动。现在转向图35至图38,缝合组件21530包括可附接的钉仓夹具21550,其包括仓主体21551,以及另外的可枢转的砧座夹具21540。缝合组件21530还包括击发构件,例如诸如击发构件21160,其能够向远侧移动以接合砧座夹具21540并将砧座夹具21540移动到闭合位置。更具体地,击发构件21160包括被构造成接合仓夹具21550的第一凸轮构件21162和被构造成接合砧座夹具21540并使砧座夹具21540朝向仓夹具21550移动的第二凸轮构件21164。As described above, the attachable cartridge clamp can be moved between open and closed positions to clamp tissue therebetween. Other embodiments are contemplated in which the cartridge clamp is removably attached to the stapling instrument, but the anvil clamp is movable between open and closed positions. Turning now to FIGS. 35-38 , the stapling
缝合组件21530还包括机械闭锁件21572。闭锁件21572在框架枢轴21232处安装到缝合组件21530的框架。闭锁件21572向远侧延伸并由框架销21533支撑。闭锁件21572包括金属线;然而,闭锁件21572可以由任何合适的材料构成。闭锁件21572还包括限定在闭锁件中的细长凹陷部轨道21576,该轨道被构造成接收从击发构件21160延伸的闭锁销21166。主要参考图35,当闭锁件21572处于其锁定位置时,细长凹陷部轨道21276约束或限制击发构件21160的纵向位移。更具体地,凹陷部轨道21576被构造成准许击发构件21160向远侧推进以使砧座夹具21540在其打开位置和闭合位置之间运动,但是防止击发构件21160向远侧推进以执行击发冲程,除非闭锁件21572移动到其解锁位置,如下所述。The
当钉仓夹具21550附接到缝合组件21530时,如图36所示,仓夹具21550的滑动件21270接触闭锁件21572的远侧臂21574并使闭锁件21572向下偏转到其解锁位置。此时,闭锁件21572已经位移到击发构件21160的闭锁销21166下方,并且因此,击发构件21160可以向远侧推进以执行钉击发冲程,如图37所示。在钉击发冲程期间,击发构件21160将滑动件21270向远侧推离闭锁臂21574,并且闭锁件21572可以返回到其未折曲或锁定的构造。当击发构件21160缩回时,如图38所示,闭锁销21166可以与闭锁件21572接合并向下折曲闭锁件21572以准许击发构件21160返回其未击发位置。值得注意的是,滑动件21270没有与击发构件21160一起缩回,并且因此,即使击发构件21160已经缩回也不能重新解锁闭锁件21572。因此,闭锁件21572可以用作缺失的仓闭锁件和用完的仓闭锁件。When the
现在转向图39至图43,缝合组件21330包括可附接的钉仓夹具21350,其包括仓主体21351,以及另外的砧座夹具21340。缝合组件21330还包括击发构件,例如诸如击发构件21160,其能够向远侧移动以接合砧座夹具21340和仓夹具21350。更具体地,击发构件21160包括被构造成接合仓夹具21350的第一凸轮构件21162和被构造成接合砧座夹具21340的第二凸轮构件21164,当击发构件21160向远侧推进时,第一凸轮构件21162和第二凸轮构件21164闭合夹具21340和21350。Turning now to FIGS. 39-43 , the stapling
缝合组件21330还包括机械闭锁件21372。闭锁件21372在框架枢轴21232处安装到缝合组件21330的框架。闭锁件21372向远侧延伸并受到框架销21333的约束。闭锁件21372包括金属线;然而,闭锁件21372可以由任何合适的材料构成。闭锁件21372还包括限定在闭锁件中的细长凹陷部轨道21376,其被构造成接收从击发构件21160延伸的闭锁销21166。主要参考图39,当闭锁件21372处于其锁定位置时,细长凹陷部轨道21376约束或限制击发构件21160的纵向位移。更具体地,凹陷部轨道21376被构造成准许击发构件21160向远侧推进以闭合缝合组件21330但是防止击发构件21160向远侧推进以执行击发冲程。The
当钉仓夹具21550附接到缝合组件21530时,如图40所示,钉仓21350的滑动件21370接触闭锁件21372的远侧臂21374并使闭锁件21372向上偏转到解锁位置。在这一点上,闭锁件21372已经在击发构件21160的闭锁销21166上方位移,并且因此,击发构件21160可以向远侧推进以执行钉击发冲程,如图41所示。在钉击发冲程期间,击发构件21160将滑动件21370从闭锁臂21374下方向远侧推出,并且闭锁件21372可以返回到其未折曲或锁定构造。当击发构件21160缩回时,如图42所示,闭锁销21166可以接合闭锁件21372并向上折曲闭锁件21372以准许击发构件21160返回其未击发位置。值得注意的是,滑动件21370不与击发构件21160一起返回。因此,闭锁件21372可以用作缺失的仓闭锁件和用完的仓闭锁件。When the
参考图43,闭锁件21372的臂21374在纵向狭槽21359的相对侧上侧向间隔开,使得击发构件21160可以在臂21374之间滑动。在此类情况下,臂不被击发构件21160横切。43, the
在外科手术期间,几个装载单元可以与外科缝合系统的柄部一起使用。在至少一种情况下,例如,可以使用第一装载单元,其被构造成应用30mm的钉线,可以使用第二装载单元,其被构造成应用45mm的钉线,并且可以使用第三装载单元,其被构造成应用60mm的钉线。在这些装载单元中的每个包括可替换的仓夹具的情况下,错误的钉仓夹具可以附接到装载单元的情况是有可能的。比如,临床医生可尝试将60mm钉仓夹具附接到被构造成应用30mm钉线的装载单元。因此,从60mm钉仓夹具射出的钉中的一些可能不会被砧座变形和/或组织切口线可能比钉线更长的情况是有可能的。本文所公开的缝合组件和/或装载单元可以包括用于防止错误的钉仓夹具附接到其上的装置,如下面更详细地讨论的。During surgery, several loading units can be used with the handle of the surgical stapling system. In at least one case, for example, a first loading unit can be used that is configured to apply a 30mm staple line, a second loading unit can be used that is configured to apply a 45 mm staple line, and a third loading unit can be used , which is configured to apply a 60mm staple line. Where each of these loading units includes a replaceable cartridge clamp, it is possible that the wrong cartridge clamp may be attached to the loading unit. For example, a clinician may attempt to attach a 60mm staple cartridge clamp to a loading unit configured to apply a 30mm staple wire. Thus, it is possible that some of the staples fired from the 60mm staple cartridge jig may not be deformed by the anvil and/or the tissue incision line may be longer than the staple line. The stapling assemblies and/or loading units disclosed herein may include means for preventing incorrect cartridge clamps from being attached thereto, as discussed in more detail below.
参考图44和图46,除上述之外,限定在仓夹具21250中的凹陷部21052被构造成紧密地接收装载单元21130的附接突出部21142,使得在它们之间存在紧密配合。在至少一种情况下,第二装载单元21242’的附接突出部21242’(图45)小于附接突出部21142,并且对应地,用于与第二装载单元21242’一起使用的第二仓夹具的凹陷部小于凹陷部21052。为了提供错误校对形式,第二仓夹具的凹陷部太小而不能接收装载单元21130的附接突出部21142,因此,第二仓夹具不能附接到装载单元21130。类似地,现在转向图45,仓夹具21250的凹陷部21052大于第二装载单元21130’的附接突出部21242’,使得仓夹具21250的夹子21056不能将附接突出部21242’保持在第二装载单元21130’中。因此,不能将仓夹具21250保持在装载单元21130’上。在此类情况下,仓夹具21250和装载单元21130’之间的互连对于仓夹具21250而言太松而不能与装载单元21130’一起使用。44 and 46, in addition to the above, the
在上述情况下,装载单元的附接突出部、钉仓夹具的凹陷部和将钉仓夹具保持到装载单元的弹簧夹子在缝合组件的两侧上具有相同的构造。在其它情况下,在缝合组件的一侧上的附接突出部、凹陷部和/或弹簧夹子不同于在缝合组件的另一侧上的附接突出部、凹陷部和/或弹簧夹子。例如,大的附接突出部、凹陷部和弹簧夹子设置在缝合组件的一侧上,而较小的附接突出部、凹陷部和弹簧夹子设置在另一侧上。此类布置可以增加可用的排列,以防止不正确的钉仓夹具附接到装载单元。In the above case, the attachment protrusions of the loading unit, the recesses of the cartridge clamps, and the spring clips holding the cartridge clamps to the loading unit have the same configuration on both sides of the suturing assembly. In other cases, the attachment protrusions, recesses and/or spring clips on one side of the suturing assembly are different from the attachment protrusions, recesses and/or spring clips on the other side of the suturing assembly. For example, large attachment protrusions, recesses and spring clips are provided on one side of the suture assembly, while smaller attachment protrusions, recesses and spring clips are provided on the other side. Such an arrangement may increase the available arrangement to prevent incorrect cartridge clamps from being attached to the loading unit.
在上述情况下,装载单元的附接突出部、钉仓夹具的凹陷部和弹簧夹子相对于共同的侧向轴线对准。在其它情况下,在缝合组件的一侧上的附接突出部、凹陷部和/或弹簧夹子不与另一侧上的突出部、凹陷部和/或弹簧夹子对准。换句话说,一侧偏离另一侧。此类布置还可以增加可用的排列,以防止不正确的钉仓夹具附接到装载单元。In the above case, the attachment protrusions of the loading unit, the recesses of the cartridge clamps and the spring clips are aligned with respect to a common lateral axis. In other cases, the attachment tabs, recesses and/or spring clips on one side of the suture assembly are not aligned with the tabs, recesses and/or spring clips on the other side. In other words, one side is offset from the other. Such an arrangement may also increase the available permutations to prevent incorrect cartridge clamps from being attached to the loading unit.
除上述之外,预期可以提供装载单元的套件,其中套件的每个装载单元可以被构造成使得仅旨在与装载单元一起使用的仓夹具可以正确地附接到装载单元。In addition to the above, it is contemplated that a kit of loading units may be provided, wherein each loading unit of the kit may be configured such that only magazine clamps intended for use with the loading unit may be properly attached to the loading unit.
现在转到图47和图48,钉仓夹具21050包括近侧肩部21058,当仓夹具21050附接到装载单元21030时,近侧肩部21058定位成靠近装载单元21030的框架。例如,由于突出部21042、凹陷部21052和夹子21056之间的紧密配合,仓夹具21050被保持就位,使得仓夹具21050的肩部21058不中断击发构件21160向远侧前进。更具体地,肩部21058不中断击发构件21160的第一凸轮构件21162。在将不正确的钉仓附接到仓夹具21050的情况下,在某些情况下,不正确的仓夹具的近侧肩部可中断第一凸轮构件的远侧前进,并且因此防止击发构件21160用不正确的钉仓执行击发冲程。现在转向图49,钉仓夹具21450是与装载单元21030一起使用的不正确的钉仓夹具。尽管钉仓夹具21450已经附接到装载单元21030,但是近侧肩部21458防止击发构件21060向远侧推进。Turning now to FIGS. 47 and 48 , the
除上述之外,钉仓夹具的近侧肩部可以包括尖锐或突兀的拐角。在至少一个此种情况下,近侧肩部例如不包括倒角或引入端。In addition to the above, the proximal shoulder of the cartridge clamp may include sharp or sharp corners. In at least one such instance, the proximal shoulder, for example, does not include a chamfer or lead-in.
在各种情况下,钉仓夹具的近侧肩部可以被构造成如果夹紧在钉仓夹具和相对的砧座夹具之间的组织太厚则阻挡钉击发构件向远侧推进。在此类情况下,钉仓夹具将不会完全闭合,并且钉仓夹具的近侧肩部将定位在钉击发构件的前方。此种布置将包括组织厚度闭锁件;然而,在钉仓夹具还没有移动到其夹紧位置的情况下,此种布置也可以用作组织夹紧闭锁件。In various cases, the proximal shoulder of the cartridge clamp can be configured to block distal advancement of the staple firing member if the tissue clamped between the cartridge clamp and the opposing anvil clamp is too thick. In such a case, the cartridge clamp would not be fully closed and the proximal shoulder of the cartridge clamp would be positioned in front of the staple firing member. Such an arrangement would include a tissue thickness lockout; however, this arrangement could also function as a tissue clamping lockout without the cartridge clamp being moved to its clamping position.
除了上述之外或代替上述内容,可以利用外科器械系统的电子或软件闭锁件来防止在不正确的钉仓夹具附接到外科器械系统的情况下击发驱动器执行钉击发冲程。在各种情况下,如上所述,夹具检测电路的一部分可以延伸通过钉仓夹具,并且在至少一种情况下,外科器械系统的控制器可以被构造成评估延伸通过钉仓夹具的夹具检测电路的部分,以确定附接到外科器械系统的钉仓夹具是否是与外科器械系统一起使用的合适的钉仓夹具。在至少一种情况下,第一钉仓夹具的夹子21056具有例如与第二钉仓夹具的夹子21056可检测地不同的电特性,诸如电阻或阻抗。In addition to or in lieu of the above, an electronic or software latch of the surgical instrument system may be utilized to prevent the firing driver from performing the staple firing stroke if an incorrect cartridge clamp is attached to the surgical instrument system. In various cases, as described above, a portion of the clip detection circuit can extend through the cartridge clip, and in at least one case, the controller of the surgical instrument system can be configured to evaluate the clip detection circuit extending through the cartridge clip section to determine whether a cartridge holder attached to a surgical instrument system is a suitable cartridge holder for use with the surgical instrument system. In at least one instance, the
再次参考图22、图26和图28,仓夹具移除工具21090可以用于将仓夹具从装载单元拆卸。美国专利申请公布号2012/0286021更详细地讨论了仓移除工具。美国专利申请公布号2012/0286021更详细地讨论了仓移除工具。Referring again to Figures 22, 26, and 28, a magazine
期望采用具有外科缝合器械(其具有可替换钉仓组件)的闭锁系统。例如,在使用者忘记将钉仓安装到没有此种闭锁系统的器械中的情况下,外科器械的击发构件可用于切割患者的组织而不将其缝合。此类情况是不期望的。在又一个示例中,在使用者将用完的或部分用完的钉仓安装到器械中并且没有闭锁系统的情况下,外科器械的击发构件将类似地切割但不缝合,或仅部分缝合患者的组织。此类情况也是不期望的。因此,期望可以自动闭锁击发构件以防止击发构件在端部执行器内被推进的外科器械。It is desirable to employ a lockout system with a surgical stapling instrument with a replaceable cartridge assembly. For example, the firing member of a surgical instrument can be used to cut a patient's tissue without stapling it in the event a user forgets to install a staple cartridge into an instrument that does not have such a latching system. Such a situation is not desired. In yet another example, where the user installs a spent or partially spent staple cartridge into the instrument and there is no latching system, the firing member of the surgical instrument will similarly cut but not sut, or only partially sut the patient organization. Such a situation is also undesirable. Accordingly, a surgical instrument that can automatically lock the firing member to prevent the firing member from being advanced within the end effector is desired.
现在转到图50和图51,示出了包括缺失的仓和用完的仓闭锁系统的外科器械系统25100。系统25100包括击发构件25110、钉仓组件25120和砧座夹具25130。击发构件25110包括远侧呈现的切割部分25111,当被推进通过外科器械系统25100的端部执行器部分时,切割部分被构造成切割组织。击发构件25110被构造成通过将滑动件25121纵向推进通过钉仓组件25120而将多个钉从钉仓组件25120朝向砧座夹具25130部署。在钉击发冲程期间,滑动件25121能够从近侧未击发位置移动到远侧完全击发位置。在钉击发冲程完成之后,击发构件25110缩回。滑动件25121不与击发构件25110缩回。然而,设想了其中滑动件25121至少部分缩回的实施方案。Turning now to FIGS. 50 and 51, a
外科器械系统25100还包括闭锁构件25140。当外科器械系统25100中不存在仓或外科器械系统25100中存在用完的或部分用完的仓时,闭锁构件25140被构造成防止击发构件25110被推进通过钉击发冲程。闭锁构件25140包括近侧部分25141,该近侧部分25141可枢转地安装到系统25100的框架部分的脊柱销25101。闭锁构件25140还包括锁定面或肩部25142(其构造成卡扣击发构件25110),以及可偏转部分25143。当钉仓组件安装在系统25100内时,闭锁构件25140能够在锁定位置(图50)和解锁位置(图51)之间移动或偏转。当钉仓组件未安装在系统25100内时,闭锁构件25140被弹簧偏压到锁定位置,如下面更详细地讨论的。当用完的或部分用完的钉仓组件安装在系统25100内时,闭锁构件25140也弹簧偏压到锁定位置,如下面更详细地讨论的。
当闭锁构件25140处于其锁定位置时,如图50所示,安装在击发构件25110上的击发构件销25113被构造成邻接闭锁构件25140的锁定面25142,其防止击发构件25110向远侧推进。为了将闭锁构件25140从锁定位置移动到解锁位置,必须将未用完的,准备好击发的钉仓组件正确地安装在系统25100内。更具体地,未用完的,准备好击发的钉仓组件的滑动件25121处于其近侧未击发位置,并且当此种钉仓组件安装到系统25100中时,滑动件25121使可偏转部分25143向下偏转或弯曲进入其解锁位置。当闭锁构件25140处于其解锁位置时,参考图51,击发构件销25113清楚地推进超过锁定面25142,从而允许击发构件25110向远侧推进以在击发冲程期间部署钉并且切割组织。When the blocking
如在图50和图51中可以看到的,当闭锁构件25140处于其锁定位置时,准许击发构件25110的一些纵向移动。当闭锁构件25140处于其锁定位置时,这种纵向移动自由度允许击发构件25110向远侧推进以闭合系统25100的夹具并向近侧移动以防止夹具重新打开。例如,操纵系统25100的夹具对于装载和/或卸载钉仓可能是必需的。As can be seen in Figures 50 and 51, some longitudinal movement of the firing
如上所述,当击发构件25110在击发冲程之后缩回时,滑动件25121不与击发构件25110一起返回。当击发构件25110缩回时,击发构件销25113使可偏转部分25143偏转或弯曲到其解锁位置,从而准许销25113穿过锁定面25142并返回到原始位置。一旦销25113缩回穿过锁定面25142,闭锁构件25140就弹回或返回到其锁定位置,以防止用安装在系统25100内的用完的钉仓重复击发。击发构件25110可以进一步缩回,使得系统25100的夹具然后可以从缝合组织松开。As described above, the
现在参考图52至图54,示出了另一种外科器械系统25200。系统25200包括另一种类型的缺失仓和用完的仓闭锁件布置。系统25200包括击发构件25210和钉仓组件25220。击发构件25210包括远侧呈现的切割部分25211,其被构造成在被推进通过系统25200时切割组织。击发构件被构造成通过将滑动件25221纵向推进穿过钉仓组件25220而从钉仓组件25220部署多个钉。在钉击发冲程期间,滑动件25221能够从近侧未击发位置移动到远侧完全击发位置。滑动件25221不与击发构件25210一起缩回;然而,设想了其中滑动件25221至少部分缩回的实施方案。Referring now to Figures 52-54, another
外科器械系统25200还包括闭锁构件25240。当系统25200内不存在仓或系统25200内存在用完的或部分用完的仓时,闭锁构件25240被构造成防止击发构件25210被推进通过其钉击发冲程。闭锁构件25240包括可旋转地安装到系统25200的第一脊柱销25201的第一或近侧部分25241。例如,脊柱销25201可从系统25200的轴框架或脊柱延伸。闭锁构件25240还包括第二部分25242、第三或卡扣部分25243,以及第四或远侧部分25245。闭锁构件25240能够在锁定位置(图52和图54)和解锁位置(图53)之间移动。当钉仓组件未正确地安装在系统25200内时,闭锁构件25240被弹簧偏压到锁定位置。当用完的或部分用完的钉仓组件安装在系统25200内时,闭锁构件25240也被偏压到锁定位置。
当闭锁构件25240处于其锁定位置时,如图52所示,安装在击发构件25210上的击发构件销25213被构造成邻接闭锁构件25240的锁定面或肩部25244。由于锁定面25244,阻挡击发构件25210向远侧推进超过该位置。为了将闭锁构件25240从其锁定位置移动到其解锁位置,必须在系统25200内安装未用完的,准备好击发的钉仓组件。未用完的,准备好击发的钉仓组件包括处于近侧未击发位置的滑动件25221。When the blocking member 25240 is in its locked position, as shown in FIG. Due to the
滑动件25221包括磁体25226,该磁体25226的一个极“P1”面向闭锁构件25240的远侧部分25245,另一个极“P2”远离闭锁构件25240的远侧部分25245。闭锁构件25240的远侧部分25245包括设置在其上的磁体25246。磁体25246取向成极“P1”面向滑动件磁体25226的相同的极“P1”,并且另一个极“P2”远离滑动件磁体25226。磁体25226的极P1和磁体25246的极P1彼此排斥。当滑动件25221处于其近侧未击发位置(图53)时,这种关系产生悬浮效应,其将闭锁构件25240向上推动或排斥到其解锁位置,从而将锁定面25244提升离开击发构件25210的销25213,以准许销25213推进超过锁定面25142。然后可以将击发构件25210向远侧推进以在击发冲程期间部署钉并且切割组织。The
当击发构件25210在其击发冲程之后缩回时,销25213被构造成接触远侧部分25245的倾斜面以将远侧部分25245并因此将闭锁构件25240朝向其解锁位置推动,从而准许销25213在返回到原始位置时穿过锁定面25244。一旦销25213穿过锁定面25244,闭锁构件25240就弹回或返回到其锁定位置,以防止用安装在系统25100内的用完的或部分用完的钉仓重复击发冲程。When the firing
类似于图50和图51中所示的系统25100,闭锁构件25240被构造成准许击发构件25210在距离“y”内移动,以准许当击发构件25210被用于夹紧和松开功能时夹紧和松开夹具。销25213以及因此击发构件25210可以在闭锁构件25240的卡扣部分25243内向近侧和向远侧移动,即使钉仓从系统25100缺失和/或用完的钉仓定位在系统25100内。Similar to the
图55至图60中示出了另一个外科器械系统25300。系统25300包括另一种类型的闭锁件布置,其中当仓未安装在系统25300内时,系统25300被构造成被闭锁。当在系统25300内安装用完或部分用完的仓时,该系统还被构造成被闭锁。系统25300包括击发构件25310和钉仓组件25320。击发构件25310包括远侧呈现的切割部分25311,该切割部分25311被构造成在推进通过系统25300时切割组织。击发构件25310被构造成通过推进滑动件25330(图56)纵向通过钉仓组件25320而从钉仓组件25320部署多个钉。在击发冲程期间,滑动件25330能够在近侧未击发位置和远侧完全击发位置之间移动。在各种情况下,滑动件25230不会与击发构件25310一起缩回;然而,设想了其中滑动件25230至少部分缩回的实施方案。Another
外科器械系统25300还包括闭锁构件25340。当系统25300内不存在仓或系统25300内存在用完或部分用完的仓时,闭锁构件25340被构造成防止击发构件25310被推进通过钉击发冲程。闭锁构件25340在许多方面类似于闭锁构件25140、25240。参考图58至图60,闭锁构件25340包括可旋转地安装到系统25300的第一脊柱销25301的第一或近侧部分25341。另选地,近侧部分25341可以固定地安装到系统25300的脊柱25301。闭锁构件25340还包括第二部分25342、第三或卡扣部分25343,以及第四或远侧部分25345。闭锁构件25340能够在锁定位置(图58和图60)和解锁位置(图59)之间移动。当钉仓组件未安装在系统25300内时,闭锁构件25340被弹簧偏压到其锁定位置。当用完的或部分用完的钉仓组件安装在系统25300内时,闭锁构件25340也被偏压到其锁定位置。
钉仓组件25320包括滑动件25330和多个驱动器25328,该驱动器25328被构造成在钉击发冲程期间在由滑动件25330的斜面25330A、25330B、25330C和25330D驱动时射出钉。钉仓组件25320还包括控制构件,当滑动件25330在其钉击发冲程期间向远侧推进时,该控制构件能够通过滑动件25330在未用完位置和用完位置之间移动。当钉仓25320被装载到外科器械系统25300中时控制构件处于其未用完位置,并且当未用完的钉仓组件25320被装载到外科器械系统25300中时,控制构件被构造成将闭锁构件25340从其锁定位置移动到其解锁位置。近侧驱动器25325的第一构造在图55和图57中示出。近侧驱动器25325包括驱动器楔形部分25326和磁性部分25327。当近侧驱动器25325处于其未用完位置并且滑动件25330处于其未击发位置时(图59),驱动器楔形部分25326定位在滑动凹口25331内并且磁性部分25327足够靠近远侧部分25327以吸引远侧部分25327以将闭锁构件25340移动或提升到其解锁位置。The
在图59和图60中示出了类似的近侧驱动器构造。近侧驱动器25325’包括驱动器楔形部分25326’和磁性部分25327’。近侧驱动器25325’的楔形部分25326’位于近侧驱动器25325’的侧面上。当近侧驱动器25325’处于其未用完位置并且滑动件25330处于其未击发位置时(图59),驱动器楔形部分25326’位于滑动件凹口25331内并且磁性部分25327’足够靠近远侧部分25327’以吸引远侧部分25327’将闭锁构件25340移动到其解锁位置。当驱动器楔形部分25326’位于滑动件凹口25331内时,磁性部分25327’被构造成将闭锁构件25340保持在其解锁位置。当滑动件25330从其未击发位置向远侧推进时,滑动件25330驱动近侧驱动器25325’,使得驱动器楔形部分25326’被驱动脱出滑动件凹口25331。因此,磁性部分25327’不再足够靠近闭锁构件25340以将闭锁构件保持在其解锁位置,因此,闭锁构件被弹簧偏压到其锁定位置(图60)。基准“D”被定义为滑动件25330的顶部表面,并且当楔形部分25326’的底部与基准D对准或在基准D上方时,远侧部分25345和磁性部分25327’之间的磁性关系是不足以将闭锁构件25340保持在其解锁位置,从而释放闭锁构件25340。Similar proximal driver configurations are shown in FIGS. 59 and 60 . The proximal driver 25325' includes a driver wedge portion 25326' and a magnetic portion 25327'. The wedge-shaped portion 25326' of the proximal driver 25325' is located on the side of the proximal driver 25325'. When the proximal driver 25325' is in its unused position and the
一旦闭锁构件25340已经释放到其锁定位置(图60)并且已安装的仓组件25320已经至少部分地用完(图60),则防止系统25300重新击发相同的仓组件25320。当击发构件25310缩回时,闭锁销25312骑在远侧部分下方,以使闭锁构件25340暂时移开,直到闭锁销25312到达卡扣部分25343。当闭锁销25312到达卡扣部分25343时,闭锁构件25340弹回或返回其锁定位置。当处于其用完位置时,磁性部分25327’不会将闭锁构件25340拉入其解锁位置。在各种情况下,当近侧驱动器25325’被滑动件25330移动到其用完位置时,近侧驱动器25325’可以压配合方式接合钉仓组件25320,以防止近侧驱动器25325’朝向其未用完位置下落。此种布置可防止闭锁构件25340被错误地解锁。除了用完的仓组件之外,没有仓安装在系统25300内迫使闭锁构件进入其锁定位置。仅仅没有近侧驱动器完全防止闭锁构件25340移动到其解锁位置。Once the latching
控制构件25325、25325’由滑动件25330驱动,并且可以被称为驱动器;然而,它们不驱动钉。以这种方式,控制构件25325、25325’包括“假”驱动器。也就是说,可预期钉仓组件的最近侧钉驱动器可以用作控制构件。The
另一种外科器械系统在图61至图63中示出。系统25400包括钉仓组件25410、闭锁电路系统25420和闭锁构件25430。闭锁构件25440固定地附接到系统25400的脊柱部分25401。闭锁构件25430还包括例如弹簧构件,并且朝向其锁定位置偏压(图63)。当闭锁构件25430处于其锁定位置时,闭锁构件25430的钩部分25431被构造成在外科器械或临床医生试图将击发构件推进超过闭锁构件25440而没有安装在系统25400内的未用完的钉仓组件的情况下卡扣击发构件。Another surgical instrument system is shown in FIGS. 61-63 .
为了将闭锁构件25440移动到其解锁位置,使得击发构件可以在钉击发冲程期间被推进通过钉仓组件25410,则采用电磁体25421。电磁体25421设置在系统25400的脊柱部分25401上,但是可设置在系统25400内的任何合适的位置处。导体沿脊柱部分25401定位在系统25400内,例如,以给电磁体25421供电。包围电磁体25421及其电源的闭锁电路系统25420延伸通过钉仓组件25410。如下所讨论的,当电路25420接通或闭合时,电磁体25421被供电。当电路未接通或打开时,电磁体25421不通电。还如下面所讨论的,在电路25420打开的情况下,系统25400中存在用完的或部分用完的仓。在电路25420打开的另一种情况下,系统25400中没有仓。To move the latching member 25440 to its unlocked position so that the firing member can be advanced through the
闭锁电路系统25420包括从电磁体25421延伸到位于系统25400内的一对电接触件25423的导体25422。例如,电接触件25423定位在系统25400的夹具内,诸如接收钉仓组件25410的通道部分。钉仓组件25410还包括导体腿形件25425,当钉仓组件25410完全坐置在夹具的通道部分中时,导体腿形件被构造成接合接触件25423。导体腿形件25425是限定在钉仓组件25410内的电迹线25424的零件。导体腿形件25425设置在仓组件25410的近侧面25412上。同样设置在近侧面25412上的是电迹线25424的可切断部分25426,其延伸越过钉仓组件25410的狭槽25411。击发构件的切割边缘被构造成在击发构件的钉击发冲程期间切断或切入可切断部分25426。Latching
当安装仓组件并且未用完时,除上述之外,可切断部分25426未被切断并且闭锁电路25420完成或闭合。当闭锁电路25420接通时(图62),电磁体25421接收电力,迫使闭锁构件25430到其解锁位置,从而准许击发构件穿过。在击发构件的击发冲程期间切断或切割可切断部分25426之后,外科器械检测到未接通的电路。未接通或打开的电路指示钉仓组件25410处于错误构造。这可由于安装了用完或部分用完的仓或没有在系统25400内安装仓。当电路25420未接通时(图63),例如,在错误构造中,电磁体25421断电并将闭锁构件25430释放到其锁定位置(图63)。When the cartridge assembly is installed and not used up, in addition to the above, the
当用完的钉仓组件25410从外科器械系统25400移除时,闭锁电路25420保持在打开状态,并且电磁体25421保持未供电。当未用完的钉仓组件25410完全坐置在系统25400中时,闭锁电路25420再次闭合并且电磁体25421被重新供电以解锁闭锁构件25430。值得注意的是,如果钉仓组件25410未完全坐置在系统25400中,则腿形件25425将不与接触件25423接合,并且闭锁电路25420将保持在打开的未供电状态。When the spent
图64和图65中示出了另一种外科器械系统25500。系统25500包括钉仓25501,该钉仓25501包括能够在未击发位置和击发位置之间移动的滑动件25510。击发构件25503被构造成将滑动件25510从其未击发位置移动到其击发位置,以经由斜面25511部署存储在仓25501内的多个钉(未示出)。系统25500还包括电路25520,其被构造为向外科器械和/或系统25500的使用者指示安装在系统25500内的仓是否用完或部分用完,或安装在系统25500内的仓是否未用完并准备好击发。当滑动件25510处于其未击发位置时,滑动件25510接通电路25520,并且当滑动件25510处于其击发或部分击发位置时,滑动件25510不接通电路25520并且电路25520打开。Another
闭锁电路25520包括例如与外科器械柄部电通信的一对导体25521,以及定位在被构造成支撑钉仓25501的外科器械系统25500的夹具部分内的一对电接触件25522。电接触件25522定位成使得当钉仓25501完全坐置在系统25500中并且滑动件25510处于其未击发位置时(图65),设置在滑动件25510的近侧面25512上的对应的垫或接触件25523接触电接触件25522。栓系部分或导体25524连接或电联接接触件25523并且附接到滑动件25510的近侧中间面25513。除了近侧面25512之外,接触件25522延伸到滑动件的底部面。当滑动件25510处于其未击发位置时,接触件25523与闭锁电路25520接合,并且接通闭锁电路25520指示未击发的,准备好击发的钉仓。当闭锁电路25520未接通时,可以使用软件和/或诸如本文所公开的那些的机械特征来闭锁外科器械。在至少一种情况下,闭锁电路25520与外科器械系统255500的控制器进行信号通信,该控制器在闭锁电路25520处于闭合状态时向击发驱动器的电动马达供应电力,并且防止当闭锁电路25520打开时向电动马达供应电力。The
在图66至图70中示出了系统25600的击发构件闭锁布置。系统25600包括击发构件25610、闭锁件25620和轴脊柱25601。轴脊柱25601容纳闭锁件25620和击发构件25610。击发构件25610包括远侧呈现的切割边缘25611,其被构造成在击发构件25610的钉击发冲程期间切断组织。当闭锁件25620被激活时,闭锁件25620被构造成卡扣击发构件25610并且从而准许击发构件25610穿过。除上述之外,当未用完的钉仓未定位在系统25600中时,闭锁件25620可以由系统25600的控制器激活。The firing member latching arrangement of the
闭锁件25620包括螺线管25621和包括第一连杆25623和第二连杆25624的机械联接装置。连杆25623、25624附接在枢轴25622处。螺线管25621位于在脊柱25601内,使得螺线管25621可以向枢轴25622附近的联接装置施加力。闭锁件25620在图66和图67中示出处于其偏压的锁定位置。闭锁件25620还包括锁定主体或凸轮板25625,其可枢转地与第二连杆25624的端部联接。当螺线管25621处于其未致动的构造时,如图66和图67所示,凸轮板25625被偏压到刀带窗口25612中以卡扣击发构件25610。The
在各种情况下,在击发构件25610中提供多个窗口。另一个窗口,诸如窗口25614,可包括另一个近侧表面。窗口25614可用作中间闭锁件以在操作的中间锁定击发构件25610。在诸如刀结合的情况下,可触发螺线管25621以将闭锁件25620释放到其锁定位置,以防止击发构件25610的进一步致动。在各种情况下,击发构件25610中的窗口的远侧表面可被构造成使得当击发构件25610向近侧缩回时,凸轮板25625可在远侧表面上滑动以防止在击发构件25610向近侧移动时锁定击发构件25610。在其它情况下,可期望在击发构件25610向近侧移动时锁定击发构件25610。In various cases, multiple windows are provided in the firing
在一些情况下,闭锁件可以构造成准许在一个方向上移动但是防止在另一个方向上移动。例如,当击发构件25610的远侧移动已被闭锁时,击发构件25610的轻微缩回可能是期望的。当在此类情况下向近侧缩回时,促使击发构件25610结合的区域中的组织可自然地解压缩,并且在等待组织解压缩的限定时间段之后,可激活螺线管25621以将闭锁件25620移动到其解锁位置(图68和图69),因此准许击发构件25610再次向远侧推进。In some cases, the latch may be configured to permit movement in one direction but prevent movement in the other direction. For example, when distal movement of the firing
图68至图70示出了闭锁件25620处于其解锁位置。在比较图66和图67与图68至图70时,可以看出,当致动时,螺线管25621将机械联接装置移动到共线构造,以将凸轮板25625滑出或迫使离开窗口25612以解锁击发构件25610。当螺线管25621移动机械联接装置时,滑块支撑件25603设置在脊柱25601内以引导凸轮板25625。例如,滑块支撑件25603在至少一种情况下控制凸轮板25625移动到线性路径。Figures 68-70 show the
本文公开了各种实施方案,其包括闭锁件,该闭锁件被构造成在某些情况下防止击发构件向远侧推进。在许多情况下,闭锁件足以阻挡击发构件的远侧推进。在一些情况下,可期望具有多于一个的被构造成阻挡击发构件的远侧推进的闭锁件。在此类情况下,主要闭锁件和次级闭锁件可以阻挡击发构件的远侧推进。如下面更详细描述的,由于主要闭锁件被致动,可以致动次级闭锁件。例如,主要闭锁件可以防止击发构件的远侧推进,因为装载单元缺失钉仓夹具,钉仓夹具不正确地附接到装载单元,和/或钉仓夹具先前已经至少部分地击发,并且当击发构件的远侧位移受到主要闭锁件的阻挡时,可以致动次级闭锁件以辅助主要闭锁件阻挡击发构件的远侧推进。Various embodiments are disclosed herein that include a lockout configured to prevent distal advancement of the firing member under certain circumstances. In many cases, the lockout is sufficient to block distal advancement of the firing member. In some cases, it may be desirable to have more than one latch configured to block distal advancement of the firing member. In such cases, the primary and secondary lockouts may block distal advancement of the firing member. As described in more detail below, as the primary latch is actuated, the secondary latch may be actuated. For example, the primary lockout may prevent distal advancement of the firing member because the loading unit is missing a cartridge clip, the cartridge clip is improperly attached to the loading unit, and/or the cartridge clip has previously been at least partially fired, and when fired When distal displacement of the member is blocked by the primary latch, the secondary latch may be actuated to assist the primary latch in blocking distal advancement of the firing member.
现在转到图82和图83,装载单元包括轴21730和延伸通过轴21730的击发构件系统。击发构件系统包括第一或近侧击发构件21760和第二或远侧击发构件21762。在击发构件系统的钉击发冲程期间,近侧击发构件21760例如通过电动马达和/或手动曲柄向远侧推动。同样地,远侧击发构件21762被近侧击发构件21760向远侧推动。击发构件系统还包括闭锁件21780,闭锁件21780定位在近侧击发构件21760和远侧击发构件21762中间。闭锁件21780被构造成在钉击发冲程期间将击发力从近侧击发构件21760传递到远侧击发构件21762。在通过闭锁件21780传递的力超过在钉击发冲程期间预期的击发力和/或超过预先确定的阈值力的情况下,闭锁件21780移动到锁定构造,如图83所示并且如下文进一步更详细地描述的。Turning now to FIGS. 82 and 83 , the loading unit includes a
闭锁件21780包括锁定臂21782,该锁定臂21782在枢轴21784处可枢转地安装到近侧击发构件21760。锁定臂21782被构造成邻接限定在击发构件21762的近侧端部上的驱动表面21768并向远侧推动击发构件21762。在至少一种情况下,驱动表面21768形成例如锥形表面。闭锁件21780还包括偏压构件或弹簧21785,该偏压构件或弹簧21785被构造成将锁定臂21782抵靠驱动表面21768向内朝向解锁构造偏压,如图82所示。每个锁定臂21782包括从其延伸的销21783,该销21783被构造成将弹簧21785的端部安装到锁定臂21782。当闭锁件21780移动到锁定构造时,除上述之外,锁定臂21782相对于驱动表面21768滑动并向外张开或旋转成与轴21730接合。轴21730包括限定在轴中的齿21781的一个或多个齿条,该齿条21781由锁定臂21782接合并防止近侧击发构件21760向远侧推进。The
除上述之外,当锁定臂21782向外位移时,弹簧21785弹性地拉伸。选择弹簧21785的刚度,使得当从近侧击发构件21760传递到远侧击发构件21762的力低于阈值力时,弹簧21785可将锁定臂21782抵靠驱动表面21768保持在它们的解锁构造中,但当从近侧击发构件21760传递到远侧击发构件21762的力超过阈值力时,准许锁定臂21782向外位移。在近侧击发构件21760和远侧击发构件21762之间传递的力在击发系统从钉仓击发钉时低于阈值力,并且在远侧击发构件21760被缺失的仓和/或用完的仓闭锁件阻挡时高于阈值力。在此类情况下,闭锁件21780响应于另一闭锁件阻挡钉击发系统的推进而部署。换句话说,闭锁件21780可以包括次级闭锁件,其与主要闭锁件配合以阻挡钉击发系统的推进。In addition to the above, when the
在各种情况下,除上述之外,闭锁件21780可以为钉击发系统提供过载保护。比如,钉击发系统可以在击发冲程期间被卡住,并且闭锁件21780可以部署以停止钉击发冲程。在此类情况下,闭锁件21780可以将击发力或击发力的至少一部分传递到轴21730而不是钉仓。因此,闭锁件21780可以防止击发系统和/或钉仓被损坏,或至少进一步被损坏。在此类情况下,闭锁件21780响应于除了预先确定的闭锁件之外的缝合组件的状况而部署。再次参考图82和图83,齿齿条21781与钉击发系统的击发冲程的长度相同或更长,使得闭锁件21780可以在击发冲程期间的任何点处与齿架21781接合。In various circumstances, in addition to the above, the
当从近侧击发构件21760传递到远侧击发构件21762的力下降到力阈值以下时,弹簧21785可以弹性地将锁定臂21782返回到其解锁构造并且与远侧击发构件21762的驱动表面21768接合。此时,如果促使第二闭锁件21780致动的条件已经减弱,则可以完成击发冲程。否则,近侧击发构件21760可以缩回。When the force transmitted from the
现在转向图92至图95,装载单元包括轴24530和延伸通过轴24530的钉击发系统。钉击发系统包括近侧击发构件24560和远侧击发构件24562。例如,在钉击发系统的钉击发冲程期间,近侧击发构件24560通过电动马达和/或手动曲柄向远侧推动。同样地,远侧击发构件24562被近侧击发构件24560向远侧推动。钉击发系统还包括闭锁件24580,该闭锁件24580定位在近侧击发构件24560和远侧击发构件24562中间。闭锁件24580被构造成在钉击发冲程期间将击发力从近侧击发构件24560传递到远侧击发构件24562。在通过闭锁件24580传递的力超过在钉击发冲程期间预期的击发力和/或超过预先确定的阈值力的情况下,闭锁件24580移动到锁定构造,如图94和图95所示。Turning now to FIGS. 92-95 , the loading unit includes a
主要参考图93和图95,闭锁件24580包括例如基本上为C形的构造,其围绕远侧击发构件24562的一部分延伸。闭锁件24580包括锁定臂24584,当闭锁件24580处于其未致动或解锁构造时,锁定臂24584夹持远侧击发构件24562,如图92和图93所示。闭锁件24580还包括驱动突片24582,当近侧击发构件24560在钉击发系统的钉击发冲程期间向远侧驱动时,该驱动突片24582与近侧击发构件24560接触。当闭锁件24580被近侧击发构件24560向远侧推动时,闭锁件24580邻接限定在远侧击发构件24562上的驱动表面24564并向远侧推动远侧击发构件24562。因此,闭锁件24580将推力从近侧击发构件24560通过锁定臂24584传递到驱动表面24564中。Referring primarily to FIGS. 93 and 95 , the
主要参考图92,驱动突片24582与锁定臂24584不共面;相反,驱动突片24582从由锁定臂24584限定的平面侧向延伸。更具体地,驱动突片24582包括至少在闭锁件24580处于其未致动构造时从锁定臂24584翻倒的升高部分。闭锁件24580被构造成只要被传递通过闭锁件24580的推力低于阈值力就保持在其未致动的构造中。完成击发冲程所需的推力低于该阈值力。当传递通过闭锁件24580的推力超过阈值力时,闭锁件24580塌缩成其致动构造,如图94和图95所示。例如,当远侧击发构件24562邻接钉仓中的缺失钉仓和/或用完的钉仓闭锁件时,推力可以超过阈值力。Referring primarily to FIG. 92 , the
再次参考图94和图95,当闭锁件24580移动到其致动构造时,锁定臂24584径向向外张开以接合轴24530。在至少一种情况下,轴24530可以包括限定在轴中的凹陷部24534,该凹陷部24534被构造成接收锁定臂24584。凹陷部24534限定在轴24530中,使得当击发系统的远侧推进被缺失的仓和/或用完的仓闭锁件阻挡时,锁定臂24584与凹陷部24534对准。一旦锁定臂24584位于凹陷部24534中,闭锁件24580也可以阻挡击发系统的远侧推进。在各种情况下,凹陷部24534被定位和布置成在击发驱动器的切割构件切入组织之前停止击发构件24560。当近侧击发构件24560缩回并且施加到闭锁件24580的推动载荷下降到阈值力以下时,闭锁件24580可以弹性地返回到其未致动的构造。此时,可以将未用完的仓放置在装载单元中以使缺失的仓和/或用完的仓闭锁件失效,使得击发系统可以通过其钉击发冲程向远侧推进。然而,在任何时候,近侧击发构件24560均可以缩回以缩回远侧击发构件24562。Referring again to FIGS. 94 and 95 , when the
如果钉击发系统加速太快,则可以致动上述闭锁件的阈值力。换句话说,钉击发系统中的加速度峰值可以导致超过闭锁件的阈值力的力峰值,这导致闭锁件停止钉击发系统。例如,当机械地联接到钉击发系统的击发触发器被挤得太快并且或者电源突然施加到钉击发系统的电动马达时,可以出现此类情况。在至少一种情况下,例如,当施加到电动马达的电力被不正确地调制时和/或当马达控制器中已经发生软件故障时,可以发生加速度峰值。此种加速度峰值和力峰值通常是瞬态的,并且一旦通过钉击发系统传递的力下降回到阈值力以下,就可以完成击发冲程。If the nail firing system accelerates too quickly, the threshold force above which the latch can be actuated. In other words, acceleration peaks in the staple firing system can result in force peaks that exceed the latch's threshold force, which causes the latch to stop the staple firing system. Such a situation can arise, for example, when a firing trigger mechanically coupled to the staple firing system is squeezed too quickly and power is suddenly applied to the electric motor of the staple firing system. Acceleration spikes can occur in at least one situation, for example, when power applied to the electric motor is improperly modulated and/or when a software fault has occurred in the motor controller. Such acceleration peaks and force peaks are generally transient and the firing stroke can be completed once the force delivered by the nail firing system falls back below the threshold force.
现在转到图84,缝合组件包括轴21830和延伸穿过其中的击发构件21860。缝合组件还包括闭锁系统21880。闭锁系统21880包括锁定臂21882,该锁定臂21882围绕枢轴21884可旋转地安装到钉击发构件21860。每个锁定臂21882可在未致动位置和致动位置之间旋转,该未致动位置在图84中以实线示出,致动位置在图84中以虚线示出。闭锁系统21880还包括悬臂弹簧21885,该悬臂弹簧21885安装到钉击发构件21860,该钉击发构件21860被构造成将锁定臂21882偏压到它们的未致动位置。缝合组件还包括安装到击发构件21860的致动器21862,当击发构件21860向远侧移动时,致动器被构造成抵靠轴21830的壳体滑动或拖动。当击发构件21860加速太快或高于阈值水平时,致动器21862和轴21830之间的阻力将减慢或夹持致动器21862并允许击发构件21860相对于致动器21862滑动。在此类情况下,致动器21862和击发构件21860之间的相对运动将锁定臂21882向外驱动成与轴21830中限定的齿21881的齿条接合,以停止、妨碍或减缓钉击发系统的远侧前进。Turning now to Figure 84, the suturing assembly includes a
现在转到图85,缝合组件包括轴21930和击发构件21960,该击发构件21960被构造成在轴21930内平移。缝合组件还包括闭锁系统21980,该闭锁系统21980包括锁定臂21982,该锁定臂21982围绕枢轴21984可旋转地安装到钉击发构件21960。锁定臂21982可在未致动位置和致动位置之间旋转,该未致动位置在图85中以实线示出,致动位置在图85中以虚线示出。闭锁系统21980还包括安装到钉击发构件21960和锁定臂21982的螺旋弹簧21985,该螺旋弹簧21985被构造成将锁定臂21982偏压到其未致动位置。闭锁系统21980还包括安装到锁定臂21982的致动器或重物21989,当击发构件21960向远侧加速时,致动器被或重物构造成惯性地旋转锁定臂21982。当击发构件21960加速太快或高于阈值水平时,由重物21989产生的惯性力足以克服弹簧21985的偏压力并使锁定臂21982旋转成与限定在轴21930中的齿21981的齿条接合。在此类情况下,闭锁系统21890将停止、妨碍或减慢钉击发系统的远侧行进,直到击发构件21960的加速度下降到阈值以下并且弹簧21985可以将锁定臂21982拉出与齿21981的齿条的接合。Turning now to FIG. 85, the suturing assembly includes a
除了上述之外或代替上述内容,缝合组件可以包括用于调节钉击发系统的速度的装置,其在各种情况下可以减少或平滑钉击发系统内产生的加速度峰值。现在转向图86,缝合组件可以包括轴22030和钉击发构件22060,该钉击发构件22060被构造成在轴22030内平移。缝合组件还包括阻尼系统22080,该阻尼系统22080包括阻尼构件或缓冲器22081,阻尼构件或缓冲器被构造成减慢钉击发构件22060的远侧平移和/或近侧平移。例如,阻尼构件22081由顺应性和/或弹性材料构成,诸如橡胶,当击发构件22060接触阻尼构件时,顺应性和/或弹性材料被构造成产生与施加到击发构件22060的推力相反的阻尼力。击发构件22060延伸通过限定在阻尼构件22081中的孔隙,并且包括被构造成接合阻尼构件22081的环形脊22082。例如,尽管在图86中仅示出了一个阻尼构件22081和轴脊22082,但是缝合组件可以包括任何合适数量的阻尼构件22081和/或轴脊22082。In addition to or in lieu of the foregoing, the stapling assembly may include means for adjusting the speed of the staple firing system, which in various circumstances may reduce or smoothen acceleration peaks generated within the staple firing system. Turning now to FIG. 86, the stapling assembly can include a
除上述之外,缓冲器22081定位在轴22030内,使得脊22082恰好在击发构件22060到达缺失的仓和/或用完的仓闭锁件之前接触缓冲器22081。在此类情况下,阻尼系统22080可以在击发构件22060到达闭锁件之前降低击发构件22060的速度,并且因此减小击发构件22060撞击通过或无意地使闭锁件失效的可能性。In addition to the above, the
现在转到图87,缝合组件可以包括轴22130和钉击发构件22160,该钉击发构件22160被构造成在轴22130内平移。缝合组件还包括液压阻尼系统22180,该液压阻尼系统22180包括汽缸组件,该汽缸组件被构造成在其钉击发冲程期间使击发构件22160减慢。汽缸组件包括可滑动地定位在腔室22183中的输入活塞22181,该活塞22181与腔室22183的侧壁密封地接合。汽缸组件还包括可滑动地定位在腔室22185中的输出活塞22184,该输出活塞22184与腔室22185的侧壁密封地接合。如图87所示,腔室22183的一部分经由限制孔口22189与腔室22185的一部分流体连通。不可压缩或基本上不可压缩的流体22182容纳在输入活塞22181和输出活塞22184之间的腔室22183和22185中。在至少一种情况下,流体22182包括例如液压流体。在某些情况下,流体22182包括例如盐水。当击发构件22160向远侧推进时,击发构件22160或限定在击发构件22160上的肩部接触限定在输入活塞22181上的凸轮或成角度的表面,并将输入活塞向下驱动到腔室22183中。在此类情况下,输入活塞22181将流体22182位移到腔室22185中,腔室22185继而又使输出活塞22184在腔室22185内位移。输出活塞22184、流体22182和输入活塞22181的运动由位于腔室22185中的弹簧22186抵抗。因此,阻尼系统22180将曳力施加到击发构件22160,该曳力随着击发构件22160的速度的增加而成比例地增加,并且可以限制击发构件22160的最大速度。类似于上文,阻尼系统22180可以定位在轴22130中,使得击发构件22160恰好在击发构件22160到达闭锁件之前或至少在击发构件22160到达闭锁件之前接触阻尼系统22180。Turning now to FIG. 87 , the stapling assembly can include a
现在转到图89,缝合组件可以包括轴22330和可在轴22330内滑动的击发构件22360。缝合组件还包括气动活塞布置22380,该气动活塞布置22380被构造成将曳力施加到击发构件22360。击发构件22360包括延伸通过限定在轴22330中的支撑件的圆柱形或至少基本上圆柱形的杆,以及可滑动地定位在限定在轴22330中的汽缸22383中的整体形成的活塞22362。活塞布置22380包括一个或多个活塞密封件22382,该活塞密封件22382坐置在围绕活塞22362延伸的密封凹槽内。活塞密封件22382与活塞22362和汽缸22383的汽缸壁22381密封地接合。活塞布置22380还包括一个或多个密封件22361,其坐置在限定在轴支撑件中的密封凹槽中,该密封凹槽与轴22330和击发构件22360密封地接合。在各种情况下,密封件22361和22383包括例如顺应性O形环。在任何情况下,击发构件22360的远侧位移压缩汽缸22383中的空气并强迫压缩空气通过限定在轴22330中的排气口22363。该布置将曳力施加到击发构件22360,该曳力与击发构件22360的速度成比例地增加。Turning now to FIG. 89 , the suturing assembly can include a
除上述之外,可选择排气口22363的直径和/或长度以便以期望的方式限制击发构件22360的速度。此外,当击发构件22360向远侧推进并向近侧缩回时,密封件22382与轴22330密封地接合,因此,当击发构件22360向远侧推进并向近侧缩回时,活塞布置22380将曳力施加到击发构件22360。在至少一个实施方案中,阀,诸如单向阀,例如可以相对于排气口22363定位和布置。当击发构件22360向远侧推进时,该阀可以提供具有较小直径的孔,并且当击发构件22360向近侧缩回时,该孔可以提供具有较大直径的孔。在此类情况下,与当击发构件22360向近侧缩回给定速度时相比,当击发构件22360向远侧推进时,排气口可以将更大的曳力施加到击发构件22360。因此,阀可以提供不同的方向速度限制。In addition to the above, the diameter and/or length of the vent 22363 may be selected to limit the velocity of the firing
现在转向图88,缝合组件可以包括钉击发轴22060,其向远侧位移以从钉仓射出钉。缝合组件还包括用于将电磁曳力和/或磁性曳力施加到钉击发轴22260的装置。在至少一种情况下,缝合组件包括卷绕的导体线圈22280,其例如由电源诸如电池供电,使得电流流过线圈22280。卷绕的导体线圈22280一旦被供电就产生磁场,该磁场与限定在轴22260中和/或附接到轴22260的磁性元件22282相互作用。在至少一种情况下,磁性元件22282包括例如永磁体。电源的极性被施加到线圈22280,使得线圈22280产生磁场,当击发构件22260接近线圈22280时,该磁场将排斥力施加到铁磁元件22282,并且因此在钉击发冲程期间将曳力施加到击发构件22360。由线圈22280产生的磁场的强度(intensity)或强度(strength)在线圈22280附近更强,并且因此,施加到击发构件22360的曳力将在线圈22280附近更大。Turning now to Figure 88, the stapling assembly can include a
根据上述情况,线圈22280在被供电时可以用作制动器,并且在某些情况下,例如在钉击发冲程结束时停止或至少有助于停止击发构件22360的纵向移动。在某些情况下,施加到线圈22280的电压极性可以反转,以在击发构件22360的缩回冲程期间反转通过线圈22280的电流。在此类情况下,当击发构件22360远离线圈22280缩回时,线圈22280可以将制动力施加到击发构件22360。尽管在图88中仅示出了一个线圈22280,但是缝合组件可以包括任何合适数量的可通电线圈。除了上述之外或代替上述内容,缝合组件可以包括安装到缝合组件的轴的一个或多个永磁体,其可以将磁性制动力施加到钉击发构件。In light of the above, the
在至少一个实施方案中,再次参考图88,电源未施加到线圈22280,并且线圈22280可以用作电/感应制动器。在此类实施方案中,磁性元件22282通过线圈22280的移动在线圈22280中产生电流,该电流继而产生与磁性元件22282的移动相反的磁场。当磁性元件22282相对于线圈22280缓慢移动时,相反的磁场在击发构件22260上运用可忽略的制动力。当磁性元件22282相对于线圈22280快速移动时,相反的磁场强得多并且将更强的制动力施加到击发构件22260。线圈22280和磁性元件22282可以定位和布置成使得制动力恰好在击发构件22260到达缺失的仓和/或用完的仓闭锁件之前或至少在此之前施加到击发构件22260。In at least one embodiment, referring again to FIG. 88, power is not applied to
如上所述,钉击发系统的击发构件可以由电动马达驱动。可包括处理器并且可以实现为微控制器的马达控制器可以用于控制施加到电动马达的电压,并且因此控制钉击发构件的速度。在某些情况下,马达控制器可以利用脉冲宽度调制(PWM)和/或频率调制(FM),例如,来控制电动马达的速度。在其它情况下,马达控制器可不调制供应到电动马达的电力。在任一种情况下,缝合组件可以包括与马达控制器通信的传感器系统,该传感器系统被构造成检测未用完的钉仓或未用完的钉仓夹具是否已附接到缝合组件。在传感器系统检测到未用完的钉仓附接到缝合组件的情况下,马达控制器可以识别来自传感器系统的信号(该信号指示未用完的钉仓的存在),并且当缝合组件的使用者致动钉击发系统时操作钉击发系统的电动马达。在传感器系统没有检测到附接到缝合组件的未用完的钉仓的情况下,马达控制器接收来自传感器系统的信号(该信号指示未用完的仓未附接到缝合组件),并且防止电动马达操作钉击发系统。此种布置可以包括电子或软件闭锁件。As mentioned above, the firing member of the staple firing system may be driven by an electric motor. A motor controller, which may include a processor and may be implemented as a microcontroller, may be used to control the voltage applied to the electric motor, and thus the speed of the staple firing member. In some cases, the motor controller may utilize pulse width modulation (PWM) and/or frequency modulation (FM), for example, to control the speed of the electric motor. In other cases, the motor controller may not modulate the power supplied to the electric motor. In either case, the stapling assembly can include a sensor system in communication with the motor controller, the sensor system being configured to detect whether an unspent staple cartridge or an unspent staple cartridge clip has been attached to the stapling assembly. In the event that the sensor system detects that an unused staple cartridge is attached to the stapling assembly, the motor controller can identify a signal from the sensor system indicating the presence of the unused staple cartridge, and when the stapling assembly is used An electric motor that operates the nail firing system when the user actuates the nail firing system. In the event that the sensor system does not detect an unused staple cartridge attached to the stapling assembly, the motor controller receives a signal from the sensor system indicating that the unused cartridge is not attached to the stapling assembly, and prevents The electric motor operates the nail firing system. Such arrangements may include electronic or software latches.
除了上述之外或代替上述内容,缝合系统可以包括传感器系统,该传感器系统被构造成跟踪钉击发构件的位移。参考图90,缝合组件22400的钉击发构件22460能够沿钉击发路径22463在近侧未击发位置和远侧击发位置之间移动。例如,可检测的磁性元件22461安装到钉击发构件22460,其沿钉击发路径22463移动或至少基本上沿钉击发路径22463移动。在至少一种情况下,磁性元件22461是永磁体,例如,其由铁、镍和/或任何其它合适的材料构成。传感器系统包括第一或近侧传感器22401’和第二或远侧传感器22401,该第一或近侧传感器22401’和第二或远侧传感器22401被构造成在磁性元件22461与可平移构件22460一起沿钉击发路径22463移动时检测磁性元件22461。第一传感器22401’和第二传感器22401各自包括霍尔效应传感器;然而,传感器22401’和22401可以包括任何合适的传感器。传感器22401’和22401输出根据它们与磁性元件22461的相应距离而变化的电压(当距离小时输出较高电压,当距离较大时输出较小电压)。In addition to or in lieu of the foregoing, the stapling system may include a sensor system configured to track displacement of the staple firing member. 90, the
除上述之外,传感器系统包括传感器电路,该传感器电路尤其包括例如与传感器22401’和22401通信的电压源22403,该电压源22403向传感器22401’和22401供电。传感器电路还包括与第一传感器22401’通信的第一开关22405’和与第二传感器22401通信的第二开关22405。在至少一种情况下,例如,开关22401’和22401各自包括晶体管,诸如FET。传感器22401’、22401的输出分别连接到开关22405’、22405的中央(栅极)终端。在钉击发构件22460的击发冲程之前,来自传感器22401’、22401的输出电压高,使得第一开关22405’和第二开关22405处于闭合状态。In addition to the above, the sensor system includes a sensor circuit including, for example, a
当磁性元件22461经过第一传感器22401’时,第一传感器22401’的电压输出足以在闭合状态和打开状态之间改变第一开关。类似地,当磁性元件22461经过第二传感器22401时,第二传感器22401的电压输出足以在闭合状态和打开状态之间改变第二开关22405。当开关22405’和22405都处于打开状态时,接地电位被施加到运算放大器电路22406。运算放大器电路22406与马达控制器的微控制器22490的输入通道进行信号通信,并且当接地电位施加到运算放大器电路22406时,微控制器22490从电路22406接收接地信号。When the
当微控制器22490从电路22406接收接地信号时,微控制器22490可以确定钉击发冲程已经完成并且定位在缝合组件22400中的钉仓已经完全用完。设想了其它实施方案,其中传感器系统被构造成检测钉击发构件22460的部分击发冲程并向微控制器22490供应指示钉仓已经至少部分用完的信号。在任一种情况下,马达控制器可以构造成防止击发构件22460执行另一击发冲程,直到已经用未用完的钉仓替换钉仓。在至少一种情况下,除上述之外,传感器系统包括传感器,该传感器被构造成检测用完的仓是否已经从缝合组件拆卸和/或未用完的仓是否已经组装到缝合组件。When the
除上述之外,传感器系统可以被构造成检测击发构件22460是否已经沿缩回路径22462缩回。在至少一种情况下,当磁性元件22461沿路径22462缩回并且将第二开关22405改变回闭合状态时,传感器22401可以检测磁性元件22461。类似地,当磁性元件22461沿路径22463缩回并且将第一开关22405’改变回闭合状态时,传感器22401’可以检测磁性元件22461。通过闭合开关22405和22405’,来自电池22403的电压极性被施加到电路22406并且因此,微处理器22490在其输入通道上从电路22406接收Vcc信号。在各种情况下,马达控制器可以构造成防止电动马达被操作执行另一个钉击发冲程,直到击发构件22460已经完全缩回。In addition to the above, the sensor system may be configured to detect whether the firing
在图71至图74中示出了包括钉仓25730、击发构件25760和闭锁件25780的缝合组件25700。钉仓25730包括滑动件25770,该滑动件25770在击发构件25760的钉击发冲程期间被击发构件25760向远侧推动。在钉击发冲程期间,击发构件25760将滑动件25770从近侧未击发位置(图71和图72)向远侧推向远侧击发位置(图73和图74)。滑动件25770被构造成在可移除地存储在钉腔体(其限定在钉仓25730中)中的钉下方滑动,并从钉腔体射出钉。在各种情况下,钉仓25730包括钉驱动器,钉驱动器其一支撑钉仓中的钉,并且其二由滑动件25770驱动以从钉腔体射出钉。在击发构件25760的钉击发冲程完成之后,击发构件25760向近侧缩回。值得注意的是,滑动件25770不会与击发构件25760一起向近侧缩回。A stapling
除上述之外,闭锁件25780包括锁定臂25782。每个锁定臂25782包括悬臂梁,该悬臂梁包括安装到缝合组件25700的轴的第一端部和被构造成接合击发构件25760的可移动的第二端部。击发构件25760包括限定在击发构件中的锁定孔隙25762,该锁定孔隙25762被构造成接收锁定臂25782的第二端部。然而,当滑动件25770处于其近侧未击发位置时(图71和图72),滑动件25770使锁定臂25782侧向偏离击发构件25760并将锁定臂25782保持脱出锁定孔隙25762。因此,当钉仓25730定位在缝合组件25700中并且钉仓25730的滑动件25770处于其未击发位置时,闭锁件25780不防止击发构件25760执行钉击发冲程。当击发构件25760在其钉击发冲程期间向远侧推进时,限定在击发构件25760中的锁定孔隙25762不再与锁定臂25782对准,因此,一旦开始则锁定臂25782不会中断钉击发冲程。在击发构件25760的钉击发冲程之后,击发构件25760向近侧缩回到其未击发位置,如图73和图74所示。此时,锁定孔隙25762与锁定臂25782重新对准,并且当滑动件25770未返回其未击发位置时,锁定臂25782可以进入到锁定孔隙25762中并闭锁击发构件25760。In addition to the above, the
因此,闭锁件25780包括缺失的仓闭锁件和用完的仓闭锁件。设想了另选的实施方案,其中钉仓25730不能够从缝合组件25700移除。在此类实施方案中,闭锁件25780将包括用完的仓闭锁件。Thus, the
参考图75和图76,缝合组件25800包括钉仓25830,该钉仓25830包括仓主体25831、能够在仓主体25831内向远侧移动的滑动件25870,以及钉驱动器25880。仓主体包括限定在仓主体中的钉腔体25832和可移除地存储在钉腔体25832中的钉。在钉击发冲程期间,滑动件25870可在近侧未击发位置(图75)和远侧击发位置之间向远侧平移。在钉击发冲程期间,滑动件25870接触钉驱动器25880并在钉腔体25832内向上驱动钉驱动器25880,如图76所示。值得注意的是,仓主体25831包括限定在仓主体中的若干纵向排钉腔体25832,并且钉驱动器25880布置成纵向排,其与纵向排钉腔体25832对准。在滑动件25870的钉击发冲程期间,当滑动件25870向远侧推进时,钉驱动器25880和钉被按顺序驱动。换言之,在最远侧驱动器25880和钉被击发之前,最近侧钉驱动器25880和钉被击发。在各种情况下,最近侧钉驱动器25880的击发标志着钉击发冲程的开始。75 and 76, the stapling
再次参考图75和图76,钉仓25830包括闭锁电路,该闭锁电路被构造成检测钉仓25830何时至少部分地被击发。闭锁电路的一部分延伸通过仓主体25831并包括电接触件25834。闭锁电路的另一部分延伸通过最近侧钉驱动器25880并包括与电接触件25834对准的电接触件25884。当钉仓25830处于其未击发状态时(图75),驱动器接触件25884邻接仓主体接触件25834,并且因此,闭锁电路处于闭合状态。当最近侧钉驱动器25880被滑动件25870向上提升时,驱动器接触件25884与仓主体接触件25834脱离并且闭锁电路打开。闭锁电路与缝合组件25800的控制器进行信号通信,该控制器被构造成解释闭锁电路的打开意味着缝合组件25800中的钉仓25830已经至少部分地被击发并且在没有用未用完的钉仓25830替换钉仓25830的情况下,不应该操作钉击发系统第二或额外的时间。一旦未用完的钉仓25830已经定位在缝合组件25800中并且闭锁电路被未用完的钉仓25830别和,则控制器可以准许钉击发系统再次操作。Referring again to Figures 75 and 76, the
在各种情况下,再次参考图76,最近侧钉驱动器25880与钉腔体25832的侧壁略微摩擦配合接合。因此,最近侧钉驱动器25880在被滑动件25870向上提升之后保持在其击发位置,并且因此,一旦闭锁电路打开并且闭锁电路重新闭合的可能性降低,则驱动器接触件25884保持脱出与仓主体接触件25834接触。In each case, referring again to FIG. 76 , the proximal
如上所述,钉仓25830的钉击发冲程打开闭锁电路。在另选实施方案中,钉仓的钉击发冲程可以闭合闭锁电路。在此类实施方案中,缝合组件的控制器可以解释闭锁电路的闭合意味着钉仓已经至少部分地被击发,并且在没有用未用完的钉仓替换钉仓的情况下,不应该操作钉击发系统第二或额外的时间。As described above, the staple firing stroke of the
除了上述之外或代替上述内容,缝合组件可以包括检测电路,该检测电路被构造成检测何时最远侧钉驱动器25880和钉已经被击发。在至少一个此种情况下,最远侧钉驱动器25880可以具有上述接触布置,和/或任何其它合适的布置,其改变检测电路的状态。比如,缝合组件的控制器可以解释检测电路的状态变化意味着钉仓已经完全击发并且钉击发系统应该缩回。In addition to or in lieu of the above, the stapling assembly may include detection circuitry configured to detect when the distal-most
现在转到图77和图78,缝合组件25900包括轴25910、砧座夹具25920和钉仓夹具,该钉仓夹具可移除地附接到轴25910的框架。缝合组件25900还包括关节运动接头25940,该关节运动接头25940被构造成准许砧座夹具25920和钉仓夹具相对于轴25910进行关节运动。类似于本文所述的实施方案,钉仓夹具能够在打开位置和闭合位置之间运动,以将患者的组织抵靠砧座夹具25920夹紧。Turning now to FIGS. 77 and 78 , the stapling
缝合组件25900还包括闭锁电路25980,该闭锁电路25980被构造成检测钉仓夹具何时处于其闭合位置。闭锁电路25980包括延伸通过轴25910的导体25984和位于砧座夹具25920中的电极垫25982。导体25984将电极垫25982放置成与钉组件25900的控制器通信,并且在各种情况下,控制器可以在导体25984上施加电压电位以在闭锁电路25980内产生监控电流。如下面更详细描述的,控制器被构造成评估闭锁电路25980的阻抗和/或电阻率,并且经由监测电流来监测闭锁电路25980的阻抗和/或电阻率的变化。The stapling
除上述之外,主要参考图78,钉仓夹具包括销25932,该销25932被构造成在钉仓夹具移动到其闭合位置时刺穿和/或变形电极垫25982。销25932例如由不锈钢构成,并且破坏由控制器检测到的闭锁电路25980的阻抗和/或电阻率。此种破坏可以通知控制器其一,钉仓已经附接到缝合组件25900,并且其二,钉仓夹具已经闭合。此时,控制器可以电子地解锁钉击发系统并准许钉击发系统执行其钉击发冲程。在至少一个此种情况下,钉击发系统包括电动马达和电池,其中控制器包括电子或软件闭锁件,其防止电池向电动马达提供足够的电力执行钉击发冲程,直到控制器检测到闭锁电路25980的参数已经发生了充分变化。因此,钉仓组件25900的钉击发系统不能操作,直到钉仓夹具已经闭合。78, the staple cartridge clamp includes a
再次参考图77,闭锁电路25980延伸通过轴25910和砧座夹具25920,但不延伸通过钉仓夹具。虽然钉仓夹具的销25932破坏闭锁电路25980,如上所述,但销25932在钉仓夹具内电绝缘并且不闭合或打开闭锁电路25980。Referring again to Figure 77, the
另选地,再次参考图77和图78,销25932是闭锁电路25980的零件,电极垫25982包括由销25932刺穿的接触件。在此类实施方案中,当销25932接合电极垫25982时,销25932闭合闭锁电路,使得感测电流可以在销25932和电极垫25982之间流动。在至少一种情况下,电极垫25982可以例如由自修复材料,诸如导电凝胶构成。在各种情况下,销25932可在进入到电极垫25982中之前刺穿组织。再次参考图77,电极垫25982可以包括擦拭垫25983,该擦拭垫25983被构造成在销25932进入电极垫25982之前至少部分地清洁销25932。Alternatively, referring again to FIGS. 77 and 78 , the
参考图79和图80,轴25910包括外壳体25911,该外壳体25911包括限定在外壳体中的纵向狭槽25912,该纵向狭槽25912被构造成可滑动地接收击发构件25960。纵向狭槽25912延伸通过关节运动接头25940并进入砧座夹具25920和钉仓夹具。当砧座夹具25920和钉仓夹具处于非关节运动取向时,纵向狭槽25912是直的,或不包括方向变化。当砧座夹具25920和钉仓夹具处于关节运动取向时,纵向狭槽25912包括方向变化。因此,击发构件25960需要足够柔性以穿过关节运动接头25940。然而,击发构件25960的此种柔性可促使击发构件25960在钉击发冲程期间屈曲。为了防止或减少此种屈曲,缝合组件25900还包括定位在击发构件25960的相对侧上的防屈曲或防爆板25944,其被构造成在关节运动接头25940内和/或邻近关节运动接头25940支撑击发构件25960。在至少一种情况下,防屈曲板25944相对于关节运动接头25940定位在轴25910中的近侧。79 and 80, the
除上述之外,轴25910和关节运动接头25940包括限定在其中的布线通道,该布线通道被构造成接收闭锁电路25980的导体25984。比如,轴25910包括限定在轴25910的外壳体25911中的通道25915。在至少一个此种情况下,第一导体25984延伸通过第一通道25915,并且第二导体25984延伸通过第二通道25915。此外,每个防屈曲板25984包括限定在防屈曲板中的通道25945,该通道25945被构造成接收导体25984。通道25945与通道25915对准或至少基本上对准。In addition to the above,
参考图81,钉仓26230包括纵向狭槽26231和限定在钉仓中的纵向排钉腔体26232。在钉击发冲程期间,例如击发构件,诸如击发构件25960,被构造成在纵向狭槽26231内滑动以向远侧推动例如滑动件,诸如滑动件25770,以将钉从钉腔体26232射出。与上述类似,击发构件25960和滑动件25770从钉腔体26232按顺序射出钉,并且因此例如抵靠砧座,诸如砧座25920使钉按顺序顺序变形。通过击发构件25960传递以按顺序使钉变形的推力很少(如果有的话)是恒定的。相反,推力通常包括一系列峰值,这些峰值与抵靠砧座变形的钉重合。图81A示出了此类力峰值。更具体地,图81A示出了击发构件25960在钉击发冲程的长度(L)上经历的推力(F)的典型力曲线26260。力曲线26260包括峰26261和峰26261之间的谷26262。81, the
在各种情况下,除上述之外,缝合组件的控制器可以构造成监测施加到击发构件25960的推力。在至少一种情况下,钉击发系统包括构造成驱动击发构件25960的电动马达,并且在此类情况下,可以监测在钉击发冲程期间由电动马达汲取的电流,作为施加到击发构件25960的推力的指标。事实上,比较由电动马达经钉击发冲程汲取的电流的图表可能看起来非常类似于图81A中所示的力曲线26260。在某些实施方案中,力传感器可用于监测推力。在任何情况下,控制器可以在击发冲程期间对力曲线26260的峰值26261进行计数,并且在已经达到预先确定的计数阈值之后停止钉击发冲程。在至少一个此种情况下,钉仓可以包括可移除地存储在钉仓中的100个钉,并且在控制器已经计数100个力和/或电流峰值之后,例如,当可以假设钉击发冲程已经完成时,控制器可以中断对电动马达的供电。In various cases, in addition to the above, the controller of the suturing assembly may be configured to monitor the thrust force applied to the firing
在各种情况下,除上述之外,缝合组件可以被构造成与钉仓一起使用,该钉仓具有不同长度和/或存储在钉仓中的不同数量的钉。例如,缝合组件可与第一钉仓和第二钉仓一起使用,该第一钉仓被构造成施加大约45mm的钉线,该第二钉仓被构造成施加大约60mm的钉线。第一钉仓包括可移除地存储在第一钉仓中的第一数量的钉,并且第二钉仓包括可移除地存储在第二钉仓中的第二数量的钉,该第二数量大于第一数量。当第一钉仓与缝合组件一起使用时,控制器被构造成在控制器识别出第一数量的力峰值之后停止钉击发冲程,并且类似地,当第二钉仓与缝合组件一起使用时,控制器被构造成在控制器识别出第二数量的力峰值之后停止钉击发冲程。换句话说,控制器可以构造成评估第一仓的力曲线,例如诸如力曲线26260,以及第二仓的力曲线,例如诸如力曲线26260’。此外,控制器可以被构造成监测任何合适数量的钉仓的力曲线。In various cases, in addition to the above, the stapling assembly may be configured for use with staple cartridges having different lengths and/or different numbers of staples stored in the staple cartridge. For example, a stapling assembly can be used with a first staple cartridge configured to apply approximately 45 mm of staple line and a second staple cartridge configured to apply approximately 60 mm of staple line. The first staple cartridge includes a first quantity of staples removably stored in the first staple cartridge, and the second staple cartridge includes a second quantity of staples removably stored in the second staple cartridge, the second staple cartridge The quantity is greater than the first quantity. When the first staple cartridge is used with the stapling assembly, the controller is configured to stop the staple firing stroke after the controller identifies the first number of force peaks, and similarly, when the second staple cartridge is used with the stapling assembly, The controller is configured to stop the nail firing stroke after the controller identifies the second number of force peaks. In other words, the controller may be configured to evaluate the force profile of the first bin, such as
除上述之外,可以与缝合组件一起使用的钉仓可以包括唯一的标识符,其可以辅助缝合组件的控制器识别附接到缝合组件的钉仓的类型。在至少一种情况下,钉仓具有唯一的RFID标签,其例如可以与缝合组件的控制器通信。在某些情况下,钉仓上具有条形码,这些条形码例如在与缝合组件一起使用之前可以被扫描。一旦控制器识别附接到缝合组件的钉仓的类型,控制器就可以确定钉击发冲程的适当长度。在至少一种情况下,关于钉仓的适当击发冲程长度的信息可以存储在例如与控制器的微处理器通信的存储设备中。In addition to the above, a staple cartridge that can be used with a stapling assembly can include a unique identifier that can assist a controller of the stapling assembly to identify the type of staple cartridge attached to the stapling assembly. In at least one instance, the staple cartridge has a unique RFID tag that can communicate with, for example, a controller of the stapling assembly. In some cases, the staple cartridge has barcodes on it that can be scanned, for example, prior to use with the stapling assembly. Once the controller identifies the type of staple cartridge attached to the stapling assembly, the controller can determine the appropriate length of the staple firing stroke. In at least one instance, information regarding the appropriate firing stroke length of the staple cartridge may be stored, for example, in a memory device in communication with a microprocessor of the controller.
除了上述之外或代替上述内容,钉仓,例如诸如钉仓26230可以被构造成在推力中产生可检测的力峰值和/或在钉击发冲程结束时产生电动马达汲取的电流峰值。参考图81,钉仓26230包括一个或多个牙桥26233,该牙桥26233在纵向狭槽26231的远侧端部附近,即在钉击发冲程的远侧端部附近横跨纵向狭槽26231延伸。当击发构件26260向远侧推进时,击发构件26260接触牙桥26233并且断开和/或切入桥26233,这在推力和/或供应电流中产生峰值,该峰值与钉变形时产生的峰值不同。在至少一种情况下,通过使牙桥26233失效而产生的峰值比通过使钉变形而产生的峰值大得多,并且控制器被构造成辨别此类峰值中的差异。一旦控制器识别出牙桥已经产生某些峰值,控制器就可以停止钉击发冲程。如读者应该理解的,此类布置将允许控制器在适当的时刻停止钉击发系统,而不管例如附接到缝合组件的钉仓的长度和/或存储在钉仓中的钉的数量如何。In addition to or in lieu of the above, a staple cartridge, such as
本文描述的外科器械系统中的许多由电动马达促动;然而,本文所述的外科器械系统可以以任何合适的方式促动。在各种情况下,例如,本文所述的外科器械系统可由手动操作的触发器促动。在某些情况下,本文公开的电动马达可包括机器人控制系统的一部分或多个部分。此外,本文公开的任何端部执行器和/或工具组件可与机器人外科器械系统一起使用。例如,名称为“具有可转动的钉仓部署布置的外科缝合器械(SURGICAL STAPLINGINSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS)”的美国专利申请序列号13/118,241,现为美国专利号9,072,535,更详细地公开了机器人外科器械系统的几个示例。名称为“具有可旋转钉部署布置的外科缝合器械(SURGICAL STAPLING INSTRUMENTSWITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS)”的美国专利申请序列号13/118,241,现为美国专利号9,072,535的全部公开内容以引入方式并入本文。Many of the surgical instrument systems described herein are actuated by electric motors; however, the surgical instrument systems described herein may be actuated in any suitable manner. In various instances, for example, the surgical instrument systems described herein may be actuated by manually operated triggers. In some cases, the electric motors disclosed herein may include part or parts of a robotic control system. Furthermore, any end effector and/or tool assembly disclosed herein may be used with a robotic surgical instrument system. For example, US Patent Application Serial No. 13/118,241, now US Patent No. 9,072,535, entitled "SURGICAL STAPLING INSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS," discloses robotics in more detail Several examples of surgical instrument systems. The entire disclosure of US Patent Application Serial No. 13/118,241, now US Patent No. 9,072,535, entitled "SURGICAL STAPLING INSTRUMENTSWITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS," is incorporated herein by reference.
已结合钉的部署和变形描述了本文所述的外科器械系统;然而,本文所述的实施方案不限于此。例如,可以设想部署除钉之外的紧固件诸如夹具或大头钉的各种实施方案。此外,还可设想利用用于密封组织的任何合适装置的各种实施方案。例如,根据各种实施方案的端部执行器可包括被构造成能够加热和密封组织的电极。另外,例如,根据某些实施方案的端部执行器可施加振动能量来密封组织。The surgical instrument systems described herein have been described in conjunction with deployment and deformation of the staples; however, the embodiments described herein are not so limited. For example, various embodiments are contemplated that deploy fasteners other than staples, such as clips or tacks. In addition, various embodiments are also contemplated that utilize any suitable device for sealing tissue. For example, end effectors according to various embodiments may include electrodes configured to heat and seal tissue. Additionally, for example, end effectors according to certain embodiments may apply vibrational energy to seal tissue.
下述专利的全部公开内容据此以引用方式并入本文:The entire disclosures of the following patents are hereby incorporated by reference:
提交于1997年3月12日的名称为“LINEAR STAPLER WITH IMPROVED FIRINGSTROKE”的欧洲专利申请号12/795298;European Patent Application No. 12/795298, entitled "LINEAR STAPLER WITH IMPROVED FIRINGSTROKE", filed on March 12, 1997;
公布于1997年2月25日的名称为“TRIGGER MECHANISM FOR SURGICALINSTRUMENTS”的美国专利5,605,272;U.S. Patent 5,605,272, entitled "TRIGGER MECHANISM FOR SURGICALINSTRUMENTS," issued February 25, 1997;
公布于1997年12月16日的名称为“LINEAR STAPLER WITH IMPROVED FIRINGSTROKE”的美国专利5,697,543;U.S. Patent 5,697,543, entitled "LINEAR STAPLER WITH IMPROVED FIRINGSTROKE," issued December 16, 1997;
2005年11月10日提交的名称为“ARTICULATABLE SURGICAL INSTRUMENTCOMPRISING A FIRING DRIVE”的美国专利申请公布2005/0246881;US Patent Application Publication 2005/0246881, entitled "ARTICULATABLE SURGICAL INSTRUMENTCOMPRISING A FIRING DRIVE", filed on November 10, 2005;
公布于2007年9月6日的名称为“METHOD FOR STAPLING TISSUE”的美国专利申请公布2007/0208359;US Patent Application Publication 2007/0208359 entitled "METHOD FOR STAPLING TISSUE" published on September 6, 2007;
公布于1985年7月9日的名称为“DISPOSABLE LINEAR SURGICAL STAPLINGINSTRUMENT”的美国专利4,527,724;U.S. Patent 4,527,724, entitled "DISPOSABLE LINEAR SURGICAL STAPLINGINSTRUMENT," issued July 9, 1985;
公布于1992年8月11日的名称为“FAST CLOSURE DEVICE FOR LINEAR SURGICALSTAPLING INSTRUMENT”的美国专利5,137,198;U.S. Patent 5,137,198 entitled "FAST CLOSURE DEVICE FOR LINEAR SURGICAL STAPLING INSTRUMENT" issued August 11, 1992;
1995年4月11日公布的名称为“柔性支撑轴组件(FLEXIBLE SUPPORT SHAFTASSEMBLY)”的美国专利号5,405,073;U.S. Patent No. 5,405,073, "FLEXIBLE SUPPORT SHAFTASSEMBLY," issued April 11, 1995;
2013年1月29日公布的名称为“具有自调节砧座的外科切割和缝合器械(SURGICALCUTTING AND STAPLING INSTRUMENT WITH SELF ADJUSTING ANVIL)”的美国专利号8,360,297;US Patent No. 8,360,297, entitled "SURGICAL CUTTING AND STAPLING INSTRUMENT WITH SELF ADJUSTING ANVIL," issued January 29, 2013;
2015年7月30日提交的名称为“包括用于确保外科器械的正确顺序操作的系统的外科器械(SURGICAL INSTRUMENT COMPRISING SYSTEMS FOR ASSURING THE PROPERSEQUENTIAL OPERATION OF THE SURGICAL INSTRUMENT)”的美国专利申请序列号14/813,242;U.S. Patent Application Serial No. 14/ 813,242;
2015年7月30日提交的名称为“包括分离组织固定和组织切割系统的外科器械(SURGICAL INSTRUMENT COMPRISING SEPARATE TISSUE SECURING AND TISSUE CUTTINGSYSTEMS)”的美国专利申请序列号14/813,259;U.S. Patent Application Serial No. 14/813,259, entitled "SURGICAL INSTRUMENT COMPRISING SEPARATE TISSUE SECURING AND TISSUE CUTTING SYSTEMS," filed July 30, 2015;
2015年7月30日提交的名称为“包括用于准许组织的任选转换的系统的外科器械(SURGICAL INSTRUMENT COMPRISING SYSTEMS FOR PERMITTING THE OPTIONALTRANSECTION OF TISSUE)”的美国专利申请序列号14/813,266;US Patent Application Serial No. 14/813,266, entitled "SURGICAL INSTRUMENT COMPRISING SYSTEMS FOR PERMITTING THE OPTIONALTRANSECTION OF TISSUE," filed July 30, 2015;
名称为“包括用于绕过外科器械操作步骤的系统的外科器械(SURGICALINSTRUMENT COMPRISING A SYSTEM FOR BYPASSING AN OPERATIONAL STEP OF THESURGICAL INSTRUMENT)”的美国专利申请序列号14/813,274;其提交于2015年7月30日;US Patent Application Serial No. 14/813,274 entitled "SURGICAL INSTRUMENT COMPRISING A SYSTEM FOR BYPASSING AN OPERATIONAL STEP OF THESURGICAL INSTRUMENT"; filed July 30, 2015 day;
公布于1995年4月4日的名称为“ELECTROSURGICAL HEMOSTATIC DEVICE”的美国专利5,403,312;U.S. Patent 5,403,312, entitled "ELECTROSURGICAL HEMOSTATIC DEVICE," issued April 4, 1995;
公布于2006年2月21日的名称为“SURGICAL STAPLING INSTRUMENT HAVINGSEPARATE DISTINCT CLOSING AND FIRING SYSTEMS”的美国专利7,000,818;U.S. Patent 7,000,818 entitled "SURGICAL STAPLING INSTRUMENT HAVINGSEPARATE DISTINCT CLOSING AND FIRING SYSTEMS" issued on February 21, 2006;
公布于2008年9月9日的名称为“MOTOR-DRIVEN SURGICAL CUTTING ANDFASTENING INSTRUMENT WITH TACTILE POSITION FEEDBACK”的美国专利7,422,139;U.S. Patent 7,422,139, entitled "MOTOR-DRIVEN SURGICAL CUTTING ANDFASTENING INSTRUMENT WITH TACTILE POSITION FEEDBACK," issued September 9, 2008;
公布于2008年12月16日的名称为“ELECTRO-MECHANICAL SURGICAL INSTRUMENTWITH CLOSURE SYSTEM AND ANVIL ALIGNMENT COMPONENTS”的美国专利7,464,849;U.S. Patent 7,464,849 entitled "ELECTRO-MECHANICAL SURGICAL INSTRUMENTWITH CLOSURE SYSTEM AND ANVIL ALIGNMENT COMPONENTS" issued December 16, 2008;
公布于2010年3月2日的名称为“SURGICAL INSTRUMENT HAVING AN ARTICULATINGEND EFFECTOR”的美国专利7,670,334;U.S. Patent 7,670,334, entitled "SURGICAL INSTRUMENT HAVING AN ARTICULATINGEND EFFECTOR," issued March 2, 2010;
公布于2010年7月13日的名称为“SURGICAL STAPLING INSTRUMENTS”的美国专利7,753,245;US Patent 7,753,245, entitled "SURGICAL STAPLING INSTRUMENTS," issued July 13, 2010;
公布于2013年3月12日的名称为“SELECTIVELY ORIENTABLE IMPLANTABLEFASTENER CARTRIDGE”的美国专利8,393,514;U.S. Patent 8,393,514, entitled "SELECTIVELY ORIENTABLE IMPLANTABLEFASTENER CARTRIDGE," issued March 12, 2013;
名称为“SURGICAL INSTRUMENT HAVING RECORDING CAPABILITIES”的美国专利申请序列号11/343,803;现为美国专利7,845,537;US Patent Application Serial No. 11/343,803 entitled "SURGICAL INSTRUMENT HAVING RECORDING CAPABILITIES"; now US Patent 7,845,537;
提交于2008年2月14日的名称为“SURGICAL CUTTING AND FASTENING INSTRUMENTHAVING RF ELECTRODES”的美国专利申请序列号12/031,573;U.S. Patent Application Serial No. 12/031,573, "SURGICAL CUTTING AND FASTENING INSTRUMENTHAVING RF ELECTRODES," filed February 14, 2008;
提交于2008年2月15日的名称为“END EFFECTORS FOR A SURGICAL CUTTING ANDSTAPLING INSTRUMENT”的美国专利申请序列号12/031,873(现为美国专利号7,980,443);U.S. Patent Application Serial No. 12/031,873 (now U.S. Patent No. 7,980,443), filed February 15, 2008, entitled "END EFFECTORS FOR A SURGICAL CUTTING ANDSTAPLING INSTRUMENT";
名称为“MOTOR-DRIVEN SURGICAL CUTTING INSTRUMENT”的美国专利申请序列号12/235,782,现为美国专利8,210,411;US Patent Application Serial No. 12/235,782 entitled "MOTOR-DRIVEN SURGICAL CUTTING INSTRUMENT", now US Patent 8,210,411;
名称为“POWERED SURGICAL CUTTING AND STAPLING APPARATUS WITH MANUALLYRETRACTABLE FIRING SYSTEM”的美国专利申请序列号12/249,117,现为美国专利8,608,045;US Patent Application Serial No. 12/249,117 entitled "POWERED SURGICAL CUTTING AND STAPLING APPARATUS WITH MANUALLY RETRACTABLE FIRING SYSTEM", now US Patent 8,608,045;
提交于2009年12月24日的名称为“MOTOR-DRIVEN SURGICAL CUTTING INSTRUMENTWITH ELECTRIC ACTUATOR DIRECTIONAL CONTROL ASSEMBLY”的美国专利申请序列号12/647,100;现为美国专利号8,220,688;US Patent Application Serial No. 12/647,100, filed December 24, 2009, entitled "MOTOR-DRIVEN SURGICAL CUTTING INSTRUMENTWITH ELECTRIC ACTUATOR DIRECTIONAL CONTROL ASSEMBLY"; now US Patent No. 8,220,688;
提交于2012年9月29日的名称为“STAPLE CARTRIDGE”的美国专利申请序列号12/893,461,现为美国专利号8,733,613;US Patent Application Serial No. 12/893,461, filed September 29, 2012, entitled "STAPLE CARTRIDGE," now US Patent No. 8,733,613;
提交于2011年2月28日的名称为“SURGICAL STAPLING INSTRUMENT”的美国专利申请序列号13/036,647,现为美国专利号8,561,870;US Patent Application Serial No. 13/036,647, "SURGICAL STAPLING INSTRUMENT," filed February 28, 2011, now US Patent No. 8,561,870;
名称为“SURGICAL STAPLING INSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENTARRANGEMENTS”的美国专利申请序列号13/118,241,现为美国专利9,072,535;US Patent Application Serial No. 13/118,241 entitled "SURGICAL STAPLING INSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENTARRANGEMENTS", now US Patent 9,072,535;
提交于2012年6月15日的名称为“ARTICULATABLE SURGICAL INSTRUMENTCOMPRISING A FIRING DRIVE”的美国专利申请序列号13/524,049;现为美国专利号9,101,358;U.S. Patent Application Serial No. 13/524,049, filed June 15, 2012, entitled "ARTICULATABLE SURGICAL INSTRUMENTCOMPRISING A FIRING DRIVE"; now U.S. Patent No. 9,101,358;
提交于2013年3月13日的名称为“STAPLE CARTRIDGE TISSUE THICKNESS SENSORSYSTEM”的美国专利申请序列号13/800,025,现为美国专利申请公布2014/0263551;US Patent Application Serial No. 13/800,025, entitled "STAPLE CARTRIDGE TISSUE THICKNESS SENSORSYSTEM," filed March 13, 2013, now US Patent Application Publication 2014/0263551;
提交于2013年3月13日的名称为“钉仓组织厚度传感器系统(STAPLE CARTRIDGETISSUE THICKNESS SENSOR SYSTEM)”的美国专利申请序列号13/800,067,现为美国专利申请公布号2014/0263552;US Patent Application Serial No. 13/800,067, entitled "STAPLE CARTRIDGETISSUE THICKNESS SENSOR SYSTEM", filed March 13, 2013, now US Patent Application Publication No. 2014/0263552;
提交于2006年1月31日的名称为“SURGICAL CUTTING AND FASTENING INSTRUMENTWITH CLOSURE TRIGGER LOCKING MECHANISM”的美国专利申请公布2007/0175955;并且US Patent Application Publication 2007/0175955, filed January 31, 2006, entitled "SURGICAL CUTTING AND FASTENING INSTRUMENTWITH CLOSURE TRIGGER LOCKING MECHANISM"; and
提交于2010年4月22日的名称为“SURGICAL STAPLING INSTRUMENT WITH ANARTICULATABLE END EFFECTOR”的美国专利申请公布2010/0264194,现为美国专利8,308,040。US Patent Application Publication 2010/0264194, entitled "SURGICAL STAPLING INSTRUMENT WITH ANARTICULATABLE END EFFECTOR," filed April 22, 2010, now US Patent 8,308,040.
虽然本文已结合某些实施方案描述了各种设备,但也可实施对这些实施方案的修改和变型。另外,在公开了用于某些部件的材料的情况下,也可使用其它材料。此外,根据多种实施方案,单个部件可被替换为多个部件,并且多个部件也可被替换为单个部件,以执行给定的一种或多种功能。上述具体实施方式和下述权利要求旨在涵盖所有此类修改和变型。Although various apparatuses have been described herein in connection with certain embodiments, modifications and variations of these embodiments may also be implemented. Additionally, where materials are disclosed for certain components, other materials may also be used. Furthermore, according to various embodiments, a single component may be replaced with multiple components, and multiple components may be replaced with a single component, to perform a given function or functions. The foregoing detailed description and the following claims are intended to cover all such modifications and variations.
本文所公开的装置可被设计成在单次使用后废弃,或者其可被设计成多次使用。然而无论是哪种情况,该设备都可在至少使用一次后经过修整再行使用。修整可以包括以下步骤的组合,包括但不限于拆卸设备、之后清洁或替换设备的特定零件以及设备的后续重新组装。具体地讲,修整设施和/或外科手术团队可以拆卸设备,并且在清洁和/或替换设备的特定零件之后,可以重新组装设备以供后续使用。本领域的技术人员将会理解,修整装置可利用各种技术来进行拆卸、清洁/替换和重新组装。此类技术的使用以及所得的修复装置均在本申请的范围内。The devices disclosed herein can be designed to be disposed of after a single use, or they can be designed to be used multiple times. In either case, however, the device can be reconditioned after at least one use. Reconditioning may include a combination of steps including, but not limited to, disassembly of the device, subsequent cleaning or replacement of specific parts of the device, and subsequent reassembly of the device. Specifically, the refurbishment facility and/or surgical team may disassemble the device, and after cleaning and/or replacing certain parts of the device, the device may be reassembled for subsequent use. Those skilled in the art will appreciate that the trimming device can be disassembled, cleaned/replaced, and reassembled using a variety of techniques. The use of such techniques and the resulting prosthetic devices are within the scope of this application.
本申请中所公开的设备可在外科手术之前进行处理。首先,可获得新的或用过的器械,并且根据需要进行清洁。然后,可对器械进行消毒。在一种灭菌技术中,将所述器械放置在密闭且密封的容器(诸如,塑料或TYVEK袋)中。然后可将容器和器械置于可穿透所述容器的辐射场,诸如γ辐射、X射线或高能电子。辐射可杀死器械上和容器中的细菌。消毒后的器械随后可被储存在无菌容器中。密封容器可将器械保持处于无菌状态,直至在医疗设施中将该容器打开。还可使用本领域已知的任何其它技术对设备进行灭菌,所述技术包括但不限于β或γ辐射、环氧乙烷、等离子过氧化物或蒸汽。The devices disclosed in this application can be processed prior to surgery. First, new or used instruments are available and cleaned as needed. The instruments can then be sterilized. In one sterilization technique, the instrument is placed in a closed and sealed container, such as a plastic or TYVEK bag. The container and instrument can then be exposed to a radiation field that can penetrate the container, such as gamma radiation, X-rays or high-energy electrons. Radiation kills bacteria on instruments and in containers. The sterilized instruments can then be stored in sterile containers. The sealed container keeps the instrument sterile until the container is opened in the medical facility. The device may also be sterilized using any other technique known in the art, including but not limited to beta or gamma radiation, ethylene oxide, plasma peroxide, or steam.
尽管本发明已被描述为具有示例性设计,但可在本公开的实质和范围内进一步修改本发明。因此,本申请旨在涵盖使用本发明的一般原理的本发明的任何变型、用途或改型。While this invention has been described as having an exemplary design, this invention can be further modified within the spirit and scope of this disclosure. Accordingly, this application is intended to cover any adaptations, uses, or adaptations of the invention using the general principles of the invention.
以引用方式全文或部分地并入本文的任何专利、公布或其他公开材料均仅在所并入的材料不与本发明所述的现有定义、陈述或其他公开材料相冲突的范围内并入本文。因此,并且在必要的程度下,本文明确列出的公开内容代替以引用方式并入本文的任何冲突材料。据称以引用方式并入本文但与本文列出的现有定义、陈述或其它公开材料相冲突的任何材料或其部分,将仅在所并入的材料与现有的公开材料之间不产生冲突的程度下并入。Any patent, publication or other disclosure material incorporated herein by reference, in whole or in part, is incorporated only to the extent that the incorporated material does not conflict with existing definitions, statements or other disclosure material described herein This article. Accordingly, and to the extent necessary, the disclosure expressly set forth herein supersedes any conflicting material incorporated herein by reference. Any material, or portion thereof, that is said to be incorporated herein by reference but which conflicts with existing definitions, statements, or other disclosed material set forth herein will only not arise between the incorporated material and the existing disclosed material merged to the extent of conflict.
Claims (9)
Translated fromChineseApplications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/131,295US10478181B2 (en) | 2016-04-18 | 2016-04-18 | Cartridge lockout arrangements for rotary powered surgical cutting and stapling instruments |
| US15/131,295 | 2016-04-18 | ||
| PCT/US2017/027933WO2017184509A1 (en) | 2016-04-18 | 2017-04-17 | Cartridge lockout arrangements for rotary powered surgical cutting and stapling instruments |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109310437A CN109310437A (en) | 2019-02-05 |
| CN109310437Btrue CN109310437B (en) | 2022-04-15 |
Family
ID=65226080
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201780037720.7AActiveCN109310437B (en) | 2016-04-18 | 2017-04-17 | Cartridge Locking Arrangement for Rotating Powered Surgical Cutting and Stapling Instruments |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7071334B2 (en) |
| CN (1) | CN109310437B (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11241235B2 (en)* | 2019-06-28 | 2022-02-08 | Cilag Gmbh International | Method of using multiple RFID chips with a surgical assembly |
| CN116763382B (en)* | 2023-07-06 | 2025-04-15 | 苏州贝诺医疗器械有限公司 | Electric stapler firing structure |
| CN117481726B (en)* | 2023-12-29 | 2024-05-17 | 武汉联影智融医疗科技有限公司 | Electric anastomat |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102743201A (en)* | 2011-04-20 | 2012-10-24 | 苏州天臣国际医疗科技有限公司 | Linear cutting suturing device |
| CN103860221A (en)* | 2012-12-18 | 2014-06-18 | 苏州天臣国际医疗科技有限公司 | Staple head assembly of linear suturing and excising device |
| CN104027145A (en)* | 2014-06-06 | 2014-09-10 | 山东威瑞外科医用制品有限公司 | Anti-misoperation type cutting stapler |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9492146B2 (en) | 2011-10-25 | 2016-11-15 | Covidien Lp | Apparatus for endoscopic procedures |
| US9072536B2 (en) | 2012-06-28 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Differential locking arrangements for rotary powered surgical instruments |
| US8747238B2 (en) | 2012-06-28 | 2014-06-10 | Ethicon Endo-Surgery, Inc. | Rotary drive shaft assemblies for surgical instruments with articulatable end effectors |
| US10470768B2 (en) | 2014-04-16 | 2019-11-12 | Ethicon Llc | Fastener cartridge including a layer attached thereto |
- 2017
- 2017-04-17CNCN201780037720.7Apatent/CN109310437B/enactiveActive
- 2017-04-17JPJP2019505338Apatent/JP7071334B2/enactiveActive
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102743201A (en)* | 2011-04-20 | 2012-10-24 | 苏州天臣国际医疗科技有限公司 | Linear cutting suturing device |
| CN103860221A (en)* | 2012-12-18 | 2014-06-18 | 苏州天臣国际医疗科技有限公司 | Staple head assembly of linear suturing and excising device |
| CN104027145A (en)* | 2014-06-06 | 2014-09-10 | 山东威瑞外科医用制品有限公司 | Anti-misoperation type cutting stapler |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7071334B2 (en) | 2022-05-18 |
| JP2019513529A (en) | 2019-05-30 |
| CN109310437A (en) | 2019-02-05 |
| BR112018071274A2 (en) | 2019-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11559303B2 (en) | Cartridge lockout arrangements for rotary powered surgical cutting and stapling instruments | |
| US11317917B2 (en) | Surgical stapling system comprising a lockable firing assembly | |
| CN109069150B (en) | Surgical instrument including lockout | |
| CN109963516B (en) | Surgical instrument including primary and secondary firing latches | |
| JP7736236B2 (en) | Stapling instrument with independent jaw closure and staple firing systems - Patent Application 20070122997 | |
| EP3838181A1 (en) | Staple cartridge comprising a latch lockout | |
| EP4265204A2 (en) | Staple cartridge comprising driver retention members | |
| EP4176825A1 (en) | Staple cartridge comprising a curved deck surface | |
| EP3838170A1 (en) | Surgical instrument comprising a nested firing member | |
| CN115038389A (en) | Staple cartridge comprising a driver retention member | |
| CN109310437B (en) | Cartridge Locking Arrangement for Rotating Powered Surgical Cutting and Stapling Instruments | |
| CN108135598B (en) | Surgical instrument with progressive rotary drive system | |
| CN112236087B (en) | Suturing apparatus including a deactivatable closure | |
| BR112018071335B1 (en) | SURGICAL INSTRUMENT SYSTEM COMPRISING A LOCK | |
| BR112018071274B1 (en) | END ACTUATOR FOR SURGICAL CUTTING AND STAPING |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |