CN109291803B - Stability control method based on four-wheel all-wheel-drive electric vehicle virtual wheel - Google Patents
Stability control method based on four-wheel all-wheel-drive electric vehicle virtual wheelDownload PDFInfo
- Publication number
- CN109291803B CN109291803BCN201810952188.8ACN201810952188ACN109291803BCN 109291803 BCN109291803 BCN 109291803BCN 201810952188 ACN201810952188 ACN 201810952188ACN 109291803 BCN109291803 BCN 109291803B
- Authority
- CN
- China
- Prior art keywords
- wheel
- control system
- front wheel
- virtual
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription34
- 238000001514detection methodMethods0.000claimsabstractdescription112
- 238000004364calculation methodMethods0.000claimsabstractdescription23
- 238000006243chemical reactionMethods0.000claimsabstractdescription15
- 238000004458analytical methodMethods0.000claimsdescription4
- YBJHBAHKTGYVGT-ZKWXMUAHSA-N(+)-BiotinChemical compoundN1C(=O)N[C@@H]2[C@H](CCCCC(=O)O)SC[C@@H]21YBJHBAHKTGYVGT-ZKWXMUAHSA-N0.000claims1
- 150000001875compoundsChemical class0.000claims1
- FEPMHVLSLDOMQC-UHFFFAOYSA-Nvirginiamycin-S1Natural productsCC1OC(=O)C(C=2C=CC=CC=2)NC(=O)C2CC(=O)CCN2C(=O)C(CC=2C=CC=CC=2)N(C)C(=O)C2CCCN2C(=O)C(CC)NC(=O)C1NC(=O)C1=NC=CC=C1OFEPMHVLSLDOMQC-UHFFFAOYSA-N0.000claims1
- 238000010586diagramMethods0.000description3
- 239000002131composite materialSubstances0.000description2
- 230000007423decreaseEffects0.000description2
- 238000011897real-time detectionMethods0.000description2
- 238000012935AveragingMethods0.000description1
- 230000002159abnormal effectEffects0.000description1
- 230000001133accelerationEffects0.000description1
- 230000003044adaptive effectEffects0.000description1
- 230000005540biological transmissionEffects0.000description1
- 229910052799carbonInorganic materials0.000description1
- 239000003638chemical reducing agentSubstances0.000description1
- 238000011217control strategyMethods0.000description1
- 230000000694effectsEffects0.000description1
- 239000000446fuelSubstances0.000description1
- 230000020169heat generationEffects0.000description1
Images


Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/32—Control or regulation of multiple-unit electrically-propelled vehicles
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Arrangement And Driving Of Transmission Devices (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明公开了一种基于四轮全驱电动汽车虚拟轮的主动转矩分配的稳定性控制方法。The invention discloses a stability control method based on active torque distribution of virtual wheels of a four-wheel full-drive electric vehicle.
背景技术Background technique
电动汽车与传统燃油汽车相比,电动汽车使用成本低,以蓄电池为动力来源,低碳环保,没有换挡的冲击,行驶更加平顺;四轮全驱电动汽车的四个驱动轮受到每个轮毂电机的单独控制,独立调节每个车轮的转速与转矩,提高了驾驶员对汽车的操纵性能,但是由于四个轮有独立的控制单元,不需要通过电动助力转向系统来辅助电动汽车实现转向功能,不需要通过变速箱、减速器等来实现驱动力矩的增减以及车速的改变,不需要通过差速器实现左右轮的差速功能,仅仅依靠驾驶员的感性操纵实现车辆的安全行驶、稳定性的安全是存在风险的,因此需要针对四轮全驱电动汽车的结构特点研发一种自适应主动转矩分配的稳定控制系统。Compared with traditional fuel vehicles, electric vehicles have lower use costs, use batteries as power sources, are low-carbon and environmentally friendly, have no impact on shifting gears, and drive more smoothly; the four driving wheels of four-wheel all-wheel drive electric vehicles are affected by each hub. The individual control of the motor, independently adjusting the speed and torque of each wheel, improves the driver's handling performance of the car, but because the four wheels have independent control units, there is no need to assist the electric vehicle to achieve steering through the electric power steering system It does not need to use the gearbox, reducer, etc. to realize the increase or decrease of the driving torque and the change of the vehicle speed, and does not need to use the differential to realize the differential function of the left and right wheels. The safety of stability is at risk, so it is necessary to develop an adaptive active torque distribution stability control system according to the structural characteristics of four-wheel all-wheel drive electric vehicles.
当车辆在行驶过程中,由于四个车轮通过四个轮毂电机独立驱动,多电机驱动系统受到传动部件、控制系统的非线性影响、低附着路面、路况崎岖等因素的影响,会引起四个车轮的动态不平衡,会产生车辆的偏离行驶路径或发生甩尾等危险现象的发生。When the vehicle is driving, since the four wheels are independently driven by the four in-wheel motors, the multi-motor drive system is affected by the nonlinear influence of the transmission components, the control system, the low-adhesion road surface, the rough road conditions and other factors, which will cause the four wheels The dynamic imbalance of the vehicle will cause dangerous phenomena such as the deviation of the vehicle from the driving path or the occurrence of tail drift.
发明内容SUMMARY OF THE INVENTION
发明目的:Purpose of invention:
本发明公开了一种基于四轮全驱电动汽车虚拟轮的主动转矩分配的稳定性控制方法。目的在于构建一种用于四轮全驱电动汽车转矩分配的方法来解决以往所存在的问题。通过检测四轮全驱电动汽车行驶的路面状态、实时工况来选择相应的转矩分配控制策略,从而使电动汽车操纵性更加流畅,提高稳定性。The invention discloses a stability control method based on active torque distribution of virtual wheels of a four-wheel full-drive electric vehicle. The purpose is to build a torque distribution method for four-wheel all-wheel drive electric vehicles to solve the problems in the past. By detecting the road state and real-time working conditions of the four-wheel all-wheel drive electric vehicle, the corresponding torque distribution control strategy is selected, so that the maneuverability of the electric vehicle is smoother and the stability is improved.
技术方案:Technical solutions:
一种面向四轮全驱电动汽车虚拟轮的主动转矩分配的稳定性控制系统,该系统包括差速机构(1)、虚拟轮电机控制系统(2)、左前轮轮毂电机及控制系统 (3)、右前轮轮毂电机及控制系统(4)、左后轮轮毂电机及控制系统(5)、右后轮轮毂电机及控制系统(6)、左前轮轮速检测单元(11)、右前轮轮速检测单元 (12)、左后轮轮速检测单元(13)、右后轮轮速检测单元(14)、加权平均单元 (16)、理想姿态计算单元(17)、误差控制器(18)、转矩分配控制单元(19)、转向机构单元(20)、虚拟轮(21)、数值转化单元(23)和驾驶员操纵机构(24);A stability control system for active torque distribution of virtual wheels of a four-wheel full-drive electric vehicle, the system comprises a differential mechanism (1), a virtual wheel motor control system (2), a left front wheel hub motor and a control system ( 3), right front wheel hub motor and control system (4), left rear wheel hub motor and control system (5), right rear wheel hub motor and control system (6), left front wheel wheel speed detection unit (11), Right front wheel speed detection unit (12), left rear wheel speed detection unit (13), right rear wheel speed detection unit (14), weighted average unit (16), ideal attitude calculation unit (17), error control a controller (18), a torque distribution control unit (19), a steering mechanism unit (20), a virtual wheel (21), a value conversion unit (23) and a driver operating mechanism (24);
驾驶员操纵机构(24)连接差速机构(1)、虚拟轮及虚拟轮电机控制系统(2) 和理想姿态计算单元(17);差速机构(1)连接虚拟轮及虚拟轮电机控制系统(2)、左前轮轮毂电机及控制系统(3)、右前轮轮毂电机及控制系统(4)、左后轮轮毂电机及控制系统(5)和右后轮轮毂电机及控制系统(6);左前轮轮毂电机及控制系统(3)、右前轮轮毂电机及控制系统(4)、左后轮轮毂电机及控制系统(5) 和右后轮轮毂电机及控制系统(6)分别连接左前轮(7)、右前轮(8)、左后轮 (9)和右后轮(10);左前轮轮速检测单元(11)、右前轮轮速检测单元(12)、左后轮轮速检测单元(13)和右后轮轮速检测单元(14)对应左前轮(7)、右前轮(8)、左后轮(9)和右后轮(10)设置用于检测相应轮的转速;左前轮轮速检测单元(11)、右前轮轮速检测单元(12)、左后轮轮速检测单元(13)、右后轮轮速检测单元(14)连接至差速机构(1),进行四个车轮的理想轮速与实际轮速的偏差分析;The driver operating mechanism (24) is connected with the differential mechanism (1), the virtual wheel and the virtual wheel motor control system (2) and the ideal attitude calculation unit (17); the differential mechanism (1) is connected with the virtual wheel and the virtual wheel motor control system (2), left front wheel hub motor and control system (3), right front wheel hub motor and control system (4), left rear wheel hub motor and control system (5) and right rear wheel hub motor and control system (6) ); left front wheel hub motor and control system (3), right front wheel hub motor and control system (4), left rear wheel hub motor and control system (5) and right rear wheel hub motor and control system (6) respectively Connect the left front wheel (7), right front wheel (8), left rear wheel (9) and right rear wheel (10); left front wheel speed detection unit (11), right front wheel wheel speed detection unit (12) , The left rear wheel speed detection unit (13) and the right rear wheel speed detection unit (14) correspond to the left front wheel (7), the right front wheel (8), the left rear wheel (9) and the right rear wheel (10) Set to detect the rotation speed of the corresponding wheel; the left front wheel wheel speed detection unit (11), the right front wheel wheel speed detection unit (12), the left rear wheel wheel speed detection unit (13), the right rear wheel wheel speed detection unit ( 14) Connect to the differential mechanism (1) to analyze the deviation between the ideal wheel speed and the actual wheel speed of the four wheels;
虚拟轮及虚拟轮电机控制系统(2)连接理想姿态计算单元(17)和加权平均单元(16),理想姿态计算单元(17)连接误差控制器(18),误差控制器(18) 连接转矩分配控制器(19)和转向机构单元(20),加权平均单元(16)与转矩分配控制器(19)、左前轮轮毂电机及控制系统(3)、右前轮轮毂电机及控制系统(4)、左后轮轮毂电机及控制系统(5)和右后轮轮毂电机及控制系统(6)相连接,计算出车辆行驶过程中四个车轮需要的复合实时转矩;The virtual wheel and the virtual wheel motor control system (2) are connected to an ideal attitude calculation unit (17) and a weighted average unit (16), the ideal attitude calculation unit (17) is connected to an error controller (18), and the error controller (18) is connected to the rotation Torque distribution controller (19) and steering mechanism unit (20), weighted average unit (16) and torque distribution controller (19), left front wheel hub motor and control system (3), right front wheel hub motor and control The system (4), the left rear wheel hub motor and the control system (5) are connected with the right rear wheel hub motor and the control system (6), and the composite real-time torque required by the four wheels during the running process of the vehicle is calculated;
左前轮轮速检测单元(11)、右前轮轮速检测单元(12)、左后轮轮速检测单元(13)和右后轮轮速检测单元(14)实时获取车轮行驶速度;The left front wheel wheel speed detection unit (11), the right front wheel wheel speed detection unit (12), the left rear wheel wheel speed detection unit (13) and the right rear wheel wheel speed detection unit (14) acquire the wheel speed in real time;
虚拟轮及虚拟轮电机控制系统(2)能根据加权平均单元(16)的结果实时更改左前轮、右前轮、左后轮、右后轮的轮速,进而进行实时的转矩稳定分配;The virtual wheel and the virtual wheel motor control system (2) can change the wheel speeds of the left front wheel, the right front wheel, the left rear wheel, and the right rear wheel in real time according to the results of the weighted average unit (16), thereby performing real-time stable torque distribution ;
该系统还包括横摆角速度检测单元(25)和质心侧偏角检测单元(26),横摆角速度检测单元(25)和质心侧偏角检测单元(26)连接至理想姿态单元(17),实时判断车辆行驶的姿态情况;The system further comprises a yaw rate detection unit (25) and a center of mass sideslip angle detection unit (26), the yaw rate detection unit (25) and the center of mass sideslip angle detection unit (26) are connected to the ideal attitude unit (17), Real-time judgment of the attitude of the vehicle;
虚拟轮及虚拟轮电机控制系统(2)由虚拟轮(21)、虚拟轮电机(22)和数值转化单元(23)构成;差速机构(1)与虚拟轮(21)连接;加权平均单元(16)与虚拟轮 (21)和虚拟轮电机(22)连接;数值转化单元(23)将虚拟轮电机(22)与差速机构(1)相连接。The virtual wheel and the virtual wheel motor control system (2) are composed of a virtual wheel (21), a virtual wheel motor (22) and a numerical value conversion unit (23); a differential mechanism (1) is connected with the virtual wheel (21); a weighted average unit (16) is connected with the virtual wheel (21) and the virtual wheel motor (22); the numerical value conversion unit (23) connects the virtual wheel motor (22) with the differential mechanism (1).
利用上述的一种面向四轮全驱电动汽车虚拟轮的主动转矩分配的稳定性控制系统所实施的控制方法,其特征在于:该方法利用车轮牵引电机的电压、电流值检测电磁转矩信息,当由于路况条件不佳,导致某个轮胎的轮毂电机转矩变大,车轮牵引电机的电磁转矩会随之增加,此时,利用四个轮速检测单元检测轮速,将信息反馈到轮毂电机控制系统,由加权平均单元计算转矩值,合理分配转矩,再次通过差速机构(1)的给定车速,进行多电机的动态协同控制,实时纠正驾驶路径,提高车辆的操纵稳定性,控制车辆的姿态;The control method implemented by using the above-mentioned stability control system for active torque distribution of the virtual wheels of the four-wheel full-drive electric vehicle is characterized in that: the method uses the voltage and current values of the traction motors of the wheels to detect the electromagnetic torque information , when the in-wheel motor torque of a tire becomes larger due to poor road conditions, the electromagnetic torque of the wheel traction motor will increase accordingly. At this time, the four wheel speed detection units are used to detect the wheel speed and feed back the information to The in-wheel motor control system calculates the torque value by the weighted average unit, distributes the torque reasonably, and performs dynamic cooperative control of multiple motors through the given vehicle speed of the differential mechanism (1) again, corrects the driving path in real time, and improves the steering stability of the vehicle sex, control the attitude of the vehicle;
具体的说,该方法利用差速机构(1),通过电动汽车实际方向转角与实际车速计算出四个车轮的理想转速V1、V2、V3、V4,左前轮轮速检测单元(11)、右前轮轮速检测单元(12)、左后轮轮速检测单元(13)和右后轮轮速检测单元(14) 实时检测到四个车轮的轮速并反馈回差速机构(1),进而进行误差分析,给到左前轮轮毂电机及控制系统(3)、右前轮轮毂电机及控制系统(4)、左后轮轮毂电机及控制系统(5)和右后轮轮毂电机及控制系统(6)进行转矩给定,如遇到某一轮毂电机转矩过大,控制系统会将四个车轮的转矩通过加权平均单元(16),对转矩进行合理的加权平均,通过虚拟轮及虚拟轮电机控制系统(2)对四个车轮轮速进行重新给定,使车辆达到安全稳定状态。Specifically, the method uses the differential mechanism (1) to calculate the ideal rotational speeds V1 , V2 , V3 , V4 of the four wheels through the actual steering angle of the electric vehicle and the actual vehicle speed, and the left front wheel wheel speed detection unit (11), right front wheel speed detection unit (12), left rear wheel speed detection unit (13) and right rear wheel speed detection unit (14) real-time detection of the wheel speeds of the four wheels and feedback to the differential Mechanism (1), and then carry out error analysis, to the left front wheel hub motor and control system (3), right front wheel hub motor and control system (4), left rear wheel hub motor and control system (5) and right rear wheel hub motor and control system (5) The in-wheel motor and the control system (6) provide torque. If the torque of a certain in-wheel motor is too large, the control system will pass the torques of the four wheels through the weighted average unit (16) to make a reasonable calculation of the torque. The weighted average of the four wheels is re-given by the virtual wheel and the virtual wheel motor control system (2), so that the vehicle can reach a safe and stable state.
利用车辆理想姿态计算单元(17),通过电动汽车实际方向转角与实际车速计算出车辆行驶稳定的理想横摆角速度与质心侧偏角,车辆在行驶过程中,通过整车模型(15)实时反馈数据,误差控制器(18)对数据进行分析,通过转向机构(20)对车辆实行合理安全转向角调整,通过转矩分配控制器(19)合理的对左前轮、右前轮、左后轮、右后轮的转矩进行稳定补偿,使之达到合理的转矩分配,使车辆稳定行驶;Using the vehicle ideal attitude calculation unit (17), the ideal yaw rate and the center of mass sideslip angle for stable driving of the vehicle are calculated through the actual steering angle and actual vehicle speed of the electric vehicle. Data, the error controller (18) analyzes the data, implements a reasonable and safe steering angle adjustment to the vehicle through the steering mechanism (20), and reasonably adjusts the left front wheel, the right front wheel, and the left rear wheel through the torque distribution controller (19). The torque of the wheel and the right rear wheel is stably compensated to achieve a reasonable torque distribution and make the vehicle run stably;
误差控制器采用PI控制算法,PI控制算法根据理想横摆角速度、理想质心侧偏角与实际横摆角速度、实际质心侧偏角之间的偏差,实时纠正四轮电机驱动转矩,得到实现理想驾驶路径的横摆力矩和期望的前轮补偿角,使车辆能按照驾驶指令行驶。The error controller adopts the PI control algorithm. The PI control algorithm corrects the driving torque of the four-wheel motor in real time according to the deviation between the ideal yaw rate, the ideal center of mass slip angle and the actual yaw rate and the actual center of mass slip angle, and achieves the ideal The yaw moment of the driving path and the desired front wheel compensation angle allow the vehicle to follow the driving commands.
当路面条件不佳或者出现凹凸不平路面时,左前轮轮毂电机及控制系统(3)、右前轮轮毂电机及控制系统(4)、左后轮轮毂电机及控制系统(5)和右后轮轮毂电机及控制系统(6)开始自身调节,之后虚拟轮及虚拟轮电机控制系统再根据负载转矩的变化更新Δω*。When the road conditions are poor or the road surface is uneven, the left front wheel hub motor and control system (3), the right front wheel hub motor and control system (4), the left rear wheel hub motor and control system (5) and the right rear wheel hub motor and control system (5) The wheel hub motor and the control system (6) start to adjust themselves, and then the virtual wheel and the virtual wheel motor control system update Δω* according to the change of the load torque.
给定理想车辆速度,正常行驶直接将理想速度给到差速机构(1);当某一轮毂电机力矩变大,转矩经过加权平均单元(16)与虚拟轮电机(22)相连接,经过数值转化单元(23)与差速机构(1)连接,重新给定符合行驶工况的四轮车速,使车辆达到稳定状态。Given the ideal vehicle speed, the ideal speed is directly given to the differential mechanism (1) in normal driving; when the torque of a certain wheel hub motor becomes larger, the torque is connected with the virtual wheel motor (22) through the weighted average unit (16), The numerical value conversion unit (23) is connected with the differential mechanism (1), and re-sets the four-wheel vehicle speed in accordance with the driving condition, so that the vehicle reaches a stable state.
差速机构(1)通过整车质心速度与转向角度,分析出左前轮、右前轮、左后轮、右后轮的实时理想状态轮速,理想轮速方程如下:The differential mechanism (1) analyzes the real-time ideal wheel speeds of the left front wheel, right front wheel, left rear wheel, and right rear wheel through the center of mass velocity and steering angle of the vehicle. The ideal wheel speed equation is as follows:




V1、V2、V3、V4,分别为前内侧轮速度、前外侧轮速度、后外侧轮速度、后内侧轮速度,V为后轴中点速度,δin为内轮转角,δout为外轮转角,B为轮距,L为轴距。V1 , V2 , V3 , V4 are the speed of the front inner wheel, the front outer wheel speed, the rear outer wheel speed, and the rear inner wheel speed, respectively, V is the midpoint speed of the rear axle, δin is the inner wheel angle, δout is the outer wheel angle, B is the wheelbase, and L is the wheelbase.
虚拟轮电机可用如下关系式表示,The virtual wheel motor can be expressed by the following relation:

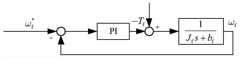
式中,i=1,2,3,4,分别代表四个轮毂电机;ωi为电机的转速;ui为转矩控制量即电磁转矩;Ji为等效的转动惯量;bi为摩擦因数;S为积分。In the formula, i=1, 2, 3, and 4, representing four in-wheel motors respectively; ωi is the speed of the motor; ui is the torque control amount, that is, the electromagnetic torque; Ji is the equivalent moment of inertia; bi is the friction factor; S is the integral.
9、根据权利4所述的控制方法,其特征在于:转矩分配控制器可用如下关系式,9. The control method according to claim 4, wherein the torque distribution controller can use the following relational formula:

ΔFzbc=Fxfl-s+Fxfr-s+Fxrl-s+Fxrr-sΔFzbc =Fxfl-s +Fxfr-s +Fxrl-s +Fxrr-s
ΔN表示车辆的横摆力矩,ΔFzbc表示驾驶员期望的纵向驱动力,Fxfl-s、Fxfr-s、Fxrl-s、 Fxrr-s分别为左前轮、右前轮、左后轮、右后轮的轮胎纵向力目标值,Fyfl-s、Fyfr-s分别为左前轮、右前轮的轮胎侧向力目标值。lf表示质心至前轴的距离,Tf表示车轮转矩。左前轮和右前轮的轮胎侧向力与相应的地面摩擦圆大小成比例,即相应轮胎的路面摩擦圆越大,则其提供的轮胎侧向力相应的越大,即:ΔN represents the yaw moment of the vehicle, ΔFzbc represents the driver’s desired longitudinal driving force, Fxfl-s , Fxfr-s , Fxrl-s , and Fxrr-s are the left front wheel, the right front wheel, and the left rear, respectively Fyfl-s and Fyfr-s are the tire lateral force target values of the left front wheel and the right front wheel, respectively. lf is the distance from the center of mass to the front axle, and Tf is the wheel torque. The tire lateral force of the left front wheel and the right front wheel is proportional to the size of the corresponding ground friction circle, that is, the larger the road friction circle of the corresponding tire, the greater the tire lateral force provided by it, namely:

Fyfl-s、Fyfr-s分别为左前轮、右前轮的轮胎侧向力目标值,Fzfl、Fzfr分别为左前轮、右前轮的轮胎垂向载荷,μ为车轮与地面的摩擦系数。Fyfl-s and Fyfr-s are the tire lateral force target values of the left front wheel and the right front wheel, respectively, Fzfl and Fzfr are the tire vertical loads of the left front wheel and the right front wheel, respectively, μ is the wheel and the The coefficient of friction of the ground.
转矩检测单元即左前轮轮速检测单元(11)、右前轮轮速检测单元(12)、左后轮轮速检测单元(13)和右后轮轮速检测单元(14)实时获取车辆四个轮毂电机的转速并进行合理的转矩分配,车轮侧向力主要由转向轮提供,将前两个车轮的纵向力、侧向力和后两个车轮的纵向力6个参数作为分配目标,以四个轮胎产生的轮胎力占各自车轮的摩擦圆比重最小为最优目标,构造目标函数转矩分配最优目标函数关系式The torque detection unit, that is, the left front wheel speed detection unit (11), the right front wheel speed detection unit (12), the left rear wheel speed detection unit (13) and the right rear wheel speed detection unit (14) obtain the real-time acquisition The speed of the four in-wheel motors of the vehicle and the reasonable torque distribution, the lateral force of the wheel is mainly provided by the steering wheel, and the longitudinal force of the front two wheels, the lateral force and the longitudinal force of the rear two wheels are distributed as six parameters The objective is to take the smallest proportion of the tire force generated by the four tires in the friction circle of each wheel as the optimal objective, and construct the objective function torque distribution optimal objective function relational expression





其中,Js为目标约束函数,cxfl、cxfr、cxrl、cxrr分别为左前轮、右前轮、左后轮、右后轮的纵向力权重系数,cyfl、cyfr分别为左前轮、右前轮的侧向力权重系数,Fzfl、Fzfr、Fzrl、Fzrr分别为左前轮、右前轮、左后轮、右后轮的轮胎垂向载荷,
差速机构过车辆的实际车速v与转向角δ,采用Ackermann差速方法,分析得到右前轮、左前轮、右后轮、左后轮的理想轮速。The differential mechanism passes through the actual vehicle speed v and steering angle δ of the vehicle, and uses the Ackermann differential method to analyze and obtain the ideal wheel speeds of the right front wheel, left front wheel, right rear wheel and left rear wheel.
优点及效果:一种面向四轮全驱电动汽车虚拟轮的主动转矩分配的稳定性控制方法,该系统包括驾驶员操纵机构、虚拟轮、虚拟轮电机控制单元、加权平均单元、左前轮轮速检测单元、右前轮轮速检测单元、左后轮轮速检测单元、右后轮轮速检测单元、左前轮轮毂电机及控制系统、右前轮轮毂电机及控制系统、左后轮轮毂电机及控制系统、右后轮轮毂电机及控制系统、横摆角速度检测单元、质心侧偏角检测单元、转矩分配控制单元、差速机构、数值转化单元、理想姿态计算单元、转向机构单元、误差控制器、整车模型。Advantages and effects: a stability control method for active torque distribution of virtual wheels of a four-wheel all-wheel drive electric vehicle, the system includes a driver steering mechanism, a virtual wheel, a virtual wheel motor control unit, a weighted average unit, and a left front wheel. Wheel speed detection unit, right front wheel wheel speed detection unit, left rear wheel wheel speed detection unit, right rear wheel wheel speed detection unit, left front wheel hub motor and control system, right front wheel hub motor and control system, left rear wheel In-wheel motor and control system, right rear wheel in-wheel motor and control system, yaw rate detection unit, center of mass slip angle detection unit, torque distribution control unit, differential mechanism, numerical conversion unit, ideal attitude calculation unit, steering mechanism unit , error controller, vehicle model.
所述的驾驶员操纵机构给定车辆的转向角和车辆的速度。所述的左前轮轮速检测单元、右前轮轮速检测单元、左后轮轮速检测单元、右后轮轮速检测单元、整车速度检测单元实时获取车辆行驶速度。所述的左前轮轮毂电机及控制系统、右前轮轮毂电机及控制系统、左后轮轮毂电机及控制系统、右后轮轮毂电机及控制系统通过转速检测单元反馈回的轮速可以给定四个车轮的理想转矩。所述的整车模型包含了横摆角速度检测单元、质心侧偏角检测单元,可以实时获取车辆姿态。所述的转矩检测单元可以获取左前轮、右前轮、左后轮、右后轮的实时给定转矩。所述的虚拟轮和虚拟轮电机控制单元可以根据加权平均单元的转矩结果实时更改左前轮、右前轮、左后轮、右后轮的轮速。所述的转矩分配控制单元可以根据车辆姿态对给定转矩进行实时补偿。所述的差速机构可以根据整车速度和转向角度,分析出左前轮、右前轮、左后轮、右后轮的实时理想状态轮速。Said driver steering mechanism specifies the steering angle of the vehicle and the speed of the vehicle. The left front wheel speed detection unit, the right front wheel speed detection unit, the left rear wheel speed detection unit, the right rear wheel speed detection unit, and the vehicle speed detection unit acquire the vehicle running speed in real time. The in-wheel motor and control system of the left front wheel, the in-wheel motor and control system of the right front wheel, the in-wheel motor and control system of the left rear wheel, the in-wheel motor and the control system of the right rear wheel, and the wheel speed fed back by the rotational speed detection unit can be given. Ideal torque for all four wheels. The whole vehicle model includes a yaw rate detection unit and a center of mass sideslip angle detection unit, which can acquire the vehicle attitude in real time. The torque detection unit can acquire the real-time given torques of the left front wheel, the right front wheel, the left rear wheel and the right rear wheel. The virtual wheel and the virtual wheel motor control unit can change the wheel speeds of the left front wheel, the right front wheel, the left rear wheel and the right rear wheel in real time according to the torque result of the weighted average unit. The torque distribution control unit can compensate the given torque in real time according to the vehicle attitude. The differential mechanism can analyze the real-time ideal wheel speeds of the left front wheel, the right front wheel, the left rear wheel and the right rear wheel according to the speed of the whole vehicle and the steering angle.
所述的理想姿态计算单元可以根据整车速度和转向角度,分析出理想的横摆角速度和质心侧偏角。所述的误差控制器可以使整车的真实姿态与理想姿态的偏差减小,进而进行转矩补偿。所述的转向机构单元经过误差控制器后,可以自动的补偿人为操纵产生的转向角度的误差。The ideal attitude calculation unit can analyze the ideal yaw rate and the side slip angle of the center of mass according to the vehicle speed and steering angle. The error controller can reduce the deviation between the real posture of the whole vehicle and the ideal posture, and then perform torque compensation. After the steering mechanism unit passes through the error controller, it can automatically compensate the steering angle error generated by human manipulation.
本发明在车辆行驶过程中,当四轮牵引电机中的某一个轮毂电机由于路面状况出现转矩非正常增大的情况,牵引力需求就会超过电机可能提供的最大转矩,就会形成轮毂电机的发热、四轮转矩失衡、车辆甩尾、车辆行驶路径偏离理想驾驶路径等危险现象。According to the present invention, during the driving process of the vehicle, when a certain in-wheel motor in the four-wheel traction motor has abnormal increase in torque due to the road surface condition, the traction force demand will exceed the maximum torque that the motor may provide, and the in-wheel motor will be formed. Dangerous phenomena such as heat generation, four-wheel torque imbalance, vehicle drift, and vehicle driving path deviation from the ideal driving path.
本发明针对四轮全驱电动汽车轮毂电机独立驱动的特点,将任一轮毂电机转矩过大的动态扰动通过加权平均、虚拟轮控制系统分配到四轮全驱电动汽车的每一个牵引电机系统,动态平衡了四轮转矩,同时稳定平衡了四轮轮速,避免车辆行驶轨迹大幅偏离驾驶指令,提高车辆对行驶指令的跟踪能力。Aiming at the independent driving characteristics of the in-wheel motor of the four-wheel full-drive electric vehicle, the present invention distributes the dynamic disturbance of any in-wheel motor with excessive torque to each traction motor system of the four-wheel full-drive electric vehicle through the weighted average and virtual wheel control system , Dynamically balance the torque of the four wheels, and at the same time stably balance the wheel speeds of the four wheels, so as to prevent the vehicle's driving trajectory from deviating greatly from the driving command, and improve the vehicle's ability to track the driving command.
附图说明:Description of drawings:
图1为四轮全驱电动汽车虚拟轮的主动转矩分配的稳定性控制总体结构框图。Figure 1 is a block diagram of the overall structure of the stability control of the active torque distribution of the virtual wheels of the four-wheel all-wheel drive electric vehicle.
图2为虚拟轮电机控制系统结构框图。Figure 2 is a block diagram of the virtual wheel motor control system.
图3为虚拟轮及虚拟轮电机控制系统结构框图。FIG. 3 is a structural block diagram of a virtual wheel and a virtual wheel motor control system.
具体实施措施:Specific implementation measures:
一种面向四轮全驱电动汽车虚拟轮的主动转矩分配的稳定性控制系统,该系统包括差速机构(1)、虚拟轮电机控制系统(2)、左前轮轮毂电机及控制系统 (3)、右前轮轮毂电机及控制系统(4)、左后轮轮毂电机及控制系统(5)、右后轮轮毂电机及控制系统(6)、左前轮轮速检测单元(11)、右前轮轮速检测单元 (12)、左后轮轮速检测单元(13)、右后轮轮速检测单元(14)、加权平均单元 (16)、理想姿态计算单元(17)、误差控制器(18)、转矩分配控制单元(19)、转向机构单元(20)、虚拟轮(21)、数值转化单元(23)和驾驶员操纵机构(24);A stability control system for active torque distribution of virtual wheels of a four-wheel full-drive electric vehicle, the system comprises a differential mechanism (1), a virtual wheel motor control system (2), a left front wheel hub motor and a control system ( 3), right front wheel hub motor and control system (4), left rear wheel hub motor and control system (5), right rear wheel hub motor and control system (6), left front wheel wheel speed detection unit (11), Right front wheel speed detection unit (12), left rear wheel speed detection unit (13), right rear wheel speed detection unit (14), weighted average unit (16), ideal attitude calculation unit (17), error control a controller (18), a torque distribution control unit (19), a steering mechanism unit (20), a virtual wheel (21), a value conversion unit (23) and a driver operating mechanism (24);
驾驶员操纵机构(24)连接差速机构(1)、虚拟轮及虚拟轮电机控制系统(2) 和理想姿态计算单元(17);差速机构(1)连接虚拟轮及虚拟轮电机控制系统(2)、左前轮轮毂电机及控制系统(3)、右前轮轮毂电机及控制系统(4)、左后轮轮毂电机及控制系统(5)和右后轮轮毂电机及控制系统(6);左前轮轮毂电机及控制系统(3)、右前轮轮毂电机及控制系统(4)、左后轮轮毂电机及控制系统(5) 和右后轮轮毂电机及控制系统(6)分别连接左前轮(7)、右前轮(8)、左后轮 (9)和右后轮(10);左前轮轮速检测单元(11)、右前轮轮速检测单元(12)、左后轮轮速检测单元(13)和右后轮轮速检测单元(14)对应左前轮(7)、右前轮(8)、左后轮(9)和右后轮(10)设置用于检测相应轮的转速;左前轮轮速检测单元(11)、右前轮轮速检测单元(12)、左后轮轮速检测单元(13)、右后轮轮速检测单元(14)连接至差速机构(1),进行四个车轮的理想轮速与实际轮速的偏差分析;The driver operating mechanism (24) is connected with the differential mechanism (1), the virtual wheel and the virtual wheel motor control system (2) and the ideal attitude calculation unit (17); the differential mechanism (1) is connected with the virtual wheel and the virtual wheel motor control system (2), left front wheel hub motor and control system (3), right front wheel hub motor and control system (4), left rear wheel hub motor and control system (5) and right rear wheel hub motor and control system (6) ); left front wheel hub motor and control system (3), right front wheel hub motor and control system (4), left rear wheel hub motor and control system (5) and right rear wheel hub motor and control system (6) respectively Connect the left front wheel (7), right front wheel (8), left rear wheel (9) and right rear wheel (10); left front wheel speed detection unit (11), right front wheel wheel speed detection unit (12) , The left rear wheel speed detection unit (13) and the right rear wheel speed detection unit (14) correspond to the left front wheel (7), the right front wheel (8), the left rear wheel (9) and the right rear wheel (10) Set to detect the rotation speed of the corresponding wheel; the left front wheel wheel speed detection unit (11), the right front wheel wheel speed detection unit (12), the left rear wheel wheel speed detection unit (13), the right rear wheel wheel speed detection unit ( 14) Connect to the differential mechanism (1) to analyze the deviation between the ideal wheel speed and the actual wheel speed of the four wheels;
虚拟轮及虚拟轮电机控制系统(2)连接理想姿态计算单元(17)和加权平均单元(16),理想姿态计算单元(17)连接误差控制器(18),误差控制器(18) 连接转矩分配控制器(19)和转向机构单元(20),加权平均单元(16)与转矩分配控制器(19)、左前轮轮毂电机及控制系统(3)、右前轮轮毂电机及控制系统(4)、左后轮轮毂电机及控制系统(5)和右后轮轮毂电机及控制系统(6)相连接,计算出车辆行驶过程中四个车轮需要的复合实时转矩;The virtual wheel and the virtual wheel motor control system (2) are connected to an ideal attitude calculation unit (17) and a weighted average unit (16), the ideal attitude calculation unit (17) is connected to an error controller (18), and the error controller (18) is connected to the rotation Torque distribution controller (19) and steering mechanism unit (20), weighted average unit (16) and torque distribution controller (19), left front wheel hub motor and control system (3), right front wheel hub motor and control The system (4), the left rear wheel hub motor and the control system (5) are connected with the right rear wheel hub motor and the control system (6), and the composite real-time torque required by the four wheels during the running process of the vehicle is calculated;
左前轮轮速检测单元(11)、右前轮轮速检测单元(12)、左后轮轮速检测单元(13)和右后轮轮速检测单元(14)实时获取车轮行驶速度;The left front wheel wheel speed detection unit (11), the right front wheel wheel speed detection unit (12), the left rear wheel wheel speed detection unit (13) and the right rear wheel wheel speed detection unit (14) acquire the wheel speed in real time;
虚拟轮及虚拟轮电机控制系统(2)能根据加权平均单元(16)的结果实时更改左前轮、右前轮、左后轮、右后轮的轮速,进而进行实时的转矩稳定分配;The virtual wheel and the virtual wheel motor control system (2) can change the wheel speeds of the left front wheel, the right front wheel, the left rear wheel, and the right rear wheel in real time according to the results of the weighted average unit (16), thereby performing real-time stable torque distribution ;
该系统还包括横摆角速度检测单元(25)和质心侧偏角检测单元(26),横摆角速度检测单元(25)和质心侧偏角检测单元(26)连接至理想姿态单元(17),实时判断车辆行驶的姿态情况;The system further comprises a yaw rate detection unit (25) and a center of mass sideslip angle detection unit (26), the yaw rate detection unit (25) and the center of mass sideslip angle detection unit (26) are connected to the ideal attitude unit (17), Real-time judgment of the attitude of the vehicle;
虚拟轮及虚拟轮电机控制系统(2)由虚拟轮(21)、虚拟轮电机(22)和数值转化单元(23)构成;差速机构(1)与虚拟轮(21)连接;加权平均单元(16)与虚拟轮 (21)和虚拟轮电机(22)连接;数值转化单元(23)将虚拟轮电机(22)与差速机构(1)相连接。The virtual wheel and the virtual wheel motor control system (2) are composed of a virtual wheel (21), a virtual wheel motor (22) and a numerical value conversion unit (23); a differential mechanism (1) is connected with the virtual wheel (21); a weighted average unit (16) is connected with the virtual wheel (21) and the virtual wheel motor (22); the numerical value conversion unit (23) connects the virtual wheel motor (22) with the differential mechanism (1).
利用上述的一种面向四轮全驱电动汽车虚拟轮的主动转矩分配的稳定性控制系统所实施的控制方法,其特征在于:该方法利用车轮牵引电机的电压、电流值检测电磁转矩信息,当由于路况条件不佳,导致某个轮胎的轮毂电机转矩变大,车轮牵引电机的电磁转矩会随之增加,此时,利用四个轮速检测单元检测轮速,将信息反馈到轮毂电机控制系统,由加权平均单元计算转矩值,合理分配转矩,再次通过差速机构(1)的给定车速,进行多电机的动态协同控制,实时纠正驾驶路径,提高车辆的操纵稳定性,控制车辆的姿态;The control method implemented by using the above-mentioned stability control system for active torque distribution of the virtual wheels of the four-wheel full-drive electric vehicle is characterized in that: the method uses the voltage and current values of the traction motors of the wheels to detect the electromagnetic torque information , when the in-wheel motor torque of a tire becomes larger due to poor road conditions, the electromagnetic torque of the wheel traction motor will increase accordingly. At this time, the four wheel speed detection units are used to detect the wheel speed and feed back the information to The in-wheel motor control system calculates the torque value by the weighted average unit, distributes the torque reasonably, and performs dynamic cooperative control of multiple motors through the given vehicle speed of the differential mechanism (1) again, corrects the driving path in real time, and improves the steering stability of the vehicle sex, control the attitude of the vehicle;
具体的说,该方法利用差速机构(1),通过电动汽车实际方向转角与实际车速计算出四个车轮的理想转速V1、V2、V3、V4,左前轮轮速检测单元(11)、右前轮轮速检测单元(12)、左后轮轮速检测单元(13)和右后轮轮速检测单元(14) 实时检测到四个车轮的轮速并反馈回差速机构(1),进而进行误差分析,给到左前轮轮毂电机及控制系统(3)、右前轮轮毂电机及控制系统(4)、左后轮轮毂电机及控制系统(5)和右后轮轮毂电机及控制系统(6)进行转矩给定,如遇到某一轮毂电机转矩过大,控制系统会将四个车轮的转矩通过加权平均单元(16),对转矩进行合理的加权平均,通过虚拟轮及虚拟轮电机控制系统(2)对四个车轮轮速进行重新给定,使车辆达到安全稳定状态。Specifically, the method uses the differential mechanism (1) to calculate the ideal rotational speeds V1 , V2 , V3 , V4 of the four wheels through the actual steering angle of the electric vehicle and the actual vehicle speed, and the left front wheel wheel speed detection unit (11), right front wheel speed detection unit (12), left rear wheel speed detection unit (13) and right rear wheel speed detection unit (14) real-time detection of the wheel speeds of the four wheels and feedback to the differential Mechanism (1), and then carry out error analysis, to the left front wheel hub motor and control system (3), right front wheel hub motor and control system (4), left rear wheel hub motor and control system (5) and right rear wheel hub motor and control system (5) The in-wheel motor and the control system (6) provide torque. If the torque of a certain in-wheel motor is too large, the control system will pass the torques of the four wheels through the weighted average unit (16) to make a reasonable calculation of the torque. The weighted average of the four wheels is re-given by the virtual wheel and the virtual wheel motor control system (2), so that the vehicle can reach a safe and stable state.
利用车辆理想姿态计算单元(17),通过电动汽车实际方向转角与实际车速计算出车辆行驶稳定的理想横摆角速度与质心侧偏角,车辆在行驶过程中,通过整车模型(15)实时反馈数据,误差控制器(18)对数据进行分析,通过转向机构(20)对车辆实行合理安全转向角调整,通过转矩分配控制器(19)合理的对左前轮、右前轮、左后轮、右后轮的转矩进行稳定补偿,使之达到合理的转矩分配,使车辆稳定行驶;Using the vehicle ideal attitude calculation unit (17), the ideal yaw rate and the center of mass sideslip angle for stable driving of the vehicle are calculated through the actual steering angle and actual vehicle speed of the electric vehicle. Data, the error controller (18) analyzes the data, implements a reasonable and safe steering angle adjustment to the vehicle through the steering mechanism (20), and reasonably adjusts the left front wheel, the right front wheel, and the left rear wheel through the torque distribution controller (19). The torque of the wheel and the right rear wheel is stably compensated to achieve a reasonable torque distribution and make the vehicle run stably;
误差控制器采用PI控制算法,PI控制算法根据理想横摆角速度、理想质心侧偏角与实际横摆角速度、实际质心侧偏角之间的偏差,实时纠正四轮电机驱动转矩,得到实现理想驾驶路径的横摆力矩和期望的前轮补偿角,使车辆能按照驾驶指令行驶。The error controller adopts the PI control algorithm. The PI control algorithm corrects the driving torque of the four-wheel motor in real time according to the deviation between the ideal yaw rate, the ideal center of mass slip angle and the actual yaw rate and the actual center of mass slip angle, and achieves the ideal The yaw moment of the driving path and the desired front wheel compensation angle allow the vehicle to follow the driving commands.
当路面条件不佳或者出现凹凸不平路面时,左前轮轮毂电机及控制系统(3)、右前轮轮毂电机及控制系统(4)、左后轮轮毂电机及控制系统(5)和右后轮轮毂电机及控制系统(6)开始自身调节,之后虚拟轮及虚拟轮电机控制系统再根据负载转矩的变化更新Δω*。When the road conditions are poor or the road surface is uneven, the left front wheel hub motor and control system (3), the right front wheel hub motor and control system (4), the left rear wheel hub motor and control system (5) and the right rear wheel hub motor and control system (5) The wheel hub motor and the control system (6) start to adjust themselves, and then the virtual wheel and the virtual wheel motor control system update Δω* according to the change of the load torque.
给定理想车辆速度,正常行驶直接将理想速度给到差速机构(1);当某一轮毂电机力矩变大,转矩经过加权平均单元(16)与虚拟轮电机(22)相连接,经过数值转化单元(23)与差速机构(1)连接,重新给定符合行驶工况的四轮车速,使车辆达到稳定状态。Given the ideal vehicle speed, the ideal speed is directly given to the differential mechanism (1) in normal driving; when the torque of a certain wheel hub motor becomes larger, the torque is connected with the virtual wheel motor (22) through the weighted average unit (16), The numerical value conversion unit (23) is connected with the differential mechanism (1), and re-sets the four-wheel vehicle speed in accordance with the driving condition, so that the vehicle reaches a stable state.
差速机构(1)通过整车质心速度与转向角度,分析出左前轮、右前轮、左后轮、右后轮的实时理想状态轮速,理想轮速方程如下:The differential mechanism (1) analyzes the real-time ideal wheel speeds of the left front wheel, right front wheel, left rear wheel, and right rear wheel through the center of mass velocity and steering angle of the vehicle. The ideal wheel speed equation is as follows:




V1、V2、V3、V4,分别为前内侧轮速度、前外侧轮速度、后外侧轮速度、后内侧轮速度,V为后轴中点速度,δin为内轮转角,δout为外轮转角,B为轮距,L为轴距。V1 , V2 , V3 , V4 are the speed of the front inner wheel, the front outer wheel speed, the rear outer wheel speed, and the rear inner wheel speed, respectively, V is the midpoint speed of the rear axle, δin is the inner wheel angle, δout is the outer wheel angle, B is the wheelbase, and L is the wheelbase.
虚拟轮电机可用如下关系式表示,The virtual wheel motor can be expressed by the following relation:

式中,i=1,2,3,4,分别代表四个轮毂电机;ωi为电机的转速;ui为转矩控制量即电磁转矩;Ji为等效的转动惯量;bi为摩擦因数;S为积分。In the formula, i=1, 2, 3, and 4, representing four in-wheel motors respectively; ωi is the speed of the motor; ui is the torque control amount, that is, the electromagnetic torque; Ji is the equivalent moment of inertia; bi is the friction factor; S is the integral.
转矩分配控制器可用如下关系式,The torque distribution controller can use the following relationship,

ΔFzbc=Fxfl-s+Fxfr-s+Fxrl-s+Fxrr-sΔFzbc =Fxfl-s +Fxfr-s +Fxrl-s +Fxrr-s
ΔN表示车辆的横摆力矩,ΔFzbc表示驾驶员期望的纵向驱动力,Fxfl-s、Fxfr-s、Fxrl-s、 Fxrr-s分别为左前轮、右前轮、左后轮、右后轮的轮胎纵向力目标值,Fyfl-s、Fyfr-s分别为左前轮、右前轮的轮胎侧向力目标值。lf表示质心至前轴的距离,Tf表示车轮转矩。左前轮和右前轮的轮胎侧向力与相应的地面摩擦圆大小成比例,即相应轮胎的路面摩擦圆越大,则其提供的轮胎侧向力相应的越大,即:ΔN represents the yaw moment of the vehicle, ΔFzbc represents the driver’s desired longitudinal driving force, Fxfl-s , Fxfr-s , Fxrl-s , and Fxrr-s are the left front wheel, the right front wheel, and the left rear, respectively Fyfl-s and Fyfr-s are the tire lateral force target values of the left front wheel and the right front wheel, respectively. lf is the distance from the center of mass to the front axle, and Tf is the wheel torque. The tire lateral force of the left front wheel and the right front wheel is proportional to the size of the corresponding ground friction circle, that is, the larger the road friction circle of the corresponding tire, the greater the tire lateral force provided by it, namely:

Fyfl-s、Fyfr-s分别为左前轮、右前轮的轮胎侧向力目标值,Fzfl、Fzfr分别为左前轮、右前轮的轮胎垂向载荷,μ为车轮与地面的摩擦系数。Fyfl-s and Fyfr-s are the tire lateral force target values of the left front wheel and the right front wheel, respectively, Fzfl and Fzfr are the tire vertical loads of the left front wheel and the right front wheel, respectively, μ is the wheel and the The coefficient of friction of the ground.
转矩检测单元即左前轮轮速检测单元(11)、右前轮轮速检测单元(12)、左后轮轮速检测单元(13)和右后轮轮速检测单元(14)实时获取车辆四个轮毂电机的转速并进行合理的转矩分配,车轮侧向力主要由转向轮提供,将前两个车轮的纵向力、侧向力和后两个车轮的纵向力6个参数作为分配目标,以四个轮胎产生的轮胎力占各自车轮的摩擦圆比重最小为最优目标,构造目标函数转矩分配最优目标函数关系式The torque detection unit, that is, the left front wheel speed detection unit (11), the right front wheel speed detection unit (12), the left rear wheel speed detection unit (13) and the right rear wheel speed detection unit (14) obtain the real-time acquisition The speed of the four in-wheel motors of the vehicle and the reasonable torque distribution, the lateral force of the wheel is mainly provided by the steering wheel, and the longitudinal force of the front two wheels, the lateral force and the longitudinal force of the rear two wheels are distributed as six parameters The objective is to take the smallest proportion of the tire force generated by the four tires in the friction circle of each wheel as the optimal objective, and construct the objective function torque distribution optimal objective function relational expression





其中,Js为目标约束函数,cxfl、cxfr、cxrl、cxrr分别为左前轮、右前轮、左后轮、右后轮的纵向力权重系数,cyfl、cyfr分别为左前轮、右前轮的侧向力权重系数,Fzfl、Fzfr、Fzrl、Fzrr分别为左前轮、右前轮、左后轮、右后轮的轮胎垂向载荷,
差速机构过车辆的实际车速v与转向角δ,采用Ackermann差速方法,分析得到右前轮、左前轮、右后轮、左后轮的理想轮速。The differential mechanism passes through the actual vehicle speed v and steering angle δ of the vehicle, and uses the Ackermann differential method to analyze and obtain the ideal wheel speeds of the right front wheel, left front wheel, right rear wheel and left rear wheel.
下面结合附图进行详细说明:A detailed description is given below in conjunction with the accompanying drawings:
如图一所示,四轮全驱电动汽车虚拟轮主动转矩分配控制系统,包括差速机构(1),通过电动汽车实际方向转角与实际车速计算出四个车轮的理想转速V1、 V2、V3、V4,左前轮轮速检测单元(11)、右前轮轮速检测单元(12)、左后轮轮速检测单元(13)、右后轮轮速检测单元(14)实时检测到四个车轮的轮速并反馈回差速机构(1),进而进行误差分析,给到左前轮轮毂电机及控制系统(3)、右前轮轮毂电机及控制系统(4)、左后轮轮毂电机及控制系统(5)、右后轮轮毂电机及控制系统(6)进行转矩给定,如遇到某一轮毂电机转矩过大,控制系统会将四个车轮的转矩通过加权平均单元(16),对转矩进行合理的加权平均,通过虚拟轮及虚拟轮电机控制系统(2)对四个车轮轮速进行重新给定,使车辆达到安全稳定状态。As shown in Figure 1, the virtual wheel active torque distribution control system of the four-wheel all-wheel drive electric vehicle includes a differential mechanism (1), and calculates the ideal rotational speed V1 , V of the four wheels through the actual steering angle of the electric vehicle and the actual vehicle speed2 ,V3 ,V4 , left front wheel wheel speed detection unit (11), right front wheel wheel speed detection unit (12), left rear wheel wheel speed detection unit (13), right rear wheel wheel speed detection unit (14) ) detects the wheel speeds of the four wheels in real time and feeds them back to the differential mechanism (1), and then conducts error analysis and sends them to the left front wheel hub motor and control system (3), right front wheel hub motor and control system (4) , the left rear wheel hub motor and control system (5), the right rear wheel hub motor and control system (6) for torque setting, if the torque of a hub motor is too large, the control system will The torque is reasonably weighted and averaged by the weighted averaging unit (16), and the wheel speeds of the four wheels are re-given through the virtual wheel and the virtual wheel motor control system (2), so that the vehicle reaches a safe and stable state.
如图1所示,包括车辆理想姿态计算单元(17),通过电动汽车实际方向转角与实际车速计算出车辆行驶稳定的理想横摆角速度与质心侧偏角,车辆在行驶过程中,通过整车模型(15)实时反馈数据,误差控制器(18)对数据进行分析,通过转向机构(20)对车辆实行合理安全转向角调整,通过转矩分配控制器(19) 合理的对左前轮、右前轮、左后轮、右后轮的转矩进行稳定补偿,使之达到合理的转矩分配,使车辆稳定行驶。As shown in Figure 1, it includes a vehicle ideal attitude calculation unit (17), which calculates the ideal yaw rate and the center of mass sideslip angle for the vehicle to run stably through the actual steering angle of the electric vehicle and the actual vehicle speed. The model (15) feeds back the data in real time, the error controller (18) analyzes the data, adjusts the steering angle of the vehicle reasonably and safely through the steering mechanism (20), and reasonably adjusts the left front wheel, The torque of the right front wheel, left rear wheel and right rear wheel is stably compensated to achieve a reasonable torque distribution and make the vehicle run stably.
如图2所示,设计虚拟轮电机控制器的控制作用要滞后于电机控制器的控制作用,所以当路面条件不佳或者出现凹凸不平路面时,异步轮毂电机直接转矩控制系统开始自身调节,之后主控制器再根据负载转矩的变化更新ωf。所以将转动惯量Jf整定成比较大的值,可以避免出现尖峰电流,保证逆变器在安全区域内工作。As shown in Figure 2, the control function of the virtual wheel motor controller is designed to lag behind the control function of the motor controller. Therefore, when the road conditions are poor or uneven road surfaces appear, the asynchronous wheel hub motor direct torque control system begins to adjust itself. Then the main controller updates ωf according to the change of load torque. Therefore, setting the moment of inertia Jf to a relatively large value can avoid peak current and ensure that the inverter works in a safe area.
如图3所示,四轮全驱电动汽车虚拟轮机器控制系统,给定理想车辆速度,正常行驶直接将理想速度给到差速机构(1);当某一轮毂电机力矩变大,转矩经过加权平均单元(16)与虚拟轮电机(22)相连接,经过数值转化单元(23)与差速机构(1)连接,重新给定符合行驶工况的四轮车速,使车辆达到稳定状态。As shown in Figure 3, the virtual wheel machine control system of the four-wheel all-wheel drive electric vehicle, given the ideal vehicle speed, the ideal speed is directly given to the differential mechanism (1) during normal driving; when the torque of a certain wheel motor becomes larger, the torque The weighted average unit (16) is connected to the virtual wheel motor (22), and the value conversion unit (23) is connected to the differential mechanism (1), and the four-wheel vehicle speed that conforms to the driving conditions is re-given, so that the vehicle reaches a stable state .
综上,基于以往存在的问题,本发明提出一种基于四轮全驱电动汽车虚拟轮的主动转矩分配的稳定性控制方法,主动转矩分配可以根据车辆行驶的路面状态、行驶工况来选择相应的转矩分配控制器,转矩分配控制器可以通过目标算法实现加权平均转矩以及转矩分配控制器合理补偿转矩,提高车辆转向性能,确保车辆时刻处于良好的稳定性区域运行。提高加速性能,保证车辆平稳驶过低附着或更复杂的路面条件的能力。提高主动安全性能,不会因车轮滑转而导致侧向附着力迅速下降而丧失方向稳定性和转向操纵能力、使主动安全性变差。因此,在满足驾驶员对驱动力需求的前提下,达到整车性能最佳,并通过转矩协调控制系统来丰富和完善主动安全系统具有重要的意义。To sum up, based on the existing problems in the past, the present invention proposes a stability control method based on active torque distribution of the virtual wheels of a four-wheel all-wheel drive electric vehicle. Select the corresponding torque distribution controller, the torque distribution controller can realize the weighted average torque through the target algorithm and the torque distribution controller can reasonably compensate the torque, improve the steering performance of the vehicle, and ensure that the vehicle runs in a good stability area at all times. Improves acceleration performance and ensures the vehicle's ability to drive smoothly over low adhesion or more complex road conditions. Improve the active safety performance, and will not lose the directional stability and steering control ability due to the rapid decline of lateral adhesion due to wheel slip, and make the active safety worse. Therefore, under the premise of satisfying the driver's demand for driving force, it is of great significance to achieve the best vehicle performance and to enrich and improve the active safety system through the torque coordination control system.
Claims (10)
Translated fromChinese












Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810952188.8ACN109291803B (en) | 2018-08-21 | 2018-08-21 | Stability control method based on four-wheel all-wheel-drive electric vehicle virtual wheel |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810952188.8ACN109291803B (en) | 2018-08-21 | 2018-08-21 | Stability control method based on four-wheel all-wheel-drive electric vehicle virtual wheel |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109291803A CN109291803A (en) | 2019-02-01 |
| CN109291803Btrue CN109291803B (en) | 2022-07-12 |
Family
ID=65165235
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810952188.8AActiveCN109291803B (en) | 2018-08-21 | 2018-08-21 | Stability control method based on four-wheel all-wheel-drive electric vehicle virtual wheel |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN109291803B (en) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110228375B (en)* | 2019-04-30 | 2023-03-21 | 南京航空航天大学 | Control method for in-situ steering of non-steering wheel of distributed driving vehicle |
| CN110154788B (en)* | 2019-04-30 | 2023-06-09 | 南京航空航天大学 | Control method for steering wheel-free side-direction departure of distributed driving vehicle |
| CN110588366A (en)* | 2019-09-10 | 2019-12-20 | 东风汽车集团有限公司 | Distributed time-sharing four-wheel drive electric vehicle chassis configuration of in-wheel motor, four-wheel drive electric vehicle and control method |
| CN110667402B (en)* | 2019-10-17 | 2023-04-07 | 清华大学苏州汽车研究院(吴江) | Electronic differential control method and system for four-wheel drive electric vehicle |
| CN110879621B (en)* | 2019-12-05 | 2022-11-29 | 成都圭目机器人有限公司 | Speed closed-loop control method applied to balance torque of four-wheel drive wheeled robot |
| CN110962626B (en)* | 2019-12-27 | 2022-07-22 | 吉林大学 | Self-adaptive electronic differential control method for multi-shaft hub motor driven vehicle |
| CN111152834B (en)* | 2020-01-10 | 2021-05-11 | 大连理工大学 | An electronic differential control method for electric vehicles based on Ackerman steering correction |
| CN111674256B (en)* | 2020-06-29 | 2024-05-10 | 徐州徐工港口机械有限公司 | Port transfer vehicle and running control method thereof |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0759124B2 (en)* | 1989-09-29 | 1995-06-21 | 東洋電機製造株式会社 | Electric vehicle control system |
| JP3747316B2 (en)* | 2001-11-16 | 2006-02-22 | 学校法人金沢工業大学 | Electric mobile vehicle steering / drive control method, electric mobile vehicle steering / drive control device, and electric mobile vehicle |
| JP3849979B2 (en)* | 2002-07-02 | 2006-11-22 | 本田技研工業株式会社 | Electric power steering device |
| CN1321016C (en)* | 2003-12-23 | 2007-06-13 | 上海燃料电池汽车动力系统有限公司 | Electric automobile feedback brake control method |
| JP4463287B2 (en)* | 2007-02-07 | 2010-05-19 | Nec東芝スペースシステム株式会社 | Posture change control method, posture change control system, posture change control program, and program recording medium |
| WO2011033592A1 (en)* | 2009-09-18 | 2011-03-24 | 本田技研工業株式会社 | Inverted pendulum-type moving body controller |
| CN101716952B (en)* | 2009-09-22 | 2012-05-23 | 浙江工业大学 | Electronic differential steering control system for realizing four-wheel steering by four-hub motor driving for electrical vehicle |
| WO2011065441A1 (en)* | 2009-11-25 | 2011-06-03 | シンフォニアテクノロジー株式会社 | Vibration damping device and vehicle provided therewith |
| CN102975631B (en)* | 2012-11-28 | 2017-10-10 | 沈阳工业大学 | The full drive electric automobile axle saturation compensation attitude control system of four-wheel and control method |
| CN203157759U (en)* | 2012-11-28 | 2013-08-28 | 沈阳工业大学 | Shaft saturation compensation attitude control system of four-wheel-drive electromobile |
| CN104554255A (en)* | 2013-10-22 | 2015-04-29 | 沈阳工业大学 | Dynamic decoupling method for active safety integrated control system of four-wheel drive electric automobile chassis |
| CN205220420U (en)* | 2015-11-09 | 2016-05-11 | 潍柴动力股份有限公司 | Pure electric vehicles actuating system |
| CN106208865B (en)* | 2016-08-10 | 2018-09-18 | 天津工业大学 | More permanent magnet synchronous motor Virtual-shaft control methods based on Load Torque Observer |
| CN106599470A (en)* | 2016-12-15 | 2017-04-26 | 武汉理工大学 | All-wheel steering analytical algorithm for large three-axle semitrailer |
| CN107139775A (en)* | 2017-04-26 | 2017-09-08 | 江苏大学 | A kind of electric car direct yaw moment control method based on Non-smooth surface technology |
| CN107499378B (en)* | 2017-07-12 | 2019-05-24 | 上海理工大学 | Four-wheel independent steering electric vehicle four-wheel steering-front/rear wheel turns to dynamic switching method |
| CN107499121A (en)* | 2017-09-13 | 2017-12-22 | 无锡商业职业技术学院 | Four-wheel drive electric automobile transmission system |
- 2018
- 2018-08-21CNCN201810952188.8Apatent/CN109291803B/enactiveActive
Also Published As
| Publication number | Publication date |
|---|---|
| CN109291803A (en) | 2019-02-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109291803B (en) | Stability control method based on four-wheel all-wheel-drive electric vehicle virtual wheel | |
| CN109606133B (en) | Distributed driving electric vehicle torque vector control method based on double-layer control | |
| CN105691381B (en) | A kind of four motorized wheels electric automobile stability control method and system | |
| CN111152834B (en) | An electronic differential control method for electric vehicles based on Ackerman steering correction | |
| CN104175902B (en) | The torque distribution control method of electric wheel truck wheel hub motor torque-split system | |
| CN105799503B (en) | Electric automobile chassis assembly with the driving of four-wheel wheel motor and four-wheel independent steering | |
| CN108859862B (en) | Self-adaptive drive control system of distributed drive cross-country vehicle | |
| CN109747434A (en) | Torque Vector Distribution Control Method for Distributed Drive Electric Vehicles | |
| CN108340967B (en) | Method for controlling yaw stability during steering of multi-wheel independent driving electric vehicle | |
| CN111152661A (en) | Failure control method for electric drive system of four-wheel distributed drive passenger car | |
| CN109398361B (en) | A handling stability control method for a four-wheel independent drive vehicle | |
| CN114408019B (en) | Distributed driving differential steering automobile longitudinal and transverse force coordination control method | |
| CN108422901A (en) | A kind of In-wheel-motor driving wheel of vehicle torque Multipurpose Optimal Method optimal based on vehicle comprehensive performance | |
| CN110605975A (en) | A multi-axis distributed electric drive vehicle torque distribution integrated controller and control method | |
| CN112590770B (en) | Steering stability control method for wheel hub motor driven vehicle | |
| CN110962626A (en) | Self-adaptive electronic differential control method for multi-shaft hub motor driven vehicle | |
| CN104554255A (en) | Dynamic decoupling method for active safety integrated control system of four-wheel drive electric automobile chassis | |
| CN110239363B (en) | Dynamic stabilizing system of electric automobile | |
| CN206537164U (en) | A kind of differential steering system | |
| CN102975631B (en) | The full drive electric automobile axle saturation compensation attitude control system of four-wheel and control method | |
| CN111267949A (en) | A skid steering control system for a vehicle | |
| CN112606707A (en) | Hydrogen fuel cell four-wheel hub motor driving plug-in controller and control method | |
| CN116118518A (en) | A distributed electric drive semi-trailer train lateral stability control method | |
| CN118618015B (en) | A fault-tolerant control method for distributed drive vehicles under wheel hub motor demagnetization fault | |
| CN113479184B (en) | Longitudinal and transverse cooperative control method for mechanical elastic electric wheel vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right | Effective date of registration:20240308 Address after:230000 B-2704, wo Yuan Garden, 81 Ganquan Road, Shushan District, Hefei, Anhui. Patentee after:HEFEI LONGZHI ELECTROMECHANICAL TECHNOLOGY Co.,Ltd. Country or region after:China Address before:110870 No. 111 Shenyang West Road, Shenyang economic and Technological Development Zone, Liaoning Patentee before:SHENYANG University OF TECHNOLOGY Country or region before:China | |
| TR01 | Transfer of patent right | ||
| TR01 | Transfer of patent right | Effective date of registration:20240418 Address after:Room 709, 7th Floor, Building 1, No. 10 Financial Avenue, Ningxi Street, Zengcheng District, Guangzhou City, Guangdong Province, 511300 Patentee after:Guangzhou Fuchuan Machinery Equipment Co.,Ltd. Country or region after:China Address before:230000 B-2704, wo Yuan Garden, 81 Ganquan Road, Shushan District, Hefei, Anhui. Patentee before:HEFEI LONGZHI ELECTROMECHANICAL TECHNOLOGY Co.,Ltd. Country or region before:China | |
| TR01 | Transfer of patent right |