CN109001757B - Parking space intelligent detection method based on 2D laser radar - Google Patents
Parking space intelligent detection method based on 2D laser radarDownload PDFInfo
- Publication number
- CN109001757B CN109001757BCN201810549473.5ACN201810549473ACN109001757BCN 109001757 BCN109001757 BCN 109001757BCN 201810549473 ACN201810549473 ACN 201810549473ACN 109001757 BCN109001757 BCN 109001757B
- Authority
- CN
- China
- Prior art keywords
- parking space
- point
- line segment
- distance
- boundary
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514detection methodMethods0.000titleclaimsabstractdescription31
- 238000000034methodMethods0.000claimsabstractdescription19
- 230000007613environmental effectEffects0.000claimsabstractdescription13
- 238000007781pre-processingMethods0.000claimsabstractdescription4
- 238000004364calculation methodMethods0.000claimsdescription7
- 230000002159abnormal effectEffects0.000claimsdescription3
- 230000007547defectEffects0.000claimsdescription2
- 238000001914filtrationMethods0.000claimsdescription2
- 238000005259measurementMethods0.000claimsdescription2
- 230000007246mechanismEffects0.000claimsdescription2
- 230000011218segmentationEffects0.000abstractdescription4
- 238000004422calculation algorithmMethods0.000description7
- 238000010586diagramMethods0.000description6
- 230000008901benefitEffects0.000description5
- 239000013598vectorSubstances0.000description5
- 238000000605extractionMethods0.000description3
- 238000011160researchMethods0.000description3
- 230000004927fusionEffects0.000description2
- 238000012986modificationMethods0.000description2
- 230000004048modificationEffects0.000description2
- 230000008569processEffects0.000description2
- 230000000007visual effectEffects0.000description2
- 230000003044adaptive effectEffects0.000description1
- 238000007621cluster analysisMethods0.000description1
- 230000000694effectsEffects0.000description1
- 230000006870functionEffects0.000description1
- 230000010365information processingEffects0.000description1
- 238000011835investigationMethods0.000description1
- 230000001788irregularEffects0.000description1
- 239000000463materialSubstances0.000description1
- 230000008447perceptionEffects0.000description1
- 238000002310reflectometryMethods0.000description1
- 230000009466transformationEffects0.000description1
- 238000000844transformationMethods0.000description1
- 239000002699waste materialSubstances0.000description1
Images





Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明属于自动泊车及辅助泊车的车位检测领域,尤其是车位检测中基于2D激光雷达的车位检测方法。The invention belongs to the field of parking space detection for automatic parking and assisted parking, in particular to a parking space detection method based on 2D laser radar in the parking space detection.
背景技术Background technique
车位检测是自动泊车和辅助泊车系统的必要组成部分,准确且有效的车位检测是实现自动泊车和辅助泊车的基础。现代车位检测往往依赖多种传感器的搭配,选取合适的传感器信息处理算法感知所处场景,进而做出相应的决策。对于自动泊车的车位检测,从传感器角度上看,主要有三种类型:利用超声波的车位检测、利用激光雷达的车位检测和利用摄像头等多传感器融合的车位检测。Parking space detection is an essential part of automatic parking and assisted parking systems. Accurate and effective parking space detection is the basis for automatic parking and assisted parking. Modern parking space detection often relies on the collocation of multiple sensors, selecting the appropriate sensor information processing algorithm to perceive the scene, and then make corresponding decisions. For the parking space detection of automatic parking, from the sensor point of view, there are mainly three types: parking space detection using ultrasonic waves, parking space detection using laser radar, and parking space detection using multi-sensor fusion such as cameras.
利用超声波雷达传感器进行泊车车位检测,需要车辆具有特定的初始姿态,并且只能对停靠规则的停车位进行检测,对规则车位的长度和宽度进行测量。如果遇到不规则和较狭窄的车位,则不会被系统检测到,造成车位资源的浪费。利用视觉传感器和超声波传感器对车位进行识别,需要视觉传感器、多个超声波传感器、脉冲传感器等多传感器信息进行融合,系统复杂,造价昂贵,且需要清晰的车位线和参照物。相比之下,激光雷达传感器同时具有测距和环境感知的功能,且探测角度大,数据稳定,适应性好已经被广泛用于自动驾驶、室内外定位及自动泊车工作。The use of ultrasonic radar sensors for parking space detection requires the vehicle to have a specific initial attitude, and can only detect parking spaces that park regularly, and measure the length and width of regular parking spaces. If there is an irregular and narrow parking space, it will not be detected by the system, resulting in a waste of parking space resources. Using visual sensors and ultrasonic sensors to identify parking spaces requires the fusion of multi-sensor information such as visual sensors, multiple ultrasonic sensors, and pulse sensors. The system is complex, expensive, and requires clear parking lines and reference objects. In contrast, lidar sensors have both ranging and environmental perception functions, and have a large detection angle, stable data, and good adaptability, and have been widely used in automatic driving, indoor and outdoor positioning, and automatic parking.
近几年来,很多人已经对使用激光雷达进行车位检测相关方面做了很多的相关研究,大多是用测量环境中的车位宽度信息的方法来获得车位大小。比如:2010年,上海交通大学的史晓磊等通过采用类似超声波传感器的方法,应用激光雷达对停车位进行检测。作者通过划分兴趣区域,对局部激光雷达数据进行分析,得到车位的深度信息,在通过跟踪车辆边界进行车位长度信息的测量,从而识别出停车位,并对垂直停车和平行停车分别设计了相应的停车位检测方法;2014年,同济大学的王宇辰等设计了基于激光雷达的车位动态检测方法,作者针对平行车位等停车环境,通过相应的坐标变换对障碍物数据点进行定位,并对车位识别过程中的车辆轮廓拟合不理想的情况,设计了一种基于最佳外接矩形的轮廓拟合方法来对车辆轮廓进行拟合,实现平行车位的动态检测。然而目前对于激光雷达的泊车车位检测的研究还停留在对规划规则和停靠规则的车位进行检测的基础上,检测方法参照超声波传感器的检测方法,未利用激光雷达传感器对于环境感知的功能,且针对不同的泊车车位类型需要人为选择切换检测模式,智能化程度不高。In recent years, many people have done a lot of related research on the use of lidar for parking space detection. Most of them use the method of measuring the width of the parking space in the environment to obtain the size of the parking space. For example, in 2010, Shi Xiaolei of Shanghai Jiaotong University and others used a method similar to ultrasonic sensors to use laser radar to detect parking spaces. The author divides the area of interest, analyzes the local lidar data, obtains the depth information of the parking space, and measures the length information of the parking space by tracking the vehicle boundary, thereby identifying the parking space, and designs corresponding parking spaces for vertical parking and parallel parking. Parking space detection method; in 2014, Wang Yuchen of Tongji University and others designed a dynamic detection method for parking spaces based on lidar. The author aimed at parking environments such as parallel parking spaces, and positioned obstacle data points through corresponding coordinate transformations, and analyzed the parking space recognition process. In the case of unsatisfactory vehicle contour fitting, a contour fitting method based on the best circumscribed rectangle is designed to fit the vehicle contour and realize the dynamic detection of parallel parking spaces. However, the current research on the detection of parking spaces with laser radar is still based on the detection of parking spaces with planning rules and parking rules. For different types of parking spaces, it is necessary to manually select and switch the detection mode, and the degree of intelligence is not high.
发明内容Contents of the invention
有鉴于此,为了解决上述问题,本发明提供一种基于2D激光雷达的车位智能检测方法,以解决现有技术中车位检测的准确性低和智能化水平不高的问题。In view of this, in order to solve the above problems, the present invention provides an intelligent detection method for parking spaces based on 2D laser radar to solve the problems of low accuracy and low level of intelligence in parking space detection in the prior art.
为实现上述目的及其他目的,本发明提供一种基于2D激光雷达的车位智能检测方法,该方法包括以下步骤:In order to achieve the above purpose and other purposes, the present invention provides a method for intelligent detection of parking spaces based on 2D laser radar, the method comprising the following steps:
步骤1.获取环境位置信息,包括距离信息和角度信息;
步骤2.对步骤1获取的环境位置信息进行预处理;
步骤3.对步骤2经预处理后的环境位置信息进行分割聚类;
步骤4.将步骤3得到聚类结果进行车辆边界线段提取;Step 4. Carry out the vehicle boundary line segment extraction with the clustering result obtained in
步骤5.将步骤4得到的车辆轮廓提取线段,并建立泊车车位空间模型并得到泊车车位最小宽度;Step 5. Extract the line segment from the vehicle profile obtained in step 4, and set up the parking space model and obtain the minimum width of the parking space;
步骤6.根据泊车车位的最小宽度判断车位大小是否满足要求。
优选地,所述环境位置信息进行分割聚类的具体方法如下:Preferably, the specific method for segmenting and clustering the environmental location information is as follows:
计算两点间的欧氏距离D:Compute the Euclidean distance D between two points:
|pn-pn-1|>Dmax|pn -pn-1 |>Dmax
其中,|pn-pn-1|为点pn到点pn-1之间的欧式距离,Dmax是任意相邻点间的距离阈值,如果点pn到点pn-1之间的欧式距离小于Dmax,则聚为一类,否则设为断点。Among them, |pn -pn-1 | is the Euclidean distance between point pn and point pn-1 , and Dmax is the distance threshold between any adjacent points. If the distance between point pn and point pn-1 If the Euclidean distance between them is less than Dmax , they will be clustered into one class, otherwise they will be set as breakpoints.
优选地,所述任意相邻点间的距离阈值Dmax的计算方法为:Preferably, the calculation method of the distance thresholdDmax between any adjacent points is:

其中,ln-1为点pn-1到激光雷达的距离,Δφ是激光雷达的分辨率,φn-1为点pn-1极坐标中的极角,λ为参数值。Among them, ln-1 is the distance from point pn-1 to the lidar, Δφ is the resolution of lidar, φn-1 is the polar angle in the polar coordinates of point pn-1 , and λ is the parameter value.
优选地,所述参数值λ具体计算方法如下:Preferably, the specific calculation method of the parameter value λ is as follows:
设点pn和pn-1连线与x轴夹角为β,则:Let the angle between the line connecting point pn and pn-1 and the x-axis be β, then:

其中,(xn,yn),(xn-1,yn-1)分别为数据点pn和pn-1的坐标,此时入射角γ为:Among them, (xn ,yn ), (xn-1 ,yn-1 ) are the coordinates of data points pn and pn-1 respectively, and the incident angle γ is:
γ=90°-(β-φn-1)γ=90°-(β-φn-1 )
若入射角γ>K,则对应较大的参数λ;如果入射角γ≤K,则对应较小的参数λ。If the incident angle γ>K, it corresponds to a larger parameter λ; if the incident angle γ≤K, then it corresponds to a smaller parameter λ.
优选地,所述步骤4包括以下子步骤:Preferably, said step 4 includes the following sub-steps:
步骤41.对数据点集进行分割获得断点并对断点进行初分配;Step 41. Segment the data point set to obtain breakpoints and initially assign the breakpoints;
步骤42.对所有已分割数据集进行异常数据集的剔除;Step 42. Excluding abnormal data sets for all divided data sets;
步骤43.计算边界点pj+1进行重分配,比较边界点pj+1与相邻线段的距离dj,通过判断距离dj是否满足给定阈值而对边界点进行再分配;Step 43. Calculate the boundary point pj+1 for redistribution, compare the distance dj between the boundary point pj+1 and the adjacent line segment, and redistribute the boundary point by judging whether the distance dj meets a given threshold;
步骤44.计算相邻集合{p(xi,yi)|i=c,c+1,…,m}和{p(xi,yi)|i=m+1,…,k}的拟合直线lc,m和lm+1,k的夹角

步骤45.将相邻集合{p(xi,yi)|i=c,c+1,…,m}和{p(xi,yi)|i=m+1,…,k},进行合并,应用最小二乘法拟合直线,计算拟合误差平方和E2,并与阈值
优选地,所述步骤5包括以下子步骤:Preferably, said step 5 includes the following sub-steps:
步骤51.计算车辆目标一的边界点

步骤52.提取车位的最小宽度D_Widemin;Step 52. Extract the minimum width D_Widemin of the parking space;
步骤53.计算车辆目标一的边界点



由于采用了上述技术方案,本发明具有如下的优点:Owing to adopting above-mentioned technical scheme, the present invention has following advantage:
本发明考虑到2D激光雷达拥有的角度和距离信息,通过聚类分析和线段拟合方法,建立泊车车位空间模型。并在此基础上将多输入多规则的模糊推理系统引入到车位检测中来,提高了泊车环境下,车位检测的准确性和智能化水平。The invention takes into account the angle and distance information possessed by the 2D laser radar, and establishes a parking space model through cluster analysis and line segment fitting methods. And on this basis, the multi-input and multi-rule fuzzy reasoning system is introduced into the parking space detection, which improves the accuracy and intelligence level of parking space detection in the parking environment.
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。Other advantages, objects and features of the present invention will be set forth in the following description to some extent, and to some extent, will be obvious to those skilled in the art based on the investigation and research below, or can be obtained from It is taught in the practice of the present invention. The objects and other advantages of the invention may be realized and attained by the following specification.
附图说明Description of drawings
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步的详细描述:In order to make the purpose of the present invention, technical solutions and advantages clearer, the present invention will be described in further detail below in conjunction with accompanying drawing:
图1为基于改进型的自适应阈值算法示意图;Fig. 1 is a schematic diagram based on an improved adaptive threshold algorithm;
图2为二次聚类示意图;Figure 2 is a schematic diagram of secondary clustering;
图3为线段提取算法流程图;Fig. 3 is a flow chart of the line segment extraction algorithm;
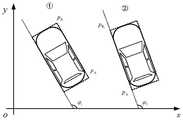
图4为泊车车位空间模型示意图;Fig. 4 is a schematic diagram of a parking space model;
图5为本发明方法的流程图;Fig. 5 is the flowchart of the inventive method;
图6为本实施例中不同的向量示意图。FIG. 6 is a schematic diagram of different vectors in this embodiment.
具体实施方式detailed description
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。Embodiments of the present invention are described below through specific examples, and those skilled in the art can easily understand other advantages and effects of the present invention from the content disclosed in this specification. The present invention can also be implemented or applied through other different specific implementation modes, and various modifications or changes can be made to the details in this specification based on different viewpoints and applications without departing from the spirit of the present invention.
请参阅图1至图6。需要说明的是,本实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。See Figures 1 through 6. It should be noted that the diagrams provided in this embodiment are only schematically illustrating the basic idea of the present invention, and only the components related to the present invention are shown in the diagrams rather than the number, shape and shape of the components in actual implementation. Dimensional drawing, the type, quantity and proportion of each component can be changed arbitrarily during actual implementation, and the component layout type may also be more complicated.
如图5所示,本实放例提供一种基于2D激光雷达的车位智能检测方法,该方法包括以下步骤:As shown in Figure 5, this example provides an intelligent detection method for parking spaces based on 2D laser radar, which includes the following steps:
步骤1:连接二维扫描型激光雷达传感器,获取环境数据并以数组形式存储于计算机中,获取的环境位置信息包括距离信息D={d1,d2,d3,...,dN}和角度信息S={a1,a2,a3,...,aN}。Step 1: Connect the two-dimensional scanning laser radar sensor to obtain environmental data and store them in the computer in the form of an array. The obtained environmental position information includes distance information D={d1 ,d2 ,d3 ,...,dN } and angle information S={a1 ,a2 ,a3 ,...,aN }.
步骤2:对步骤1获取的环境位置信息进行预处理,包括去除有效范围外的数据点、滤除孤立的噪声点及对激光雷达测量机制的缺陷补偿。Step 2: Preprocessing the environmental location information obtained in
步骤3:对步骤2得到的环境位置信息进行分割聚类分析,具体方法如下:Step 3: Carry out segmentation and clustering analysis on the environmental location information obtained in
采用欧氏距离作为聚类的依据,公式如下:Euclidean distance is used as the basis for clustering, and the formula is as follows:
|pn-pn-1|>Dmax|pn -pn-1 |>Dmax
其中,|pn-pn-1|为点pn到点pn-1之间的欧式距离,Dmax是任意相邻点间的距离阈值,如果点pn到点pn-1之间的欧式距离小于Dmax,则聚为一类,否则设为断点。其中Dmax还和激光雷达与点之间的距离ln-1有关。Dmax和ln-1的关系如下:Among them, |pn -pn-1 | is the Euclidean distance between point pn and point pn-1 , and Dmax is the distance threshold between any adjacent points. If the distance between point pn and point pn-1 If the Euclidean distance between them is less than Dmax , they will be clustered into one class, otherwise they will be set as breakpoints. Among them, Dmax is also related to the distance ln-1 between the lidar and the point. The relationship between Dmax and ln-1 is as follows:

其中,ln和ln-1分别是点pn和pn-1到激光雷达的距离,Δφ是激光雷达的分辨率,φn和φn-1分别为点pn和pn-1极坐标中的极角,λ为参数值,其大小直接影响着阈值的取值大小。Among them, ln and ln-1 are the distances from points pn and pn-1 to the lidar, Δφ is the resolution of the lidar, and φn and φn-1 are points pn and pn-1 respectively The polar angle in polar coordinates, λ is a parameter value, and its size directly affects the value of the threshold.
在聚类过程中,首先连接点pn和点pn-1,计算点pn-1的入射角γ,当入射角γ不断变大时,参数λ取较大值,距离阈值变大。当入射角γ不断变小时,参数λ取较小值,距离阈值变小。参数λ具体计算方法如下:In the clustering process, first connect the point pn and point pn-1 , and calculate the incident angle γ of the point pn-1 . When the incident angle γ becomes larger, the parameter λ takes a larger value, and the distance threshold becomes larger. When the incident angle γ keeps getting smaller, the parameter λ takes a smaller value, and the distance threshold becomes smaller. The specific calculation method of parameter λ is as follows:
设点pn和pn-1连线与x轴夹角为β,则:Let the angle between the line connecting point pn and pn-1 and the x-axis be β, then:

其中,(xn,yn),(xn-1,yn-1)分别为点pn和pn-1的坐标,此时入射角γ为:Among them, (xn ,yn ), (xn-1 ,yn-1 ) are the coordinates of points pn and pn-1 respectively, and the incident angle γ is:
γ=90°-(β-φn-1)γ=90°-(β-φn-1 )
若入射角γ>K,则对应较大的参数λ;如果入射角γ<=K,则对应较小的参数λ。由于扫描数据由于材料反射率原因,仍然存在部分数据缺失情况,需要根据车辆外轮廓特征进行二次聚类。If the incident angle γ>K, it corresponds to a larger parameter λ; if the incident angle γ<=K, then it corresponds to a smaller parameter λ. Due to the reflectivity of the material in the scan data, some data are still missing, and secondary clustering is required based on the vehicle outline features.
如图2所示,搜索相邻类簇①②间距离最近的两个点,设为mn-1和mn,计算两点间的距离Dn=|dn-dn-1|。若两点间的距离Dn恰好等于类簇①终点和类簇②起点,则根据车辆轮廓的连续性,将两个类簇重新聚为一类,即进行二次聚类。同时为了避免类簇间距过大,造成聚类失败的情况,需要设立距离阈值ξ,dn小于二次距离阈值ξ,即当|dn-dn-1|>ξ(dn),仍认为是两个类簇,不再进行二次聚类。As shown in Figure 2, search for the two closest points between adjacent clusters ①②, set mn-1 and mn , and calculate the distance Dn = |dn -dn-1 | between the two points. If the distance Dn between the two points is exactly equal to the end point of
步骤4:将步骤3得到聚类结果进行车辆边界线段提取。具体地,线段提取分为分割阶段和合并阶段两个。Step 4: Use the clustering results obtained in
①分割阶段①Segmentation stage
Step 1:根据IEPF算法原理,连接数据点集{p(xi,yi)|i=1,2,…,n}的起点p1和终点pn,此时遍历数据集{p(xi,yi)|i=1,2,…,n},找到距离最大点pm,若点pm到直线


确定断点pm分属哪个数据集。然后递归遍历整个数据集,直到所有数据点满足要求。f为预设的常数。Determine which dataset the breakpoint pm belongs to. Then recursively traverse the entire dataset until all data points meet the requirements. f is a preset constant.
Step 2:对所有已分割数据集进行异常数据集的剔除,包括重复数据集和只含有一个点的数据集。Step 2: Eliminate abnormal data sets for all split data sets, including duplicate data sets and data sets containing only one point.
Step 3:根据LT算法思想,将相邻数据点集{p(xi,yi)|i=k,…,j},{p(xi,yi)|i=j+1,…,q}的边界点pj+1进行重分配。判断点pj+1与数据点集{p(xi,yi)|i=k,…,j}所拟合直线的距离dj是否满足阈值范围内。若满足,则将点pj+1添加进数据点集{p(xi,yi)|i=k,…,j},并在{p(xi,yi)|i=j+1,…,q}中删除。如此遍历更新所有数据集。Step 3: According to the idea of LT algorithm, the adjacent data point set {p(xi ,yi )|i=k,…,j}, {p(xi ,yi )|i=j+1,… ,q} boundary point pj+1 for reallocation. Judging whether the distance dj between the point pj+1 and the straight line fitted by the data point set {p(xi ,yi )|i=k,...,j} meets the threshold range. If it is satisfied, then add point pj+1 into the data point set {p(xi ,yi )|i=k,...,j}, and in {p(xi ,yi )|i=
Step 4:重复步骤Step 3操作。Step 4:
②合并阶段②Merger stage
Step 1:首先计算相邻集合{p(xi,yi)|i=c,c+1,…,m}和{p(xi,yi)|i=m+1,…,k}的拟合直线lc,m和lm+1,k的夹角

Step 2:将相邻数据集合{p(xi,yi)|i=c,c+1,…,m}和{p(xi,yi)|i=m+1,…,k},进行合并,应用最小二乘法拟合直线,计算拟合误差平方和E2,并与阈值
步骤5:将步骤4得到的车辆轮廓提取线段,并建立泊车车位空间模型并得到泊车车位最小宽度。Step 5: Extract the line segment from the vehicle outline obtained in step 4, and establish a parking space model and obtain the minimum width of the parking space.
具体地,计算车辆目标一的边界点


对于泊车车位最小宽度D_Widemin,首先计算车辆目标一的边界点

根据向量计算法则有:According to the vector calculation rules are:

则:but:

令
车辆目标一的边界点


同理,可得车辆目标二的边界点


其中,m为

步骤6:根据泊车车位的最小宽度判断车位大小是否满足要求,当D_Widemin>D_car+Δd时,满足停车条件。Step 6: Determine whether the size of the parking space meets the requirements according to the minimum width of the parking space. When D_Widemin > D_car+Δd, the parking condition is met.
其中,Δd为车辆泊车所需多余车身的最小宽度,D_car表示车身宽度。最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的保护范围当中。Among them, Δd is the minimum width of the excess body required for parking the vehicle, and D_car represents the width of the body. Finally, it is noted that the above embodiments are only used to illustrate the technical solutions of the present invention without limitation. Although the present invention has been described in detail with reference to the preferred embodiments, those of ordinary skill in the art should understand that the technical solutions of the present invention can be carried out Modifications or equivalent replacements, without departing from the spirit and scope of the technical solution, should be included in the protection scope of the present invention.
Claims (2)
Translated fromChinese














Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810549473.5ACN109001757B (en) | 2018-05-31 | 2018-05-31 | Parking space intelligent detection method based on 2D laser radar |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810549473.5ACN109001757B (en) | 2018-05-31 | 2018-05-31 | Parking space intelligent detection method based on 2D laser radar |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109001757A CN109001757A (en) | 2018-12-14 |
| CN109001757Btrue CN109001757B (en) | 2022-12-20 |
Family
ID=64574051
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810549473.5AActiveCN109001757B (en) | 2018-05-31 | 2018-05-31 | Parking space intelligent detection method based on 2D laser radar |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN109001757B (en) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109591850A (en)* | 2018-12-24 | 2019-04-09 | 郑州畅想高科股份有限公司 | A kind of track foreign matter detecting method and device |
| CN110335282B (en)* | 2018-12-25 | 2023-04-18 | 广州启明星机器人有限公司 | Contour line segment feature extraction method based on grids |
| CN109799513B (en)* | 2019-01-04 | 2023-06-23 | 广西大学 | An Indoor Unknown Environment Localization Method Based on Straight Line Features in 2D LiDAR Data |
| CN110705385B (en)* | 2019-09-12 | 2022-05-03 | 深兰科技(上海)有限公司 | Method, device, equipment and medium for detecting angle of obstacle |
| CN111311925B (en)* | 2020-01-21 | 2022-02-11 | 阿波罗智能技术(北京)有限公司 | Parking space detection method and device, electronic device, vehicle, storage medium |
| KR20220022345A (en)* | 2020-08-18 | 2022-02-25 | 현대자동차주식회사 | System for extracting outline of static object and method thereof |
| CN112612281A (en)* | 2020-12-24 | 2021-04-06 | 奇瑞汽车股份有限公司 | Parking control method and device for automobile and computer storage medium |
| CN112776797A (en)* | 2021-02-27 | 2021-05-11 | 重庆长安汽车股份有限公司 | Original parking space parking establishment method and system, vehicle and storage medium |
| CN112799096B (en)* | 2021-04-08 | 2021-07-13 | 西南交通大学 | Map construction method based on low-cost vehicle-mounted 2D lidar |
| CN114999215A (en)* | 2022-05-27 | 2022-09-02 | 北京筑梦园科技有限公司 | Vehicle information acquisition method and device and parking management system |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103065519B (en)* | 2012-12-28 | 2015-04-01 | 苏州苏迪智能系统有限公司 | Detecting system of ramp fixed point stopping and starting and detecting method of ramp fixed point stopping and starting |
| CN103197323B (en)* | 2013-04-17 | 2014-11-26 | 清华大学 | Scanning data matching method and device for laser distance measuring machine |
| CN103600707B (en)* | 2013-11-06 | 2016-08-17 | 同济大学 | A kind of parking position detection device and method of Intelligent parking system |
| CN104880160B (en)* | 2015-05-27 | 2017-05-17 | 西安交通大学 | Two-dimensional-laser real-time detection method of workpiece surface profile |
| CN105701479B (en)* | 2016-02-26 | 2019-03-08 | 重庆邮电大学 | Multi-lidar fusion recognition method for intelligent vehicles based on target features |
| CN106952496B (en)* | 2017-04-11 | 2019-08-16 | 苏州梦伯乐信息科技有限公司 | Pilotless automobile intelligent car-searching position method |
| CN106997688B (en)* | 2017-06-08 | 2020-03-24 | 重庆大学 | Parking lot parking space detection method based on multi-sensor information fusion |
| CN107657812B (en)* | 2017-08-29 | 2021-10-29 | 耀灵人工智能(浙江)有限公司 | Method for dynamically planning parking space according to traffic flow prediction |
| CN107776570B (en)* | 2017-09-19 | 2020-09-01 | 广州汽车集团股份有限公司 | Full-automatic parking method and full-automatic parking system |
| CN207233218U (en)* | 2017-09-27 | 2018-04-13 | 重庆大学 | Parking lot empty parking space inspection device based on 2D laser radars |
- 2018
- 2018-05-31CNCN201810549473.5Apatent/CN109001757B/enactiveActive
Also Published As
| Publication number | Publication date |
|---|---|
| CN109001757A (en) | 2018-12-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109001757B (en) | Parking space intelligent detection method based on 2D laser radar | |
| CN111337941B (en) | A dynamic obstacle tracking method based on sparse lidar data | |
| Kang et al. | Automatic targetless camera–lidar calibration by aligning edge with gaussian mixture model | |
| CN109684921B (en) | A Road Boundary Detection and Tracking Method Based on 3D LiDAR | |
| Yuan et al. | Robust lane detection for complicated road environment based on normal map | |
| Zhang et al. | Weld line detection and tracking via spatial-temporal cascaded hidden Markov models and cross structured light | |
| CN110378376A (en) | A kind of oil filler object recognition and detection method based on machine vision | |
| CN115205391A (en) | Target prediction method based on three-dimensional laser radar and vision fusion | |
| CN115049700A (en) | Target detection method and device | |
| CN104063711B (en) | A kind of corridor end point fast algorithm of detecting based on K means methods | |
| CN108280840B (en) | Road real-time segmentation method based on three-dimensional laser radar | |
| CN108303096B (en) | Vision-assisted laser positioning system and method | |
| Dong et al. | A weld line detection robot based on structure light for automatic NDT | |
| CN109816051B (en) | Hazardous chemical cargo feature point matching method and system | |
| CN113420648B (en) | Target detection method and system with rotation adaptability | |
| CN109035207A (en) | The laser point cloud characteristic detection method of degree adaptive | |
| CN112348950A (en) | Topological map node generation method based on laser point cloud distribution characteristics | |
| CN116573017A (en) | Method, system, device and medium for sensing foreign objects in urban rail train running boundary | |
| CN118225096A (en) | Multi-sensor SLAM method based on dynamic feature point elimination and loop detection | |
| CN111160231A (en) | Automatic driving environment road extraction method based on Mask R-CNN | |
| Kukolj et al. | Road edge detection based on combined deep learning and spatial statistics of LiDAR data | |
| Fu et al. | Camera-based semantic enhanced vehicle segmentation for planar lidar | |
| CN118447471A (en) | Laser radar parking space identification method and device applied to complex scene | |
| Tang et al. | An effective way of constructing static map using 3-D LiDAR for autonomous navigation in outdoor environments | |
| Qing et al. | A novel particle filter implementation for a multiple-vehicle detection and tracking system using tail light segmentation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |