CN108416839B - A method and system for three-dimensional reconstruction of contour lines of multiple X-ray rotating images - Google Patents
A method and system for three-dimensional reconstruction of contour lines of multiple X-ray rotating imagesDownload PDFInfo
- Publication number
- CN108416839B CN108416839BCN201810189126.6ACN201810189126ACN108416839BCN 108416839 BCN108416839 BCN 108416839BCN 201810189126 ACN201810189126 ACN 201810189126ACN 108416839 BCN108416839 BCN 108416839B
- Authority
- CN
- China
- Prior art keywords
- contour
- target image
- dimensional matrix
- points
- different angles
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computer Graphics (AREA)
- Geometry (AREA)
- Software Systems (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Image Analysis (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本申请涉及数字图像识别技术领域,尤其涉及一种多幅X射线旋转图像轮廓线三维重建方法及其系统。The present application relates to the technical field of digital image recognition, and in particular, to a method and system for three-dimensional reconstruction of contour lines of multiple X-ray rotating images.
背景技术Background technique
电力设备X射线检测技术已经在成功应用在众多变电设备的无损检测,如GIS、干式变压器、电压电流互感器、合闸电阻、断路器、隔离开关、负荷开关等,该系统应用以来,已经发现了变电设备的多起重大缺陷,产生了很好的经济效益,此系统具有巨大的推广潜力。Power equipment X-ray inspection technology has been successfully applied in the non-destructive testing of many substation equipment, such as GIS, dry-type transformers, voltage and current transformers, closing resistors, circuit breakers, isolating switches, load switches, etc. Since the application of this system, A number of major defects of the substation equipment have been found, resulting in good economic benefits, and the system has great potential for promotion.
现有的电力设备X射线检测技术是首先通过对X射线图像进行数字图像处理,将图像中的背景和电力设备进行分割;然后运用边缘检测技术获得电力设备的二维平面坐标下的轮廓曲线,最后由专业技术人员通过观察设备轮廓线对设备的故障进行分析诊断。The existing X-ray detection technology of power equipment firstly divides the background and power equipment in the image by digital image processing on the X-ray image; Finally, professional technicians analyze and diagnose the fault of the equipment by observing the outline of the equipment.
但在实际工程中,由于大部分待检测工件具有外部结构不规则、内部结构复杂多样化及工件厚度不均的特性,使得直接通过图像处理得到的电力设备二维轮廓曲线包含的信息太少。技术人员仅凭借经验直接通过观察图像的二维轮廓对检测工件进行分析判断,容易出现误诊现象,使得检测效率低下。为了解决这个问题,提出一种多幅X射线旋转图像轮廓线三维重建方法及其系统。However, in practical engineering, because most of the workpieces to be tested have the characteristics of irregular external structure, complex and diverse internal structure and uneven thickness of the workpiece, the two-dimensional contour curve of the power equipment obtained directly through image processing contains too little information. Technicians only rely on experience to directly analyze and judge the detection workpiece by observing the two-dimensional contour of the image, which is prone to misdiagnosis and low detection efficiency. In order to solve this problem, a method and system for 3D reconstruction of contour lines of multiple X-ray rotating images are proposed.
发明内容SUMMARY OF THE INVENTION
本申请提供了一种多幅X射线旋转图像轮廓线三维重建方法及其系统,以解决现有技术中检测效率低下的问题。The present application provides a method and system for three-dimensional reconstruction of contour lines of multiple X-ray rotating images, so as to solve the problem of low detection efficiency in the prior art.
为了解决上述问题,本申请提供以下的技术方案:In order to solve the above-mentioned problems, the application provides the following technical solutions:
本申请提供了一种多幅X射线旋转图像轮廓线三维重建方法,包括:The present application provides a method for three-dimensional reconstruction of contour lines of multiple X-ray rotating images, including:
根据获取的目标图像轮廓线确定目标图像轮廓线对应的第一二维矩阵;Determine the first two-dimensional matrix corresponding to the contour line of the target image according to the obtained contour line of the target image;
运用正交优先的8邻域遍历追踪法将第一二维矩阵中的轮廓点进行顺序存储,获得第二二维矩阵;The contour points in the first two-dimensional matrix are sequentially stored by using the orthogonal priority 8-neighbor traversal tracking method to obtain the second two-dimensional matrix;
根据不同角度的目标图像轮廓线和不同角度的目标图像轮廓线对应的第二二维矩阵,获取不同角度的目标图像轮廓线的轮廓点坐标集合;According to the target image contour lines of different angles and the second two-dimensional matrix corresponding to the target image contour lines of different angles, obtain the set of contour point coordinates of the target image contour lines of different angles;
将轮廓点坐标集合中的对应点进行匹配获得目标图像的旋转图像对应点坐标;Matching the corresponding points in the set of contour point coordinates to obtain the corresponding point coordinates of the rotated image of the target image;
运用旋转图像点的坐标变换矩阵对旋转图像对应点坐标进行逆向求解,获得目标图像轮廓线对应轮廓点的三维坐标。Using the coordinate transformation matrix of the rotated image point to inversely solve the coordinates of the corresponding point of the rotated image, the three-dimensional coordinates of the contour point corresponding to the contour line of the target image are obtained.
可选地,运用正交优先的8邻域遍历追踪法将第一二维矩阵中的轮廓点进行顺序存储,获得第二二维矩阵,包括:Optionally, use the orthogonal priority 8-neighbor traversal tracking method to sequentially store the contour points in the first two-dimensional matrix to obtain a second two-dimensional matrix, including:
确定第一二维矩阵起始点O;Determine the starting point O of the first two-dimensional matrix;
按照第一二维矩阵
将获取的不同角度的轮廓线的轮廓点进行顺序存储,获得第二二维矩阵。The acquired contour points of contour lines at different angles are sequentially stored to obtain a second two-dimensional matrix.
可选地,根据不同角度的目标图像轮廓线和不同角度的目标图像轮廓线对应的第二二维矩阵,获取不同角度的目标图像轮廓线的轮廓点坐标集合,包括:Optionally, according to the target image contour lines of different angles and the second two-dimensional matrix corresponding to the target image contour lines of different angles, obtain the contour point coordinate sets of the target image contour lines of different angles, including:
根据第二二维矩阵获取不同角度的目标图像轮廓线的起始点和终点;Obtain the starting point and the ending point of the contour line of the target image at different angles according to the second two-dimensional matrix;
根据获取的不同角度的目标图像轮廓线的起始点和终点,获得不同角度的目标图像轮廓线的轮廓点坐标集合。According to the obtained starting points and ending points of the contour lines of the target image at different angles, a set of contour point coordinates of the contour lines of the target image at different angles is obtained.
可选地,将轮廓点坐标集合中的对应点进行匹配获得目标图像的旋转图像对应点坐标,包括:Optionally, matching the corresponding points in the set of contour point coordinates to obtain the coordinates of the corresponding points of the rotated image of the target image, including:
将轮廓点坐标集合纵向像素点个数进行计数,获得图像纵向像素点个数,找出一个最大值;Count the number of vertical pixels in the coordinate set of contour points, obtain the number of vertical pixels in the image, and find a maximum value;
根据目标图像轮廓线的走势顺次将轮廓点坐标集合中对应轮廓线上每一层纵向上的横向像素点个数进行计数,获得第三二维矩阵;According to the trend of the contour line of the target image, sequentially count the number of horizontal pixel points in the vertical direction of each layer on the contour point coordinate set corresponding to the contour line to obtain a third two-dimensional matrix;
获取第三二维矩阵每一行的最大值;Get the maximum value of each row of the third two-dimensional matrix;
根据最大值对不同角度的目标图像轮廓线同一纵坐标下的横坐标进行均分匹配,得到第四二维矩阵。According to the maximum value, the abscissas of the target image contour lines of different angles under the same ordinate are equally divided and matched to obtain a fourth two-dimensional matrix.
可选地,第三二维矩阵为记录不同图像同一轮廓线在同一纵坐标下像素点个数的矩阵;第四二维矩阵为记录不同图像同一轮廓线对应点匹配后的矩阵。Optionally, the third two-dimensional matrix is a matrix that records the number of pixels of the same contour line of different images under the same ordinate; the fourth two-dimensional matrix is a matrix that records the matching points of the same contour line of different images.
一种多幅X射线旋转图像轮廓线三维重建方法系统,包括:A method and system for three-dimensional reconstruction of contour lines of multiple X-ray rotating images, comprising:
第一获取模块,用于根据获取的目标图像轮廓线确定目标图像轮廓线对应的第一二维矩阵;a first acquisition module, configured to determine a first two-dimensional matrix corresponding to the target image contour line according to the acquired target image contour line;
第二获取模块,用于运用正交优先的8邻域遍历追踪法将第一获取模块获取的第一二维矩阵中的轮廓点进行顺序存储,获得第二二维矩阵;The second acquisition module is used to sequentially store the contour points in the first two-dimensional matrix acquired by the first acquisition module by using the orthogonal priority 8-neighbor traversal tracking method to obtain the second two-dimensional matrix;
第三获取模块,用于根据不同角度的目标图像轮廓线和不同角度的目标图像轮廓线对应的第二获取模块获取的第二二维矩阵,获取不同角度的目标图像轮廓线的轮廓点坐标集合;The third acquisition module is configured to acquire the set of contour point coordinates of the target image contour lines of different angles according to the second two-dimensional matrix acquired by the second acquisition module corresponding to the target image contour lines of different angles and the target image contour lines of different angles ;
匹配模块,用于将第三获取模块获取的轮廓点坐标集合中的对应点进行匹配,获取目标图像的旋转图像对应点坐标;a matching module, configured to match the corresponding points in the set of contour point coordinates obtained by the third obtaining module to obtain the coordinates of the corresponding points of the rotated image of the target image;
求解模块,用于运用旋转图像点的坐标变换矩阵对匹配模块获取的旋转图像对应点坐标进行逆向求解,获取目标图像轮廓线对应轮廓点的三维坐标。The solving module is used to reversely solve the coordinates of the corresponding points of the rotated image obtained by the matching module by using the coordinate transformation matrix of the rotated image points, and obtain the three-dimensional coordinates of the contour points corresponding to the contour lines of the target image.
可选地,第二获取模块包括:Optionally, the second obtaining module includes:
第一确定单元,用于确定第一获取模块获取的第一二维矩阵的起始点;a first determining unit for determining the starting point of the first two-dimensional matrix acquired by the first acquiring module;
搜寻单元,用于按照第一获取模块获取的第一二维矩阵中的编号顺序进行搜寻第一确定单元周围的轮廓点;a search unit, configured to search for contour points around the first determination unit according to the sequence of numbers in the first two-dimensional matrix acquired by the first acquisition module;
第一获取单元,用于将获取的不同角度的轮廓线的搜寻单元进行顺序存储获得第二二维矩阵。The first obtaining unit is configured to sequentially store the obtained search units of contour lines of different angles to obtain a second two-dimensional matrix.
可选地,第三获取模块包括:Optionally, the third obtaining module includes:
第二确定单元,用于根据第一获取单元获取不同角度的目标图像轮廓线的起始点和终点;a second determining unit, configured to acquire the starting point and the end point of the contour line of the target image at different angles according to the first acquiring unit;
第二获取单元,用于根据第二确定单元获得不同角度的目标图像轮廓线的轮廓点坐标集合。The second obtaining unit is configured to obtain, according to the second determining unit, a set of contour point coordinates of contour lines of the target image at different angles.
可选地,匹配模块包括:Optionally, the matching module includes:
第三确定单元,用于将第二获取单元的纵向像素点个数进行计数,获得图像纵向像素点个数,找出一个最大值;The third determination unit is used to count the number of vertical pixels of the second acquisition unit, obtain the number of vertical pixels of the image, and find a maximum value;
第三获取单元,用于根据目标图像轮廓线的走势顺次将第三确定单元对应的目标图像轮廓线上每一层纵向上的横向像素点个数进行计数,获得第三二维矩阵;The third acquiring unit is used to sequentially count the number of horizontal pixels in the longitudinal direction of each layer on the contour line of the target image corresponding to the third determining unit according to the trend of the contour line of the target image to obtain a third two-dimensional matrix;
第四获取单元,用于获取第三获取单元的每一行的最大值;a fourth acquisition unit, used for acquiring the maximum value of each row of the third acquisition unit;
匹配单元,用于根据第四获取单元的最大值对不同角度的目标图像轮廓线同一纵坐标下的横坐标进行均分匹配,得到第四二维矩阵。The matching unit is configured to equally divide and match the abscissas of the contour lines of the target images with different angles under the same ordinate according to the maximum value of the fourth obtaining unit, so as to obtain a fourth two-dimensional matrix.
由上述技术方案可知,本申请提供了一种多幅X射线旋转图像轮廓线三维重建方法及其系统,该方法的具体步骤为:首先,根据获取的目标图像轮廓线确定目标图像轮廓线对应的第一二维矩阵;其次,运用正交优先的8邻域遍历追踪法将第一二维矩阵中的轮廓点进行顺序存储,获得第二二维矩阵;再次,根据目标图像不同角度的轮廓曲线和目标图像不同角度的轮廓曲线对应的第二二维矩阵,获取目标图像不同角度的轮廓线的轮廓点坐标集合;然后,将不同角度轮廓曲线的轮廓点坐标集合中的对应点进行匹配获得目标图像的旋转图像对应点坐标;最后,运用旋转图像点的坐标变换矩阵对对应点坐标进行逆向求解,获得目标图像轮廓线对应轮廓点的三维坐标。本申请通过对X射线图像进行边缘检测后,运用正交优先的8邻域遍历追踪改进算法存储轮廓点,实现了目标轮廓线的顺序存储;同时运用像素点均分插值方法对多幅图像轮廓对应点进行匹配,得到轮廓线匹配矩阵,最后通过旋转图像坐标变化矩阵计算得到轮廓线的三维表达。本申请通过正交优先的8邻域遍历追踪改进算法和像素点均分插值方法,将图像的轮廓线从二维坐标表示转化为三维坐标表达,使得图像轮廓点的坐标信息更为全面,轮廓线更为清晰,减少了误诊现象的发生,进而提高了检测效率。It can be seen from the above technical solutions that the present application provides a method and a system for three-dimensional reconstruction of contour lines of multiple X-ray rotating images. The first two-dimensional matrix; secondly, the contour points in the first two-dimensional matrix are sequentially stored by using the orthogonal priority 8-neighbor traversal tracking method to obtain the second two-dimensional matrix; thirdly, according to the contour curves of different angles of the target image The second two-dimensional matrix corresponding to the contour curves of different angles of the target image, to obtain the contour point coordinate sets of the contour lines of the target image at different angles; then, the corresponding points in the contour point coordinate sets of the contour curves of different angles are matched to obtain the target image The rotated image of the image corresponds to the point coordinates; finally, the coordinate transformation matrix of the rotated image points is used to inversely solve the corresponding point coordinates to obtain the three-dimensional coordinates of the contour points corresponding to the contour lines of the target image. In this application, after the edge detection of the X-ray image is performed, the contour points are stored by using the orthogonal priority 8-neighbor traversal tracking algorithm to store the contour points, so as to realize the sequential storage of the target contour lines; The corresponding points are matched to obtain the contour line matching matrix, and finally the three-dimensional expression of the contour line is obtained by rotating the image coordinate change matrix. The present application transforms the contour of the image from two-dimensional coordinate representation to three-dimensional coordinate representation through the orthogonal priority 8-neighborhood traversal tracking improved algorithm and pixel point equalization interpolation method, so that the coordinate information of the image contour points is more comprehensive, and the outline The line is clearer, which reduces the occurrence of misdiagnosis and improves the detection efficiency.
附图说明Description of drawings
为了更清楚地说明本申请的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。In order to illustrate the technical solutions of the present application more clearly, the accompanying drawings that need to be used in the embodiments will be briefly introduced below. Other drawings can also be obtained from these drawings.
图1为本申请实施例提供的一种多幅X射线旋转图像轮廓线三维重建方法的流程示意图;1 is a schematic flowchart of a method for three-dimensional reconstruction of contour lines of multiple X-ray rotating images provided by an embodiment of the present application;
图2为本申请实施例提供的一种获取第二二维矩阵的流程示意图;2 is a schematic flowchart of obtaining a second two-dimensional matrix according to an embodiment of the present application;
图3为本申请实施例提供的一种获取不同角度的目标图像轮廓线的轮廓点坐标集合的流程示意图;3 is a schematic flowchart of obtaining a set of contour point coordinates of contour lines of a target image at different angles according to an embodiment of the present application;
图4为本申请实施例提供的一种对应点匹配的流程示意图;FIG. 4 is a schematic flowchart of a corresponding point matching provided in an embodiment of the present application;
图5为本申请实施例提供的一种多幅X射线旋转图像轮廓线三维重建方法系统的结构示意图。FIG. 5 is a schematic structural diagram of a system for a three-dimensional reconstruction method for contour lines of multiple X-ray rotating images according to an embodiment of the present application.
具体实施方式Detailed ways
图1,为本申请实施例提供的一种多幅X射线旋转图像轮廓线三维重建方法的流程示意图。由于现有的目标图像直接处理后人为可以识别,但计算机无法对其进行识别,使得人直接通过目标图像对设备进行判别容易出现误诊现象。为了减少这种误诊现象带来的检测效率低的问题,需要将目标图像先进行预处理,再处理后的目标图像轮廓线的三维坐标进行保存。这种对目标图像预处理并将目标图像轮廓线的三维坐标进行保存的方法为一种多幅X射线旋转图像轮廓线三维重建方法。该方法包括以下步骤:FIG. 1 is a schematic flowchart of a method for three-dimensional reconstruction of contour lines of multiple X-ray rotating images according to an embodiment of the present application. Since the existing target image can be recognized by humans after being directly processed, the computer cannot recognize it, which makes it easy to misdiagnose the device directly through the target image. In order to reduce the problem of low detection efficiency caused by this misdiagnosis phenomenon, it is necessary to preprocess the target image first, and then save the three-dimensional coordinates of the contour line of the processed target image. The method of preprocessing the target image and saving the three-dimensional coordinates of the contour of the target image is a three-dimensional reconstruction method of the contour of multiple X-ray rotated images. The method includes the following steps:
S101:根据获取的目标图像轮廓线确定目标图像轮廓线对应的第一二维矩阵。S101: Determine a first two-dimensional matrix corresponding to the target image contour line according to the acquired target image contour line.
首先,对目标图像进行二值化和图像形态学处理;其次,运用Canny算子检查图像轮廓,得到目标图像的轮廓线;最后,将目标图像的轮廓线保存在二维稀疏矩阵中。该二维稀疏矩阵为第一二维矩阵,该矩阵的行数和列数分别表示目标图像的长和宽,边缘点的值为1或255,非边缘点的值为0。First, the target image is binarized and image morphologically processed; second, the Canny operator is used to check the contour of the image to obtain the contour of the target image; finally, the contour of the target image is stored in a two-dimensional sparse matrix. The two-dimensional sparse matrix is a first two-dimensional matrix, the number of rows and columns of the matrix respectively represent the length and width of the target image, the value of edge points is 1 or 255, and the value of non-edge points is 0.
S102:运用正交优先的8邻域遍历追踪法将第一二维矩阵中的轮廓点进行顺序存储,获得第二二维矩阵。参见图2,为本申请实施例提供的一种获取第二二维矩阵的流程示意图。S102: Using the orthogonal priority 8-neighbor traversal tracking method, sequentially store the contour points in the first two-dimensional matrix to obtain a second two-dimensional matrix. Referring to FIG. 2 , it is a schematic flowchart of obtaining a second two-dimensional matrix according to an embodiment of the present application.
获取第二二维矩阵的具体过程如下:The specific process of obtaining the second two-dimensional matrix is as follows:
S1021:确定第一二维矩阵起始点O。S1021: Determine the starting point O of the first two-dimensional matrix.
S1022:按照第一二维矩阵
先顺次判断O周围8邻域中的1、2、3、4四个点是否存在轮廓点,存在则将该轮廓点在图中的位置坐标保存下来并将该点设为新的起始点O,并以O点为起始点重新开始寻找新的轮廓点。如果1、2、3、4位置中不存在轮廓点,则顺次判断8邻域中的5、6、7、8四个点是否存在轮廓点,存在则将该轮廓点在图中的位置坐标保存并将该点设为新的起始点,并以该点为起始点重新开始寻找新的轮廓点。如果O点周围8邻域中不存在轮廓点则结束本次搜索并开始新的搜索。First judge whether there are contour points in the 1, 2, 3, and 4 points in the 8 neighborhoods around O in turn. If there are contour points, save the position coordinates of the contour points in the figure and set this point as the new starting point. O, and start to find a new contour point with O point as the starting point. If there is no contour point in the positions 1, 2, 3, and 4, then judge whether there are contour points in the four points 5, 6, 7, and 8 in the 8 neighborhood in turn. The coordinates are saved and the point is set as the new starting point, and the search for a new contour point is restarted with this point as the starting point. If there are no contour points in the 8 neighborhoods around point O, end this search and start a new search.
S1023:将获取的不同角度的轮廓线的轮廓点进行顺序存储,获得第二二维矩阵。S1023: Store the acquired contour points of contour lines at different angles in sequence to obtain a second two-dimensional matrix.
对同一目标图像的不同角度的轮廓线进行依次寻找对应的轮廓点,并将对应的轮廓点按照顺序进行存储,获得保存有轮廓点坐标的第二二维矩阵。Corresponding contour points are sequentially searched for contour lines of different angles of the same target image, and the corresponding contour points are stored in order to obtain a second two-dimensional matrix storing the coordinates of the contour points.
传统的8邻域轮廓追踪法对这类曲线进行轮廓搜寻时会漏掉一些轮廓线上的点,当按照顺时针搜寻结束后需要重新掉头再去寻找遗失的点,依次连接存储的点无法得到轮廓线。这使得搜寻过程加长,增加了工作量,减少了工作效率。本申请中的正交优先8邻域轮廓追踪法能够严格按照轮廓线的趋势搜寻并保存轮廓点的坐标,并不会出现遗漏现象,依次连接存储的点可以得到完整的轮廓线,有效地提高了工作效率。The traditional 8-neighbor contour tracing method will miss some points on the contour when searching for such curves. When the clockwise search is completed, it is necessary to turn around again to find the lost points, and the points stored in sequence cannot be obtained. outline. This lengthens the search process, increases the workload and reduces work efficiency. The orthogonal priority 8-neighbor contour tracking method in this application can search and save the coordinates of contour points strictly according to the trend of contour lines, and there is no omission phenomenon. work efficiency.
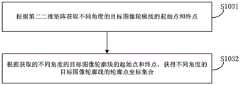
S103:根据不同角度的目标图像轮廓线和不同角度的目标图像轮廓线对应的第二二维矩阵,获取不同角度的目标图像轮廓线的轮廓点坐标集合。参见图3,为本申请实施例提供的一种获取不同角度的目标图像轮廓线的轮廓点坐标集合的流程示意图。S103: Acquire a set of contour point coordinates of the contour lines of the target image at different angles according to the contour lines of the target image at different angles and the second two-dimensional matrix corresponding to the contour lines of the target image at different angles. Referring to FIG. 3 , it is a schematic flowchart of obtaining a set of contour point coordinates of contour lines of a target image at different angles according to an embodiment of the present application.
获取不同角度的目标图像轮廓线的轮廓点坐标集合的具体过程如下:The specific process of obtaining the set of contour point coordinates of the contour lines of the target image at different angles is as follows:
S1031:根据第二二维矩阵获取不同角度的目标图像轮廓线的起始点和终点。S1031: Acquire starting points and ending points of contour lines of the target image at different angles according to the second two-dimensional matrix.
首先,在一幅图上选取一个目标图像轮廓线,并标记该轮廓线的起始点和终点;其次,选择起始点和终点之间的点,获得目标图像轮廓线的点坐标集合;最后,在不同角度的目标图像上选取表示同一目标图像轮廓线的起始点和终点。First, select a target image contour line on a picture, and mark the starting point and end point of the contour line; secondly, select the point between the starting point and the end point to obtain the point coordinate set of the target image contour line; finally, in the The starting point and the end point of the contour line of the same target image are selected on the target images of different angles.
S1032:根据获取的不同角度的目标图像轮廓线的起始点和终点,获得不同角度的目标图像轮廓线的轮廓点坐标集合。S1032: According to the obtained starting points and end points of the contour lines of the target image at different angles, obtain a set of contour point coordinates of the contour lines of the target image at different angles.
将获取的不同角度的目标图像轮廓线的起始点和终点坐标在第二二维矩阵中找到,选择起始点和终点之间的点,并将选中的点组成一个集合即得到选中的轮廓线的点坐标集合。Find the coordinates of the starting point and the ending point of the obtained target image contour line at different angles in the second two-dimensional matrix, select the point between the starting point and the ending point, and form a set of the selected points to obtain the selected contour line. A collection of point coordinates.
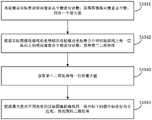
S104:将轮廓点坐标集合中的对应点进行匹配获得目标图像的旋转图像对应点坐标。参见图4,为本申请实施例提供的一种对应点匹配的流程示意图。S104: Match the corresponding points in the set of contour point coordinates to obtain the coordinates of the corresponding points of the rotated image of the target image. Referring to FIG. 4 , it is a schematic flowchart of a correspondence point matching provided in an embodiment of the present application.
对应点匹配的具体过程:The specific process of corresponding point matching:
S1041:将轮廓点坐标集合纵向像素点个数进行计数,获得图像纵向像素点个数,找出一个最大值。S1041: Count the number of vertical pixels in the coordinate set of contour points, obtain the number of vertical pixels in the image, and find a maximum value.
S1042:根据目标图像轮廓线的走势顺次将轮廓点坐标集合中对应轮廓线上每一层纵向上的横向像素点个数进行计数,获得第三二维矩阵。S1042: Count the number of horizontal pixel points in the vertical direction of each layer on the corresponding contour line in the contour point coordinate set in sequence according to the trend of the contour line of the target image, and obtain a third two-dimensional matrix.
第三二维矩阵记录了不同图像同一轮廓线在同一坐标下像素点的个数。The third two-dimensional matrix records the number of pixels at the same coordinates of the same contour line in different images.
S1043:获取第三二维矩阵每一行的最大值。S1043: Obtain the maximum value of each row of the third two-dimensional matrix.
S1044:根据最大值对不同角度的目标图像轮廓线同一纵坐标下的横坐标进行均分匹配,得到第四二维矩阵。S1044: Perform equal division matching on the abscissas under the same ordinate of the target image contour lines of different angles according to the maximum value, to obtain a fourth two-dimensional matrix.
第四二维矩阵记录了不同图像同一轮廓线对应点匹配后的矩阵。The fourth two-dimensional matrix records the matching matrix of the corresponding points of the same contour line in different images.
现有的对应点匹配方法可以对多幅旋转图像中的有限个点进行准确匹配,无法对多幅旋转图像中的对应线段进行准确匹配,使得以此结果构建的三维模型出现偏差。为了减少了这种偏差的出现,本申请中用像素均分插值轮廓点匹配方法,将不同角度的同一目标图像轮廓线的对应点进行匹配。这使得以此结果构建的三维模型出现偏差的几率减小,进一步提高了图像的识别度,进而提高了工作效率。Existing corresponding point matching methods can accurately match a limited number of points in multiple rotated images, but cannot accurately match corresponding line segments in multiple rotated images, which makes the 3D model constructed with this result biased. In order to reduce the occurrence of this kind of deviation, in the present application, the pixel average interpolation contour point matching method is used to match the corresponding points of the contour lines of the same target image at different angles. This reduces the probability of deviation of the 3D model constructed with this result, further improves the recognition of the image, and further improves the work efficiency.
S105:运用旋转图像点的坐标变换矩阵对旋转图像对应点坐标进行逆向求解,获得目标图像轮廓线对应轮廓点的三维坐标。S105: Use the coordinate transformation matrix of the rotated image point to reversely solve the coordinates of the corresponding point of the rotated image, and obtain the three-dimensional coordinates of the contour point corresponding to the contour line of the target image.
在不同图像上截取的一段目标图像的轮廓线,通过对轮廓线坐标的存储和轮廓线对应点匹配,得到轮廓线的匹配矩阵,再通过旋转图像坐标变化矩阵计算得到的轮廓线的三维表达。进而验证了轮廓线二维坐标存储和对应点匹配的正确性,减少了误诊现象的发生,提高了工作效率。The contour line of a segment of target image intercepted from different images is obtained by storing the coordinates of the contour line and matching the corresponding points of the contour line to obtain the matching matrix of the contour line, and then calculating the three-dimensional expression of the contour line by rotating the image coordinate change matrix. Furthermore, the correctness of the two-dimensional coordinate storage of the contour line and the matching of corresponding points are verified, the occurrence of misdiagnosis is reduced, and the work efficiency is improved.
从上述实施例可见,本申请实施例提供的一种多幅X射线旋转图像轮廓线三维重建方法。该方法的具体步骤:首先,根据获取的目标图像轮廓线确定目标图像轮廓线对应的第一二维矩阵;其次,运用正交优先的8邻域遍历追踪法将第一二维矩阵中的轮廓点进行顺序存储,获得第二二维矩阵;再次,根据不同角度的目标图像轮廓线和不同角度的目标图像轮廓线对应的所述第二二维矩阵,获取不同角度的目标图像轮廓线的轮廓点坐标集合;然后,将不同角度的目标图像轮廓线的轮廓点坐标集合中的对应点进行匹配获得目标图像的旋转图像对应点坐标;最后,运用旋转图像点的坐标变换矩阵对对应点坐标进行逆向求解,获得目标图像轮廓线对应轮廓点的三维坐标。本申请通过对X射线图像进行边缘检测后,运用正交优先的8邻域遍历追踪改进算法存储轮廓点,实现了目标轮廓线的顺序存储;同时运用像素点均分插值方法对多幅图像轮廓对应点进行匹配,得到轮廓线匹配矩阵,最后通过旋转图像坐标变化矩阵计算得到轮廓线的三维表达。本申请通过正交优先的8邻域遍历追踪改进算法和像素点均分插值方法,将图像的轮廓线从二维坐标表示转化为三维坐标表达,使得图像轮廓点的坐标信息更为全面,轮廓线更为清晰,减少了误诊现象的发生,进而提高了检测效率。It can be seen from the above embodiments that the embodiments of the present application provide a method for three-dimensional reconstruction of contour lines of multiple X-ray rotating images. The specific steps of the method: first, determine the first two-dimensional matrix corresponding to the target image contour line according to the obtained target image contour line; The points are sequentially stored to obtain a second two-dimensional matrix; again, according to the second two-dimensional matrix corresponding to the target image contour lines of different angles and the target image contour lines of different angles, the contours of the target image contour lines of different angles are obtained. point coordinate set; then, match the corresponding points in the contour point coordinate set of the contour line of the target image at different angles to obtain the corresponding point coordinates of the rotated image of the target image; finally, use the coordinate transformation matrix of the rotated image point to perform the corresponding point coordinates. Reverse solution to obtain the three-dimensional coordinates of the contour point corresponding to the contour line of the target image. In this application, after the edge detection of the X-ray image is performed, the contour points are stored by using the orthogonal priority 8-neighbor traversal tracking algorithm to store the contour points, so as to realize the sequential storage of the target contour lines; The corresponding points are matched to obtain the contour line matching matrix, and finally the three-dimensional expression of the contour line is obtained by rotating the image coordinate change matrix. The present application transforms the contour of the image from two-dimensional coordinate representation to three-dimensional coordinate representation through the orthogonal priority 8-neighborhood traversal tracking improved algorithm and pixel point equalization interpolation method, so that the coordinate information of the image contour points is more comprehensive, and the outline The line is clearer, which reduces the occurrence of misdiagnosis and improves the detection efficiency.
与本申请提供的一种多幅X射线旋转图像轮廓线三维重建方法相对应的,本申请还提供了一种多幅X射线旋转图像轮廓线三维重建方法系统,参见图5,为本申请实施例提供的一种多幅X射线旋转图像轮廓线三维重建方法系统的结构示意图。如图5所示,所述系统包括:第一获取模块、第二获取模块、第三获取模块、匹配模块和求解模块。第一获取模块,用于根据获取的目标图像轮廓线确定目标图像轮廓线对应的第一二维矩阵;第二获取模块,用于运用正交优先的8邻域遍历追踪法将第一获取模块获取的第一二维矩阵中的轮廓点进行顺序存储,获得第二二维矩阵;第三获取模块,用于根据不同角度的目标图像轮廓线和不同角度的目标图像轮廓线对应的第二获取模块获取的第二二维矩阵,获取不同角度的目标图像轮廓线的轮廓点坐标集合;匹配模块,用于将第三获取模块获取的轮廓点坐标集合中的对应点进行匹配,获取目标图像的旋转图像对应点坐标;求解模块,用于运用旋转图像点的坐标变换矩阵对匹配模块获取的旋转图像对应点坐标进行逆向求解,获取目标图像轮廓线对应轮廓点的三维坐标。Corresponding to a method for three-dimensional reconstruction of contour lines of multiple X-ray rotating images provided by the present application, the present application also provides a method and system for three-dimensional reconstruction of contour lines of multiple X-ray rotating images. The example provides a schematic structural diagram of a method and system for three-dimensional reconstruction of contour lines of multiple X-ray rotating images. As shown in FIG. 5 , the system includes: a first acquisition module, a second acquisition module, a third acquisition module, a matching module and a solving module. The first acquisition module is used for determining the first two-dimensional matrix corresponding to the target image contour line according to the acquired target image contour line; the second acquisition module is used for using the orthogonal priority 8 neighborhood traversal tracking method to The acquired contour points in the first two-dimensional matrix are sequentially stored to obtain the second two-dimensional matrix; the third acquisition module is used for the second acquisition according to the contour lines of the target image at different angles and the contour lines of the target image at different angles. The second two-dimensional matrix obtained by the module obtains the set of contour point coordinates of the contour lines of the target image at different angles; the matching module is used to match the corresponding points in the set of contour point coordinates obtained by the third obtaining module, and obtain the set of coordinates of the target image. The coordinates of the corresponding points of the rotated image; the solving module is used to reversely solve the coordinates of the corresponding points of the rotated image obtained by the matching module by using the coordinate transformation matrix of the rotated image points, and obtain the three-dimensional coordinates of the contour points corresponding to the contour lines of the target image.
第二获取模块包括:第一确定单元、搜寻单元和第一获取单元。第一确定单元,用于确定第一获取模块获取的第一二维矩阵的起始点;搜寻单元,用于按照第一获取模块获取的第一二维矩阵中的编号顺序进行搜寻第一确定单元周围的轮廓点;第一获取单元,用于将获取的不同角度的轮廓线的搜寻单元进行顺序存储获得第二二维矩阵。第一获取模块的输出端连接第一确定单元的输入端,第一确定单元的输出端连接搜寻单元的输入端,搜寻单元的输出端连接第一获取单元的输入端。使用过程:经过第一获取模块获取的信号进入第二获取模块的第一确定单元,第一确定单元中的信号经过输出端进入搜寻单元,从搜寻单元输出的信号达到第一获取单元。The second acquisition module includes: a first determination unit, a search unit and a first acquisition unit. a first determination unit for determining the starting point of the first two-dimensional matrix acquired by the first acquisition module; a search unit for searching the first determination unit according to the sequence of numbers in the first two-dimensional matrix acquired by the first acquisition module surrounding contour points; a first acquisition unit, configured to sequentially store the acquired search units of contour lines of different angles to obtain a second two-dimensional matrix. The output end of the first acquisition module is connected to the input end of the first determination unit, the output end of the first determination unit is connected to the input end of the search unit, and the output end of the search unit is connected to the input end of the first acquisition unit. Usage process: The signal acquired by the first acquisition module enters the first determination unit of the second acquisition module, the signal in the first determination unit enters the search unit through the output terminal, and the signal output from the search unit reaches the first acquisition unit.
第三获取模块包括:第二确定单元和第二获取单元。第二确定单元,用于根据第一获取单元获取不同角度的目标图像轮廓线的起始点和终点;第二获取单元,用于根据第二确定单元获得不同角度的目标图像轮廓线的轮廓点坐标集合。第二获取模块的第一获取单元的输出端连接第三获取模块的第二确定单元的输入端,第二确定单元的输出端连接第二获取单元的输入端。使用过程:第一获取单元输出的信号进入第三获取模块的第二确定单元,第二确定单元中的信号经过输出端进入第二获取单元。The third obtaining module includes: a second determining unit and a second obtaining unit. The second determining unit is used to obtain the starting point and the end point of the contour line of the target image at different angles according to the first obtaining unit; the second obtaining unit is used for obtaining the contour point coordinates of the contour line of the target image at different angles according to the second determining unit gather. The output end of the first obtaining unit of the second obtaining module is connected to the input end of the second determining unit of the third obtaining module, and the output end of the second determining unit is connected to the input end of the second obtaining unit. Using process: the signal output by the first acquisition unit enters the second determination unit of the third acquisition module, and the signal in the second determination unit enters the second acquisition unit through the output end.
匹配模块包括:第三确定单元、第三获取单元、第四获取单元和匹配单元。第三确定单元,用于将第二获取单元的纵向像素点个数进行计数,获得图像纵向像素点个数,找出一个最大值;第三获取单元,用于根据目标图像轮廓线的走势顺次将第三获取单元对应的目标图像轮廓线上每一层纵向上的横向像素点个数进行计数,获得第三二维矩阵;第四获取单元,用于获取第三获取单元的每一行的最大值;匹配单元,用于根据第四获取单元的最大值对不同角度的目标图像轮廓线同一纵坐标下的横坐标进行均分匹配,得到第四二维矩阵。第三获取模块的第二获取单元的输出端连接匹配模块的第三确定单元的输入端,第三确定单元的输出端连接第三获取单元的输入端,第三获取单元的输出端连接第四获取单元的输入端,第四获取单元的输出端连接匹配单元的输入端,匹配单元的输出端连接求解模块的输入端。使用过程:第二获取单元输出的信号进入匹配模块的第三确定单元,第三确定单元中的信号经过输出端进入第三获取单元,第三获取单元中的信号经过输出端进入第四获取单元,第四获取单元中的信号经输出端进入匹配单元,匹配单元中的信号经过输出端进入求解模块进行逆向求解得到目标图像轮廓线对应轮廓点的三维坐标。The matching module includes: a third determining unit, a third obtaining unit, a fourth obtaining unit and a matching unit. The third determination unit is used to count the number of vertical pixels of the second acquisition unit, to obtain the number of vertical pixels of the image, and to find a maximum value; the third acquisition unit is used to calculate the order according to the trend of the contour line of the target image. Count the number of horizontal pixels in the vertical direction of each layer on the contour line of the target image corresponding to the third acquisition unit to obtain a third two-dimensional matrix; the fourth acquisition unit is used to acquire the data of each row of the third acquisition unit The maximum value; the matching unit is configured to equally divide and match the abscissas under the same ordinate of the contour lines of the target image at different angles according to the maximum value of the fourth obtaining unit, to obtain a fourth two-dimensional matrix. The output of the second acquisition unit of the third acquisition module is connected to the input of the third determination unit of the matching module, the output of the third determination unit is connected to the input of the third acquisition unit, and the output of the third acquisition unit is connected to the fourth The input end of the obtaining unit, the output end of the fourth obtaining unit is connected to the input end of the matching unit, and the output end of the matching unit is connected to the input end of the solving module. Use process: the signal output by the second acquisition unit enters the third determination unit of the matching module, the signal in the third determination unit enters the third acquisition unit through the output terminal, and the signal in the third acquisition unit enters the fourth acquisition unit through the output terminal , the signal in the fourth acquisition unit enters the matching unit through the output terminal, and the signal in the matching unit enters the solving module through the output terminal for reverse solution to obtain the three-dimensional coordinates of the contour point corresponding to the contour line of the target image.
为了描述的方便,描述以上装置时以功能分为各种单元分别描述。当然,在实施本申请时可以把各单元的功能在同一个或多个软件和/或硬件中实现。For the convenience of description, when describing the above device, the functions are divided into various units and described respectively. Of course, when implementing the present application, the functions of each unit may be implemented in one or more software and/or hardware.
以上所描述的装置及系统实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性劳动的情况下,即可以理解并实施。The device and system embodiments described above are only illustrative, wherein the units described as separate components may or may not be physically separated, and the components displayed as units may or may not be physical units, that is, It can be located in one place, or it can be distributed over multiple network elements. Some or all of the modules may be selected according to actual needs to achieve the purpose of the solution in this embodiment. Those of ordinary skill in the art can understand and implement it without creative effort.
以上所述仅是本申请的具体实施方式,使本领域技术人员能够理解或实现本申请。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本申请的精神或范围的情况下,在其它实施例中实现。因此,本申请将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。The above descriptions are only specific embodiments of the present application, so that those skilled in the art can understand or implement the present application. Various modifications to these embodiments will be readily apparent to those skilled in the art, and the generic principles defined herein may be implemented in other embodiments without departing from the spirit or scope of the present application. Therefore, this application is not intended to be limited to the embodiments shown herein, but is to be accorded the widest scope consistent with the principles and novel features disclosed herein.
Claims (7)
Translated fromChinese
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810189126.6ACN108416839B (en) | 2018-03-08 | 2018-03-08 | A method and system for three-dimensional reconstruction of contour lines of multiple X-ray rotating images |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810189126.6ACN108416839B (en) | 2018-03-08 | 2018-03-08 | A method and system for three-dimensional reconstruction of contour lines of multiple X-ray rotating images |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108416839A CN108416839A (en) | 2018-08-17 |
| CN108416839Btrue CN108416839B (en) | 2022-04-08 |
Family
ID=63130348
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810189126.6AActiveCN108416839B (en) | 2018-03-08 | 2018-03-08 | A method and system for three-dimensional reconstruction of contour lines of multiple X-ray rotating images |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN108416839B (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112102469B (en)* | 2020-08-10 | 2023-07-25 | 上海联影医疗科技股份有限公司 | Three-dimensional modeling system, scanning system and control method thereof |
| CN112950535B (en)* | 2021-01-22 | 2024-03-22 | 北京达佳互联信息技术有限公司 | Video processing method, device, electronic equipment and storage medium |
| CN116012522B (en)* | 2022-11-03 | 2023-11-14 | 成都寻创信息技术有限公司 | Three-dimensional imaging system for head, neck, jaw and face soft tissues, bones and blood vessels |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101261685A (en)* | 2008-01-31 | 2008-09-10 | 浙江工业大学 | Garment sample automatic input device based on image vectorization technology |
| CN101301207A (en)* | 2008-05-28 | 2008-11-12 | 华中科技大学 | Angiographic 3D Reconstruction Method Guided by Dynamic Model |
| CN104021568A (en)* | 2014-06-25 | 2014-09-03 | 山东大学 | Automatic registering method of visible lights and infrared images based on polygon approximation of contour |
| CN104182757A (en)* | 2013-05-22 | 2014-12-03 | 内蒙古大学 | Method of acquiring actual coverage area of measured target and device |
| CN104680127A (en)* | 2014-12-18 | 2015-06-03 | 闻泰通讯股份有限公司 | Gesture identification method and gesture identification system |
| CN105916444A (en)* | 2013-11-04 | 2016-08-31 | 苏尔吉维索公司 | Method for reconstructing a 3d image from 2d x-ray images |
| CN107389705A (en)* | 2017-07-20 | 2017-11-24 | 云南电网有限责任公司电力科学研究院 | A kind of power equipment X ray Non-Destructive Testing three-D imaging method |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102004016586A1 (en)* | 2004-03-31 | 2005-11-03 | Siemens Ag | Image reconstruction device for an X-ray device and method for local 3D reconstruction of an object region |
- 2018
- 2018-03-08CNCN201810189126.6Apatent/CN108416839B/enactiveActive
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101261685A (en)* | 2008-01-31 | 2008-09-10 | 浙江工业大学 | Garment sample automatic input device based on image vectorization technology |
| CN101301207A (en)* | 2008-05-28 | 2008-11-12 | 华中科技大学 | Angiographic 3D Reconstruction Method Guided by Dynamic Model |
| CN104182757A (en)* | 2013-05-22 | 2014-12-03 | 内蒙古大学 | Method of acquiring actual coverage area of measured target and device |
| CN105916444A (en)* | 2013-11-04 | 2016-08-31 | 苏尔吉维索公司 | Method for reconstructing a 3d image from 2d x-ray images |
| CN104021568A (en)* | 2014-06-25 | 2014-09-03 | 山东大学 | Automatic registering method of visible lights and infrared images based on polygon approximation of contour |
| CN104680127A (en)* | 2014-12-18 | 2015-06-03 | 闻泰通讯股份有限公司 | Gesture identification method and gesture identification system |
| CN107389705A (en)* | 2017-07-20 | 2017-11-24 | 云南电网有限责任公司电力科学研究院 | A kind of power equipment X ray Non-Destructive Testing three-D imaging method |
Non-Patent Citations (2)
| Title |
|---|
| 3D Shape Reconstruction of Loop Objects in X-Ray Protein Crystallography;Tilo Strutz;《IEEE/ACM Transactions on Computational Biology and Bioinformatics》;20111231;第8卷(第3期);第797-807页* |
| 基于医学图像序列轮廓线重建三维表面的改进算法;张艳君,叶伯生,曾理湛;《计算机工程与应用》;20040531(第13期);第215-218页* |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108416839A (en) | 2018-08-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106289777B (en) | A kind of multi-state rolling bearing performance appraisal procedure based on geometry measurement | |
| US20210264585A1 (en) | Computer implemented process to enhance edge defect detection and other defects in ophthalmic lenses | |
| CN103235949B (en) | Image point of interest detection method and device | |
| CN108416839B (en) | A method and system for three-dimensional reconstruction of contour lines of multiple X-ray rotating images | |
| CN108230237A (en) | A kind of multispectral image reconstructing method for electrical equipment on-line checking | |
| CN108805180B (en) | Target object detection method and device | |
| CN115526892B (en) | Image defect duplicate removal detection method and device based on three-dimensional reconstruction | |
| CN115809982B (en) | Method, device and system for detecting cell crush injury | |
| CN111161348B (en) | Object pose estimation method, device and equipment based on monocular camera | |
| CN117011216A (en) | Defect detection method and device, electronic equipment and storage medium | |
| CN115564773B (en) | Small sample image defect detection method, device and equipment based on meta-learning | |
| CN117974438A (en) | Cableway surface image stitching method and device based on wavelet transformation and storage medium | |
| CN117237681A (en) | Image processing methods, devices and related equipment | |
| CN110414588A (en) | Picture labeling method and device, computer equipment and storage medium | |
| CN118400543B (en) | Foreign matter detection method and system for overhead transmission line based on image processing | |
| CN118392866B (en) | A method and system for automatic visual inspection of commutator appearance defects | |
| CN118691559A (en) | Photovoltaic equipment inspection method based on image analysis | |
| CN118823288A (en) | Device image acquisition method, device, computer equipment and readable storage medium | |
| CN110264488A (en) | A kind of bianry image edge extraction device | |
| CN110020624A (en) | image recognition method, terminal device and storage medium | |
| CN115393337A (en) | Industrial defect detection method, device, equipment and computer-readable storage medium | |
| CN104484869A (en) | Image matching method and system for ordinal measure features | |
| CN115456988A (en) | A defect detection method, terminal equipment and storage medium | |
| CN119644048B (en) | Distribution network fault identification positioning method, device, equipment, medium and product | |
| CN113743446B (en) | Model training data processing method, device, computer equipment and storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |