CN107895138B - Space obstacle detection method, device and computer-readable storage medium - Google Patents
Space obstacle detection method, device and computer-readable storage mediumDownload PDFInfo
- Publication number
- CN107895138B CN107895138BCN201710958038.3ACN201710958038ACN107895138BCN 107895138 BCN107895138 BCN 107895138BCN 201710958038 ACN201710958038 ACN 201710958038ACN 107895138 BCN107895138 BCN 107895138B
- Authority
- CN
- China
- Prior art keywords
- space
- obstacle
- graphic code
- preset
- obstacle detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/10—Terrestrial scenes
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K7/00—Methods or arrangements for sensing record carriers, e.g. for reading patterns
- G06K7/10—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation
- G06K7/14—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation using light without selection of wavelength, e.g. sensing reflected white light
- G06K7/1404—Methods for optical code recognition
- G06K7/1408—Methods for optical code recognition the method being specifically adapted for the type of code
- G06K7/1417—2D bar codes
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Health & Medical Sciences (AREA)
- Electromagnetism (AREA)
- General Health & Medical Sciences (AREA)
- Toxicology (AREA)
- Artificial Intelligence (AREA)
- Alarm Systems (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及空间障碍物检测领域,尤其涉及空间障碍物检测方法、装置及计算机可读存储介质。The present invention relates to the field of space obstacle detection, and in particular, to a space obstacle detection method, device and computer-readable storage medium.
背景技术Background technique
现有空间障碍物检测方法主要是基于图像视觉识别技术、激光传感器检测技术;其中,图像视觉识别技术对于算法、硬件配置要求较高;激光传感器检测技术同样需要配置激光发射及检测设备,导致成本较高,同时设备部署也不方便,尤其不适用于有人参与的场所。Existing space obstacle detection methods are mainly based on image visual recognition technology and laser sensor detection technology; among them, image visual recognition technology has higher requirements on algorithm and hardware configuration; laser sensor detection technology also needs to configure laser emission and detection equipment, resulting in cost It is relatively high, and equipment deployment is inconvenient, especially not suitable for places where people are involved.
上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。The above content is only used to assist the understanding of the technical solutions of the present invention, and does not mean that the above content is the prior art.
发明内容SUMMARY OF THE INVENTION
本发明的主要目的在于提供一种空间障碍物检测方法、装置及计算机可读存储介质,旨在解决现有空间障碍物检测方法对于算法、硬件配置要求高、检测设备部署不方便的技术问题。The main purpose of the present invention is to provide a space obstacle detection method, device and computer-readable storage medium, which aims to solve the technical problems that the existing space obstacle detection method has high requirements for algorithms and hardware configuration, and is inconvenient to deploy detection equipment.
为实现上述目的,本发明提供一种空间障碍物检测方法,在空间内的预设位置区域放置图形码,并设置用于识别所述图形码的摄像装置,所述空间障碍物检测方法包括以下步骤:In order to achieve the above purpose, the present invention provides a space obstacle detection method, which includes placing a graphic code in a preset position area in the space, and setting a camera device for identifying the graphic code. The spatial obstacle detection method includes the following: step:
步骤S10,启动摄像装置进行检测,确认是否识别到所述空间任一预设位置区域对应放置的图形码;Step S10, start the camera to detect, and confirm whether the graphic code placed corresponding to any preset position area of the space is recognized;
步骤S20,若无法识别所述图形码,则判定所述预设位置区域为异常区域;Step S20, if the graphic code cannot be identified, it is determined that the preset location area is an abnormal area;
步骤S30,统计所述空间内各异常区域的分布情况;Step S30, statistics the distribution of each abnormal area in the space;
步骤S40,当各所述异常区域的分布情况符合预设障碍物存在判定条件时,判定所述摄像装置与所述图形码之间存在障碍物。Step S40, when the distribution of each of the abnormal areas meets a preset obstacle existence determination condition, it is determined that there is an obstacle between the camera and the graphic code.
优选地,所述判定所述摄像装置与所述图形码之间存在障碍物的步骤之后,还包括:Preferably, after the step of determining that there is an obstacle between the camera and the graphic code, the method further includes:
步骤S50,根据已统计的所述空间内各异常区域的分布情况,确定所述障碍物的空间位置;Step S50, determining the spatial position of the obstacle according to the statistical distribution of each abnormal area in the space;
步骤S60,按照预设检测周期,重复执行预设检测次数的步骤S10-S40的操作,以更新统计所述空间内各异常区域的分布情况;Step S60, repeating the operations of steps S10-S40 for a preset number of detections according to a preset detection period, to update statistics on the distribution of each abnormal area in the space;
步骤S70,比对所述空间内各异常区域的新旧分布情况,得到所述空间内各异常区域的分布变化情况,并确定所述障碍物在所述空间内的位置变化情况。Step S70: Compare the new and old distributions of each abnormal area in the space, obtain the distribution change of each abnormal area in the space, and determine the position change of the obstacle in the space.
优选地,所述确定所述障碍物在所述空间内的位置变化情况的步骤之后,还包括:Preferably, after the step of determining the position change of the obstacle in the space, the method further includes:
步骤S80,判定所述障碍物的位置变化情况是否符合预设障碍物报警条件;Step S80, determining whether the position change of the obstacle meets the preset obstacle alarm condition;
步骤S90,若是,则向目标管理端发送障碍物报警信号。Step S90, if yes, send an obstacle alarm signal to the target management terminal.
优选地,所述判定所述摄像装置与所述图形码之间存在障碍物的步骤之后,还包括:Preferably, after the step of determining that there is an obstacle between the camera and the graphic code, the method further includes:
步骤S100,向目标管理端发送障碍物提示信号;Step S100, sending an obstacle prompt signal to the target management terminal;
步骤S110,向预设联动执行装置发送联动执行控制指令,以控制所述预设联动执行装置执行对应的控制动作。Step S110 , sending a linkage execution control instruction to a preset linkage execution device to control the preset linkage execution device to perform a corresponding control action.
优选地,所述目标管理端包括嵌入式物联网装置和/或云服务平台、和/或移动设备端。Preferably, the target management terminal includes an embedded IoT device and/or a cloud service platform, and/or a mobile device terminal.
优选地,所述图形码中嵌入对应的所述预设位置区域的位置信息。Preferably, the position information of the corresponding preset position area is embedded in the graphic code.
此外,为实现上述目的,本发明还提供一种空间障碍物检测装置,所述空间障碍物检测装置包括:摄像装置、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的空间障碍物检测程序,其中:In addition, in order to achieve the above object, the present invention also provides a space obstacle detection device, the space obstacle detection device includes: a camera, a memory, a processor, and a device stored in the memory and available on the processor Running a space obstacle detection program where:
所述摄像装置,用于获取图形码的数字图像,并识别所述图形码;The camera device is used to obtain a digital image of a graphic code and identify the graphic code;
所述空间障碍物检测程序被所述处理器执行时实现如上所述的空间障碍物检测方法的步骤。When the spatial obstacle detection program is executed by the processor, the steps of the above-described spatial obstacle detection method are implemented.
此外,为实现上述目的,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有空间障碍物检测程序,所述空间障碍物检测程序被处理器执行时实现如上所述的空间障碍物检测方法的步骤。In addition, in order to achieve the above object, the present invention also provides a computer-readable storage medium, where a space obstacle detection program is stored on the computer-readable storage medium, and the space obstacle detection program is executed by a processor to achieve the above The steps of the space obstacle detection method described above.
本发明实施例提出的一种空间障碍物检测方法、装置及计算机可读存储介质,在摄像装置无法识别空间任一预设位置区域对应放置的图形码时,判定所述预设位置区域为异常区域,并在各所述异常区域的分布情况符合预设空间障碍物存在判定条件时,判定所述摄像装置与所述图形码之间存在障碍物。从而在对算法、硬件配置要求不高、检测设备部署较方便的条件下,实现了对空间障碍物的检测,所述空间障碍物检测方法具有可靠、精准以及快速便于响应的特点。In the method, device and computer-readable storage medium for detecting a space obstacle proposed by the embodiments of the present invention, when the camera device cannot identify the graphic code placed corresponding to any preset position area in the space, it is determined that the preset position area is abnormal area, and when the distribution of each of the abnormal areas conforms to a preset spatial obstacle existence determination condition, it is determined that there is an obstacle between the camera device and the graphic code. Therefore, the detection of space obstacles is realized under the condition that the algorithm and hardware configuration are not high, and the detection equipment is more convenient to deploy.
附图说明Description of drawings
图1是本发明实施例方案涉及的空间障碍物检测装置结构示意图;1 is a schematic structural diagram of a space obstacle detection device involved in an embodiment of the present invention;
图2为本发明一种数据嵌入方法第一实施例的流程示意图;FIG. 2 is a schematic flowchart of a first embodiment of a data embedding method according to the present invention;
图3为本发明一种数据嵌入方法第二实施例的流程示意图;3 is a schematic flowchart of a second embodiment of a data embedding method according to the present invention;
图4为本发明一种数据嵌入方法第二实施例的细化步骤示意图;4 is a schematic diagram of refinement steps of a second embodiment of a data embedding method according to the present invention;
图5为本发明一种数据嵌入方法第三实施例的流程示意图。FIG. 5 is a schematic flowchart of a third embodiment of a data embedding method according to the present invention.
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。The realization, functional characteristics and advantages of the present invention will be further described with reference to the accompanying drawings in conjunction with the embodiments.
具体实施方式Detailed ways
应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
本发明实施例的主要解决方案是:在空间内的预设位置区域放置图形码,并设置用于识别所述图形码的摄像装置,所述空间障碍物检测方法包括以下步骤:启动摄像装置进行检测,确认是否识别到所述空间任一预设位置区域对应放置的图形码;若无法识别所述图形码,则判定所述预设位置区域为异常区域;统计所述空间内各异常区域的分布情况;当各所述异常区域的分布情况符合预设障碍物存在判定条件时,判定所述摄像装置与所述图形码之间存在障碍物。The main solution of the embodiment of the present invention is: placing a graphic code in a preset position area in the space, and setting a camera device for identifying the graphic code, the spatial obstacle detection method includes the following steps: starting the camera device to perform Detect and confirm whether the graphic code placed corresponding to any preset position area in the space is recognized; if the graphic code cannot be recognized, determine that the preset position area is an abnormal area; count the number of abnormal areas in the space. Distribution situation: when the distribution situation of each of the abnormal areas meets the preset obstacle existence determination condition, it is determined that there is an obstacle between the camera device and the graphic code.
由于现有空间障碍物检测方法对于算法、硬件配置要求高、检测设备部署不方便,本发明提供一种解决方案,以使得空间障碍物检测方法对算法、硬件配置要求较低、检测设备部署方便。Since the existing space obstacle detection method has high requirements on algorithm and hardware configuration, and the deployment of detection equipment is inconvenient, the present invention provides a solution, so that the spatial obstacle detection method has lower requirements on algorithm and hardware configuration, and the deployment of detection equipment is convenient .
如图1所示,图1是本发明实施例方案涉及的空间障碍物检测装置结构示意图。As shown in FIG. 1 , FIG. 1 is a schematic structural diagram of a space obstacle detection device involved in an embodiment of the present invention.
本发明实施例装置可以是PC,也可以是智能手机、平板电脑、便携计算机等具有显示功能的可移动式终端设备。The apparatus in the embodiment of the present invention may be a PC, or may be a mobile terminal device with a display function, such as a smart phone, a tablet computer, and a portable computer.
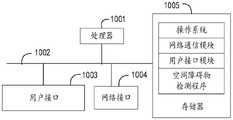
如图1所示,该装置可以包括:处理器1001,例如CPU,网络接口1004,用户接口1003,存储器1005,通信总线1002。其中,通信总线1002用于实现这些组件之间的连接通信。用户接口1003可以包括显示屏(Display)、输入单元比如键盘(Keyboard),可选用户接口1003还可以包括标准的有线接口、无线接口。网络接口1004可选的可以包括标准的有线接口、无线接口(如WI-FI接口)。存储器1005可以是高速RAM存储器,也可以是稳定的存储器(non-volatile memory),例如磁盘存储器。存储器1005可选的还可以是独立于前述处理器1001的存储装置。As shown in FIG. 1 , the apparatus may include: a
可选地,终端还可以包括摄像装置、RF(Radio Frequency,射频)电路,传感器、音频电路、WiFi模块等等。其中,传感器比如光传感器、运动传感器以及其他传感器。具体地,光传感器可包括环境光传感器及接近传感器,其中,环境光传感器可根据环境光线的明暗来调节显示屏的亮度,接近传感器可在移动终端移动到耳边时,关闭显示屏和/或背光。当然,移动终端还可配置陀螺仪、气压计、湿度计、温度计、红外线传感器等其他传感器,在此不再赘述。Optionally, the terminal may further include a camera, an RF (Radio Frequency, radio frequency) circuit, a sensor, an audio circuit, a WiFi module, and the like. Among them, sensors such as light sensors, motion sensors and other sensors. Specifically, the light sensor may include an ambient light sensor and a proximity sensor, wherein the ambient light sensor may adjust the brightness of the display screen according to the brightness of the ambient light, and the proximity sensor may turn off the display screen and/or turn off the display screen when the mobile terminal is moved to the ear. Backlight. Of course, the mobile terminal may also be configured with other sensors such as a gyroscope, a barometer, a hygrometer, a thermometer, and an infrared sensor, which will not be repeated here.
本领域技术人员可以理解,图1中示出的装置结构并不构成对装置的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置。Those skilled in the art can understand that the device structure shown in FIG. 1 does not constitute a limitation to the device, and may include more or less components than the one shown, or combine some components, or arrange different components.
如图1所示,作为一种计算机存储介质的存储器1005中可以包括操作系统、网络通信模块、用户接口模块以及空间障碍物检测程序。As shown in FIG. 1 , the
在图1所示的终端中,网络接口1004主要用于连接后台服务器,与后台服务器进行数据通信;用户接口1003主要用于连接客户端(用户端),与客户端进行数据通信;而处理器1001可以用于调用存储器1005中存储的空间障碍物检测程序,并执行以下操作:In the terminal shown in FIG. 1 , the
步骤S10,启动摄像装置进行检测,确认是否识别到所述空间任一预设位置区域对应放置的图形码;Step S10, start the camera to detect, and confirm whether the graphic code placed corresponding to any preset position area of the space is recognized;
步骤S20,若无法识别所述图形码,则判定所述预设位置区域为异常区域;Step S20, if the graphic code cannot be identified, it is determined that the preset location area is an abnormal area;
步骤S30,统计所述空间内各异常区域的分布情况;Step S30, statistics the distribution of each abnormal area in the space;
步骤S40,当各所述异常区域的分布情况符合预设障碍物存在判定条件时,判定所述摄像装置与所述图形码之间存在障碍物。Step S40, when the distribution of each of the abnormal areas meets a preset obstacle existence determination condition, it is determined that there is an obstacle between the camera and the graphic code.
进一步地,处理器1001可以调用存储器1005中存储的空间障碍物检测程序,还执行以下操作:Further, the
步骤S50,根据已统计的所述空间内各异常区域的分布情况,确定所述障碍物的空间位置;Step S50, determining the spatial position of the obstacle according to the statistical distribution of each abnormal area in the space;
步骤S60,按照预设检测周期,重复执行预设检测次数的步骤S10-S40的操作,以更新统计所述空间内各异常区域的分布情况;Step S60, repeating the operations of steps S10-S40 for a preset number of detections according to a preset detection period, to update statistics on the distribution of each abnormal area in the space;
步骤S70,比对所述空间内各异常区域的新旧分布情况,得到所述空间内各异常区域的分布变化情况,并确定所述障碍物在所述空间内的位置变化情况。Step S70: Compare the new and old distributions of each abnormal area in the space, obtain the distribution change of each abnormal area in the space, and determine the position change of the obstacle in the space.
进一步地,处理器1001可以调用存储器1005中存储的空间障碍物检测程序,还执行以下操作:Further, the
步骤S80,判定所述障碍物的位置变化情况是否符合预设障碍物报警条件;Step S80, determining whether the position change of the obstacle meets the preset obstacle alarm condition;
步骤S90,若是,则向目标管理端发送障碍物报警信号。Step S90, if yes, send an obstacle alarm signal to the target management terminal.
其中,所述目标管理端包括嵌入式物联网装置和/或云服务平台、和/或移动设备端。Wherein, the target management terminal includes an embedded IoT device and/or a cloud service platform, and/or a mobile device terminal.
进一步地,处理器1001可以调用存储器1005中存储的空间障碍物检测程序,还执行以下操作:Further, the
步骤S100,向目标管理端发送障碍物报警提示信号;Step S100, sending an obstacle warning signal to the target management terminal;
步骤S110,向预设联动执行装置发送联动执行控制指令,以控制所述预设联动执行装置执行对应的控制动作。Step S110 , sending a linkage execution control instruction to a preset linkage execution device to control the preset linkage execution device to perform a corresponding control action.
其中,所述目标管理端包括嵌入式物联网装置和/或云服务平台、和/或移动设备端。Wherein, the target management terminal includes an embedded IoT device and/or a cloud service platform, and/or a mobile device terminal.
进一步地,处理器1001可以调用存储器1005中存储的空间障碍物检测程序,还执行以下操作:Further, the
在所述图形码中嵌入对应的所述预设位置区域的位置信息。The position information of the corresponding preset position area is embedded in the graphic code.
参照图2,本发明第一实施例提供一种空间障碍物检测方法,所述空间障碍物检测方法包括:Referring to FIG. 2, the first embodiment of the present invention provides a method for detecting a space obstacle, and the method for detecting a space obstacle includes:
步骤S10,启动摄像装置进行检测,确认是否识别到所述空间任一预设位置区域对应放置的图形码;Step S10, start the camera to detect, and confirm whether the graphic code placed corresponding to any preset position area of the space is recognized;
步骤S20,若无法识别所述图形码,则判定所述预设位置区域为异常区域;Step S20, if the graphic code cannot be identified, it is determined that the preset location area is an abnormal area;
步骤S30,统计所述空间内各异常区域的分布情况;Step S30, statistics the distribution of each abnormal area in the space;
步骤S40,当各所述异常区域的分布情况符合预设障碍物存在判定条件时,判定所述摄像装置与所述图形码之间存在障碍物。Step S40, when the distribution of each of the abnormal areas meets a preset obstacle existence determination condition, it is determined that there is an obstacle between the camera and the graphic code.
在具体实施中,需要在空间内的预设位置区域放置图形码,并设置用于识别所述图形码的摄像装置;其中,所述空间可以包括密闭空间及非密闭空间,例如生产车间、地下停车场;空间内放置图形码的预设位置可以是空间内的墙壁、地面或者其它可用于放置图形码位置区域,这里不做限制。放置的图形码是指用某种特定的几何图形按一定规律在平面分布的记录数据和信息图形及符号,具体可以是一维码、二维码、彩码,本发明实施例中优选为二维码。而所述摄像装置不仅仅包括一般的摄像设备如摄像机,还可以包括其他具有图形码识别功能的图型识别攝像机、传感组件或者装置。进一步地,所述图形码中嵌入对应的所述预设位置区域的位置信息。例如,在地下停车场的停车位区域内放置二维码,二维码中预先嵌入了停车位位置、序号的位置信息编码,例如“北区第10号车位”;或者在停车场的通道上放置二维码,二维码中的位置信息编码可以是“第2通道第5位置”。例如采用摄像机作为传感器识别图形码,其中一个摄像机或者其它摄像检测装置可以识别一个或者多个图形码,摄像机可以根据实际需要进行数量、空间安装位置的设置。在正常无障碍物遮挡的情况下,检测装置可正常检测到预设位置区域的图形码,检测周期可以根据实际需要进行设定,例如每个200毫秒检测一次。当障碍物出现某一预设位置区域时,由于障碍物的遮挡作用,导致检测装置无法检测到相应的图形码,因此可以判定该预设位置区域为异常区域。此时,可以统计被判定为异常区域的各个预设位置区域的分布情况,包括异常区域的分布位置、数量、分布变化情况,从而对空间内是否存在障碍物、障碍物的形状及体积、障碍物的移动情况进行判定。需要说明的是,判定的算法及条件可以根据相关的数据库、实验测定数据、人工计算结果得到,这里不作限制。In a specific implementation, a graphic code needs to be placed in a preset position area in the space, and a camera device for identifying the graphic code needs to be installed; wherein, the space may include closed space and non-closed space, such as production workshop, underground Parking lot; the preset position for placing the graphic code in the space can be the wall, the ground or other areas that can be used to place the graphic code in the space, which is not limited here. The placed graphic code refers to the recorded data and information graphics and symbols that are distributed on a plane with a certain specific geometric figure according to a certain rule, which can be specifically a one-dimensional code, a two-dimensional code, and a color code. In the embodiment of the present invention, it is preferably two. dimensional code. The camera device not only includes general camera equipment such as a video camera, but also includes other pattern recognition cameras, sensing components or devices with a pattern code recognition function. Further, the position information of the corresponding preset position area is embedded in the graphic code. For example, place a two-dimensional code in the parking space area of the underground parking lot, and the two-dimensional code is pre-embedded with the location information code of the parking space location and serial number, such as "No. 10 parking space in the North District"; or on the passage of the parking lot Place the QR code, the location information code in the QR code can be "2nd channel 5th position". For example, a camera is used as a sensor to identify graphic codes, one camera or other camera detection device can identify one or more graphic codes, and the number and spatial installation position of the cameras can be set according to actual needs. Under the condition that there is no obstruction normally, the detection device can normally detect the graphic code in the preset position area, and the detection period can be set according to actual needs, for example, once every 200 milliseconds. When an obstacle appears in a certain preset position area, the detection device cannot detect the corresponding graphic code due to the blocking effect of the obstacle, so it can be determined that the preset position area is an abnormal area. At this time, the distribution of each preset location area that is determined to be an abnormal area can be counted, including the distribution position, quantity, and distribution change of the abnormal area, so as to determine whether there are obstacles in the space, the shape and volume of obstacles, obstacles The movement of objects is judged. It should be noted that the algorithm and conditions for determination can be obtained according to relevant databases, experimental measurement data, and manual calculation results, which are not limited here.
举例来说,在地下停车场内,可将多个图形码置于墙壁或者车道上,据此判断是否出现停车场内车辆堵塞;在停车场进出口车道以及其延长段,可将多个图形码置于车道上,据此判断是否有车辆或者车辆的行驶方向;多个图形码在一定时间段被遮挡或者按照一定的先后顺序被遮挡,则可判断出现出入口出现堵塞。For example, in an underground parking lot, multiple graphic codes can be placed on the walls or lanes to judge whether there is a traffic jam in the parking lot; The code is placed on the lane to judge whether there is a vehicle or the driving direction of the vehicle; if multiple graphic codes are blocked in a certain period of time or in a certain order, it can be judged that the entrance and exit are blocked.
针对消防通道以及重要的疏散通道,可将多个图形码置于墙壁或者通道上,据此判断是否被占用;或者根据多个图形码之间的被遮挡的逻辑关系判断是否被堵塞,以便及时发现消防通道被障碍物堵塞、占用的情况,并及时处理、消除安全隐患。For fire escapes and important evacuation passages, multiple graphic codes can be placed on walls or passages to judge whether they are occupied; Find the situation that the fire escape is blocked or occupied by obstacles, and deal with it in time to eliminate potential safety hazards.
本实施例通过在摄像装置无法识别空间任一预设位置区域对应放置的图形码时,判定所述预设位置区域为异常区域,并在各所述异常区域的分布情况符合预设空间障碍物存在判定条件时,判定所述摄像装置与所述图形码之间存在障碍物,可方便快捷检测出空间内是否存在障碍物,有利于现场管理和物体识别。In this embodiment, when the camera device cannot identify the graphic code corresponding to any preset position area in space, it is determined that the preset position area is an abnormal area, and the distribution of each abnormal area conforms to the preset spatial obstacles When the determination condition exists, it is determined that there is an obstacle between the camera device and the graphic code, which can conveniently and quickly detect whether there is an obstacle in the space, which is beneficial to on-site management and object recognition.
进一步的,参照图3,本发明第二实施例提供一种空间障碍物检测方法,基于上述图2所示的实施例,所述判定所述摄像装置与所述图形码之间存在障碍物的步骤之后,还包括:Further, referring to FIG. 3 , a second embodiment of the present invention provides a method for detecting a space obstacle. Based on the embodiment shown in FIG. 2 , the method for determining the existence of an obstacle between the camera and the graphic code is described. After the steps, also include:
步骤S50,根据已统计的所述空间内各异常区域的分布情况,确定所述障碍物的空间位置;Step S50, determining the spatial position of the obstacle according to the statistical distribution of each abnormal area in the space;
步骤S60,按照预设检测周期,重复执行预设检测次数的步骤S10-S40的操作,以更新统计所述空间内各异常区域的分布情况;Step S60, repeating the operations of steps S10-S40 for a preset number of detections according to a preset detection period, to update statistics on the distribution of each abnormal area in the space;
步骤S70,比对所述空间内各异常区域的新旧分布情况,得到所述空间内各异常区域的分布变化情况,并确定所述障碍物在所述空间内的位置变化情况。Step S70: Compare the new and old distributions of each abnormal area in the space, obtain the distribution change of each abnormal area in the space, and determine the position change of the obstacle in the space.
在判定空间内存在障碍物之后,根据已统计的所述空间内各异常区域的分布情况,可进一步确定障碍物的具体位置信息。例如可以通过识别技术确定某辆汽车的车辆信息,包括车牌号;然后本发明实施例的空间障碍物检测方法,确定所述汽车在停车场的具体位置。After it is determined that there is an obstacle in the space, the specific location information of the obstacle can be further determined according to the statistical distribution of each abnormal area in the space. For example, the vehicle information of a certain car, including the license plate number, can be determined through identification technology; then, the space obstacle detection method of the embodiment of the present invention determines the specific position of the car in the parking lot.
进一步的,通过重复执行预设检测次数的步骤S10-S40的操作,得到更新统计所述空间内各异常区域的分布情况,并比对各异常区域的新旧分布情况,得到所述空间内各异常区域的分布变化情况,最终确定所述障碍物在所述空间内的位置变化情况。其中,所述预设检测周期可以是200毫秒,或者其它的设置检测周期时间;而预设检测次数可以根据用户的实际需要进行设置。对于障碍物检测而言,当障碍物存在位置的变化时,例如车辆移动、人为搬抬障碍物。此时,可以在一定时间内获取和统计被判定为异常区域的预设位置的分布变化情况,判断障碍物位置是否变化、位置变化情况,以便提供给管理者进行后续管理操作的判断依据和参考信息。Further, by repeating the operations of steps S10-S40 of preset detection times, the distribution of each abnormal area in the space is updated and counted, and the new and old distributions of each abnormal area are compared to obtain each abnormal area in the space. The distribution change of the area is finally determined, and the position change of the obstacle in the space is finally determined. Wherein, the preset detection period may be 200 milliseconds, or other set detection period time; and the preset detection times may be set according to the actual needs of the user. For obstacle detection, when the position of the obstacle changes, for example, the vehicle moves or the obstacle is lifted manually. At this time, the distribution changes of the preset positions determined to be abnormal areas can be acquired and counted within a certain period of time, and whether the position of the obstacles has changed and the position changes can be determined, so as to provide the administrator with the judgment basis and reference for subsequent management operations. information.
进一步的,如图4所示,步骤S70之后,还包括:Further, as shown in Figure 4, after step S70, it also includes:
步骤S80,判定所述障碍物的位置变化情况是否符合预设障碍物报警条件;Step S80, determining whether the position change of the obstacle meets the preset obstacle alarm condition;
步骤S90,若是,则向目标管理端发送障碍物报警信号。Step S90, if yes, send an obstacle alarm signal to the target management terminal.
对于已确定位置的障碍物,当用户需要对障碍物进行进一步的管理或者监控时,可以判定所述障碍物的位置变化情况是否符合预设障碍物报警条件。其中,预设障碍物报警条件可以包括:障碍物的位置变化区域、移动方向、移动速度等。举例来说,对于基于自动导引运输车进行货物移动的分拣现场,可以通过识别货物料架及料架的位置变化,确定料架是否正确搬运到指定位置。当料架的搬运距离过短或者或长,会相应地触发报警信号。此时,会向目标管理端发送报警信号,用以发送料架搬运不正确的信息。其中,所述目标管理端包括嵌入式物联网装置和/或云服务平台、和/或移动设备端。For an obstacle whose position has been determined, when the user needs to further manage or monitor the obstacle, it can be determined whether the position change of the obstacle complies with the preset obstacle alarm condition. Wherein, the preset obstacle alarm conditions may include: position change area, moving direction, moving speed, etc. of the obstacle. For example, for a sorting site based on automatic guided transport vehicles for moving goods, it can be determined whether the material racks are correctly transported to the designated position by identifying the material racks and the position changes of the material racks. When the conveying distance of the material rack is too short or long, an alarm signal will be triggered accordingly. At this time, an alarm signal will be sent to the target management terminal to send the information that the material rack is not transported correctly. Wherein, the target management terminal includes an embedded IoT device and/or a cloud service platform, and/or a mobile device terminal.
本实施例中,通过在判定所述空间存在障碍物的步骤之后,根据各所述异常区域的分布变化情况,判断所述障碍物在所述空间的位置变化情况,以及当障碍物的空间位置变化情况符合报警条件时发送报警信号,从而提供判断障碍物位置变化情况及进行后续管控的更为精细具体的方法。In this embodiment, after the step of judging that there are obstacles in the space, according to the distribution changes of each of the abnormal areas, it is judged that the position changes of the obstacles in the space, and the spatial position of the obstacles when the obstacles are changed. When the changes meet the alarm conditions, an alarm signal is sent, so as to provide a more precise and specific method for judging the changes in the position of obstacles and for subsequent management and control.
进一步的,参照图5,本发明第三实施例提供一种空间障碍物检测方法,基于上述图2所示的实施例,所述判定所述摄像装置与所述图形码之间存在障碍物的步骤之后,还包括:Further, referring to FIG. 5 , a third embodiment of the present invention provides a method for detecting a space obstacle. Based on the embodiment shown in FIG. 2 , the method for determining the existence of an obstacle between the camera and the graphic code is described. After the steps, also include:
步骤100,向目标管理端发送空障碍物提示信号;
步骤S110,向预设联动执行装置发送联动执行控制指令,以控制所述预设联动执行装置执行对应的控制动作。Step S110 , sending a linkage execution control instruction to a preset linkage execution device to control the preset linkage execution device to perform a corresponding control action.
其中,所述目标管理端包括嵌入式物联网装置和/或云服务平台、和/或移动设备端。在判定所述空间存在障碍物后,向预设联动执行装置发送联动执行控制指令,从而联动第三方系统进行工作;其中所述预设联动执行装置可包括但不限于:现场声光报警装置、屏幕显示装置;根据联动执行控制指令,联动执行装置执行对应的控制操作,例如进行现场声光或者语音报警。需要注意的是,联动执行控制指令的发送端可以是现场摄像装置,也可以是目标管理端。例如,当地下停车场检测到地下通道存在车辆堵塞时,检测装置向停车场物业管理单位的嵌入式物联网装置或者云服务平台发送车辆堵塞提示信号,用以向管理单位提供车辆堵塞的情况报告信息,管理单位可以相应地派遣工作人员及时赶赴现场进行疏导。此外,还可以将车辆堵塞提示信号传送给视频车位检测系统作为系统干扰信号,联动视频车位检测系统做出相应的干扰处理,或者保持拥堵位置车牌检测结果不变,以免造成误识别。Wherein, the target management terminal includes an embedded IoT device and/or a cloud service platform, and/or a mobile device terminal. After it is determined that there is an obstacle in the space, a linkage execution control command is sent to the preset linkage execution device, so as to link the third-party system to work; wherein the preset linkage execution device may include but not limited to: on-site sound and light alarm device, Screen display device; according to the linkage execution control instruction, the linkage execution device executes the corresponding control operation, such as on-site sound and light or voice alarm. It should be noted that the sending end of the linkage execution control instruction may be the on-site camera device or the target management end. For example, when the underground parking lot detects that there is a vehicle congestion in the underground passage, the detection device sends a vehicle congestion reminder signal to the embedded Internet of Things device or cloud service platform of the parking lot property management unit, so as to provide the management unit with a report of vehicle congestion. information, the management unit can accordingly dispatch staff to rush to the scene in time for guidance. In addition, the vehicle congestion warning signal can also be transmitted to the video parking space detection system as a system interference signal, and the video parking space detection system can be linked to make corresponding interference processing, or keep the license plate detection results in the congestion location unchanged to avoid misidentification.
在本实施例中,通过在判定所述空间存在障碍物后,向目标管理端发送空间障碍物提示信号,以便进行更精细化的管理和决策,提供管理效率。In this embodiment, after it is determined that there is an obstacle in the space, a space obstacle prompt signal is sent to the target management terminal, so as to perform more refined management and decision-making, and improve management efficiency.
此外,本发明实施例还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有空间障碍物检测程序,所述空间障碍物检测程序被处理器执行时实现如下操作:In addition, an embodiment of the present invention also provides a computer-readable storage medium, where a space obstacle detection program is stored on the computer-readable storage medium, and when the space obstacle detection program is executed by a processor, the following operations are implemented:
启动摄像装置进行检测,确认是否识别到所述空间任一预设位置区域对应放置的图形码;Start the camera to detect and confirm whether the graphic code corresponding to any preset position area in the space is recognized;
若无法识别所述图形码,则判定所述预设位置区域为异常区域;If the graphic code cannot be recognized, it is determined that the preset location area is an abnormal area;
统计所述空间内各异常区域的分布情况;Statistics on the distribution of each abnormal area in the space;
当各所述异常区域的分布情况符合预设障碍物存在判定条件时,判定所述摄像装置与所述图形码之间存在障碍物。When the distribution of each of the abnormal areas meets the preset obstacle existence determination condition, it is determined that there is an obstacle between the camera device and the graphic code.
进一步地,所述空间障碍物检测程序被处理器执行时还实现如下操作:Further, when the space obstacle detection program is executed by the processor, the following operations are also implemented:
根据已统计的所述空间内各异常区域的分布情况,确定所述障碍物的空间位置;Determine the spatial position of the obstacle according to the statistical distribution of each abnormal area in the space;
按照预设检测周期,重复执行预设检测次数的步骤S10-S40的操作,以更新统计所述空间内各异常区域的分布情况;According to the preset detection period, the operations of steps S10-S40 of the preset detection times are repeatedly performed, so as to update and count the distribution of each abnormal area in the space;
比对所述空间内各异常区域的新旧分布情况,得到所述空间内各异常区域的分布变化情况,并确定所述障碍物在所述空间内的位置变化情况。The new and old distributions of each abnormal area in the space are compared to obtain the distribution change of each abnormal area in the space, and the position change of the obstacle in the space is determined.
进一步地,所述空间障碍物检测程序被处理器执行时还实现如下操作:Further, when the space obstacle detection program is executed by the processor, the following operations are also implemented:
确定所述障碍物在所述空间内的位置变化情况的步骤之后,判定所述障碍物的位置变化情况是否符合预设障碍物报警条件;After the step of determining the position change of the obstacle in the space, determine whether the position change of the obstacle meets the preset obstacle alarm condition;
若是,则向目标管理端发送障碍物报警信号;If so, send an obstacle alarm signal to the target management terminal;
其中,所述目标管理端包括嵌入式物联网装置和/或云服务平台、和/或移动设备端。Wherein, the target management terminal includes an embedded IoT device and/or a cloud service platform, and/or a mobile device terminal.
进一步地,所述空间障碍物检测程序被处理器执行时还实现如下操作:Further, when the space obstacle detection program is executed by the processor, the following operations are also implemented:
所述判定所述空间存在障碍物的步骤之后,向目标管理端发送障碍物报警提示信号;After the step of judging that there is an obstacle in the space, send an obstacle warning signal to the target management terminal;
向预设联动执行装置发送联动执行控制指令,以控制所述预设联动执行装置执行对应的控制动作。A linkage execution control instruction is sent to the preset linkage execution device, so as to control the preset linkage execution device to execute the corresponding control action.
其中,所述目标管理端包括嵌入式物联网装置和/或云服务平台、和/或移动设备端。Wherein, the target management terminal includes an embedded IoT device and/or a cloud service platform, and/or a mobile device terminal.
进一步地,所述空间障碍物检测程序被处理器执行时还实现如下操作:Further, when the space obstacle detection program is executed by the processor, the following operations are also implemented:
在所述图形码中嵌入对应的所述预设位置区域的位置信息。The position information of the corresponding preset position area is embedded in the graphic code.
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。It should be noted that, herein, the terms "comprising", "comprising" or any other variation thereof are intended to encompass non-exclusive inclusion, such that a process, method, article or system comprising a series of elements includes not only those elements, It also includes other elements not expressly listed or inherent to such a process, method, article or system. Without further limitation, an element qualified by the phrase "comprising a..." does not preclude the presence of additional identical elements in the process, method, article or system that includes the element.
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。The above-mentioned serial numbers of the embodiments of the present invention are only for description, and do not represent the advantages or disadvantages of the embodiments.
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在如上所述的一个存储介质(如ROM/RAM、磁碟、光盘)中,包括若干指令用以使得一台终端设备(可以是手机,计算机,服务器,或者网络设备等)执行本发明各个实施例所述的方法。From the description of the above embodiments, those skilled in the art can clearly understand that the method of the above embodiment can be implemented by means of software plus a necessary general hardware platform, and of course can also be implemented by hardware, but in many cases the former is better implementation. Based on such understanding, the technical solutions of the present invention can be embodied in the form of software products in essence or the parts that make contributions to the prior art, and the computer software products are stored in a storage medium (such as ROM/RAM) as described above. , magnetic disk, optical disc), including several instructions to make a terminal device (which may be a mobile phone, a computer, a server, or a network device, etc.) to execute the methods described in the various embodiments of the present invention.
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。The above are only preferred embodiments of the present invention, and are not intended to limit the scope of the present invention. Any equivalent structure or equivalent process transformation made by using the contents of the description and drawings of the present invention, or directly or indirectly applied in other related technical fields , are similarly included in the scope of patent protection of the present invention.
Claims (8)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710958038.3ACN107895138B (en) | 2017-10-13 | 2017-10-13 | Space obstacle detection method, device and computer-readable storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710958038.3ACN107895138B (en) | 2017-10-13 | 2017-10-13 | Space obstacle detection method, device and computer-readable storage medium |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107895138A CN107895138A (en) | 2018-04-10 |
| CN107895138Btrue CN107895138B (en) | 2020-06-23 |
Family
ID=61802790
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710958038.3AActiveCN107895138B (en) | 2017-10-13 | 2017-10-13 | Space obstacle detection method, device and computer-readable storage medium |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN107895138B (en) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109919906B (en)* | 2019-01-23 | 2021-06-22 | 杭州电子科技大学 | A security detection method and system based on image processing |
| CN110046569B (en)* | 2019-04-12 | 2022-04-12 | 北京百度网讯科技有限公司 | Unmanned driving data processing method and device and electronic equipment |
| CN111382726B (en)* | 2020-04-01 | 2023-09-01 | 浙江大华技术股份有限公司 | Engineering operation detection method and related device |
| CN111738127B (en)* | 2020-06-17 | 2023-08-25 | 安徽淘云科技股份有限公司 | Entity book in-place detection method and device, electronic equipment and storage medium |
| CN112258829A (en)* | 2020-10-23 | 2021-01-22 | 上海中通吉网络技术有限公司 | Method, Apparatus and Equipment for Determining Vehicle Empty Quantity |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006047629A1 (en)* | 2006-03-14 | 2007-09-20 | Robert Bosch Gmbh | Method for determining object parameters of a pedestrian |
| DE102014003330A1 (en)* | 2014-03-08 | 2015-09-10 | Aissa Zouhri | Automatic parking lock |
| CN105493143A (en)* | 2013-04-04 | 2016-04-13 | 日本电气株式会社 | Identification method, identification system, matching device, and program |
| CN106447256A (en)* | 2016-09-09 | 2017-02-22 | 智能侠(北京)科技有限公司 | Intelligent mobile device-based storage intelligent scheduling monitoring management method and system |
| CN106897648A (en)* | 2016-07-22 | 2017-06-27 | 阿里巴巴集团控股有限公司 | Method and system for identifying two-dimensional code position |
| CN107025455A (en)* | 2017-04-01 | 2017-08-08 | 浙江华睿科技有限公司 | A kind of localization method and device in fast reaction QR codes region |
| CN107045677A (en)* | 2016-10-14 | 2017-08-15 | 北京石油化工学院 | A kind of harmful influence warehouse barrier Scan orientation restoring method, apparatus and system |
| CN107507174A (en)* | 2017-08-16 | 2017-12-22 | 杭州意能电力技术有限公司 | Power plant's instrument equipment drawing based on hand-held intelligent inspection is as recognition methods and system |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7290702B2 (en)* | 2004-12-28 | 2007-11-06 | Elbex Video Ltd. | Method and apparatus for recording and utilizing unknown signals of remote control devices |
| US20080166018A1 (en)* | 2007-01-05 | 2008-07-10 | Motorola, Inc. | Method and apparatus for performing object recognition on a target detected using motion information |
| CN101419709B (en)* | 2008-12-08 | 2012-07-18 | 北京航空航天大学 | Plane target drone characteristic point automatic matching method for demarcating video camera |
| CN104657737B (en)* | 2013-11-20 | 2018-01-16 | 航天信息股份有限公司 | The method and apparatus being corrected based on cluster to QR image in 2 D code |
| DE102014205734A1 (en)* | 2014-03-27 | 2015-10-01 | Continental Teves Ag & Co. Ohg | Method for property classification of objects for a vehicle safety system of a vehicle |
| CN206322316U (en)* | 2016-11-29 | 2017-07-11 | 上海泓鎏智能科技有限公司 | Overheight Vehicles capturing system based on video detection |
| CN107066970B (en)* | 2017-04-13 | 2020-04-24 | 深圳力子机器人有限公司 | Visual positioning method, device and system for AGV (automatic guided vehicle) |
- 2017
- 2017-10-13CNCN201710958038.3Apatent/CN107895138B/enactiveActive
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006047629A1 (en)* | 2006-03-14 | 2007-09-20 | Robert Bosch Gmbh | Method for determining object parameters of a pedestrian |
| CN105493143A (en)* | 2013-04-04 | 2016-04-13 | 日本电气株式会社 | Identification method, identification system, matching device, and program |
| DE102014003330A1 (en)* | 2014-03-08 | 2015-09-10 | Aissa Zouhri | Automatic parking lock |
| CN106897648A (en)* | 2016-07-22 | 2017-06-27 | 阿里巴巴集团控股有限公司 | Method and system for identifying two-dimensional code position |
| CN106447256A (en)* | 2016-09-09 | 2017-02-22 | 智能侠(北京)科技有限公司 | Intelligent mobile device-based storage intelligent scheduling monitoring management method and system |
| CN107045677A (en)* | 2016-10-14 | 2017-08-15 | 北京石油化工学院 | A kind of harmful influence warehouse barrier Scan orientation restoring method, apparatus and system |
| CN107025455A (en)* | 2017-04-01 | 2017-08-08 | 浙江华睿科技有限公司 | A kind of localization method and device in fast reaction QR codes region |
| CN107507174A (en)* | 2017-08-16 | 2017-12-22 | 杭州意能电力技术有限公司 | Power plant's instrument equipment drawing based on hand-held intelligent inspection is as recognition methods and system |
Non-Patent Citations (3)
| Title |
|---|
| Detecting coherent structures using braids;Allshouse M R, et.al;《Nonlinear Phenomena》;20121231;全文* |
| 二维码技术在图书借还管理系统中的运用;郑旭霞;《中国民族博览》;20151231;全文* |
| 基于射频识别技术的物联网销售应用系统研究;郭稳涛,等;《自动化应用》;20141231;全文* |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107895138A (en) | 2018-04-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107895138B (en) | Space obstacle detection method, device and computer-readable storage medium | |
| CN107978157B (en) | Vehicle management method, device and computer readable storage medium | |
| KR101482715B1 (en) | Apparatus for mobile phone based fire evacuation | |
| KR101354049B1 (en) | Method for pedestrians jaywalking information notification system | |
| KR20200136937A (en) | Method and apparatus for monitoring and managing loading dock and facility operations | |
| US20150054949A1 (en) | Doorbell communication systems and methods | |
| CN108885820B (en) | Gas detector apparatus and method of updating location information thereon | |
| KR101927364B1 (en) | Outside Intruding and Monitering Radar Syatem Based on Deep -Learning and Method thereof | |
| CN101965598A (en) | The electronic article monitoring system neural network of minimum false alarm and deactivation failure | |
| JP2022526071A (en) | Situational awareness monitoring | |
| KR20150014618A (en) | Method and its apparatus for configuring the position of target device | |
| US11016189B2 (en) | Systems and methods for security system device tamper detection | |
| CN113744565B (en) | Collision warning method, device, electronic equipment and self-driving vehicle | |
| WO2022142973A1 (en) | Robot protection system and method | |
| CN112767647A (en) | Danger early warning method, device, equipment and computer readable storage medium | |
| CN110992707A (en) | Vehicle parking management method, system and computer readable storage medium | |
| CN107730902B (en) | Recording method of vehicle video, camera equipment and storage medium | |
| CN108320497B (en) | Method and device for detecting behavior of pedestrian running red light and computer readable storage medium | |
| CN113344900B (en) | Airport runway intrusion detection method, airport runway intrusion detection device, storage medium and electronic device | |
| US20240054489A1 (en) | Traffic information processing methods, apparatuses, electronic devices, servers, and storage mediums | |
| WO2022098305A1 (en) | Autonomous safety violation detection system through virtual fencing | |
| US11052909B1 (en) | Object zone identification | |
| JP2012174058A (en) | Specific event detection device, system, method and program | |
| US12010177B2 (en) | Device and method for handling critical events in an IoT environment | |
| JP2020201785A (en) | Commodity management device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right | Effective date of registration:20250221 Address after:Room 336, 3rd Floor, R&D Building, 588 Rheinda Road, Jiangning District, Nanjing City, Jiangsu Province 210000 (Jiangning High tech Park) Patentee after:Nanjing Songsui Information Technology Co.,Ltd. Country or region after:China Address before:710075 room 21304, unit 2, building 1, 34 Fenghui South Road, high tech Zone, Xi'an City, Shaanxi Province Patentee before:XI'AN LUCKYSTAR SOFTWARE EQUIPMENT SYSTEM Co.,Ltd. Country or region before:China | |
| TR01 | Transfer of patent right |