CN107305247B - Channel model formula correction method, device and equipment - Google Patents
Channel model formula correction method, device and equipmentDownload PDFInfo
- Publication number
- CN107305247B CN107305247BCN201610262337.9ACN201610262337ACN107305247BCN 107305247 BCN107305247 BCN 107305247BCN 201610262337 ACN201610262337 ACN 201610262337ACN 107305247 BCN107305247 BCN 107305247B
- Authority
- CN
- China
- Prior art keywords
- node
- channel model
- distance
- result data
- model formula
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/021—Calibration, monitoring or correction
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Mobile Radio Communication Systems (AREA)
- Other Investigation Or Analysis Of Materials By Electrical Means (AREA)
- Pharmaceuticals Containing Other Organic And Inorganic Compounds (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及定位技术领域,特别涉及一种信道模型公式修正方法、装置及设备。The present invention relates to the technical field of positioning, and in particular, to a method, device and device for correcting a channel model formula.
背景技术Background technique
定位是一种常用的技术,现已广泛应用于手机定位、汽车定位等多种领域。定位的方式有很多种,最常用的是利用信道模型公式来进行定位。Positioning is a commonly used technology, which has been widely used in mobile phone positioning, car positioning and other fields. There are many ways of positioning, and the most commonly used method is to use the channel model formula for positioning.
具体地,针对某一定位区域确定信道模型公式,信道模型公式包括该定位区域内的已测量的节点N1,0与节点N2,0之间的距离、信号传播特征以及信道衰减参数等,从而保证该信道模型公式可以表示信号传播特征与距离的关联关系,根据该信道模型公式,对该定位区域内未知位置的节点Nv进行定位时,测量节点Nv与该定位区域内任一已知位置的节点Nu之间的信号传播特征后,根据该信道模型公式和该信号传播特征,计算出节点Nu与节点Nv之间的距离,从而根据节点Nu的位置估计出节点Nv的位置。Specifically, a channel model formula is determined for a certain positioning area, and the channel model formula includes the measured distance between node N1,0 and node N2,0 in the positioning area, signal propagation characteristics, and channel attenuation parameters, etc., Therefore, it is ensured that the channel model formula can represent the relationship between the signal propagation characteristics and the distance. According to the channel model formula, when locating the node Nv of the unknown position in the positioning area, the measurement node Nv and any existing node in the positioning area are measured. After knowing the signal propagation characteristics between the nodesNu at the location, according to the channel model formula and the signal propagation characteristics, the distance between the nodeNu and the node Nv is calculated, so as to estimate the node Naccording to the position of the node Nu the position ofv .
例如,该信道模型公式可以为:
但是,定位区域内的无线信号的传播环境经常会发生变化,一旦发生变化,原先建立的信道模型公式将不能准确表示变化后传播环境下的信号传播特征与距离的关联关系,如果仍采用原先的信道模型公式进行定位,会降低定位精度。However, the propagation environment of wireless signals in the positioning area often changes. Once the change occurs, the previously established channel model formula will not be able to accurately represent the relationship between the signal propagation characteristics and distance in the changed propagation environment. The channel model formula is used for positioning, which will reduce the positioning accuracy.
发明内容SUMMARY OF THE INVENTION
为了解决现有技术的问题,本发明实施例提供了一种信道模型公式修正方法、装置及设备。所述技术方案如下:In order to solve the problems in the prior art, the embodiments of the present invention provide a method, apparatus, and device for correcting a channel model formula. The technical solution is as follows:
第一方面,提供了一种信道模型公式修正方法,所述方法包括:In a first aspect, a method for correcting a channel model formula is provided, the method comprising:
收集m组定位结果数据,其中,第i组定位结果数据包括节点Nu,i与节点Nv,i之间的距离di和信号传播特征Pi,di和Pi是根据信道模型公式及节点Nu,i的位置对节点Nv,i进行定位后得到的,所述信道模型公式用于表示信号传播特征与距离的关联关系,i表示定位次数,i=1,2...m,u和v表示节点编号;Collect m groups of positioning result data, wherein, the i-th group of positioning result data includes the distance di between the node Nu, i and the node Nv, i and the signal propagation characteristic Pi , di and Pi are based on the channel model formula and the position of node Nu, i are obtained after locating node Nv, i , the channel model formula is used to represent the relationship between signal propagation characteristics and distance, i represents the number of positioning times, i=1, 2... m, u and v represent node numbers;
根据m组定位结果数据中的距离和信号传播特征对所述信道模型公式进行修正,得到修正后的信道模型公式。The channel model formula is modified according to the distance and signal propagation characteristics in the m groups of positioning result data to obtain the modified channel model formula.
结合第一方面,在第一方面的第一种可能实现方式中,所述收集m组定位结果数据,包括:With reference to the first aspect, in a first possible implementation manner of the first aspect, the collecting m groups of positioning result data includes:
接收定位服务器发送的di和Pi;或者,receive di and Pi sent by the positioning server; or,
接收节点Nv,i发送的di和Pi。Di andPi sent by node Nv,iare received.
结合第一方面,在第一方面的第二种可能实现方式中,所述收集m组定位结果数据,包括:With reference to the first aspect, in a second possible implementation manner of the first aspect, the collecting m groups of positioning result data includes:
接收节点Nv,i发送的位置信息和Pi,所述位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di。Receive the position information and Pi sent by the node Nv, i, the position information is used to indicate the position of the node Nv , i, and calculate the node Nu according to the position of the node Nv, i and the position of the node N v,i , the distance d i between i and node Nv,i .
结合第一方面,在第一方面的第三种可能实现方式中,所述收集m组定位结果数据,包括:With reference to the first aspect, in a third possible implementation manner of the first aspect, the collection of m groups of positioning result data includes:
接收节点Nv,i发送的位置信息,并接收定位服务器发送的Pi,所述位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di。Receive the position information sent by the node Nv, i , and receive the Pi sent by the positioning server, the position information is used to indicate the position of the node Nv, i , according to the position of the node Nu, i and the position of the node Nv, i position, the distance di between node Nu,i and nodeNv,i is calculated.
结合第一方面,在第一方面的第四种可能实现方式中,所述收集m组定位结果数据,包括:With reference to the first aspect, in a fourth possible implementation manner of the first aspect, the collection of m groups of positioning result data includes:
接收节点Nv,i发送的位置信息,并接收节点Nu,i发送的Pi,所述位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di。Receive the location information sent by the node Nv, i , and receive the Pi sent by the node Nu, i , the location information is used to indicate the location of the node Nv, i , according to the location of the node Nu, i and the node Nv , the position of i , calculate the distance d i between node Nu,i and nodeNv,i .
结合第一方面,在第一方面的第五种可能实现方式中,所述收集m组定位结果数据,包括:With reference to the first aspect, in a fifth possible implementation manner of the first aspect, the collection of m groups of positioning result data includes:
接收定位服务器发送的节点Nv,i的位置信息和Pi,所述位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di。Receive the position information and Pi of the node Nv, i sent by the positioning server, the position information is used to indicate the position of the node Nv, i , according to the position of the node Nu, i and the position of the node Nv, i , calculate Distance d i between node Nu,i and nodeNv,i .
结合第一方面,在第一方面的第六种可能实现方式中,所述收集m组定位结果数据,包括:With reference to the first aspect, in a sixth possible implementation manner of the first aspect, the collection of m groups of positioning result data includes:
接收定位服务器发送的节点Nv,i的位置信息,并接收节点Nv,i发送的Pi,所述位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di。Receive the location information of the node Nv, i sent by the positioning server, and receive the Pi sent by the node Nv, i, the location information is used to indicate the location of the node Nv, i , according to the location of the node Nu, i and The position of the node Nv ,i, the distance di between the node Nu,i and the node Nv,i is calculated.
结合第一方面,在第一方面的第七种可能实现方式中,所述收集m组定位结果数据,包括:With reference to the first aspect, in a seventh possible implementation manner of the first aspect, the collection of m groups of positioning result data includes:
接收定位服务器发送的节点Nv,i的位置信息,并接收节点Nu,i发送的Pi,所述位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di。Receive the position information of the node Nv, i sent by the positioning server, and receive the Pi sent by the node Nu, i, the position information is used to indicate the position of the node Nv, i , according to the position and The position of the node Nv ,i, the distance di between the node Nu,i and the node Nv,i is calculated.
结合第一方面,在第一方面的第八种可能实现方式中,所述信道模型公式为
其中,d0表示已测量的节点N1,0与节点N2,0之间的参考距离,P0表示节点N1,0与节点N2,0之间的参考信号强度,n表示信道衰减参数,
所述根据m组定位结果数据中的距离和信号传播特征对所述信道模型公式进行修正,得到修正后的信道模型公式,包括:The channel model formula is modified according to the distance and signal propagation characteristics in the m groups of positioning result data to obtain the modified channel model formula, including:
根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的参考信号强度P0’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected reference signal strength P0 ':

根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的信道衰减参数n’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected channel attenuation parameter n':

根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的均方差σ’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected mean square error σ':

根据P0’、n’和σ’,得到修正后的信道模型公式

采用滤波平滑算法,对P0、n、σ、P0’、n’和σ’进行平滑处理,得到P0”、n”和σ”,根据P0”、n”和σ”得到修正后的信道模型公式

结合第一方面,在第一方面的第九种可能实现方式中,所述信道模型公式为
其中,d0表示已测量的节点N1,0与节点N2,0之间的参考距离,P0表示节点N1,0与节点N2,0之间的参考信号强度,α表示信道衰减参数,
所述根据m组定位结果数据中的距离和信号传播特征对所述信道模型公式进行修正,得到修正后的信道模型公式,包括:The channel model formula is modified according to the distance and signal propagation characteristics in the m groups of positioning result data to obtain the modified channel model formula, including:
根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的参考信号强度P0’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected reference signal strength P0 ':

根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的信道衰减参数α’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected channel attenuation parameter α':

根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的均方差σ’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected mean square error σ':

根据P0’、α’和σ’,得到修正后的信道模型公式

采用滤波平滑算法,对P0、α、σ、P0’、α’和σ’进行平滑处理,得到P0”、α”和σ”,根据P0”、α”和σ”得到修正后的信道模型公式

结合第一方面,在第一方面的第十种可能实现方式中,所述信道模型公式为
其中,a表示第一加权参数,b表示第二加权参数,变量d表示节点Nu与节点Nv之间的距离,c为电磁波速率,变量Pt表示节点Nu与节点Nv之间的信号传播时间,
所述根据m组定位结果数据中的距离和信号传播特征对所述信道模型公式进行修正,得到修正后的信道模型公式,包括:The channel model formula is modified according to the distance and signal propagation characteristics in the m groups of positioning result data to obtain the modified channel model formula, including:
根据m组定位结果数据中的距离和信号传播时间,采用以下公式,计算修正后的第一加权参数α’:According to the distance and signal propagation time in the m groups of positioning result data, the following formula is used to calculate the revised first weighting parameter α':

根据m组定位结果数据中的距离和信号传播时间,采用以下公式,计算修正后的第二加权参数b’:According to the distance and signal propagation time in the m groups of positioning result data, the following formula is used to calculate the revised second weighting parameter b':

根据m组定位结果数据中的距离和信号传播时间,采用以下公式,计算修正后的均方差σ’:According to the distance and signal propagation time in the m groups of positioning result data, the following formula is used to calculate the corrected mean square error σ':

根据a’、b’和σ’,得到修正后的信道模型公式

采用滤波平滑算法,对a、b、σ、α’、b’和σ’进行平滑处理,得到α”、b”和σ”,根据α”、b”和σ”得到修正后的信道模型公式

结合第一方面的任一种可能实现方式,在第一方面的第十一种可能实现方式中,所述滤波平滑算法为S”=x*S+(1-x)*S’;With reference to any possible implementation manner of the first aspect, in an eleventh possible implementation manner of the first aspect, the filtering and smoothing algorithm is S"=x*S+(1-x)*S';
其中,S表示原始参数,S’表示对S进行修正后得到的修正参数,S”表示对S和S’进行平滑处理后得到的参数,x表示加权系数,x为[0,1)范围内的数;Among them, S represents the original parameter, S' represents the correction parameter obtained after correcting S, S" represents the parameter obtained after smoothing S and S', x represents the weighting coefficient, and x is in the range of [0, 1) the number of;
或者,所述滤波平滑算法为
其中,j表示修正次数,S表示原始参数,S(j-i+1)’表示在第j-i+1次对S进行修正后得到的修正参数,S(j)”表示在第j次修正时进行平滑处理后得到的参数,x表示加权系数,xi为[0,1)范围内的数,且
第二方面,提供了一种信道模型公式修正装置,所述装置包括:In a second aspect, a channel model formula correction device is provided, the device comprising:
收集模块,用于收集m组定位结果数据,其中,第i组定位结果数据包括节点Nu,i与节点Nv,i之间的距离di和信号传播特征Pi,di和Pi是根据信道模型公式及节点Nu,i的位置对节点Nv,i进行定位后得到的,所述信道模型公式用于表示信号传播特征与距离的关联关系,i表示定位次数,i=1,2...m,u和v表示节点编号;The collection module is used to collect m groups of positioning result data, wherein the i-th group of positioning result data includes the distance di between the nodes Nu, i and the nodes Nv, i and the signal propagation characteristics Pi , di and Pi is obtained by locating the node Nv, i according to the channel model formula and the position of the node Nu, i . The channel model formula is used to represent the correlation between the signal propagation characteristics and the distance, i represents the number of positioning times, and i=1 , 2...m, u and v represent node numbers;
修正模块,用于根据m组定位结果数据中的距离和信号传播特征对所述信道模型公式进行修正,得到修正后的信道模型公式。The correction module is used for correcting the channel model formula according to the distance and signal propagation characteristics in the m groups of positioning result data to obtain the corrected channel model formula.
结合第二方面,在第二方面的第一种可能实现方式中,所述收集模块具体用于接收定位服务器发送的di和Pi;或者,接收节点Nv,i发送的di和Pi。With reference to the second aspect, in a first possible implementation manner of the second aspect, the collection module is specifically configured to receive di and Pi sent by the positioning server; or, receive di and P i sent by the node Nv, ii .
结合第二方面,在第二方面的第二种可能实现方式中,所述收集模块具体用于:With reference to the second aspect, in a second possible implementation manner of the second aspect, the collection module is specifically configured to:
接收节点Nv,i发送的位置信息和Pi,所述位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di。Receive the position information and Pi sent by the node Nv, i, the position information is used to indicate the position of the node Nv , i, and calculate the node Nu according to the position of the node Nv, i and the position of the node N v,i , the distance d i between i and node Nv,i .
结合第二方面,在第二方面的第三种可能实现方式中,所述收集模块具体用于:With reference to the second aspect, in a third possible implementation manner of the second aspect, the collection module is specifically used for:
接收节点Nv,i发送的位置信息,并接收定位服务器发送的Pi,所述位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di。Receive the position information sent by the node Nv, i , and receive the Pi sent by the positioning server, the position information is used to indicate the position of the node Nv, i , according to the position of the node Nu, i and the position of the node Nv, i position, the distance di between node Nu,i and nodeNv,i is calculated.
结合第二方面,在第二方面的第四种可能实现方式中,所述收集模块具体用于:With reference to the second aspect, in a fourth possible implementation manner of the second aspect, the collection module is specifically used for:
接收节点Nv,i发送的位置信息,并接收节点Nu,i发送的Pi,所述位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di。Receive the location information sent by the node Nv, i , and receive the Pi sent by the node Nu, i , the location information is used to indicate the location of the node Nv, i , according to the location of the node Nu, i and the node Nv , the position of i , calculate the distance d i between node Nu,i and nodeNv,i .
结合第二方面,在第二方面的第五种可能实现方式中,所述收集模块具体用于:With reference to the second aspect, in a fifth possible implementation manner of the second aspect, the collection module is specifically configured to:
接收定位服务器发送的节点Nv,i的位置信息和Pi,所述位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di。Receive the position information and Pi of the node Nv, i sent by the positioning server, the position information is used to indicate the position of the node Nv, i , according to the position of the node Nu, i and the position of the node Nv, i , calculate Distance d i between node Nu,i and nodeNv,i .
结合第二方面,在第二方面的第六种可能实现方式中,所述收集模块具体用于:With reference to the second aspect, in a sixth possible implementation manner of the second aspect, the collection module is specifically used for:
接收定位服务器发送的节点Nv,i的位置信息,并接收节点Nv,i发送的Pi,所述位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di。Receive the location information of the node Nv, i sent by the positioning server, and receive the Pi sent by the node Nv, i, the location information is used to indicate the location of the node Nv, i , according to the location of the node Nu, i and The position of the node Nv ,i, the distance di between the node Nu,i and the node Nv,i is calculated.
结合第二方面,在第二方面的第七种可能实现方式中,所述收集模块具体用于:With reference to the second aspect, in a seventh possible implementation manner of the second aspect, the collection module is specifically used for:
接收定位服务器发送的节点Nv,i的位置信息,并接收节点Nu,i发送的Pi,所述位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di。Receive the position information of the node Nv, i sent by the positioning server, and receive the Pi sent by the node Nu, i, the position information is used to indicate the position of the node Nv, i , according to the position and The position of the node Nv ,i, the distance di between the node Nu,i and the node Nv,i is calculated.
结合第二方面,在第二方面的第八种可能实现方式中,所述信道模型公式为
其中,d0表示已测量的节点N1,0与节点N2,0之间的参考距离,P0表示节点N1,0与节点N2,0之间的参考信号强度,n表示信道衰减参数,
所述修正模块用于:The correction module is used for:
根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的参考信号强度P0’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected reference signal strength P0 ':

根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的信道衰减参数n’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected channel attenuation parameter n':

根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的均方差σ’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected mean square error σ':

根据P0’、n’和σ’,得到修正后的信道模型公式

采用滤波平滑算法,对P0、n、σ、P0’、n’和σ’进行平滑处理,得到P0”、n”和σ”,根据P0”、n”和σ”得到修正后的信道模型公式

结合第二方面,在第二方面的第九种可能实现方式中,所述信道模型公式为
其中,d0表示已测量的节点N1,0与节点N2,0之间的参考距离,P0表示节点N1,0与节点N2,0之间的参考信号强度,α表示信道衰减参数,
所述修正模块用于:The correction module is used for:
根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的参考信号强度P0’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected reference signal strength P0 ':

根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的信道衰减参数α’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected channel attenuation parameter α':

根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的均方差σ’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected mean square error σ':

根据P0’、α’和σ’,得到修正后的信道模型公式

采用滤波平滑算法,对P0、α、σ、P0’、α’和σ’进行平滑处理,得到P0”、α”和σ”,根据P0”、α”和σ”得到修正后的信道模型公式

结合第二方面,在第二方面的第十种可能实现方式中,所述信道模型公式为
其中,α表示第一加权参数,b表示第二加权参数,变量d表示节点Nu与节点Nv之间的距离,c为电磁波速率,变量Pt表示节点Nu与节点Nv之间的信号传播时间,
所述修正模块用于:The correction module is used for:
根据m组定位结果数据中的距离和信号传播时间,采用以下公式,计算修正后的第一加权参数α’:According to the distance and signal propagation time in the m groups of positioning result data, the following formula is used to calculate the revised first weighting parameter α':

根据m组定位结果数据中的距离和信号传播时间,采用以下公式,计算修正后的第二加权参数b’:According to the distance and signal propagation time in the m groups of positioning result data, the following formula is used to calculate the revised second weighting parameter b':

根据m组定位结果数据中的距离和信号传播时间,采用以下公式,计算修正后的均方差σ’:According to the distance and signal propagation time in the m groups of positioning result data, the following formula is used to calculate the corrected mean square error σ':

根据a’、b’和σ’,得到修正后的信道模型公式

采用滤波平滑算法,对a、b、σ、a’、b’和σ’进行平滑处理,得到a”、b”和σ”,根据a”、b”和σ”得到修正后的信道模型公式

结合第二方面的任一种可能实现方式,在第二方面的第十一种可能实现方式中,所述滤波平滑算法为S”=x*S+(1-x)*S’;With reference to any possible implementation manner of the second aspect, in an eleventh possible implementation manner of the second aspect, the filtering and smoothing algorithm is S"=x*S+(1-x)*S';
其中,S表示原始参数,S’表示对S进行修正后得到的修正参数,S”表示对S和S’进行平滑处理后得到的参数,x表示加权系数,x为[0,1)范围内的数;Among them, S represents the original parameter, S' represents the correction parameter obtained after correcting S, S" represents the parameter obtained after smoothing S and S', x represents the weighting coefficient, and x is in the range of [0, 1) the number of;
或者,所述滤波平滑算法为
其中,j表示修正次数,S表示原始参数,S(j-i+1)’表示在第j-i+1次对S进行修正后得到的修正参数,S(j)”表示在第j次修正时进行平滑处理后得到的参数,x表示加权系数,xi为[0,1)范围内的数,且
第三方面,提供了一种信道模型公式修正设备,所述信道模型公式修正设备包括:接收器、发射器、存储器和处理器,所述接收器、所述发射器和所述存储器分别与所述处理器连接,所述存储器存储有程序代码,所述处理器用于调用所述程序代码,执行以下操作:In a third aspect, a channel model formula correction device is provided, the channel model formula correction device includes: a receiver, a transmitter, a memory, and a processor, the receiver, the transmitter, and the memory are respectively associated with the The processor is connected, the memory stores a program code, and the processor is used to call the program code to perform the following operations:
收集m组定位结果数据,其中,第i组定位结果数据包括节点Nu,i与节点Nv,i之间的距离di和信号传播特征Pi,di和Pi是根据信道模型公式及节点Nu,i的位置对节点Nv,i进行定位后得到的,所述信道模型公式用于表示信号传播特征与距离的关联关系,i表示定位次数,i=1,2...m,u和v表示节点编号;Collect m groups of positioning result data, wherein, the i-th group of positioning result data includes the distance di between the node Nu, i and the node Nv, i and the signal propagation characteristic Pi , di and Pi are based on the channel model formula and the position of node Nu, i are obtained after locating node Nv, i , the channel model formula is used to represent the relationship between signal propagation characteristics and distance, i represents the number of positioning times, i=1, 2... m, u and v represent node numbers;
根据m组定位结果数据中的距离和信号传播特征对所述信道模型公式进行修正,得到修正后的信道模型公式。The channel model formula is modified according to the distance and signal propagation characteristics in the m groups of positioning result data to obtain the modified channel model formula.
结合第三方面,在第三方面的第一种可能实现方式中,所述信道模型公式修正设备为用户设备或者服务器。With reference to the third aspect, in a first possible implementation manner of the third aspect, the channel model formula correction device is a user equipment or a server.
本发明实施例提供的技术方案带来的有益效果是:The beneficial effects brought by the technical solutions provided in the embodiments of the present invention are:
本发明实施例提供的方法、装置及设备,通过收集多组定位结果数据,从而根据多组定位结果数据和信道模型公式,对信道模型公式进行修正,得到修正后的信道模型公式,能够在无线信号的传播环境发生变化时及时对信道模型公式进行修正,提高了定位精度。The method, device and device provided by the embodiments of the present invention, by collecting multiple sets of positioning result data, modify the channel model formula according to the multiple sets of positioning result data and the channel model formula, and obtain the corrected channel model formula, which can be used in wireless When the propagation environment of the signal changes, the channel model formula is corrected in time, which improves the positioning accuracy.
附图说明Description of drawings
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。In order to illustrate the technical solutions in the embodiments of the present invention more clearly, the following briefly introduces the accompanying drawings used in the description of the embodiments. Obviously, the accompanying drawings in the following description are only some embodiments of the present invention. For those of ordinary skill in the art, other drawings can also be obtained from these drawings without creative effort.
图1是本发明实施例提供的一种定位系统的结构示意图;1 is a schematic structural diagram of a positioning system provided by an embodiment of the present invention;
图2是本发明实施例提供的一种定位系统的结构示意图;2 is a schematic structural diagram of a positioning system provided by an embodiment of the present invention;
图3是本发明实施例提供的一种信道模型公式修正方法的流程图;3 is a flowchart of a method for correcting a channel model formula provided by an embodiment of the present invention;
图4是本发明实施例提供的操作流程示意图;4 is a schematic diagram of an operation flow provided by an embodiment of the present invention;
图5是本发明实施例提供的操作流程示意图;5 is a schematic diagram of an operation flow provided by an embodiment of the present invention;
图6是本发明实施例提供的操作流程示意图;6 is a schematic diagram of an operation flow provided by an embodiment of the present invention;
图7是本发明实施例提供的操作流程示意图;7 is a schematic diagram of an operation flow provided by an embodiment of the present invention;
图8是本发明实施例提供的一种信道模型公式修正设备的结构示意图。FIG. 8 is a schematic structural diagram of a device for correcting a channel model formula provided by an embodiment of the present invention.
具体实施方式Detailed ways
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
图1是本发明实施例提供的一种定位系统的结构示意图。参见图1,该定位系统包括:至少一个盲节点、锚节点和修正服务器,锚节点的位置已知,而盲节点的位置未知,盲节点可以向锚节点发送无线信号,或者接收锚节点发送的无线信号。至少一个盲节点与修正服务器通过网络连接。FIG. 1 is a schematic structural diagram of a positioning system provided by an embodiment of the present invention. Referring to FIG. 1 , the positioning system includes: at least one blind node, an anchor node and a correction server. The location of the anchor node is known, but the location of the blind node is unknown. The blind node can send wireless signals to the anchor node, or receive data sent by the anchor node. wireless signal. At least one blind node is connected to the correction server through a network.
其中,该信道模型公式用于表示信号传播特征与距离的关联关系,已知信号传播特征后,即可根据该信道模型公式计算对应的距离。The channel model formula is used to represent the relationship between the signal propagation characteristics and the distance. After the signal propagation characteristics are known, the corresponding distance can be calculated according to the channel model formula.
以节点Nu表示锚节点,以节点Nv表示盲节点,u和v表示节点编号,当要对节点Nv进行定位时,可以获取节点Nv与节点Nu之间的信号传播特征Pr,之后根据预先获取的信道模型公式和该信号传播特征Pr,计算该节点Nu与该节点Nv之间的距离d,从而根据该节点Nu的位置和计算出的距离d,估计出节点Nv的位置。The anchor node is represented by node Nu , the blind node is represented by node Nv , and u and v are the node numbers. When the node Nv is to be located, the signal propagation feature Pr between the node Nv and the node Nu can be obtained. , and then calculate the distance d between the node Nu and the node Nv according to the pre- acquired channel model formula and the signal propagation characteristic Pr , so as to estimate the distance d according to the position of the node Nuand the calculated distance d The location of node Nv .
进一步地,该信号传播特征可以为信号强度或者信号传播时间,节点Nu与该节点Nv之间的信号强度Pr是指节点Nu与该节点Nv之间传播的无线信号的信号强度。节点Nu与该节点Nv之间的信号传播时间Pt是指无线信号从节点Nu和该节点Nv中的发射方到接收方传播的时间。Further, the signal propagation characteristic may be signal strength or signal propagation time, and the signal strengthPr between the node Nu and the node Nvrefersto the signal strength of the wireless signal propagated between the nodeNu and the nodeNv . . The signal propagation time Pt between the node Nu and the node Nv refers to the time for the wireless signal to propagate from the node Nu and the transmitter in the node Nv to the receiver.
在本发明实施例中,为了避免在无线传播环境发生变化时降低定位精度,设置了修正服务器,用于对信道模型公式进行修正。In the embodiment of the present invention, in order to avoid reducing the positioning accuracy when the wireless propagation environment changes, a correction server is set up to correct the channel model formula.
该修正服务器用于收集m组定位结果数据,根据m组定位结果数据中的距离和信号传播特征对信道模型公式进行修正,得到修正后的信道模型公式。其中,第i组定位结果数据包括节点Nu,i与节点Nv,i之间的距离di和信号传播特征Pi,di和Pi是根据信道模型公式及节点Nu,i的位置对节点Nv,i进行定位后得到的,i表示定位次数,i=1,2...m,u和v表示节点编号。The correction server is used for collecting m groups of positioning result data, and correcting the channel model formula according to the distance and signal propagation characteristics in the m groups of positioning result data to obtain the corrected channel model formula. Among them, the i-th group of positioning result data includes the distance di between the node Nu, i and the node Nv, i and the signal propagation characteristics Pi , di and Pi are based on the channel model formula and the node Nu, i The position is obtained after locating the nodes Nv, i , i represents the number of times of locating, i=1, 2...m, u and v represent the node numbers.
在实际应用中,任一节点Nv,i可以根据信道模型公式和节点Nu,i的位置进行定位,定位完成时,可以将获取到的di和Pi上传至修正服务器,修正服务器接收节点Nv,i发送的di和Pi。m次定位之后,修正服务器即可收集m组定位结果数据,从而对信道模型公式进行修正。或者,节点Nv,i也可以将估计出的位置信息和Pi上传至修正服务器,该位置信息用于指示节点Nv,i的位置,由修正服务器接收节点Nv,i发送的位置信息和Pi,根据节点Nu,i和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di。m次定位之后,修正服务器即可收集m组定位结果数据,从而对信道模型公式进行修正。In practical applications, any node Nv, ican be positioned according to the channel model formula and the position of the node Nu, i . When the positioning is completed, the obtained di and Pi can be uploaded to the correction server, and the correction server receives di and P i sent by node Nv,i . After m times of positioning, the correction server can collect m groups of positioning result data, so as to modify the channel model formula. Alternatively, the node Nv,i can also upload the estimated position information and Pi to the correction server, the position information is used to indicate the position of the node Nv, i , and the correction server receives the position information sent by the node Nv, i . and Pi , according to the positions of node Nu,i and nodeNv,i , calculate the distance d i between node Nu,i and nodeNv,i . After m times of positioning, the correction server can collect m groups of positioning result data, so as to modify the channel model formula.
另外,上述实施例仅是以定位过程中节点Nv,i作为无线信号的接收方,而节点Nu,i作为无线信号的发送方为例,也即是由节点Nv,i来测量Pi,而在另一实施例中,节点Nv,i可以作为无线信号的发送方,而节点Nu,i作为无线信号的接收方,则节点Nu,i测量Pi后,可以向定位服务器发送Pi,由定位服务器向修正服务器发送Pi。或者,节点Nu,i测量Pi后,可以向修正服务器发送Pi,修正服务器可以接收节点Nu,i发送的Pi。In addition, the above embodiment only takes the node Nv, i as the receiver of the wireless signal and the node Nu, i as the sender of the wireless signal in the positioning process as an example, that is, the node Nv, i measures Pi , and in another embodiment, the node Nv,i can be the transmitter of the wireless signal, and the node Nu,i can be the receiver of the wireless signal, then the node Nu,i can measurePi , The server sends Pi , and the positioning server sends Pi to the correction server. Alternatively, after the node Nu,i measuresPi , it can send Pi to the correction server, and the correction server can receive thePi sent by the node Nu,i .
上述图1所示的定位系统采用了分布式定位的方式,由每个盲节点自己根据测量信息计算自己的位置。而在另一种可能实现方式中,还可以采用集中式定位的方式,由定位服务器统一对盲节点进行定位,具体详见下一实施例。The positioning system shown in FIG. 1 above adopts a distributed positioning method, and each blind node calculates its own position according to the measurement information. In another possible implementation manner, a centralized positioning method may also be adopted, and the positioning server may uniformly locate the blind nodes. For details, please refer to the next embodiment.
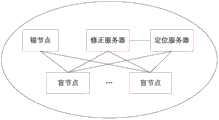
图2是本发明实施例提供的一种定位系统的结构示意图。参见图2,该定位系统包括:至少一个盲节点、锚节点、定位服务器和修正服务器,盲节点可以向锚节点发送无线信号,或者接收锚节点发送的无线信号,至少一个盲节点与修正服务器通过网络连接,定位服务器与修正服务器也可以通过网络连接,或者,定位服务器与修正服务器可以位于同一服务器中,即定位服务器和修正服务器为同一服务器上的不同功能模块。而锚节点可以与修正服务器通过网络连接,也可以不连接,且锚节点可以与定位服务器通过网络连接,也可以不连接。FIG. 2 is a schematic structural diagram of a positioning system provided by an embodiment of the present invention. Referring to FIG. 2, the positioning system includes: at least one blind node, an anchor node, a positioning server and a correction server, the blind node can send wireless signals to the anchor node, or receive wireless signals sent by the anchor node, at least one blind node and the correction server pass through For network connection, the positioning server and the correction server can also be connected through a network, or the positioning server and the correction server can be located in the same server, that is, the positioning server and the correction server are different function modules on the same server. The anchor node may or may not be connected to the correction server through a network, and the anchor node may or may not be connected to the positioning server through a network.
以节点Nu表示锚节点,以节点Nv表示盲节点,当要对节点Nv进行定位时,节点Nv可以向定位服务器上传测量到的节点Nv与节点Nu之间的信号传播特征Pr,定位服务器获取信号传播特征Pr,之后根据预先获取的信道模型公式和该信号传播特征Pr,计算该节点Nv与节点Nu之间的距离,从而根据该节点Nu的位置和计算出的距离d,估计出节点Nv的位置。The anchor node is represented by the node Nu , and the blind node is represented by the node Nv . When the node Nv is to be located, the node Nv can upload the measured signal propagation characteristics between the node Nv and the node Nu to the positioning server. Pr , the positioning server obtains the signal propagation featurePr , and then calculates the distance between the node Nv and the node Nu according to the pre-acquired channel model formula and the signal propagation feature Pr , so that according to the position of the node Nu and the calculated distance d, the position of the node Nv is estimated.
在本发明实施例中,为了避免在无线传播环境发生变化时降低定位精度,设置了修正服务器,用于对信道模型公式进行修正。In the embodiment of the present invention, in order to avoid reducing the positioning accuracy when the wireless propagation environment changes, a correction server is set up to correct the channel model formula.
在实际应用中,每当定位服务器计算出任一节点Nv,i的定位结果数据di和Pi时,可以将获取到的di和Pi上传至修正服务器,修正服务器接收定位服务器发送的di和Pi。m次定位之后,修正服务器即可收集m组定位结果数据,从而对信道模型公式进行修正。In practical applications, whenever the positioning server calculates the positioning result data di and Pi of any node Nv, i , the obtained di and Pi can be uploaded to the correction server, and the correction server receives the data sent by the positioning server. di and Pi . After m times of positioning, the correction server can collect m groups of positioning result data, so as to modify the channel model formula.
需要说明的是,在同一定位系统中,分布式定位和集中式定位的方式可以混合存在。修正服务器既能够收集分布式定位的盲节点的估计位置或距离以及对应的信号传播特征,也能够收集定位服务器进行集中式定位得到的估计位置或距离以及对应的信号传播特征。而且,如果修正服务器支持位置估计,也可以收集盲节点测量得到的信号传播特征,并估计盲节点的位置,计算出盲节点与锚节点之间的距离,从而得到定位结果数据。It should be noted that, in the same positioning system, distributed positioning and centralized positioning may coexist. The correction server can not only collect the estimated positions or distances of blind nodes in distributed positioning and the corresponding signal propagation characteristics, but also can collect the estimated positions or distances obtained by the centralized positioning of the positioning server and the corresponding signal propagation characteristics. Moreover, if the correction server supports position estimation, the signal propagation characteristics measured by the blind nodes can also be collected, the positions of the blind nodes can be estimated, and the distance between the blind node and the anchor node can be calculated to obtain the positioning result data.
图3是本发明实施例提供的一种信道模型公式修正方法的流程图。该发明实施例的执行主体为修正服务器,参见图3,该方法包括:FIG. 3 is a flowchart of a method for correcting a channel model formula provided by an embodiment of the present invention. The execution body of the embodiment of the invention is a correction server. Referring to FIG. 3 , the method includes:
301、收集m组定位结果数据。301. Collect m groups of positioning result data.
本发明实施例中,可以为定位区域确定信道模型公式,该信道模型公式用于表示信号传播特征与距离的关联关系,根据该信道模型公式可以对任一未知位置的节点Nv,i进行定位。相应的,定位结果数据包括该定位区域内的节点Nv,i与节点Nu,i之间的距离di和信号传播特征Pi。其中,节点Nu,i可以为该定位区域内任一已知位置的节点,本发明实施例对该节点Nu,i也不做限定。其中,u和v表示节点编号,i表示定位次数,i=1,2...m,每次定位时采用的节点Nu,i和节点Nv,i可以相同,也可以不同,本发明实施例对此也不做限定。In the embodiment of the present invention, a channel model formula can be determined for the positioning area, and the channel model formula is used to represent the correlation between the signal propagation characteristics and the distance. According to the channel model formula, any unknown position node Nv, i can be located. . Correspondingly, the positioning result data includes the distance di between the node Nv, iand the node Nu, i in the positioning area and the signal propagation characteristic Pi . The node Nu,i may be a node at any known position in the positioning area, and the embodiment of the present invention does not limit the node Nu,i . Among them,u andv represent the node number, i represents the number of positioning, i=1, 2... The embodiment also does not limit this.
另外,该信号传播特征Pi可以为信号强度Pri或者信号传播时间Pti,节点Nv,i与节点Nu,i之间的信号强度Pri是指盲节点与锚节点之间传播的无线信号的信号强度。节点Nv,i与节点Nu,i之间的信号传播时间Pti是指无线时间从节点Nv,i和节点Nu,i中的发射方到接收方传播的时间。其中,在对节点Nv,i进行定位的过程中,节点Nv,i可以作为发射节点,节点Nu,i作为接收节点,节点Nv,i向节点Nu,i发送无线信号,或者,节点Nv,i可以作为接收节点,节点Nu,i作为发射节点,节点Nu,i向节点Nv,i发送无线信号。本发明实施例对此不做限定。In addition, the signal propagation characteristic Pi may be the signal strength Pri or the signal propagation time Pti , the signal strength P ri between the node Nv,i and the node Nu,i refers to the signal strength Pri propagated between the blind node and the anchor node The signal strength of the wireless signal. The signal propagation time Pti between node N v,i and node Nu,i refers to the time that the wireless time travels from the transmitter to the receiver in node Nv,i and node Nu,i . Wherein, in the process of locating the nodes N v,i , the nodes Nv, i can be used as transmitting nodes, the nodes Nu, i can be used as the receiving nodes, the nodes Nv, i can send wireless signals to the nodes Nu, i , or , the node Nv, i can be used as a receiving node, the node Nu, i can be used as a transmitting node, and the node Nu, i can send wireless signals to the node Nv, i . This embodiment of the present invention does not limit this.
节点Nv,i向节点Nu,i发送无线信号时,该信号强度Pri是节点Nu,i测量到的节点Nv,i所发送信号的信号强度,该信号传播时间Pti是无线信号从节点Nv,i到节点Nu,i传播的时间;节点Nu,i向节点Nv,i发送无线信号时,该信号强度Pri是节点Nv,i测量到的节点Nu,i所发送信号的信号强度,该信号传播时间Pti是无线信号从节点Nu,i到节点Nv,i传播的时间。When the node Nv,i sends a wireless signal to the node N u, i , the signal strength Pri is the signal strength of the signal sent by the node Nv,i measured by the node N u, i , and the signal propagation time Pti is the wireless signal strength. Signal propagation time from node Nv, i to node Nu, i ; when node Nu,i sends wireless signal to node N v, i , the signal strength Pri is the node Nu measured by node Nv, i, the signal strength of the signal sent by i , the signal propagation time Pti is the propagation time of the wireless signal from node Nu, i to node Nv, i .
需要说明的是,本发明实施例仅是根据节点Nu,i与节点Nv,i之间的信号传播特征进行处理,而不限定无线信号由节点Nu,i发送给节点Nv,i,还是由节点Nv,i发送给节点Nu,i。It should be noted that the embodiment of the present invention only performs processing according to the signal propagation characteristics between the node Nu,i and the nodeNv,i , and does not limit the wireless signal sent by the node Nu,i to the nodeNv,i , is still sent by node Nv,i to node Nu,i .
本发明实施例中,由于在定位区域内物品的移动、人的运动等多种因素都会造成无线信号的传播环境发生变化,而无线信号的传播环境发生变化时,信道模型公式也应当变化,否则会导致原始的信道模型公式不能准确表示变化后传播环境下的信号传播特征与距离的关联关系,如果仍采用原始的信道模型公式进行定位,会降低定位精度。In the embodiment of the present invention, various factors such as the movement of items and the movement of people in the positioning area will cause the propagation environment of the wireless signal to change, and when the propagation environment of the wireless signal changes, the channel model formula should also change. As a result, the original channel model formula cannot accurately represent the relationship between the signal propagation characteristics and the distance in the changed propagation environment. If the original channel model formula is still used for positioning, the positioning accuracy will be reduced.
考虑到定位区域内的传播环境发生变化时,通常是渐变的,环境变化所导致的变化会直接体现在定位结果数据中,即定位结果数据可以体现当前传播环境下信号传播特征与距离的关联关系,因此可以在根据该信道模型公式进行定位的过程中,收集多组定位结果数据,根据该多组定位结果数据,对信道模型公式进行修正。Considering that when the propagation environment in the positioning area changes, it is usually gradual, and the changes caused by the environmental changes will be directly reflected in the positioning result data, that is, the positioning result data can reflect the relationship between the signal propagation characteristics and the distance under the current propagation environment. Therefore, in the process of positioning according to the channel model formula, multiple sets of positioning result data can be collected, and the channel model formula can be modified according to the multiple sets of positioning result data.
针对第i次定位,定位结果数据包括节点Nv,i与节点Nu,i之间的距离di和信号传播特征Pi,收集节点Nv,i的定位结果数据的过程可以包括以下几种情况:For the i-th positioning, the positioning result data includes the distance di between the node Nv, i and the node Nu, i and the signal propagation feature Pi , and the process of collecting the positioning result data of the node Nv, i can include the following: case:
第一种情况:节点Nv,i在定位完成后将获取到的定位结果数据di和Pi发送给该修正服务器,由该修正服务器接收节点Nv,i发送的di和Pi,并存储di和Pi。The first case: the node Nv,i sends the obtained positioning result data di and Pi to the correction server after the positioning is completed, and the correction server receives the di and P i sent by the node Nv,i , and store di and Pi .
第二种情况:由定位服务器集中进行定位时,由定位服务器在定位完成后将di和Pi发送给该修正服务器,由该修正服务器接收定位服务器发送的di和Pi,并存储距离di和信号传播特征Pi。The second case: when the positioning server performs centralized positioning, the positioning server sends di and Pi to the correction server after the positioning is completed, and the correction server receives the di and Pi sent by the positioning server, and stores the distance. di and signal propagation characteristics Pi .
第三种情况:节点Nv,i在定位完成后向修正服务器发送节点Nv,i的位置信息和Pi,该位置信息用于指示节点Nv,i的位置。该修正服务器接收节点Nv,i发送的位置信息和Pi,并根据节点Nv,i的位置和节点Nu,i的位置,计算节点Nv,i与节点Nu,i之间的距离,从而得到di和Pi。The third case: the node Nv,i sends the position information and Pi of the node Nv, i to the correction server after the positioning is completed, and the position information is used to indicate the position of the node Nv, i . The correction server receives the position information and Pi sent by the node Nv, i, and calculates the distance between the node N v, i and the node Nu, i according to the position of the node Nv, i and the position of the node Nu, i distance to obtain di and Pi .
第四种情况:由定位服务器集中进行定位时,节点Nv,i在定位完成后向修正服务器发送节点Nv,i的位置信息。定位服务器向修正服务器发送Pi,该修正服务器接收节点Nv,i发送的位置信息,并接收定位服务器发送的Pi,并根据节点Nv,i的位置和节点Nu,i的位置,计算节点Nv,i与节点Nu,i之间的距离,从而得到di和Pi。The fourth case: when the positioning server performs centralized positioning, the node Nv, i sends the position information of the node Nv, i to the correction server after the positioning is completed. The positioning server sends Pi to the correction server, the correction server receives the position information sent by the node Nv, i , and receives the Pi sent by the positioning server, and according to the position of the node Nv, i and the position of the node Nu, i , The distance between node Nv,i and node Nu,i is calculated, resulting in di and Pi .
第五种情况:节点Nv,i在定位完成后向修正服务器发送节点Nv,i的位置信息,节点Nu,i向修正服务器发送定位时测量的Pi,该修正服务器接收节点Nv,i发送的位置信息,并接收节点Nu,i发送的Pi,并根据节点Nv,i的位置和节点Nu,i的位置,计算节点Nv,i与节点Nu,i之间的距离di,从而得到di和Pi。The fifth situation: Node Nv, i sends the location information of node Nv, i to the correction server after positioning is completed, and node Nu, i sends Pi measured during positioning to the correction server, and the correction server receives node Nv , position information sent by i , and receive Pi sent by node Nu,i , and calculate the difference between node N v, i and node N u, i according to the position of node Nv, i and the position of node Nu, i The distance di between , thus obtains di and Pi .
第六种情况:由定位服务器集中进行定位时,定位服务器在定位得到节点Nv,i的位置信息和Pi,向修正服务器发送节点Nv,i的位置信息和Pi。修正服务器接收定位服务器发送的节点Nv,i的位置信息和Pi,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di,从而得到di和Pi。The sixth case: when the positioning server performs centralized positioning, the positioning server obtains the position information and P i of the node Nv , i during the positioning, and sends the position information and Pi of the node Nv, ito the correction server. The correction server receives the position information and Pi of the node Nv, i sent by the positioning server, and calculates the distance between the node Nu , i and the node Nv, i according to the position of the node Nu, i and the position of the node Nv, i the distance di , thereby obtaining di and Pi .
第七种情况:由定位服务器集中进行定位时,定位服务器在定位得到节点Nv,i的位置信息后发送给修正服务器,节点Nv,i向修正服务器发送Pi,则修正服务器接收定位服务器发送的节点Nv,i的位置信息,并接收节点Nv,i发送的Pi,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di,从而得到di和Pi。The seventh situation: when the positioning server performs centralized positioning, the positioning server obtains the position information of the node Nv, i after positioning and sends it to the correction server, and the node Nv, i sends Pi to the correction server, then the correction server receives the positioning server. Send the position information of node Nv, i , and receive Pi sent by node Nv, i, according to the position of node Nu, i and the position of node Nv, i , calculate node Nu, i and node Nv , the distance di between i , thus obtaining di and Pi .
第八种情况:由定位服务器集中进行定位时,定位服务器在定位得到节点Nv,i的位置信息后发送给修正服务器,节点Nu,i向修正服务器发送Pi,则修正服务器接收定位服务器发送的节点Nv,i的位置信息,并接收节点Nu,i发送的Pi,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di,从而得到di和Pi。The eighth situation: when the positioning server performs centralized positioning, the positioning server obtains the position information of the node Nv, i and sends it to the correction server after positioning, and the node Nu, i sends Pi to the correction server, and the correction server receives the positioning server. Send the position information of node Nv, i , and receive Pi sent by node Nu , i, according to the position of node Nu, i and the position of node Nv, i , calculate node Nu, i and node Nv , the distance di between i , thus obtaining di and Pi .
需要说明的是,本发明实施例仅是以上述几种收集方式为例进行说明,但并不对该修正服务器收集定位结果数据的方式构成限定。It should be noted that the embodiments of the present invention only take the foregoing several collection manners as examples for description, but do not limit the manner in which the correction server collects the positioning result data.
在实际应用中,修正服务器根据定位时估算的节点Nv,i位置和已知的节点Nu,i的位置计算节点Nv,i与节点Nu,i之间的距离di,所计算出的距离di与节点Nv,i与节点Nu,i之间的实际距离ri的关系为:
进一步地,定位结果数据的数目m越多,修正结果的准确率越高,因此,在步骤301之后,步骤302之前,该方法还可以包括:修正服务器先获取定位结果数据的数目,判断该数目是否已达到预设阈值,如果该数目已达到预设阈值,即m等于预设阈值时,则进行修正,如果该数目未达到预设阈值,则继续收集定位结果数据,待收集的定位结果数据的数目达到预设阈值后,即收集到预设阈值组定位结果数据后,再进行修正,以保证修正结果的准确率。该预设阈值可以由技术人员在开发时设置,也可以由该修正服务器默认设置,本发明实施例对此不作限定。Further, the more the number m of the positioning result data, the higher the accuracy of the correction result. Therefore, after
302、根据m组定位结果数据中的距离和信号传播特征对信道模型公式进行修正,得到修正后的信道模型公式。302. Modify the channel model formula according to the distance and signal propagation characteristics in the m groups of positioning result data, to obtain a modified channel model formula.
本发明实施例中,该信道模型公式中包含至少一项参数、距离变量和信号传播特征变量,该至少一项参数可以为参考信号强度、参考信号传播时间等,对该信道模型公式进行修正时需要对该信道模型公式中的至少一项参数进行修正。修正过程中,该修正服务器可以将m组定位结果数据作为已知量,根据该信道模型公式,采用最小均方误差准则或者其他统计方法,推导出用于计算参数的公式,根据该m组定位结果数据并采用推导出的公式,计算出至少一项新的参数。In this embodiment of the present invention, the channel model formula includes at least one parameter, a distance variable, and a signal propagation characteristic variable, and the at least one parameter may be a reference signal strength, a reference signal propagation time, etc., when the channel model formula is revised At least one parameter in the channel model formula needs to be corrected. During the correction process, the correction server can take m groups of positioning result data as known quantities, and according to the channel model formula, use the minimum mean square error criterion or other statistical methods to derive formulas for calculating parameters, and use the m groups of positioning The resulting data and the derived formula are used to calculate at least one new parameter.
可选地,信道模型公式可以为以下三种的任一种:Optionally, the channel model formula can be any of the following three:
第一种:信道模型公式为
其中,d0表示已测量的节点N1,0与节点N2,0之间的参考距离,P0表示节点N1,0与节点N2,0之间的参考信号强度,n表示信道衰减参数,
节点N1,0和节点N2,0是指定位区域中用于进行测量的节点,可以由测量人员选择,也可以自动从已知位置的节点中进行选择。对节点N1,0和节点N2,0之间的距离以及之间传播的无线信号进行测量,可以得到节点N1,0与节点N2,0之间的参考距离d0和参考信号强度P0,从而得到该信道模型公式。Node N1,0 and Node N2,0 are nodes in the designated bit area for making measurements, which can be selected by the surveyor or automatically selected from nodes with known locations. By measuring the distance between node N1,0 and node N 2,0 and the wireless signal propagating between them, the reference distance d0 and reference signal strength between node N1 , 0 and node N2 , 0 can be obtained P0 , thereby obtaining the channel model formula.
第二种:信道模型公式为
其中,d0表示已测量的节点N1,0与节点N2,0之间的参考距离,P0表示节点N1,0与节点N2,0之间的参考信号强度,α表示信道衰减参数,
第三种:信道模型公式为
其中,α表示第一加权参数,b表示第二加权参数,变量d表示节点Nu与节点Nv之间的距离,c为电磁波速率,变量Pt表示节点Nu与节点Nv之间的信号传播时间,
需要说明的是,在获取信道模型公式时所测量的节点N1,0与节点N2,0与定位时的节点Nu与节点Nv位于同一定位区域内。实际应用时,可以将该节点N1,0与节点N2,0中的任一节点作为节点Nu,即锚节点,基于节点Nu对未知位置的任一节点Nv进行定位,以提高信道模型公式的准确度。或者,也可以从该定位区域内除该节点N1,0与节点N2,0之外的节点中选取一个节点作为节点Nu,基于节点Nu对未知位置的任一节点Nv进行定位,本发明实施例对此不做限定。It should be noted that the node N1,0 and node N2,0 measured when the channel model formula is obtained are located in the same positioning area as the nodeNu and node Nv during positioning. In practical applications, any one of the node N1,0 and the node N2,0 can be used as the node Nu , that is, the anchor node, and any node Nv at an unknown position can be located based on the node Nu to improve the performance of the node N u . The accuracy of the channel model formulation. Alternatively, it is also possible to select a node from the nodes other than the node N1,0 and node N2,0 in the positioning area as the node Nu , and locate any node Nv at an unknown position based on the node Nu , which is not limited in this embodiment of the present invention.
相应地,针对不同的信道模型公式,进行修正的方式也不同。该步骤302可以包括以下3021-3023中的任一项:Correspondingly, for different channel model formulas, the correction methods are also different. This
3021、针对上述第一种信道模型公式:3021. For the above-mentioned first channel model formula:
1、根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的参考信号强度P0’:1. According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected reference signal strength P0 ':

2、根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的信道衰减参数n’:2. According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected channel attenuation parameter n':

3、根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的均方差σ’:3. According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected mean square error σ':

执行上述步骤1-3之后,该修正服务器可以根据P0’、n’和σ’,得到修正后的信道模型公式

需要说明的是,由于大量零均值随机变量之和趋于零,易证明当m很大时,


3022、针对上述第二种信道模型公式:3022. For the above-mentioned second channel model formula:
1、根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的参考信号强度P0’:1. According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected reference signal strength P0 ':

2、根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的信道衰减参数α’:2. According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected channel attenuation parameter α':

3、根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的均方差σ’:3. According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected mean square error σ':

执行上述步骤1-3之后,该修正服务器可以根据P0’、α’和σ’,得到修正后的信道模型公式

3023、针对上述第三种信道模型公式:3023. For the above-mentioned third channel model formula:
1、根据m组定位结果数据中的距离和信号传播时间,采用以下公式,计算修正后的第一加权参数a’:1. According to the distance and signal propagation time in the m groups of positioning result data, the following formula is used to calculate the revised first weighting parameter a':

2、根据m组定位结果数据中的距离和信号传播时间,采用以下公式,计算修正后的第二加权参数b’:2. According to the distance and signal propagation time in the m groups of positioning result data, the following formula is used to calculate the revised second weighting parameter b':

3、根据m组定位结果数据中的距离和信号传播时间,采用以下公式,计算修正后的均方差σ’:3. According to the distance and signal propagation time in the m groups of positioning result data, the following formula is used to calculate the corrected mean square error σ':

执行上述步骤1-3之后,该修正服务器可以根据α’、b’和σ’,得到修正后的信道模型公式

上述三种信道模型仅是以包含高斯随机变量X为例,而实际上对于确定的信道模型:


需要说明的是,信道模型公式可以有多种,本发明实施例对修正的信道模型公式不作限定。且,每种信道模型公式均可包括多项参数,该修正服务器可以对多个参数中的任一项或多项进行修正,本发明实施例对修正的参数不作限定。It should be noted that there may be multiple channel model formulas, and the modified channel model formula is not limited in this embodiment of the present invention. Moreover, each channel model formula may include multiple parameters, and the modification server may modify any one or more of the multiple parameters, and the modified parameters are not limited in this embodiment of the present invention.
进一步地,进行修正时可以采用预设修正算法,该预设修正算法可以为最大似然算法或者多边形算法等,本发明实施例对此不作限定。Further, a preset correction algorithm may be used for correction, and the preset correction algorithm may be a maximum likelihood algorithm or a polygon algorithm, etc., which is not limited in this embodiment of the present invention.
需要说明的是,上述步骤3021-3023中仅是以对信道模型公式中的参数进行修正以后,根据修正后的参数获取修正后的信道模型公式。而在另一实施例中,由于仅根据m组定位结果数据中的距离和信号强度进行修正可能会出现误差,因此为了提高修正准确率,在根据m组定位结果数据中的距离和信号强度计算出修正后的参数之后,也可以对原始的参数以及修正后的参数进行平滑处理,根据平滑处理后的参数获取修正后的信道模型公式。It should be noted that, in the above steps 3021-3023, the modified channel model formula is only obtained according to the modified parameters after the parameters in the channel model formula are modified. In another embodiment, since errors may occur in the correction based only on the distance and signal strength in the m groups of positioning result data, in order to improve the correction accuracy, the calculation is performed according to the distance and signal strength in the m groups of positioning result data. After the modified parameters are obtained, the original parameters and the modified parameters can also be smoothed, and the modified channel model formula can be obtained according to the smoothed parameters.
例如,针对于上述三种信道模型公式,该步骤302还可以包括:For example, for the above three channel model formulas, step 302 may further include:
第一种、计算得到P0’、n’和σ’后,采用滤波平滑算法,对P0、n、σ、P0’、n’和σ’进行平滑处理,得到P0”、n”和σ”,根据P0”、n”和σ”得到修正后的信道模型公式

第二种、计算得到P0’、α’和σ’后,采用滤波平滑算法,对P0、α、σ、P0’、α’和σ’进行平滑处理,得到P0”、α”和σ”,根据P0”、α”和σ”得到修正后的信道模型公式

第三种、计算得到a’、b’和σ’,采用滤波平滑算法,对a、b、σ、a’、b’和σ’进行平滑处理,得到a”、b”和σ”,根据a”、b”和σ”得到修正后的信道模型公式

进一步地,在一种可能的实现方式中,该滤波平滑算法可以为S”=x*S+(1-x)*S’:Further, in a possible implementation manner, the filtering and smoothing algorithm may be S"=x*S+(1-x)*S':
其中,S表示原始参数,S’表示对S进行修正后得到的修正参数,S”表示对S和S’进行平滑处理后得到的参数,x表示加权系数,x为[0,1)范围内的数,可选地,x=0.5。Among them, S represents the original parameter, S' represents the correction parameter obtained after correcting S, S" represents the parameter obtained after smoothing S and S', x represents the weighting coefficient, and x is in the range of [0, 1) The number of , optionally, x=0.5.
在第二种可能的实现方式中,该滤波平滑算法还可以为
其中,j表示修正次数,S表示原始参数,S(j-i+1)’表示在第j-i+1次对S进行修正后得到的修正参数,S(j)”表示在第j次修正时进行平滑处理后得到的参数,x表示加权系数,xi为[0,1)范围内的数,且
需要说明的第一点是,对于任一信道模型公式的任一项参数,均可以采用步骤上述滤波平滑算法进行平滑处理,本发明实施例对此不作限定。而且,对于同一定位系统,上述两种滤波平滑算法可以混合存在。例如,在定位系统刚启动时,初始的参数通常通过离线测量确定,此时进行修正时可以采用较为复杂的滤波平滑算法,即上述第二种滤波平滑算法,在经过一段时间的修正之后,再采用较为简单的滤波平滑算法,即上述第一种滤波平滑算法。The first point that needs to be explained is that for any parameter of any channel model formula, the filtering and smoothing algorithm described above may be used for smoothing processing, which is not limited in this embodiment of the present invention. Moreover, for the same positioning system, the above two filtering and smoothing algorithms can be mixed. For example, when the positioning system is just started, the initial parameters are usually determined by offline measurement. At this time, a more complex filtering and smoothing algorithm can be used for correction, that is, the second filtering and smoothing algorithm mentioned above. After a period of correction, the A relatively simple filtering and smoothing algorithm, namely the first filtering and smoothing algorithm above, is used.
需要说明的第二点是,一个定位区域内可以设置多个锚节点Nu。如果要根据定位确定的位置估算距离,在传播环境发生变化时,会产生两类偏差:无偏偏差和有偏偏差。The second point that needs to be explained is that multiple anchor nodesNu can be set in one positioning area. If the distance is to be estimated based on the position determined by the positioning, when the propagation environment changes, there will be two types of bias: unbiased bias and biased bias.
其中,无偏偏差会影响估算的结果,但是统计的数学期望没有改变,比如信号强度的均方差变大,但是均值没有变化(如人流量大时,信号波动大,人流量小时信号波动小),因此此类偏差不会影响修正的信道模型参数,计算出来的参数是有参考价值的。Among them, the unbiased deviation will affect the estimation result, but the mathematical expectation of the statistics does not change. For example, the mean square error of the signal strength increases, but the mean value does not change (for example, when the traffic is large, the signal fluctuation is large, and the signal fluctuation is small when the traffic is small) , so this kind of deviation will not affect the corrected channel model parameters, and the calculated parameters are of reference value.
而有偏偏差不仅影响估计的结果,而且影响统计的数学期望,比如锚节点Nu发射功率降低,或者周围环境变化导致信号质量下降,这样会导致定位结果偏离特定的锚节点Nu。根据此类偏差计算的信道模型参数是不准确的。然而由于传播环境是渐变的,即改变的只是部分,这样通过未变化的部分,即其余不受变化影响的锚节点,计算的位置统计值具有一定的准确度,其用于信道模型公式中参数的计算时计算出来的参数会比原来的值更准确。通过反复校正,可不断逼近真正的准确值。The biased deviation not only affects the estimation result, but also affects the mathematical expectation of statistics, such as the decrease of the transmit power of the anchor nodeNu , or the decrease of the signal quality caused by the change of the surrounding environment, which will cause the positioning result to deviate from the specific anchor nodeNu . Channel model parameters calculated from such deviations are inaccurate. However, since the propagation environment is gradual, that is, only part of the change is changed, so through the unchanged part, that is, the rest of the anchor nodes that are not affected by the change, the calculated position statistics have a certain accuracy, which is used for the parameters in the channel model formula. The calculated parameters will be more accurate than the original values. Through repeated calibration, the true accurate value can be continuously approached.
需要说明的第三点是,本发明实施例仅是以一个信道模型公式为例进行说明,而在实际应用中,可以为不同的定位区域获取不同的信道模型公式,相应的,可以采用本发明实施例提供的修正方法,对任一信道模型公式进行修正,本发明实施例对此不作限定。The third point that needs to be explained is that the embodiments of the present invention only take one channel model formula as an example for description, but in practical applications, different channel model formulas can be obtained for different positioning areas. Correspondingly, the present invention can be used. The correction method provided by the embodiment corrects any channel model formula, which is not limited in the embodiment of the present invention.
本发明实施例提供的方法,通过收集多组定位结果数据,从而根据多组定位结果数据和信道模型公式,对信道模型公式进行修正,得到修正后的信道模型公式,能够在无线信号的传播环境发生变化时及时对信道模型公式进行修正,提高了定位精度。进一步地,采用滤波平滑算法进行平滑处理,提高了修正结果的准确率。In the method provided by the embodiment of the present invention, by collecting multiple sets of positioning result data, the channel model formula is modified according to the multiple sets of positioning result data and the channel model formula, and the corrected channel model formula is obtained, which can be used in the propagation environment of wireless signals. When changes occur, the channel model formula is corrected in time, which improves the positioning accuracy. Further, a filtering smoothing algorithm is used for smoothing, which improves the accuracy of the correction result.
上述所有可选技术方案,可以采用任意结合形成本发明的可选实施例,在此不再一一赘述。All the above-mentioned optional technical solutions can be combined arbitrarily to form optional embodiments of the present invention, which will not be repeated here.
上述实施例仅是以修正服务器作为执行主体为例进行说明,实际上,对信道模型公式进行修正的过程还可以由盲节点以及多个服务器协同执行。The above embodiment is only described by taking the revision server as the execution subject as an example. In fact, the process of revising the channel model formula can also be performed by the blind node and multiple servers cooperatively.
可选地,该方法的各个步骤的执行主体可以包括以下几种情况:Optionally, the execution body of each step of the method may include the following situations:
第一种情况:由盲节点进行定位,由第一服务器存储信道模型公式,并对信道模型公式进行修正;也即是,将第一服务器作为修正服务器。The first case: positioning is performed by a blind node, the channel model formula is stored by the first server, and the channel model formula is corrected; that is, the first server is used as a correction server.
参见图4,盲节点要进行定位时,向第一服务器发送参数请求,第一服务器向盲节点返回参数响应,该参数响应携带信道模型公式的至少一项参数,盲节点即可根据获取到的参数确定信道模型公式,根据该信道模型公式进行定位,确定该盲节点的位置。Referring to FIG. 4 , when the blind node wants to locate, it sends a parameter request to the first server, and the first server returns a parameter response to the blind node. The parameter response carries at least one parameter of the channel model formula. The parameters determine a channel model formula, and positioning is performed according to the channel model formula to determine the position of the blind node.
之后,盲节点可以将定位结果数据发送给第一服务器,第一服务器可以收集多组定位结果数据,根据多组定位结果数据计算修正后的参数,从而对信道模型公式进行修正。Afterwards, the blind node can send the positioning result data to the first server, and the first server can collect multiple sets of positioning result data, and calculate the revised parameters according to the multiple sets of positioning result data, thereby revising the channel model formula.
其中,该参数获取请求可以携带盲节点的区域信息、子区域信息、参数类型等信息,本发明实施例对此不作限定。The parameter acquisition request may carry information such as area information, sub-area information, and parameter type of the blind node, which is not limited in this embodiment of the present invention.
参数类型表示要获取到的参数的类型,如参考信号强度、信道衰减参数等。The parameter type indicates the type of the parameter to be obtained, such as reference signal strength, channel attenuation parameter, etc.
区域信息可以为国家ID(Identity,序列号)+省ID+市ID+区域(街道、镇、乡等)ID+建筑物ID。或者,该参数获取请求中也可以不携带区域信息。例如,该参数获取请求需要经过盲节点所在区域的网关进行转发时,第一服务器可以根据通信的网关标识来确定盲节点所在的区域,此时该参数获取请求中无需携带该区域信息。或者,为不同的区域设置不同的第一服务器,一个第一服务器仅负责一个区域时,该参数获取请求中无需携带该区域信息。The area information may be country ID (Identity, serial number)+province ID+city ID+area (street, town, township, etc.) ID+building ID. Alternatively, the parameter acquisition request may not carry the area information. For example, when the parameter acquisition request needs to be forwarded through the gateway of the area where the blind node is located, the first server can determine the area where the blind node is located according to the gateway identifier of the communication, and the parameter acquisition request does not need to carry the area information. Alternatively, different first servers are set for different regions, and when one first server is only responsible for one region, the parameter acquisition request does not need to carry the region information.
子区域信息可以为盲节点的坐标范围、坐标点、锚节点标识等信息,本发明实施例对此不作限定。如果对不同的子区域或者锚节点设置不同的信道模型,则根据该子区域信息可以确定对应的信道模型。The sub-region information may be information such as the coordinate range, coordinate point, and anchor node identifier of the blind node, which is not limited in this embodiment of the present invention. If different channel models are set for different sub-regions or anchor nodes, the corresponding channel model can be determined according to the sub-region information.
第二种情况:由盲节点进行定位,由第一服务器对信道模型公式进行修正,由第二服务器存储信道模型公式。也即是,将第一服务器作为修正服务器。The second case: the blind node performs positioning, the first server modifies the channel model formula, and the second server stores the channel model formula. That is, the first server is used as a correction server.
参见图5,盲节点要进行定位时,向第二服务器发送参数请求,第二服务器向盲节点返回参数响应,该参数响应携带信道模型公式的至少一项参数,盲节点即可根据获取到的参数确定信道模型公式,根据该信道模型公式进行定位,确定该盲节点的位置。Referring to FIG. 5 , when the blind node is to perform positioning, it sends a parameter request to the second server, and the second server returns a parameter response to the blind node. The parameter response carries at least one parameter of the channel model formula. The parameters determine a channel model formula, and positioning is performed according to the channel model formula to determine the position of the blind node.
之后,盲节点可以将定位结果数据发送给第一服务器,第一服务器可以收集多组定位结果数据,根据多组定位结果数据计算修正后的参数。而第二服务器可以实时或者周期性地向第一服务器发送参数更新请求,第一服务器向第二服务器返回参数更新响应,该参数更新响应中携带修正后的参数,第二服务器即可对参数进行更新,存储修正后的参数,以便后续可以将修正后的参数发送给待定位的盲节点。Afterwards, the blind node may send the positioning result data to the first server, and the first server may collect multiple sets of positioning result data, and calculate the revised parameters according to the multiple sets of positioning result data. The second server can send a parameter update request to the first server in real time or periodically, and the first server returns a parameter update response to the second server. The parameter update response carries the revised parameters, and the second server can update the parameters. Update, and store the corrected parameters, so that the corrected parameters can be sent to the blind node to be located later.
其中,第一服务器可以仅计算得到修正后的参数,发送给第二服务器,由第二服务器进行滤波平滑处理。Wherein, the first server may only calculate and obtain the corrected parameters, and send them to the second server, and the second server performs filtering and smoothing processing.
第三种情况:由第二服务器进行定位,由第一服务器存储信道模型公式,并进行修正。也即是,将第一服务器作为修正服务器,将第二服务器作为定位服务器。The third situation: the positioning is performed by the second server, and the channel model formula is stored and corrected by the first server. That is, the first server is used as a correction server, and the second server is used as a positioning server.
参见图6,第三种情况与第一种情况类似,区别仅在于由第二服务器来确定盲节点的位置,并向第一服务器请求修正后的参数,在此不再赘述。Referring to FIG. 6 , the third case is similar to the first case, except that the second server determines the location of the blind node and requests the first server for revised parameters, which will not be repeated here.
第四种情况:由第二服务器进行定位,由第一服务器收集定位结果数据,由第二服务器存储信道模型公式,并根据定位结果数据进行修正。也即是,将第二服务器作为定位服务器,且将第一服务器和第二服务器作为修正服务器,其中第一服务器用于收集数据,第二服务器用于修正。The fourth situation: the second server performs positioning, the first server collects positioning result data, the second server stores the channel model formula, and makes corrections according to the positioning result data. That is, the second server is used as a positioning server, and the first server and the second server are used as correction servers, wherein the first server is used for collecting data and the second server is used for correction.
参见图7,第二服务器根据存储的参数,对盲节点进行定位,得到定位结果数据,向第一服务器发送该定位结果数据。当第一服务器收集到多组定位结果数据后,发送给第二服务器,第二服务器即可根据多组定位结果数据进行修正。之后即可根据修正后的信道模型公式对盲节点进行定位。Referring to FIG. 7 , the second server locates the blind node according to the stored parameters, obtains the location result data, and sends the location result data to the first server. After the first server collects multiple sets of positioning result data, and sends it to the second server, the second server can make corrections according to the multiple sets of positioning result data. Then the blind node can be located according to the revised channel model formula.
第五种情况:由第二服务器进行定位,由第二服务器存储信道模型公式,并收集定位结果数据,对信道模型公式进行修正。也即是,将第一服务器作为定位服务器,将第二服务器作为修正服务器。The fifth situation: the second server performs positioning, the second server stores the channel model formula, collects positioning result data, and corrects the channel model formula. That is, the first server is used as a positioning server, and the second server is used as a correction server.
本发明实施例提供的第一服务器与第二服务器位于同一服务器中。具体地,服务器中可以包括多个功能模块,如用于进行位置估计的定位模块、用于收集定位结果数据的数据模块、用于进行修正的修正模块,数据模块可以将定位结果数据传递给修正模块,修正模块修正得到新的信道模型公式后,定位模块可以根据修正模块修正后的信道模型公式进行定位。The first server and the second server provided by the embodiment of the present invention are located in the same server. Specifically, the server may include a plurality of functional modules, such as a positioning module for performing position estimation, a data module for collecting positioning result data, and a correction module for correction. The data module can transmit the positioning result data to the correction module. After the correction module obtains a new channel model formula, the positioning module can perform positioning according to the channel model formula corrected by the correction module.
当然,除上述几种情况之外,还可以采用其他情况的执行主体来执行本发明实施例提供的步骤,本发明实施例对此不作限定。Certainly, in addition to the above-mentioned situations, execution bodies in other situations may also be used to execute the steps provided in the embodiments of the present invention, which are not limited in the embodiments of the present invention.
实际应用中,可以重新进行离线测量,来修正信道模型公式,但离线测量的工作量非常大,增加了维护成本,如果过于频繁地进行离线测量,将会极大增加定位系统的维护成本,而如果进行离线测量的时间间隔较长,又会导致定位精度下降。In practical applications, offline measurement can be performed again to correct the channel model formula, but the workload of offline measurement is very large, which increases the maintenance cost. If offline measurement is performed too frequently, it will greatly increase the maintenance cost of the positioning system. If the time interval for offline measurement is long, the positioning accuracy will decrease.
或者,还可以在已知位置上部署测量节点,由测量节点来进行测量,测量到的数据可以用于对信道模型公式进行修正。但部署测量节点会大大增加建设成本。若测量节点的数量过多,则增加的建设成本非常高,若测量节点过少,会导致修正不准确,导致定位精度下降。Alternatively, measurement nodes can also be deployed at known positions, the measurement nodes can perform measurements, and the measured data can be used to revise the channel model formula. But deploying measurement nodes will greatly increase the construction cost. If the number of measurement nodes is too large, the increased construction cost will be very high. If there are too few measurement nodes, the correction will be inaccurate and the positioning accuracy will be reduced.
与上述方案相比,本发明实施例所提供的方法,能够解决信道模型公式有效性随环境变化而下降的问题,能够对信道模型公式进行准确的更新,并且避免对定位系统增加太多建设成本和维护成本,显著提高了定位性能。Compared with the above solution, the method provided by the embodiment of the present invention can solve the problem that the validity of the channel model formula decreases with the change of the environment, can accurately update the channel model formula, and avoid increasing too much construction cost to the positioning system. and maintenance costs, significantly improving positioning performance.
图8是本发明实施例提供的一种信道模型公式修正设备的结构示意图,参见图8,该信道模型公式修正设备包括:接收器801、发射器802、存储器803和处理器804,该接收器801、该发射器802和该存储器803分别与该处理器804连接,该存储器803存储有程序代码,该处理器804用于调用该程序代码,执行以下操作:FIG. 8 is a schematic structural diagram of a channel model formula correction device provided by an embodiment of the present invention. Referring to FIG. 8 , the channel model formula correction device includes: a
收集m组定位结果数据,其中,第i组定位结果数据包括节点Nu,i与节点Nv,i之间的距离di和信号传播特征Pi,di和Pi是根据信道模型公式及节点Nu,i的位置对节点Nv,i进行定位后得到的,该信道模型公式用于表示信号传播特征与距离的关联关系,i表示定位次数,i=1,2...m,u和v表示节点编号;Collect m groups of positioning result data, wherein, the i-th group of positioning result data includes the distance di between the node Nu, i and the node Nv, i and the signal propagation characteristic Pi , di and Pi are based on the channel model formula and the position of node Nu, i are obtained after locating node Nv, i , the channel model formula is used to express the relationship between signal propagation characteristics and distance, i is the number of positioning times, i=1, 2...m , u and v represent the node number;
根据m组定位结果数据中的距离和信号传播特征对该信道模型公式进行修正,得到修正后的信道模型公式。The channel model formula is modified according to the distance and signal propagation characteristics in the m groups of positioning result data, and the modified channel model formula is obtained.
在第一种可能实现方式中,信道模型公式修正设备为用户设备或者服务器。也即是,本发明实施例提供的信道模型公式修正方法可以由进行定位的用户设备执行,也可以由任一服务器执行,本发明实施例对此不作限定。In a first possible implementation manner, the channel model formula correction device is a user equipment or a server. That is, the channel model formula correction method provided in the embodiment of the present invention may be executed by the user equipment performing positioning, or may be executed by any server, which is not limited in the embodiment of the present invention.
在第二种可能实现方式中,该处理器804还用于调用该程序代码,执行以下操作:In the second possible implementation manner, the
通过接收器801,接收定位服务器发送的di和Pi;或者,Through the
通过接收器801,接收节点Nv,i发送的di和Pi。Through the
在第三种可能实现方式中,该处理器804还用于调用该程序代码,通过接收器801,执行以下操作:In a third possible implementation manner, the
接收节点Nv,i发送的位置信息和Pi,该位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di;或者,Receive the position information and Pi sent by the node Nv, i, the position information is used to indicate the position of the node Nv, i , according to the position of the node Nu, i and the position of the node Nv, i , calculate the node Nu, distance di betweeni and node Nv, i; or,
接收节点Nv,i发送的位置信息,并接收定位服务器发送的Pi,该位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di;或者,Receive the position information sent by node Nv, i , and receive Pi sent by the positioning server, the position information is used to indicate the position of node Nv, i , according to the position of node Nu, i and the position of node Nv, i , calculate the distance d i between node Nu,i and nodeNv,i ; or,
接收节点Nv,i发送的位置信息,并接收节点Nu,i发送的Pi,该位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di;或者,Receive the position information sent by node Nv, i , and receive Pi sent by node Nu, i , the position information is used to indicate the position of node Nv, i , according to the position of node Nu, i and node Nv, the position ofi , calculate the distance d i between node Nu,i and nodeNv,i ; or,
接收定位服务器发送的节点Nv,i的位置信息和Pi,该位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di;或者,Receive the location information and Pi of the node Nv, i sent by the positioning server, the location information is used to indicate the location of the node Nv , i, and calculate the node according to the location of the node Nu, i and the location of the node Nv, i . distance d i between Nu,i and nodeNv,i ; or,
接收定位服务器发送的节点Nv,i的位置信息,并接收节点Nv,i发送的Pi,该位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di;或者,Receive the location information of the node Nv, i sent by the positioning server, and receive the Pi sent by the node Nv, i, the location information is used to indicate the location of the node Nv, i , according to the location of the node Nu, i and the node The position of Nv,i , calculate the distance d i between node Nu,i and node Nv,i ; or,
接收定位服务器发送的节点Nv,i的位置信息,并接收节点Nu,i发送的Pi,该位置信息用于指示节点Nv,i的位置,根据节点Nu,i的位置和节点Nv,i的位置,计算节点Nu,i与节点Nv,i之间的距离di。Receive the location information of the node Nv, i sent by the positioning server, and receive the Pi sent by the node Nu, i, the location information is used to indicate the location of the node Nv, i , according to the location of the node Nu, i and the node For the position of Nv ,i, the distance di between the node Nu,i and the node Nv,i is calculated.
在第四种可能实现方式中,该信道模型公式为
其中,d0表示已测量的节点N1,0与节点N2,0之间的参考距离,P0表示节点N1,0与节点N2,0之间的参考信号强度,n表示信道衰减参数,
该处理器804还用于调用该程序代码,执行以下操作:The
根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的参考信号强度P0’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected reference signal strength P0 ':

根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的信道衰减参数n’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected channel attenuation parameter n':

根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的均方差σ’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected mean square error σ':

根据P0’、n’和σ’,得到修正后的信道模型公式

采用滤波平滑算法,对P0、n、σ、P0’、n’和σ’进行平滑处理,得到P0”、n”和σ”,根据P0”、n”和σ”得到修正后的信道模型公式

在第五种可能实现方式中,该信道模型公式为
其中,d0表示已测量的节点N1,0与节点N2,0之间的参考距离,P0表示节点N1,0与节点N2,0之间的参考信号强度,α表示信道衰减参数,
该处理器804还用于调用该程序代码,执行以下操作:The
根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的参考信号强度P0’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected reference signal strength P0 ':

根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的信道衰减参数α’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected channel attenuation parameter α':

根据m组定位结果数据中的距离和信号强度,采用以下公式,计算修正后的均方差σ’:According to the distance and signal strength in the m groups of positioning result data, the following formula is used to calculate the corrected mean square error σ':

根据P0’、α’和σ’,得到修正后的信道模型公式

采用滤波平滑算法,对P0、α、σ、P0’、α’和σ’进行平滑处理,得到P0”、α”和σ”,根据P0”、α”和σ”得到修正后的信道模型公式

在第六种可能实现方式中,该信道模型公式为
其中,a表示第一加权参数,b表示第二加权参数,变量d表示节点Nu与节点Nv之间的距离,c为电磁波速率,变量Pt表示节点Nu与节点Nv之间的信号传播时间,
该处理器804还用于调用该程序代码,执行以下操作:The
根据m组定位结果数据中的距离和信号传播时间,采用以下公式,计算修正后的第一加权参数a’:According to the distance and signal propagation time in the m groups of positioning result data, the following formula is used to calculate the revised first weighting parameter a':

根据m组定位结果数据中的距离和信号传播时间,采用以下公式,计算修正后的第二加权参数b’:According to the distance and signal propagation time in the m groups of positioning result data, the following formula is used to calculate the revised second weighting parameter b':

根据m组定位结果数据中的距离和信号传播时间,采用以下公式,计算修正后的均方差σ’:According to the distance and signal propagation time in the m groups of positioning result data, the following formula is used to calculate the corrected mean square error σ':

根据a’、b’和σ’,得到修正后的信道模型公式

采用滤波平滑算法,对a、b、σ、a’、b’和σ’进行平滑处理,得到a”、b”和σ”,根据a”、b”和σ”得到修正后的信道模型公式

在第七种可能实现方式中,该滤波平滑算法为S”=x*S+(1-x)*S’;In a seventh possible implementation, the filtering and smoothing algorithm is S"=x*S+(1-x)*S';
其中,S表示原始参数,S’表示对S进行修正后得到的修正参数,S”表示对S和S’进行平滑处理后得到的参数,x表示加权系数,x为[0,1)范围内的数;Among them, S represents the original parameter, S' represents the correction parameter obtained after correcting S, S" represents the parameter obtained after smoothing S and S', x represents the weighting coefficient, and x is in the range of [0, 1) the number of;
或者,该滤波平滑算法为
其中,j表示修正次数,S表示原始参数,S(j-i+1)’表示在第j-i+1次对S进行修正后得到的修正参数,S(j)”表示在第j次修正时进行平滑处理后得到的参数,x表示加权系数,xi为[0,1)范围内的数,且
在本发明实施例中,该处理器804可以包括收集模块和修正模块,收集模块用于收集m组定位结果数据,修正模块用于根据m组定位结果数据中的距离和信号传播特征对该信道模型公式进行修正,得到修正后的信道模型公式。In this embodiment of the present invention, the
其中,针对于信道模型公式
针对于信道模型公式
针对于信道模型公式
本领域普通技术人员可以理解实现上述实施例的全部或部分步骤可以通过硬件来完成,也可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。Those of ordinary skill in the art can understand that all or part of the steps of implementing the above embodiments can be completed by hardware, or can be completed by instructing relevant hardware through a program, and the program can be stored in a computer-readable storage medium. The storage medium mentioned may be a read-only memory, a magnetic disk or an optical disk, etc.
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。The above are only preferred embodiments of the present invention and are not intended to limit the present invention. Any modifications, equivalent replacements, improvements, etc. made within the spirit and principles of the present invention shall be included in the protection of the present invention. within the range.
Claims (14)
























































Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201610262337.9ACN107305247B (en) | 2016-04-25 | 2016-04-25 | Channel model formula correction method, device and equipment |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201610262337.9ACN107305247B (en) | 2016-04-25 | 2016-04-25 | Channel model formula correction method, device and equipment |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107305247A CN107305247A (en) | 2017-10-31 |
| CN107305247Btrue CN107305247B (en) | 2021-04-20 |
Family
ID=60150251
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201610262337.9AActiveCN107305247B (en) | 2016-04-25 | 2016-04-25 | Channel model formula correction method, device and equipment |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN107305247B (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110689474B (en)* | 2019-06-15 | 2020-11-13 | 丽水新贝蕾科技有限公司 | Parameter correction mechanism based on dual-mode judgment |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1951027A (en)* | 2004-04-30 | 2007-04-18 | 香港应用科技研究院有限公司 | Location determination and location tracking in wireless networks |
| US8811189B2 (en)* | 2012-04-23 | 2014-08-19 | Cisco Technology, Inc. | Generating accurate dynamic heat maps |
| CN104025677A (en)* | 2011-08-18 | 2014-09-03 | 里瓦达研究公司 | Method and System for Providing Enhanced Location Based Information for Wireless Handsets |
| CN105072581A (en)* | 2015-08-26 | 2015-11-18 | 四川星网云联科技有限公司 | An Indoor Positioning Method Based on Path Attenuation Coefficient Database Construction |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7853267B2 (en)* | 2000-07-10 | 2010-12-14 | Andrew Llc | Wireless system signal propagation collection and analysis |
| US6990428B1 (en)* | 2003-07-28 | 2006-01-24 | Cisco Technology, Inc. | Radiolocation using path loss data |
| EP2584371B1 (en)* | 2011-10-17 | 2016-12-21 | Commissariat à l'Énergie Atomique et aux Énergies Alternatives | Range estimation method based on RSS measurement with limited sensitivity receiver |
| CN106209281B (en)* | 2016-06-23 | 2018-08-17 | 广州大学 | Wireless sensor network RSSI attenuation models calibrating installation and method on the spot |
- 2016
- 2016-04-25CNCN201610262337.9Apatent/CN107305247B/enactiveActive
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1951027A (en)* | 2004-04-30 | 2007-04-18 | 香港应用科技研究院有限公司 | Location determination and location tracking in wireless networks |
| CN104025677A (en)* | 2011-08-18 | 2014-09-03 | 里瓦达研究公司 | Method and System for Providing Enhanced Location Based Information for Wireless Handsets |
| US8811189B2 (en)* | 2012-04-23 | 2014-08-19 | Cisco Technology, Inc. | Generating accurate dynamic heat maps |
| CN105072581A (en)* | 2015-08-26 | 2015-11-18 | 四川星网云联科技有限公司 | An Indoor Positioning Method Based on Path Attenuation Coefficient Database Construction |
Non-Patent Citations (3)
| Title |
|---|
| Comparing Ray Tracing, Free Space Path Loss and Logarithmic Distance Path Loss Models in Success of Indoor Localization with RSSI;Ozkan Katirci等;《19th Telecommunications forum TELFOR 2011》;20111124;第313-316页* |
| 一种通用室内链路损耗经验模型的修正;刘韬等;《网络与通信》;20151231;第34卷(第6期);第69-71页* |
| 基于RSSI 的对数距离路径损耗模型研究;申静涛;《电子质量》;20131231(第12期);第15-17页* |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107305247A (en) | 2017-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109871702B (en) | Federal model training method, system, apparatus, and computer-readable storage medium | |
| CN106646356B (en) | A Nonlinear System State Estimation Method Based on Kalman Filter Positioning | |
| WO2020103908A1 (en) | Terminal position determination method and device, and storage medium | |
| CN109362084B (en) | Method, apparatus, device and medium for communication service quality optimization | |
| CN106353722A (en) | RSSI (received signal strength indicator) distance measuring method based on cost-reference particle filter | |
| CN109141427B (en) | EKF positioning method based on distance and angle probability model under non-line-of-sight environment | |
| CN106488548A (en) | A kind of determination method and device of indoor multipath error | |
| TW201625041A (en) | Signal strength distribution establishing method and wireless positioning system | |
| CN109508475A (en) | One kind being based on the modified failure active predicting method of multidimensional Kalman filtering | |
| CN109379711A (en) | a positioning method | |
| CN101216546B (en) | A Position Estimation Method for Target Location in Wireless Sensor Networks | |
| CN109041209B (en) | An RSSI-based Node Location Error Optimization Method for Wireless Sensor Networks | |
| CN105187139B (en) | A kind of outdoor radio signal reception strength map constructing method based on intelligent perception | |
| CN113759311A (en) | Positioning method, positioning device and storage medium | |
| CN107809737A (en) | A kind of method and apparatus for the network traffics for determining base station | |
| CN109379702A (en) | A three-dimensional sensor network node location method and system | |
| CN107305247B (en) | Channel model formula correction method, device and equipment | |
| CN112630728A (en) | Improved trilateral positioning algorithm based on UWB | |
| CN108848447B (en) | A Differential DV_Distance Node Localization Method Using Unknown Node Correction | |
| US10091610B2 (en) | Facilitation of determination of antenna location | |
| CN106952652A (en) | Noise reduction control method and system | |
| Hantono et al. | Testing Bluetooth low energy as indoor positioning technology using measured path loss exponent and weighted centroid localization methods | |
| TWI518351B (en) | Indoor positioning method and indoor positioning apparatus | |
| CN106850109B (en) | Leise factor estimation method and system | |
| JP6185804B2 (en) | Determination device, network node, determination method, and program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |