CN107044898B - Six-dimensional force sensor with elastomer structure - Google Patents
Six-dimensional force sensor with elastomer structureDownload PDFInfo
- Publication number
- CN107044898B CN107044898BCN201710190373.3ACN201710190373ACN107044898BCN 107044898 BCN107044898 BCN 107044898BCN 201710190373 ACN201710190373 ACN 201710190373ACN 107044898 BCN107044898 BCN 107044898B
- Authority
- CN
- China
- Prior art keywords
- elastic beam
- strain gauge
- branches
- strain
- horizontal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/16—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force
- G01L5/161—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force using variations in ohmic resistance
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/20—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress
- G01L1/22—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress using resistance strain gauges
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明属于传感器技术领域,尤其涉及一种具有弹性体结构的六维力传感器。The invention belongs to the technical field of sensors, in particular to a six-dimensional force sensor with an elastic body structure.
背景技术Background technique
六维力传感器测量的是笛卡尔坐标系三维空间的三维正交力(Fx,Fy,Fz)和三维正交力矩(Mx,My,Mz),由于其测力信息丰富、测量精度高等特点,主要应用在力及力-位控制场合,如机器人末端执行器,汽车行驶过程轮力检测,轮廓跟踪,精密装配,双手协调等,尤其在航空机器人,宇宙空间站对接仿真等场合发挥了极其重要的作用。The six-dimensional force sensor measures the three-dimensional orthogonal force (Fx, Fy, Fz) and three-dimensional orthogonal moment (Mx, My, Mz) in the three-dimensional space of the Cartesian coordinate system. Due to its rich force measurement information and high measurement accuracy, It is mainly used in force and force-position control occasions, such as robot end effectors, wheel force detection during vehicle driving, contour tracking, precision assembly, hand coordination, etc., especially in aerospace robots, space station docking simulations, etc. It plays an extremely important role effect.
十字梁型结构是目前六维力传感器采用最多的一种形式,而电阻应变式测力原理是目前六维力传感器中应用最多的一种。专利CN103528746A中公开了一种十字梁式六维力传感器弹性体,它由四个内梁、四个外梁和四个过载保护梁等组成,可以提高灵敏度,减小维间耦合,但是结构相对复杂。专利CN205333238U中公开了一种结构紧凑的应变式六维力传感器,它包括底座弹性体、十字梁弹性体等,底座弹性体具有一腔体,十字梁弹性体设于腔体内,整体结构较为紧凑。The cross-beam structure is the most widely used form of the six-dimensional force sensor at present, and the principle of resistance strain force measurement is the most widely used one in the current six-dimensional force sensor. Patent CN103528746A discloses a cross-beam type six-dimensional force sensor elastic body, which is composed of four inner beams, four outer beams and four overload protection beams, which can improve sensitivity and reduce inter-dimensional coupling, but the structure is relatively complex. Patent CN205333238U discloses a strain-type six-dimensional force sensor with a compact structure, which includes a base elastic body, a cross beam elastic body, etc., the base elastic body has a cavity, and the cross beam elastic body is arranged in the cavity, and the overall structure is relatively compact .
国际上对多维力/力矩传感器的研究热点多在检测原理、方法创新和新型弹性体结构设计等方面。而多维力/力矩传感器特有的维间耦合成为多维力/力矩传感器存在的主要问题,制约着测量精度,从而直接影响后续的力反馈与力控制性能。The research hotspots of multi-dimensional force/torque sensors in the world are mostly in the aspects of detection principle, method innovation and new elastic body structure design. However, the unique inter-dimensional coupling of multi-dimensional force/torque sensors has become the main problem of multi-dimensional force/torque sensors, which restricts the measurement accuracy and directly affects the subsequent force feedback and force control performance.
发明内容Contents of the invention
发明目的:为了减小六维力传感器的测量误差,本发明提供一种具有弹性体结构的六维力传感器。Purpose of the invention: In order to reduce the measurement error of the six-dimensional force sensor, the present invention provides a six-dimensional force sensor with an elastic body structure.
技术方案:一种具有弹性体结构的六维力传感器,包括水平弹性梁、中心垂直弹性梁、加载轴及外圈固定台,所述水平弹性梁为十字形结构,水平弹性梁包括四个等长分支,所述中心垂直弹性梁的一端固定在水平弹性梁十字形结构的中心位置,且与十字形结构所在的面垂直,所述加载轴安装在中心垂直弹性梁的另一端,所述外圈固定台为套设在水平弹性梁外侧的圆环状部件,外圈固定台包括内侧面,水平弹性梁的四个分支的末端固定在外圈固定台的内侧面上,水平弹性梁的四个分支的末端均为S型结构,所述水平弹性梁和/或中心垂直弹性梁上还贴覆有应变片。Technical solution: A six-dimensional force sensor with an elastic body structure, including a horizontal elastic beam, a central vertical elastic beam, a loading shaft and an outer ring fixing table, the horizontal elastic beam is a cross-shaped structure, and the horizontal elastic beam includes four etc. For the long branch, one end of the central vertical elastic beam is fixed at the center of the cross-shaped structure of the horizontal elastic beam, and is perpendicular to the surface where the cross-shaped structure is located, the loading shaft is installed at the other end of the central vertical elastic beam, and the outer The ring fixing platform is a ring-shaped part sleeved on the outside of the horizontal elastic beam. The outer ring fixing platform includes the inner surface. The ends of the four branches of the horizontal elastic beam are fixed on the inner surface of the outer ring fixing platform. The four branches of the horizontal elastic beam The ends of the branches are all S-shaped structures, and the horizontal elastic beams and/or the central vertical elastic beams are also covered with strain gauges.
工作原理:当传感器受到Y方向作用力Fy时,两个X向弹性梁分支发生弯曲变形,两个Y向弹性梁分支发生拉压形变且其变化量很小可忽略,此时其末端S型结构可看作柔性环节,Fy可通过粘贴于X向弹性梁左、右侧面的应变片组成的Wheatstone全桥电路测得;当传感器受到Z方向作用力矩Mz时,两个X向弹性梁分支发生弯曲变形,且两个X向弹性梁分支的左、右侧面的相同位置处产生的形变大小相等、方向相反,Mz即可通过粘贴于X向弹性梁左右侧面的应变片组成的Wheatstone全桥电路测得。Working principle: When the sensor is subjected to the force Fy in the Y direction, the two X-direction elastic beam branches undergo bending deformation, and the two Y-direction elastic beam branches undergo tension-compression deformation and the change is small and negligible. At this time, the S-shaped The structure can be regarded as a flexible link, and Fy can be measured by the Wheatstone full-bridge circuit composed of strain gauges pasted on the left and right sides of the X-direction elastic beam; when the sensor is subjected to the Z-direction acting torque Mz, the two X-direction elastic beams branch Bending deformation occurs, and the deformations produced at the same position on the left and right side of the two X-direction elastic beam branches are equal in size and opposite in direction, Mz can pass the whole Wheatstone composed of strain gauges pasted on the left and right sides of the X-direction elastic beam bridge circuit measured.
当传感器受到Z方向作用力Fz时,两个Y向弹性梁分支发生弯曲变形,且两个Y向弹性梁分支的上、下表面的相同位置处产生的形变大小相等、方向相反,Fz可通过粘贴于两个Y向弹性梁分支上、下表面的应变片组成的全桥电路测得;当传感器受到X方向力矩Mx时,两个Y向弹性梁分支发生弯曲变形,两个X向弹性梁分支发生扭转变形,且变形量很小可以忽略,Mx可通过粘贴于两个Y向弹性梁分支上下表面的应变片组成的全桥电路测得。When the sensor is subjected to the force Fz in the Z direction, the two Y-direction elastic beam branches are bent and deformed, and the deformations at the same position on the upper and lower surfaces of the two Y-direction elastic beam branches are equal in magnitude and opposite in direction, and Fz can be passed through Measured by a full-bridge circuit composed of strain gauges pasted on the upper and lower surfaces of two Y-direction elastic beam branches; when the sensor is subjected to X-direction torque Mx, the two Y-direction elastic beam branches undergo bending deformation, and the two X-direction elastic beams The branch is twisted and deformed, and the deformation is very small and can be ignored. Mx can be measured by a full-bridge circuit composed of strain gauges pasted on the upper and lower surfaces of the two Y-direction elastic beam branches.
当传感器受到X方向作用力Fx或Y方向力矩My时,中心垂直弹性梁发生较大弯曲变形,且中心垂直弹性梁的前、后侧面的相同位置处产生的应变大小相等、方向相反,Fx和My均可通过粘贴于中心垂直弹性梁前、后侧面的应变片组成的桥路测得。When the sensor is subjected to the force Fx in the X direction or the moment My in the Y direction, the central vertical elastic beam undergoes a large bending deformation, and the strains generated at the same position on the front and rear sides of the central vertical elastic beam are equal in size and opposite in direction, Fx and My can be measured through a bridge composed of strain gauges pasted on the front and rear sides of the central vertical elastic beam.
有益效果:本发明提供的一种具有弹性体结构的六维力传感器,水平弹性梁分支的末端设计为S型结构,使其在受到相应方向的作用力时作为柔性环节;相比较现有的十字梁型六维力传感器,多了一个中心垂直弹性梁,用以感受X方向的作用力Fx和Y方向的转矩My;除了在四个水平弹性梁分支上粘贴应变片外,在中心垂直弹性梁朝向Y向弹性梁分支的两个侧面也贴覆有两对应变片,减小了测量误差;现有的十字梁型六维力传感器在三个及三个以上方向间存在耦合(如Fy,Mz,Fx之间,Fz,Mx,My之间),而本专利具有弹性体结构的六维力传感器只在两个方向间存在耦合(如Fy,Mz之间,Fz,Mx之间,Fx,My之间),减小维间耦合,从而简化了解耦算法,提高测量精度。Beneficial effects: the invention provides a six-dimensional force sensor with an elastic body structure, the end of the horizontal elastic beam branch is designed as an S-shaped structure, so that it acts as a flexible link when it is subjected to a force in the corresponding direction; compared with the existing The cross-beam type six-dimensional force sensor has an additional central vertical elastic beam to feel the force Fx in the X direction and the torque My in the Y direction; in addition to pasting strain gauges on the four horizontal elastic beam branches, vertical The two sides of the elastic beam facing the Y-direction elastic beam branch are also covered with two pairs of strain gauges, which reduces the measurement error; the existing cross-beam type six-dimensional force sensor has coupling between three and more than three directions (such as Between Fy, Mz, Fx, between Fz, Mx, My), while the six-dimensional force sensor with an elastic body structure in this patent only has coupling between two directions (such as between Fy, Mz, between Fz, Mx , between Fx,My), reduce the inter-dimensional coupling, thereby simplifying the decoupling algorithm and improving the measurement accuracy.
附图说明Description of drawings
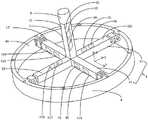
图1为本发明的具有弹性体结构的六维力传感器整体结构示意图。FIG. 1 is a schematic diagram of the overall structure of a six-dimensional force sensor with an elastic body structure according to the present invention.
具体实施方式Detailed ways
下面结合附图和具体实施例对本发明作进一步说明。The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
如图1所示,为方便描述方向,建立一个如图所示的空间笛卡尔坐标系。As shown in Figure 1, in order to facilitate the description of the direction, a spatial Cartesian coordinate system is established as shown in the figure.
如图1所示,具有弹性体结构的六维力传感器包括水平弹性梁1、中心垂直弹性梁2、加载轴3及外圈固定台4,所述水平弹性梁1为十字形结构,水平弹性梁1包括四个等长分支,所述中心垂直弹性梁2的一端固定在水平弹性梁1十字形结构的中心位置,且与十字形结构所在的面垂直,所述加载轴3安装在中心垂直弹性梁2的另一端,所述外圈固定台4为套设在水平弹性梁1外侧的圆环状部件,外圈固定台4包括内侧面41,水平弹性梁1的四个分支的末端固定在外圈固定台4的内侧面41上,水平弹性梁1的四个分支的末端均为S型结构,所述水平弹性梁和/或中心垂直弹性梁上还贴覆有应变片。所述S型结构的厚度为1mm。水平弹性梁分支的末端设计为S型结构,使其在受到相应方向的作用力时作为柔性环节,即起到浮动梁的作用。相比现有的十字梁型六维力传感器,本实施例多了一个中心垂直弹性梁2,用以感受X方向的作用力Fx和Y方向的转矩My。As shown in Figure 1, a six-dimensional force sensor with an elastic body structure includes a horizontal
所述中心垂直弹性梁2和水平弹性梁1的四个分支均为横截面是正方形的四棱柱。所述加载轴3为圆柱体结构。所述外圈固定台4上设有8个上下通孔,用于固定传感器。The four branches of the central vertical
所述水平弹性梁1的四个分支包括两个X向弹性梁分支11和两个Y向弹性梁分支12,两个X向弹性梁分支11在一条直线上,两个Y向弹性梁分支12在一条直线上,两个X向弹性梁分支11上的S型结构的开口方向相同,两个Y向弹性梁分支12上的S型结构的开口方向相同且与X向弹性梁分支11上的S型结构的开口方向垂直。在本实施例中,所述X向弹性梁分支11末端的S型结构的开口方向为左右方向;所述Y向弹性梁分支12末端的S型结构的开口方向为上下方向。The four branches of the horizontal
除此之外,本实施例对应变片的贴覆位置也有所设计。In addition, this embodiment also has a design for the sticking position of the strain gauge.
所述两个X向弹性梁分支11结构完全相同且在对称的位置贴覆有相同的应变片;其中一个X向弹性梁分支11包括左侧面111和右侧面(图中被遮挡,未示出),左侧面111的中心轴线上贴覆有第一应变片01和第二应变片02,右侧面上与第一应变片01和第二应变片02对应的位置分别贴覆有第三应变片和第四应变片(图中被遮挡,未示出);另一个X向弹性梁分支11’上分别与第一应变片01、第二应变片02、第三应变片、第四应变片相对应的四个应变片记为第十三应变片013、第十四应变片014、第十五应变片、第十六应变片。The two X-direction
所述两个Y向弹性梁分支结构完全相同且在对称的位置贴覆有相同的应变片;其中一个Y向弹性梁分支12包括上表面121和下表面(图中被遮挡,未示出),上表面121的中心轴线上贴覆有第五应变片05和第六应变片06,下表面上与第五应变片05和第六应变片06对应的位置分别贴覆有第七应变片和第八应变片(图中被遮挡,未示出);另一个Y向弹性梁分支12’上分别与第五应变片05、第六应变片06、第七应变片、第八应变片(图中被遮挡,未示出)相对应的四个应变片记为第十七应变片017、第十八应变片018、第十九应变片、第二十应变片(图中被遮挡,未示出)。The two Y-direction elastic beam branches have identical structures and are covered with the same strain gauges at symmetrical positions; one of the Y-direction
所述中心垂直弹性梁2包括前侧面21、后侧面(图中被遮挡,未示出)、左侧面22和右侧面(图中被遮挡,未示出),前侧面21与后侧面分别朝向两个X向弹性梁分支11,前侧面21的中心轴线上贴覆有第九应变片09和第十应变片010,后侧面上与第九应变片09和第十应变片010对应的位置分别贴覆有第十一应变片和第十二应变片(图中被遮挡,未示出)。The central vertical
所有的应变片均为相同的应变片。设第一应变片01到Y向弹性梁分支12的距离为d1,设第五应变片05到中心垂直弹性梁2的距离为d2,设第九应变片09到X向弹性梁分支11的距离为d3,其中d1=d2=d3;设第二应变片02到Y向弹性梁分支12的距离为d4,设第六应变片06到中心垂直弹性梁2的距离为d5,设第十应变片10到X向弹性梁分支11的距离为d6,其中d4=d5=d6;且第一应变片01到Y向弹性梁分支12的距离与第二应变片02到Y向弹性梁分支12的距离不相等,即d1≠d4。All strain gauges are the same strain gauge. Set the distance from the
这20个应变片一共组成了六组应变片组。每个应变片组通过电气连接组成一个Wheatstone全桥或半桥电路,用于测量空间一个维度的力或力矩。The 20 strain gauges constitute a total of six sets of strain gauges. Each strain gauge group is electrically connected to form a Wheatstone full-bridge or half-bridge circuit for measuring force or moment in one dimension of space.
第一应变片01、第三应变片、第十三应变片013和第十五应变片组成第一应变片组;第二应变片02、第四应变片、第十四应变片014和第十六应变片组成第二应变片组。当传感器受到Y方向的作用力或Z方向的力矩时,X方向的水平弹性梁会产生较大形变,因此,第一、二应变片组组成的Wheatstone电桥电路分别用于测量Y方向的作用力Fy和Z方向的力矩Mz的大小。The
第五应变片05、第七应变片、第十七应变片017和第十九应变片组成第三应变片组;第六应变片06、第八应变片、第十八应变片018和第二十应变片组成第四应变片组。当传感器受到Z方向作用力或X方向的力矩时,Y方向的水平弹性梁产生较大形变,因此,第三、四应变片组组成的Wheatstone电桥电路分别用于测量Z方向作用力Fz和X方向的力矩Mx的大小。The
第九应变片09和背面的第十一应变片组成第五应变片组,第十应变片10和背面的第十二应变片组成第六应变片组。当传感器受到X方向作用力或Y方向力矩时,中心竖直弹性梁产生较大形变,因此,第五、六应变片组组成的Wheatstone电桥电路分别用于测量X方向作用力Fx和Y方向力矩My的大小。The
该结构除了在四个水平弹性梁分支的相应位置粘贴有应变片组外,在中心垂直弹性梁2朝向X向弹性梁分支的两个侧面也贴覆有两对应变片,测量误差相对较小。该传感器结构在两个方向间存在耦合(如Fy,Mz之间,Fz,Mx之间,Fx,My之间),可以使解耦算法简单化,更加容易解耦。In addition to sticking strain gauge groups on the corresponding positions of the four horizontal elastic beam branches, this structure also has two pairs of strain gauges pasted on the two sides of the central vertical
Claims (7)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710190373.3ACN107044898B (en) | 2017-03-28 | 2017-03-28 | Six-dimensional force sensor with elastomer structure |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710190373.3ACN107044898B (en) | 2017-03-28 | 2017-03-28 | Six-dimensional force sensor with elastomer structure |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107044898A CN107044898A (en) | 2017-08-15 |
| CN107044898Btrue CN107044898B (en) | 2022-11-29 |
Family
ID=59544230
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710190373.3AActiveCN107044898B (en) | 2017-03-28 | 2017-03-28 | Six-dimensional force sensor with elastomer structure |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN107044898B (en) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108981987B (en)* | 2018-08-07 | 2020-08-11 | 东南大学 | A six-dimensional force sensor of small-dimensional coupling elastic beam |
| CN109186831B (en)* | 2018-09-28 | 2020-05-19 | 中国科学院长春光学精密机械与物理研究所 | Torque sensor |
| CN109855774B (en)* | 2019-01-23 | 2024-12-17 | 广西大学 | Layered capacitive multidimensional force sensor |
| CN109855773A (en)* | 2019-01-23 | 2019-06-07 | 广西大学 | A kind of force snesor with serpentine configuration beam |
| CN109708787B (en)* | 2019-03-07 | 2024-01-26 | 合肥工业大学 | Non-coupling multi-dimensional force sensor overload protection method and device |
| CN110368098B (en)* | 2019-08-14 | 2021-09-07 | 安徽工程大学 | A puncture force detection sensor |
| CN111728744B (en)* | 2020-05-15 | 2021-07-13 | 吉林大学 | A spherical bionic six-dimensional force sensor |
| CN112179534A (en) | 2020-10-28 | 2021-01-05 | 珠海格力电器股份有限公司 | Strain sensor and robot with same |
| CN113092270A (en)* | 2021-04-02 | 2021-07-09 | 浙江辰鑫机械设备有限公司 | High-precision electro-hydraulic servo universal testing machine |
| CN113375852B (en)* | 2021-06-22 | 2022-12-27 | 华北水利水电大学 | Mechanical decoupling type six-dimensional force and torque sensor |
| CN114812908B (en)* | 2021-07-23 | 2024-03-26 | 北京市计量检测科学研究院 | eight-branch orthogonal parallel six-component force sensor and structure optimization method thereof |
| CN113865771B (en)* | 2021-09-27 | 2023-11-17 | 华北水利水电大学 | Plane frog-like parallel two-dimensional force sensor and manufacturing method thereof |
| CN114018462B (en)* | 2021-10-22 | 2022-10-11 | 珠海格力电器股份有限公司 | Force sensor and intelligent equipment |
| CN114323394B (en)* | 2021-12-30 | 2024-09-03 | 航天南洋(浙江)科技有限公司 | Six-dimensional force sensor |
| CN114577434B (en)* | 2022-03-04 | 2024-04-02 | 中航电测仪器(西安)有限公司 | High-precision six-component balance and method |
| CN114603605B (en)* | 2022-03-07 | 2023-11-07 | 常熟理工学院 | Exoskeleton terminal tendency force detection device, detection method and manufacturing method |
| CN116519177A (en)* | 2023-04-03 | 2023-08-01 | 东南大学 | A combined six-dimensional force sensor based on thin film sputtering technology |
| CN116358752B (en)* | 2023-04-03 | 2025-08-26 | 东南大学 | A six-dimensional force sensor with a beam elastic structure capable of realizing sputtering process |
| CN116337291A (en)* | 2023-04-03 | 2023-06-27 | 东南大学 | A combined high-precision six-dimensional force sensor structure that can realize sputtering process |
| CN116698260B (en)* | 2023-07-07 | 2023-11-14 | 锐马(福建)电气制造有限公司 | A three-dimensional six-dimensional force sensor |
| CN117249936B (en)* | 2023-09-27 | 2024-05-07 | 北京科技大学 | Compliant six-dimensional force sensor based on flexible optical waveguide |
| CN119275698B (en)* | 2024-12-11 | 2025-03-18 | 天津阿尔戈斯科技发展有限公司 | Shock resistance adjusting mechanism of laser indicator |
Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5035148A (en)* | 1989-02-01 | 1991-07-30 | Wacoh Corporation | Force detector using resistance elements |
| CN2421630Y (en)* | 2000-06-02 | 2001-02-28 | 哈尔滨工业大学 | Multidimensional sensor |
| CN101672705A (en)* | 2009-09-29 | 2010-03-17 | 西北工业大学 | Six-dimensional force sensor |
| CN201561825U (en)* | 2009-09-29 | 2010-08-25 | 西北工业大学 | A kind of elastic body of six-dimensional force sensor |
| CN102095534A (en)* | 2010-12-08 | 2011-06-15 | 上海交通大学 | Double rood beam high-sensitivity six-dimensional moment sensor |
| CN103376172A (en)* | 2013-07-10 | 2013-10-30 | 上海交通大学 | Six-dimensional force sense sensor for minimally invasive surgical robot |
| CN103528746A (en)* | 2013-11-01 | 2014-01-22 | 哈尔滨工业大学 | Cross-shaped beam type elastomer for six-dimensional force sensor |
| CN203443725U (en)* | 2013-06-26 | 2014-02-19 | 宁波柯力传感科技股份有限公司 | Double-range tension sensor |
| CN103604561A (en)* | 2013-11-27 | 2014-02-26 | 东南大学 | Calibration device and method of six-axis force/torque sensor |
| CN103940544A (en)* | 2014-03-11 | 2014-07-23 | 东南大学 | Double crossed beam combination type finger joint six-dimensional force sensor |
| CN104048790A (en)* | 2014-06-06 | 2014-09-17 | 南京航空航天大学 | Dual orthogonal six-axis force sensor and measuring method |
| JP5667723B1 (en)* | 2014-08-15 | 2015-02-12 | 株式会社ワコーテック | Force sensor |
| CN205333238U (en)* | 2016-01-05 | 2016-06-22 | 泰科思(深圳)传感器有限公司 | Compact structure answers sextuple force transducer of variant |
| JP2019215369A (en)* | 2019-08-23 | 2019-12-19 | 株式会社トライフォース・マネジメント | Force sensor |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0474942A (en)* | 1990-07-16 | 1992-03-10 | Enplas Corp | Three-dimensional input device of stress sensor |
| CN2112378U (en)* | 1991-10-19 | 1992-08-12 | 华中理工大学 | Elastic body for wrist force sensor |
| JP2003185514A (en)* | 2001-12-21 | 2003-07-03 | Lion Corp | 3D load measuring device |
| CN101034022A (en)* | 2007-04-17 | 2007-09-12 | 燕山大学 | Six dimensional RSS force sensor |
| CN101750173B (en)* | 2010-01-21 | 2011-04-20 | 重庆大学 | Piezoelectric type six-dimensional force sensor |
| CN202216801U (en)* | 2011-08-08 | 2012-05-09 | 东南大学 | Calibration device for a six-dimensional force sensor with dual force sources |
| KR102203516B1 (en)* | 2013-03-12 | 2021-01-18 | 스트리커 코포레이션 | Sensor assembly and method for measuring forces and torques |
| CN103698076B (en)* | 2014-01-03 | 2015-08-19 | 东南大学 | A kind of six-dimensional force for realizing Range Extension and torque sensor |
| CN104048791B (en)* | 2014-06-24 | 2016-01-13 | 东南大学 | A low-dimensional intercoupling double-cross beam six-dimensional force and moment sensor |
- 2017
- 2017-03-28CNCN201710190373.3Apatent/CN107044898B/enactiveActive
Patent Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5035148A (en)* | 1989-02-01 | 1991-07-30 | Wacoh Corporation | Force detector using resistance elements |
| CN2421630Y (en)* | 2000-06-02 | 2001-02-28 | 哈尔滨工业大学 | Multidimensional sensor |
| CN101672705A (en)* | 2009-09-29 | 2010-03-17 | 西北工业大学 | Six-dimensional force sensor |
| CN201561825U (en)* | 2009-09-29 | 2010-08-25 | 西北工业大学 | A kind of elastic body of six-dimensional force sensor |
| CN102095534A (en)* | 2010-12-08 | 2011-06-15 | 上海交通大学 | Double rood beam high-sensitivity six-dimensional moment sensor |
| CN203443725U (en)* | 2013-06-26 | 2014-02-19 | 宁波柯力传感科技股份有限公司 | Double-range tension sensor |
| CN103376172A (en)* | 2013-07-10 | 2013-10-30 | 上海交通大学 | Six-dimensional force sense sensor for minimally invasive surgical robot |
| CN103528746A (en)* | 2013-11-01 | 2014-01-22 | 哈尔滨工业大学 | Cross-shaped beam type elastomer for six-dimensional force sensor |
| CN103604561A (en)* | 2013-11-27 | 2014-02-26 | 东南大学 | Calibration device and method of six-axis force/torque sensor |
| CN103940544A (en)* | 2014-03-11 | 2014-07-23 | 东南大学 | Double crossed beam combination type finger joint six-dimensional force sensor |
| CN104048790A (en)* | 2014-06-06 | 2014-09-17 | 南京航空航天大学 | Dual orthogonal six-axis force sensor and measuring method |
| JP5667723B1 (en)* | 2014-08-15 | 2015-02-12 | 株式会社ワコーテック | Force sensor |
| CN205333238U (en)* | 2016-01-05 | 2016-06-22 | 泰科思(深圳)传感器有限公司 | Compact structure answers sextuple force transducer of variant |
| JP2019215369A (en)* | 2019-08-23 | 2019-12-19 | 株式会社トライフォース・マネジメント | Force sensor |
Non-Patent Citations (1)
| Title |
|---|
| 《六维力/力矩传感器静态解耦算法的研究与应用》;茅晨,宋爱国,高翔,徐国政;《传感技术学报》;20151231;全文* |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107044898A (en) | 2017-08-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107044898B (en) | Six-dimensional force sensor with elastomer structure | |
| CN206648770U (en) | A kind of six-dimension force sensor of flexible body structure | |
| CN106124113B (en) | Novel six-dimensional force and torque sensor | |
| CN103940544B (en) | Diesis beam combined type articulations digitorum manus six-dimension force sensor | |
| CN104048791B (en) | A low-dimensional intercoupling double-cross beam six-dimensional force and moment sensor | |
| CN112611499B (en) | Method for measuring micro displacement of load platform of multi-dimensional force sensor and method for mounting measuring sensitive element | |
| CN103528746B (en) | A cross-beam type six-dimensional force sensor elastic body | |
| KR101335432B1 (en) | Force-torque sensor, force-torque sensor frame and force-torque measuring method | |
| CN103091026B (en) | Parallel structure six-dimension force sensor | |
| KR101481784B1 (en) | 6-component Loadcell | |
| CN102095534A (en) | Double rood beam high-sensitivity six-dimensional moment sensor | |
| CN103076131A (en) | Six-dimensional force and torque sensor for measuring large force and small torque of large mechanical arm | |
| US10627296B2 (en) | Force sensor | |
| CN205449351U (en) | Small -size three -dimensional force transducer | |
| CN109238528B (en) | Six-dimensional force sensor | |
| CN110243525B (en) | Six-dimensional force sensor | |
| CN109238530B (en) | Cloth piece measuring method of six-dimensional force sensor | |
| US11920993B1 (en) | Miniature combined multi-axis force sensor structure | |
| CN108981987A (en) | A kind of small retinoic acid syndrome spring beam six-dimension force sensor | |
| CN107131983A (en) | A kind of no-coupling six-dimensional force sensor of binocular structure | |
| CN105352647A (en) | Robot tail end twelve-dimension sensor and design method therefor | |
| CN105841857A (en) | Parallel-type five-dimensional force sensor | |
| CN110455455B (en) | A cylindrical six-dimensional force sensor for sensing traction | |
| CN102338675A (en) | Three-dimensional force sensor | |
| CN107036754A (en) | It is a kind of to perceive the six-dimension force sensor of contact force and tractive force |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |