CN103786806A - Multifunctional leg-and-wheel combination robot and multi-movement-mode intelligent switching method thereof - Google Patents
Multifunctional leg-and-wheel combination robot and multi-movement-mode intelligent switching method thereofDownload PDFInfo
- Publication number
- CN103786806A CN103786806ACN201410025261.9ACN201410025261ACN103786806ACN 103786806 ACN103786806 ACN 103786806ACN 201410025261 ACN201410025261 ACN 201410025261ACN 103786806 ACN103786806 ACN 103786806A
- Authority
- CN
- China
- Prior art keywords
- robot
- mode
- legs
- walking
- leg
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Manipulator (AREA)
Abstract
Translated fromChineseDescription
Translated fromChinese技术领域technical field
本发明属于机器人技术领域,涉及一种具有多功能腿轮复合机器人及多运动模式智能切换方法。The invention belongs to the technical field of robots, and relates to a composite robot with multifunctional leg wheels and an intelligent switching method for multi-motion modes.
背景技术Background technique
腿式机器人可通过泥泞路面、崎岖山地等复杂环境,具有较强的环境适应能力,但是具有控制困难,能耗高等缺点。轮式机器人可以快速,高效地通过平坦路面,但是其越障能力较差。轮、腿运动模式的结合为机器人运动带来新的便利,但实际运动中腿式行走和轮式运动之间相互影响,限制了机器人运动的速度及稳定性。探索更好的腿、轮运动结合方式,设计腿、轮分离运动的机构是当前需要解决的问题。Legged robots can pass through complex environments such as muddy roads and rugged mountains, and have strong environmental adaptability, but they have disadvantages such as difficult control and high energy consumption. Wheeled robots can pass through flat roads quickly and efficiently, but their ability to overcome obstacles is poor. The combination of wheel and leg movement mode brings new convenience to robot movement, but the interaction between leg walking and wheel movement in actual movement limits the speed and stability of robot movement. Exploring a better combination of leg and wheel motion, and designing a mechanism for separating the leg and wheel motion are currently problems that need to be solved.
移动机器人研究中,机器人大多只具有单一运动模式,限制了其应用范围。移动机器人运动模式由单一化向多样化发展是移动机器人的一个发展趋势。设计具有多种运动模式的六足机器人及多运动模式间的智能切换方法是当前需要解决的问题。In the research of mobile robots, most robots only have a single motion mode, which limits their application range. It is a development trend of mobile robots that the movement mode of mobile robots develops from simplification to diversification. The design of a hexapod robot with multiple motion modes and the intelligent switching method between multiple motion modes are current problems that need to be solved.
发明内容Contents of the invention
本发明为实现在复杂环境中快速、稳定运动,避免腿式和轮式运动相互影响,提供一种多功能腿轮复合机器人,并提供一种自主分析识别环境,智能决策多运动模式切换的方法。In order to realize fast and stable movement in a complex environment and avoid the mutual influence of legged and wheeled movements, the present invention provides a multi-functional leg-wheel composite robot, and provides a method for autonomously analyzing and identifying the environment, making intelligent decisions and switching between multi-movement modes .
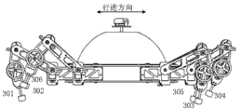
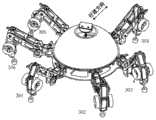
本发明首先提供一种多功能腿轮复合机器人,所述的腿轮复合机器人在本体周围均匀设置六条腿,所述六条腿呈圆周对称分布,每条腿包括髋部、大腿和小腿三段。本发明中将小腿设置为向内弯曲形状,并在弯曲处设置轮子,在小腿足端设置触力传感器,在小腿上还设置有红外测距传感器。在机器人本体上安装双目立体摄像机。The present invention firstly provides a multifunctional leg-wheel composite robot. The leg-wheel composite robot has six legs evenly arranged around the body. The six legs are distributed symmetrically around the circumference, and each leg includes hip, thigh and calf. In the present invention, the shank is set in an inwardly curved shape, and wheels are set at the bend, a force sensor is set at the foot end of the shank, and an infrared distance measuring sensor is also set on the shank. A binocular stereo camera is installed on the robot body.
基于上述的多功能腿轮复合机器人,本发明还提供一种所述的多功能腿轮复合机器人多运动模式智能切换方法包括如下步骤:Based on the above-mentioned multifunctional leg-wheel composite robot, the present invention also provides a method for intelligently switching between multi-motion modes of the multifunctional leg-wheel composite robot, including the following steps:
第一步,进行机器人所在位置的地形特征提取;The first step is to extract the terrain features of the robot's location;
第二步,确定每种运动模式的地形适应能力,并进行排序;所述的地形适应能力包括坡面稳定性、越障能力和陷入性;The second step is to determine the terrain adaptability of each movement mode and sort them; the terrain adaptability includes slope stability, obstacle-surmounting ability and trapping ability;
第三步,确定每种运动模式的地形适应性指标;The third step is to determine the terrain adaptability index of each movement mode;
第四步,确定每种运动模式的综合适应性指标;对于每种运动模式,分别取其地形适应性指标的最大值及平均值作为该运动模式综合适应性评价指标;The fourth step is to determine the comprehensive adaptability index of each sport mode; for each sport mode, the maximum value and average value of the terrain adaptability index are respectively taken as the comprehensive adaptability evaluation index of the sport mode;
第五步,对综合适应性指标进行修正,决策得到最佳运动模式;The fifth step is to revise the comprehensive adaptability index and determine the best exercise mode;
第六步,根据最佳运动模式进行运动模式切换;所述的运动模式包括轮式、仿哺乳动物、仿昆虫和混合模式;所述的运动模式切换包括仿哺乳动物行走与轮式运动模式相互切换、仿昆虫行走与轮式运动相互切换、混合行走模式与轮式运动相互切换、仿哺乳动物行走与仿昆虫行走相互切换、仿哺乳动物行走与混合模式行走相互切换、混合模式行走与仿昆虫行走相互切换。The sixth step is to switch the motion mode according to the best motion mode; the motion mode includes wheel, mammal imitation, insect imitation and mixed mode; the motion mode switching includes the interaction between mammal walking and wheel motion mode Switch, switch between insect-like walking and wheeled movement, switch between mixed walking mode and wheeled movement, switch between mammalian walking and insect-like walking, switch between mammalian walking and mixed-mode walking, mixed-mode walking and insect-like Walking switches between each other.
本发明的优点在于:The advantages of the present invention are:
(1)本发明提供的多功能腿轮复合机器人采用半球形保护罩,在相同体积下具有更大的表面积,其表面可覆盖更多太阳能电池,同时为机器人的传感器、处理器等内部系统提供了更好的保护。圆周对称的腿分布使机器人可实现多种运动方式,同时可以实现零半径转弯。特殊的腿轮机构设计满足轮式运动和腿式行走各自特定构型,且切换方便,同时避免了轮子安置在足端或膝关节处造成机器人轮式运动和腿式运动之间的相互干扰。双目立体摄像机平时隐藏于机器人的半球形保护罩内,探测时通过桅杆伸出,减少贵重传感器的损耗,桅杆顶部的云台具有三个自由度,可实现多个视角测量且保持稳定,通过多个传感器的融合,可完成地图构建及地形硬度测试。(1) The multi-functional leg-wheel composite robot provided by the present invention adopts a hemispherical protective cover, which has a larger surface area under the same volume, and its surface can cover more solar cells, and at the same time provide a sensor for the robot’s internal systems such as processors. better protection. Circumferentially symmetrical leg distribution enables the robot to realize a variety of locomotion modes and at the same time realize zero-radius turns. The special leg-wheel mechanism is designed to meet the specific configurations of wheeled motion and legged walking, and it is easy to switch, while avoiding the mutual interference between the robot's wheeled motion and legged motion caused by the wheels being placed at the foot or knee joint. The binocular stereo camera is usually hidden in the hemispherical protective cover of the robot. When detecting, it protrudes through the mast to reduce the loss of expensive sensors. The fusion of multiple sensors can complete map construction and terrain hardness testing.
(2)本发明提供的多运动模式智能切换方法,融合了不同的传感器信息,全面的提取了制约不同运动模式的环境几何和物理特征,同时综合考虑了不同运动模式之间的切换代价及速度、稳定性偏重需求。提出的综合适应性评价指标计算快,形式简单,能较好反映出不同运动模式对环境的适应性。提供的不同运动模式之间的切换方法快速,简便。通过该智能切换方法机器人可以快速决策并切换至最适宜当前环境的运动模式,避免了轮式运动时陷入的可能性及腿式行走能量的浪费,指导实现机器人在复杂环境中的快速稳定的运动。(2) The multi-sports mode intelligent switching method provided by the present invention integrates different sensor information, comprehensively extracts the environmental geometry and physical characteristics that restrict different sports modes, and comprehensively considers the switching cost and speed between different sports modes , Stability emphasizes demand. The proposed comprehensive adaptability evaluation index is quick to calculate and simple in form, and can better reflect the adaptability of different exercise modes to the environment. The method of switching between different sports modes provided is fast and easy. Through this intelligent switching method, the robot can quickly make decisions and switch to the motion mode that is most suitable for the current environment, avoiding the possibility of getting caught in wheeled motion and the waste of energy in legged walking, and guiding the realization of the rapid and stable motion of the robot in complex environments .
附图说明Description of drawings
图1A为本发明提供的多功能复合腿轮机器人的结构示意图;Fig. 1A is a schematic structural view of a multifunctional compound leg-wheel robot provided by the present invention;
图1B为本发明中提供的多功能复合腿轮机器人的单腿结构示意图;Fig. 1B is a schematic diagram of the single-leg structure of the multifunctional compound leg-wheel robot provided in the present invention;
图2为本发明中地图构建DEM图;Fig. 2 constructs DEM figure for map among the present invention;
图3A为本发明中轮式运动时机器人硬度测试构型示意图;Fig. 3A is a schematic diagram of the hardness test configuration of the robot during wheeled motion in the present invention;
图3B为本发明中腿式运动时机器人硬度测试构型示意图;Fig. 3B is a schematic diagram of the hardness test configuration of the robot during the leg movement of the present invention;
图4A~4D为本发明中多功能腿轮复合机器人四种运动模式示意图,依次为仿哺乳动物行走模式、仿昆虫行走模式、混合行走模式和轮式运动模式;4A to 4D are schematic diagrams of the four motion modes of the multifunctional leg-wheel composite robot in the present invention, which are mammal-like walking mode, insect-imitating walking mode, mixed walking mode and wheeled motion mode;
图5为轮式运动与仿昆虫、仿哺乳动物运动运动模式相互切换示意图;Fig. 5 is a schematic diagram of switching between wheeled movement and insect-imitation and mammal-imitation movement modes;
图6为轮式运动与混合运动模式相互切换示意图;Fig. 6 is a schematic diagram of switching between wheeled sports and mixed sports modes;
图7为本发明提供的智能切换方法流程图。Fig. 7 is a flow chart of the intelligent switching method provided by the present invention.
图中:In the picture:
1.主体; 2.半球形保护罩; 3.腿; 4.轮子; 5.触力传感器;1. Main body; 2. Hemispherical protective cover; 3. Legs; 4. Wheels; 5. Touch sensor;
6.红外测距传感器; 7.双目立体摄像机; 8.云台; 9.髋部; 10.大腿;6. Infrared ranging sensor; 7. Binocular stereo camera; 8. Cloud platform; 9. Hip; 10. Thigh;
11.小腿; 12.髋部舵机; 13.大腿舵机; 14.小腿舵机; 15.轮驱动舵机;11. Calf; 12. Hip steering gear; 13. Thigh steering gear; 14. Calf steering gear; 15. Wheel drive steering gear;
16.髋部舵机输出轴; 17.大腿舵机输出轴;16. Hip servo output shaft; 17. Thigh servo output shaft;
18.小腿舵机输出轴; 19.轮驱动舵机输出轴;18. The output shaft of the calf steering gear; 19. The output shaft of the wheel drive steering gear;
301.腿A; 302.腿B; 303.腿C; 304.腿D; 305;腿E;301. Leg A; 302. Leg B; 303. Leg C; 304. Leg D; 305; Leg E;
306.腿F。 401.轮A; 402.轮B; 403.轮C; 404.轮D;306. Legs F. 401. Round A; 402. Round B; 403. Round C; 404. Round D;
405.轮E; 406.轮F;405. Wheel E; 406. Wheel F;
具体实施方式Detailed ways
下面结合附图和实施例对本发明进行详细说明。The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
本发明提供一种多功能复合腿轮机器人,如图1所示,所述的机器人包括半球形保护罩2和本体1,本体1上四周均匀设置有六条相同腿轮复合结构的腿3,所述腿3如图1B所示,包括髋部9、大腿10和小腿11三段,其中在小腿11中部弯曲处设置有轮子4。所述机器人还包括用于地形检测的双目立体摄像机7(Point Grey公司的BumblebeeTM),IMU(XSENSMTi-100)和小腿部足底安装的触力传感器5(FSR4020.5)及小腿上装置的红外测距传感器6(SHARP GP2D12)。所述半球形保护罩2为铝合金结构,上方具有观察孔,半球形保护罩表面覆盖太阳能电池。The present invention provides a multifunctional composite leg-wheel robot. As shown in FIG. 1, the robot includes a hemispherical
所述机器人本体1为圆盘状结构,本体1与半球形保护罩2之间通过六个螺栓连接。六条腿3沿着机器人主体1呈圆周对称分布。所述机器人的每条腿3上髋部9、大腿10和小腿11三段腿的长度比例为1:9:10。所述髋部9通过髋横摆关节与本体1连接,通过髋纵摆关节与大腿10连接,所述大腿10通过膝关节与小腿11连接;所述的髋部9的根部连接有用于驱动髋部9相对于本体1横摆的髋部舵机12,所述的髋部舵机12的输出轴16与本体1固定连接。The
所述的髋部9前端连接有用于驱动大腿10相对于本体1纵摆的大腿舵机13,所述的大腿10与大腿舵机13的输出轴17固定连接。The front end of the
所述的小腿11上连接有用于驱动小腿伸展、收拢的小腿舵机14,所述的大腿10与小腿舵机14的输出轴18固定连接。所述小腿11为弯曲形状,弯曲夹角为165度,向本体1方向弯曲。所述的小腿11弯曲处固定有360°转动舵机15,舵机15的输出轴19通过花键直接连接轮子4,用于驱动轮子4转动。The
所述双目立体摄像机7安装在半球形保护罩2内部可升降的云台8上,可通过半球形保护罩2顶部设置的观察孔伸出进行探测,云台8具有三自由度。Described binocular stereo camera 7 is installed on hemispherical
所述红外测距传感器6设置在足底和轮子4中间位置的小腿11上,一般选取距离足底5cm的位置,通过两个螺钉与小腿11连接。所述红外测距传感器6用于测量地面与红外测距传感器6间距离,间接计算足底与地面间的距离。The infrared ranging
所述触力传感器5安置于足底,通过粘胶粘贴于橡胶材质的足底上,用于测量作用在机器人足底的接触压力。The
本发明提供的多功能轮腿复合机器人具有多种运动模式,具体的可分为轮式运动和腿式行走,其中腿式行走又可分为仿哺乳动物方式行走、仿昆虫方式行走、混合方式行走等。不同模式的运动具有各自特点及适宜的环境,本发明中通过双目立体摄像头、触力传感器和红外测距传感器采集的数据信息,对所处的地形环境进行建模,提取制约不同运动模式的关键特征(几何特征及物理硬度特征),分析对比各运动模式的环境适应性,同时考虑不同运动模式之间的切换代价及速度、稳定性偏重需求,综合决策地图上不同位置的适宜运动模式,并提供了不同运动模式之间的切换方法,为实现机器人的快速、稳定运动提供了一种有效方法。The multifunctional wheel-leg composite robot provided by the present invention has multiple motion modes, which can be specifically divided into wheel motion and leg-type walking, wherein leg-type walking can be further divided into mammal-like walking, insect-imitating walking, and hybrid walking. Walk and so on. Different modes of motion have their own characteristics and suitable environments. In the present invention, through the data information collected by binocular stereo cameras, touch sensors and infrared ranging sensors, the terrain environment is modeled, and the factors that restrict different motion modes are extracted. Key features (geometric features and physical hardness features), analyze and compare the environmental adaptability of each sport mode, and consider switching costs between different sport modes, speed, and stability, and comprehensively decide the appropriate sport mode for different positions on the map. And it provides a switching method between different motion modes, which provides an effective method for realizing the fast and stable motion of the robot.
本发明中提供的多运动模式智能切换方法,如图7所示,具体通过如下步骤实现:The multi-sport mode intelligent switching method provided in the present invention, as shown in Figure 7, is specifically implemented through the following steps:
第一步,地图构建及制约运动的地形特征提取;The first step is map construction and terrain feature extraction that constrains movement;
通过双目立体摄像头7,采用成熟的算法(如SLAM算法,见参考文献[1]:A.J.Davison,"Real-time simultaneous localisation and mapping with a single camera,"in Computer Vision,2003.Proceedings.Ninth IEEE International Conference on,2003,pp.1403-1410.)进行地图构建,得到机器人所处一定区域内的地形高程点阵云(DEM图),如图2所示,按照分辨率要求对该DEM图重新栅格化,这里设置栅格的大小为2cm×2cm,建立固定于机器人本体中心机器人坐标系ΣR世界坐标系ΣG。(Xi,Yj)代表世界坐标系ΣG中X-Y平面上的一个栅格,Zij=f(Xi,Yj)代表栅格(Xi,Yj)对应的高程值。将机器人在世界坐标系ΣG的X-Y平面内投影,假设机器人中心投影位于栅格(Xi,Yj)内部,将最小包络机器人投影的栅格区域([xi-n,xi+n],[yj-m,yj+m])作为一个投影区块,根据该投影区块及机器人沿运动方向移动一个栅格后投影区块的地形特征,决策相应的最适宜运动模式,即为栅格(Xi,Yj)的最适宜运动模式。定义机器人中心在世界坐标系ΣG中坐标为Through the binocular stereo camera 7, mature algorithms (such as SLAM algorithm, see reference [1]: AJDavison, "Real-time simultaneous localization and mapping with a single camera," in Computer Vision, 2003.Proceedings.Ninth IEEE International Conference on, 2003, pp.1403-1410.) Carry out map construction to obtain the terrain elevation point matrix cloud (DEM map) in a certain area where the robot is located, as shown in Figure 2, and re-grid the DEM map according to the resolution requirements For gridding, the size of the grid is set to 2cm×2cm, and the robot coordinate system ΣR and the world coordinate system ΣG fixed at the center of the robot body are established. (Xi , Yj ) represents a grid on the XY plane in the world coordinate system ΣG , Zij = f(Xi , Yj ) represents the elevation value corresponding to the grid (Xi , Yj ). Project the robot in the XY plane of the world coordinate system ΣG , assuming that the projection of the robot center is located inside the grid (Xi , Yj ), the grid area of the minimum envelope robot projection ([xin , xi+n ] ,[yjm , yj+m ]) as a projected block, according to the projected block and the topographic features of the projected block after the robot moves a grid along the motion direction, the corresponding optimal motion mode is determined, which is the grid The most suitable exercise mode for grid (Xi , Yj ). Define the coordinates of the robot center in the world coordinate system ΣG as
所述的地形特征包括坡度、越障高度、纹理和刚度,具体提取方法如下:The terrain features include slope, obstacle clearance height, texture and stiffness, and the specific extraction methods are as follows:
1、坡度:拟合机器人不同运动模式时的滚转角和俯仰角,具体分析步骤如下,1. Slope: Fit the roll angle and pitch angle of the robot in different motion modes. The specific analysis steps are as follows.
机器人坐标系ΣR与世界坐标系ΣG之间的位姿变换关系可以通过齐次矩阵TGR表示:The pose transformation relationship between the robot coordinate system ΣR and the world coordinate system ΣG can be expressed by a homogeneous matrix TGR :

其中,滚转角ψ为绕X轴旋转角,俯仰角θ为绕Y轴旋转角,偏航角

已知机器人六个足端在机器人坐标系ΣR中的位置为


当Δk=0时,代表机器人的足端和地面正好接触;When Δk =0, it means that the foot of the robot is just in contact with the ground;
当Δk>0时,代表机器人的足端在地面的上方;When Δk > 0, it means that the foot end of the robot is above the ground;
当Δk<0时,代表机器人的足端陷入地面。When Δk <0, it means that the foot end of the robot sinks into the ground.
现已知器人偏航角


构建的BP神经网络包含双隐层,输入层节点为8个,中间层分别包含10,15个神经元,输出层节点为3个。The constructed BP neural network includes double hidden layers, 8 input layer nodes, 10 and 15 neurons in the middle layer, and 3 output layer nodes.
输入:立足点处地形值

输出:俯仰角θ,滚转角ψ,本体中心坐标
训练样本:构建地图及机器人三维模型,导入ADAMS仿真软件中,随机选取不同地图位置进行仿真计算,获得神经网络的训练样本。Training samples: Construct a map and a 3D model of the robot, import it into the ADAMS simulation software, randomly select different map locations for simulation calculations, and obtain training samples for the neural network.
2、越障高度:2. Obstacle clearance height:
计算机器人沿运动方向移动至下一个栅格所需跨越台阶类障碍的最大高度ei,j:Calculate the maximum height ei, j of step obstacles that the robot needs to cross to move to the next grid along the direction of motion:
ei,j=maxp,q(zi+a+p,j+b+q-zi+p,j+q),p∈{-n,…,0,…,n},q∈{-m,…,0,…,m}ei, j = maxp, q (zi+a+p, j+b+q -z i+p, j+q ), p∈{-n,...,0,...,n}, q∈ {-m,...,0,...,m}
其中,
3、纹理:3. Texture:
针对机器人当前获得视野范围内的地图进行纹理特征分析,具体的步骤如下:To analyze the texture features of the map currently obtained by the robot within the field of view, the specific steps are as follows:
(1)提取N×M栅格图像代表纹理样本,其中N,M选取过小则无法代表纹理特征,选取过大则纹理分析耗时过长,这里取N=18n,M=18m;(1) Extract N×M raster images to represent texture samples, where N and M are too small to represent texture features, and too large to make texture analysis time-consuming, here N=18n, M=18m;
(2)用正交子空间映射法对N×M栅格图像进行降维处理,并提取降维后图像矩阵的特征根,该特征根一定程度反应了图像的纹理特征,即不同纹理特征图像对应不同的特征根。(2) Use the orthogonal subspace mapping method to reduce the dimensionality of the N×M grid image, and extract the characteristic root of the image matrix after dimensionality reduction. The characteristic root reflects the texture characteristics of the image to a certain extent, that is, different texture characteristic images corresponding to different characteristic roots.
(3)提取不同特征纹理样本相应特征根,如碎石,草地,沙子,土等,训练地形不同特征纹理识别神经网络,完成地图不同区域纹理识别。(3) Extract the corresponding characteristic roots of different characteristic texture samples, such as gravel, grass, sand, soil, etc., train the neural network for different characteristic texture recognition of terrain, and complete the texture recognition of different regions of the map.
4、硬度:4. Hardness:
基于红外测距传感器6和足底触力传感器5进行地面硬度测试,当机器人检测到不同纹理特征时,建议进行硬度测试,获取地形的硬度特征,防止地面过软,机器人陷入其中。具体的机器人轮式运动模式时测试构型如图3A,以其中一个腿A301为例,腿A301装备有红外测距传感器6及触力传感器5,小腿舵机14驱动小腿11收缩至极限后,大腿舵机13驱动大腿10向上纵摆,调整足底与预定测量位置接触后,机器人足底向下挤压地面至触力传感器5达到最大测量值,记录此过程中红外测距传感器6及足底触力传感器5数据值,拟合地面硬度。腿式运动测试构型如图3B,调整足底与预定测量位置接触后,机器人足底向下挤压地面至触力传感器5达到最大测量值记录此过程中红外测距传感器6及足底触力传感器5数据值,拟合地面硬度。。The ground hardness test is carried out based on the infrared ranging
所述的拟合地面硬度采用Bekker方程:The fitted ground hardness adopts the Bekker equation:
PC=keqDlPC =keq Dl
其中,PC是足底与地面的接触压强,l和keq是地形拟合参数,D为与地面垂直方向形变。PC和D分别由触力传感器和红外测距传感器测量获得。通过多组测量的PC,D,得到地形拟合参数l和keq。Among them, PC is the contact pressure between the sole of the foot and the ground, l and keq are terrain fitting parameters, and D is the deformation perpendicular to the ground. PC and D are measured by the force sensor and the infrared ranging sensor respectively. The terrain fitting parameters l and keq are obtained through multiple sets of measured PC and D .
第二步,对不同运动模式的地形适应性进行排序;The second step is to sort the terrain adaptability of different motion modes;
自然界中,哺乳动物以踢腿方式行走,主要通过膝关节发力,运动方向沿踢腿方向。昆虫通过腿的横摆进行运动,主要发力部位为髋关节,运动方向沿横摆方向。多功能六足腿轮复合机器人具有灵活的关节配置方式,机器人具有六条腿,依次为腿A301、腿B302、腿C303、腿D304、腿E305和腿F306,可仿生实现多种运动模式。如图4A所示,机器人采用仿哺乳动物方式行走,机器人腿B302、D304、F306为摆动腿,支撑腿A301、C303、E305主要通过小腿舵机14发力,推动本体1沿腿A301方向移动;如图4B所示,机器人采用仿昆虫方式行走,机器人腿B302、D304、F306为摆动腿,支撑腿A301、C303、E305主要通过髋部舵机12发力,推动本体1沿垂直腿A301方向移动。进一步的,通过对自然界生物运动模式分析综合,提出了一种混合运动模式,如图4C所示,腿B302、D304、F306为摆动腿,支撑腿腿C303、腿E305通过髋部舵机12发力,腿A301通过小腿舵机14发力,以混合哺乳动物和昆虫行走方式推动本体沿腿A301方向移动,机器人采用混合方式3+3行走。多功能腿轮复合机器人还可以通过轮腿切换,在平坦路面上实现轮行运动,如图4D所示。In nature, mammals walk by kicking, mainly exerting force through the knee joint, and the direction of motion is along the direction of kicking. Insects move through the lateral swing of the legs, the main force is the hip joint, and the movement direction is along the lateral swing direction. The multifunctional hexapod leg-wheel composite robot has flexible joint configuration. The robot has six legs, which are leg A301, leg B302, leg C303, leg D304, leg E305 and leg F306, and can realize various motion modes through bionics. As shown in Figure 4A, the robot walks in a mammal-like manner, the robot legs B302, D304, F306 are swing legs, and the supporting legs A301, C303, E305 mainly exert force through the
多功能腿轮复合机器人具有多种运动模式,分析比较各个运动模式的优点及地形适应能力,为适当运动模式选择提供依据。具体的不同运动模式的地形制约条件主要为:The multi-functional leg-wheel composite robot has a variety of motion modes. The advantages and terrain adaptability of each motion mode are analyzed and compared to provide a basis for the selection of an appropriate motion mode. The specific terrain constraints of different motion modes are mainly:
1、坡面稳定性:1. Slope stability:
机器人不同运动模式具有不同的坡面稳定性,这里采用能量稳定裕度ESM(energystability margin)指标进行衡量,具体的将沿各条支撑边界将机器人翻转至重心处于该支撑边界正上方时克服重力所做功的最小值定义为能量稳定裕度。Different motion modes of the robot have different slope stability. Here, the energy stability margin (ESM) index is used to measure. Specifically, the robot will be turned over along each support boundary until the center of gravity is directly above the support boundary to overcome the force of gravity. The minimum value of work is defined as the energy stability margin.
机器人具有最小安全能量稳定裕度时,对四种运动模式机器人进行分析得:When the robot has the minimum safety energy stability margin, the analysis of the four motion mode robots is as follows:
对于俯仰角稳定性排序及俯仰角极限值:For pitch angle stability sorting and pitch angle limit values:
仿哺乳动物运动(40°)>混合模式运动(30°)>轮式运动(25°)>仿昆虫运动(20°)Mammal-like movement (40°) > mixed-mode movement (30°) > wheeled movement (25°) > insect-like movement (20°)
对于滚转角稳定性排序及滚转角极限值:For roll stability sorting and roll limit values:
仿昆虫运动(40°)>混合模式运动(30°)>仿哺乳动物运动(20°)≈轮式运动(20°)Insect-like movement (40°) > mixed-mode movement (30°) > mammal-like movement (20°) ≈ wheel-like movement (20°)
2、越障能力;2. Obstacle-surmounting ability;
比较不同运动模式的越障能力:Compare the obstacle-surmounting abilities of different motion modes:
(1)轮式运动的最大越障高度一般为轮子半径R;(1) The maximum obstacle clearance height of wheeled sports is generally the wheel radius R;
(2)仿昆虫运动模式最大越障一般为本体高度H;(2) The maximum obstacle clearance in the insect-like movement mode is generally the body height H;
(3)仿哺乳动物越障高度严重受步长及立足点宽度影响,最大越障一般小于本体高度H,选取最大安全越障高度为h=H/2,这里h>R;(3) The obstacle-crossing height of imitating mammals is seriously affected by the step length and foothold width. The maximum obstacle-crossing height is generally less than the body height H. The maximum safe obstacle-crossing height is selected as h=H/2, where h>R;
(4)混合运动模式的越障能力越障性能介于昆虫和哺乳动物运动方式之间,在沿运动方向的轴线上受哺乳动物运动方式制约,最大越障高度为h,另外四条腿最大越障高度为H。(4) The obstacle-crossing ability of the hybrid movement mode is between that of insects and mammals. It is restricted by the movement of mammals on the axis along the movement direction. The barrier height is H.
越障能力排序为:The order of obstacle-surmounting ability is:
仿昆虫运动(H)>混合模式运动([h,H])>仿哺乳动物运动(h)>轮式运动(R)。Insect-like locomotion (H) > mixed-mode locomotion ([h, H]) > mammal-like locomotion (h) > wheel-like locomotion (R).
3、陷入性:3. Falling into sex:
不同的运动模式,对地面硬度的要求也不同,地面过软,如月球表面覆盖一层厚厚的月球灰,机器人可能会陷入其中,最终难以脱离。由本发明第一步中采用Bekker硬度拟合方程可知,变形量主要受地形拟合参数l和keq及接触压强PC影响,机器人本身只能通过减少接触压强来防止陷入,在相同重量下,接触压强主要受机器人与地面接触面积影响,即采用轮式运动模式时,轮子数量及腿式运动时同一时刻支撑腿的数量。腿式行走时,不同运动模式对接触压强影响较小,压强主要受步态影响,根据每个足端与地面接触面积和轮子与地面的接触面积,计算接触压强排序为:Different motion modes have different requirements for the hardness of the ground. If the ground is too soft, for example, the surface of the moon is covered with a thick layer of lunar dust, the robot may get stuck in it and it will be difficult to get out in the end. It can be seen that the Bekker hardness fitting equation is adopted in the first step of the present invention, the amount of deformation is mainly affected by the terrain fitting parameters l and keq and the contact pressure PC , and the robot itself can only prevent being trapped by reducing the contact pressure. Under the same weight, The contact pressure is mainly affected by the contact area between the robot and the ground, that is, the number of wheels and the number of supporting legs at the same time when using the wheeled movement mode. When walking on legs, different motion modes have little effect on the contact pressure, and the pressure is mainly affected by the gait. According to the contact area between each foot end and the ground and the contact area between the wheel and the ground, the calculated contact pressure is sorted as follows:
轮行(6.7kpa)≈3+3步态(6.7kpa)>4+2步态(5kpa)>5+1步态(4kpa)。Wheel walking (6.7kpa) ≈ 3+3 gait (6.7kpa) > 4+2 gait (5kpa) > 5+1 gait (4kpa).
其中,所述的3+3步态、4+2步态、5+1步态,加号“+”前面的数字(3、4、5)代表步态周期内任意时刻支撑腿的数量,后面数字(3、2、1)代表摆动腿的数量。Among them, in the 3+3 gait, 4+2 gait, and 5+1 gait, the numbers (3, 4, 5) in front of the plus sign "+" represent the number of supporting legs at any time in the gait cycle, The following numbers (3, 2, 1) represent the number of swinging legs.
第三步,确定每种运动模式的适应性指标;The third step is to determine the adaptability index of each exercise mode;
将各个地形制约特征与各运动模式的地形适应性进行归一化处理,得到各个运动模式的地形适应性指标,其中,下标wheel,mammal,insect,hybrid分别表示轮式运动、仿哺乳动物行走、仿昆虫行走、混合行走各个运动模式所对应的数据。具体的:Normalize each terrain constraint feature and the terrain adaptability of each movement mode to obtain the terrain adaptability index of each movement mode, where the subscripts wheel, mammal, insect, and hybrid represent wheeled movement and mammal-like walking respectively. , Insect-like walking, mixed walking data corresponding to each movement mode. specific:
越障适应性指标:Obstacle-surmounting adaptability index:
其中,IO为越障适应性指标,表示机器人需越过的障碍物高度与机器人越障能力之间的对比。其中e为通过第一步方法2计算获得的障碍物高度,R,h,H分别为相应运动模式(轮式、仿哺乳动物和仿昆虫运动模式)的最大越障高度。Among them, IO is the obstacle surmounting adaptability index, which means the comparison between the obstacle height that the robot needs to surmount and the obstacle surmounting ability of the robot. Where e is the obstacle height calculated by the
坡度适应性指标:Slope adaptability index:


其中,Iθ为俯仰角适应性指标,Iψ为滚转角适应性指标;表示机器人的姿态角与极限姿态角之间的对比。θ,ψ分别为通过第一步获得的不同运动模式机器人的俯仰角和滚转角,分母相应的角度为通过第二步获得相应运动模式的稳定角度极限值。Among them, Iθ is the pitch angle adaptability index, and Iψ is the roll angle adaptability index; it represents the comparison between the attitude angle of the robot and the limit attitude angle. θ and ψ are the pitch angle and roll angle of the robot in different motion modes obtained through the first step, respectively, and the corresponding angle of the denominator is the limit value of the stable angle of the corresponding motion mode obtained through the second step.
硬度适应性指标:Hardness adaptability index:
其中,IS为硬度适应性指标,表示机器人产生的接触压强与最大陷入量时接触压强的对比。nc为支撑腿的数目,nc由选用的步态确定,3+3步态nc=3;4+2步态nc=4;5+1步态nc=5。Swheel和Sfoot分别为单轮和单足与地面接触面积。G为机器人重量,Dmax为定义的最大变形量,keq,l为地形拟合参数。Among them, IS is the hardness adaptability index, which represents the comparison between the contact pressure generated by the robot and the contact pressure at the maximum sinking amount. nc is the number of supporting legs, nc is determined by the selected gait, 3+3 gait nc =3; 4+2 gait nc =4; 5+1 gait nc =5. Swheel and Sfoot are the contact area of single wheel and single foot with the ground respectively. G is the weight of the robot, Dmax is the defined maximum deformation, keq , and l is the terrain fitting parameter.
综合表示上述各适应性指标如表1所示:The comprehensive expression of the above-mentioned adaptability indicators is shown in Table 1:
表1不用运动模式适应性指标计算公式Table 1 Calculation formula of adaptability index of different exercise modes
如果表1中的各个适应性指标大于1,表示不适宜,归一化后令该指标等于1。用[0,1]之间的数值表示适应性指标的大小,0表示最适宜,1表示最不适宜。If each adaptability index in Table 1 is greater than 1, it means that it is not suitable, and the index is equal to 1 after normalization. Use the value between [0,1] to indicate the size of the adaptability index, 0 means the most suitable, and 1 means the most unsuitable.
第四步、综合适应性指标计算;The fourth step, comprehensive adaptability index calculation;
取表1中每一列(即每种运动模式)最大值及该列平均值作为该运动模式综合适应性评价指标,最大值表征主要地形特征约束,而平均值则表征了地形平均适宜情况,具体的实例计算如表2所示。Take the maximum value and the average value of each column (that is, each sport mode) in Table 1 as the comprehensive adaptability evaluation index of the sport mode. The maximum value represents the constraints of the main terrain features, while the average value represents the average suitability of the terrain. The example calculation of is shown in Table 2.
表2:综合适应性指标计算Table 2: Calculation of Comprehensive Adaptability Index
第五步、综合适应性指标修正,决策得到最佳运动模式。The fifth step is to correct the comprehensive adaptability index and make a decision to obtain the best exercise mode.
机器人的运动不仅受地形条件制约,同时也受控制需求的影响。下面根据切换代价,速度需求和稳定性需求对综合适应性指标进行修正,为方便表示,以下用“W”表示轮式运动模式,“M”表示仿哺乳动物行走模式,“I”表示仿昆虫行走模式,“H”表示混合行走模式。1、切换代价修正;The movement of the robot is not only constrained by terrain conditions, but also affected by control requirements. In the following, the comprehensive adaptability index is revised according to the switching cost, speed requirement and stability requirement. For the convenience of expression, “W” is used to represent the wheeled movement mode, “M” represents the mammalian walking mode, and “I” represents the insect imitation mode. Walking mode, "H" means hybrid walking mode. 1. Switching cost correction;
由于不同的运动模式之间切换会造成能量浪费等一定的代价,为避免造成频繁切换,根据不同运动模式之间的切换代价,对现有运动模式的综合适应性指标进行适当的修正,定义几种运动模式之间相互切换代价修正量如表3所示:Because switching between different sports modes will cause certain costs such as energy waste, in order to avoid frequent switching, according to the switching costs between different sports modes, the comprehensive adaptability index of the existing sports modes is properly corrected, and several definitions are defined. The cost corrections for switching between the two sports modes are shown in Table 3:
表3不同运动模式之间相互切换代价修正量Table 3 The cost correction amount of switching between different motion modes
具体的,例如当前机器人的运动状态为W模式,进行切换代价修正时,需分别对M,I,H的综合适应性指标上加上相应的运动模式切换修正量(W-M),(W-I),(W-H)。Specifically, for example, the current motion state of the robot is W mode, and when the switching cost is corrected, it is necessary to add the corresponding motion mode switching correction amount (W-M), (W-I), (W-H).
2、速度需求修正;2. Speed requirement correction;
不同运动模式具有不同最大运动速度,如速度为运动主要考虑因素,则在综合适应性指标相近情况下更偏爱轮式运动,依据各运动最大速度情况,定义几种运动模式的速度需求修正量如表4所示:Different sports modes have different maximum speeds. If speed is the main consideration of sports, wheeled sports are more preferred when the comprehensive adaptability index is similar. According to the maximum speed of each sports, the speed demand correction of several sports modes is defined as follows: Table 4 shows:
表4速度需求修正量Table 4 Speed Requirement Correction
选择该项需求指标后,将各运动模式的综合适应性指标加上相应的修正量,进行速度需求修正。After selecting this demand index, add the corresponding correction amount to the comprehensive adaptability index of each exercise mode to correct the speed demand.
3、稳定性需求修正;3. Stability requirement correction;
如针对运动稳定性有特定偏重,在综合适应性指标相近情况下更偏爱腿式运动。依据各运动稳定性情况,定义几种运动模式的稳定性需求修正量如表5所示:If there is a specific emphasis on exercise stability, leg exercise is more preferred when the comprehensive adaptability index is similar. According to the stability of each movement, the stability requirement corrections for several movement modes are defined as shown in Table 5:
表5稳定性需求修正量Table 5 Stability Requirement Correction
选择该项需求指标后,将各运动模式的综合适应性指标加上相应的修正量,进行稳定性需求修正。After selecting this demand index, add the corresponding correction amount to the comprehensive adaptability index of each exercise mode to correct the stability demand.
4、决策方法;4. Decision-making methods;
根据第四步可知,综合适应性指标包括两个指标部分,第一位为最大值,第二位为平均值,先比较不同运动模式之间综合适应性指标的第一位,选取第一位指标值最小的运动模式,例如表2中如仿哺乳动物行走模式及混合行走模式综合适应性指标第一位值为0.3,最小,如综合适应性指标第一位相等,再比较综合适应性指标的第二位,选取指标第二位中最小的值,如混合行走模式综合适应度指标为(0.3,0.2),为最佳运动模式。According to the fourth step, the comprehensive adaptive index includes two index parts, the first is the maximum value, and the second is the average value. First, compare the first comprehensive adaptive index between different exercise modes, and select the first The motion pattern with the smallest index value, for example, in Table 2, if the first digit of the comprehensive adaptability index of the imitation mammal walking mode and the mixed walking mode is 0.3, the minimum, if the first digit of the comprehensive adaptability index is equal, then compare the comprehensive adaptability index The second digit of the index, select the smallest value in the second digit of the index, such as the comprehensive fitness index of the mixed walking mode is (0.3, 0.2), which is the best exercise mode.
经不同需求因素修正后,相应的最适宜运动模式也可能会发生改变。例如综合适应性指标为,After being corrected by different demand factors, the corresponding optimal exercise mode may also change. For example, the comprehensive adaptability index is,
选取最佳运动模式为H模式。Select the best exercise mode as H mode.
假设当前运动模式为M模式,在表3中查找从M模式切换到其他三种运动模式的修正量,(M-W)、(M-I)、(M-H),并与相应的W,I,H模式综合适应性指标相加,则修正后的综合适应性指标为:Assuming that the current exercise mode is M mode, look up the corrections for switching from M mode to the other three exercise modes in Table 3, (M-W), (M-I), (M-H), and integrate them with the corresponding W, I, H modes Adding up the adaptability index, the revised comprehensive adaptability index is:
经切换代价修正后,最佳运动模式为M模式。After the switching cost correction, the best motion mode is M mode.
综合适应性指标经速度需求修正后为:After the comprehensive adaptability index is corrected by the speed requirement, it is:
经速度需求指标修正后,最佳运动模式为M模式。After being corrected by the speed demand index, the best sports mode is M mode.
综合适应性指标经稳定性需求修正后为:After the comprehensive adaptability index is modified by the stability requirement, it is:
经稳定性需求指标修正后,最佳运动模式为H模式。After being corrected by the stability demand index, the best exercise mode is H mode.
将修正后得到的最佳运动模式,与当前运动模式进行比较,如果不同就执行模式切换,转第六步,否则不做切换。Compare the best sports mode obtained after correction with the current sports mode, and if they are different, perform mode switching and go to
第六步,根据最佳运动模式进行多种运动模式之间的切换;The sixth step is to switch between various sports modes according to the best sports mode;
本发明提供的多功能轮腿复合机器人具有多种运动模式,不同运动模式之间可以根据上述第五步中的决策结果进行快速切换,具体切换方法为:The multifunctional wheel-legged composite robot provided by the present invention has multiple motion modes, and different motion modes can be quickly switched according to the decision result in the fifth step above. The specific switching method is as follows:
1、仿哺乳动物行走与轮式运动模式相互切换方法;1. A method for switching between mammal-like walking and wheeled movement modes;
机器人从仿哺乳动物行走切换到轮式运动的步骤如图5(a)~5(d)所示,机器人初始状态如图5(a)所示,具体切换步骤如下:The steps for the robot to switch from mammal-like walking to wheeled movement are shown in Figure 5(a)~5(d). The initial state of the robot is shown in Figure 5(a). The specific switching steps are as follows:
第一步,腿B302、D304、F306大腿舵机13驱动大腿10向下纵摆、小腿舵机14驱动小腿11收拢至小腿11与地面平行且小腿11与本体1距离为K,如图5(b)所示。In the first step, the
第二步,降低本体1高度至轮B402、D404、F406着地后,腿A301、C303、E305大腿舵机13驱动大腿10向上纵摆至最大值后,小腿舵机14驱动小腿11继续收拢至最小值,大腿舵机13驱动大腿10向下纵摆以及小腿舵机14驱动小腿11伸展至小腿11与地面平行且小腿11与本体距离为L(L<K),如图5(c)所示。The second step is to lower the height of the
第三步腿B302、D304、F306上三个大腿舵机13驱动大腿10向上纵摆,小腿舵机14驱动小腿11收缩至小腿11与地面平行且小腿11与本体1距离为L,至此六个轮子4完全与地面接触,机器人呈轮行状态,如图5(d)所示。In the third step, the three
机器人从轮式运动切换到仿哺乳动物行走的步骤如图5(d)~5(a)所示,机器人初始状态如图5(d)所示。具体切换步骤如下:The steps of the robot switching from wheeled motion to mammal-like walking are shown in Figure 5(d)~5(a), and the initial state of the robot is shown in Figure 5(d). The specific switching steps are as follows:
第一步腿B302、D304、F306上三个大腿舵机13驱动大腿10纵摆,小腿舵机14驱动小腿11伸展,本体1升高至与地面距离为K>L,如图5(c)所示。In the first step, the three
第二步,腿A301、C303、E305上三个小腿舵机14驱动小腿11收缩,大腿舵机13驱动大腿10伸展至各小腿11与地面垂直后,大腿舵机13驱动大腿10向下纵摆至足底落地后继续支撑,如图5(b)所示。In the second step, the three
第三步,升高本体1高度至H,腿B302、D304、F306运动至相应立足点,六腿平行,机器人处于仿哺乳动物行走初始状态,如图5(a)所示。In the third step, the height of the
2、仿昆虫行走与轮式运动相互切换方法;2. The method of switching between insect-like walking and wheeled movement;
机器人仿昆虫行走切换到轮式运动的步骤按照图5(a)~5(d)所示的顺序,与仿哺乳动物行走切换到轮式运动的步骤一致。The steps for the robot to switch from insect-like walking to wheeled movement follow the sequence shown in Figure 5(a)-5(d), which is consistent with the steps of switching from mammalian walking to wheeled movement.
机器人轮式运动切换到仿昆虫行走的步骤按照图5(d)~5(a)所示的顺序,与轮式运动切换到仿哺乳动物行走的步骤一致。The steps for the robot to switch from wheeled motion to insect-like walking follow the sequence shown in Figure 5(d)-5(a), which is consistent with the steps for switching from wheeled motion to mammal-like walking.
3、混合行走模式与轮式运动相互切换方法;3. The method of switching between mixed walking mode and wheeled movement;
机器人从混合行走模式切换到轮式运动的步骤如图6(a)~6(d)所示,机器人初始状态如图6(a)所示。具体切换步骤如下:The steps of the robot switching from the hybrid walking mode to the wheeled movement are shown in Figure 6(a)~6(d), and the initial state of the robot is shown in Figure 6(a). The specific switching steps are as follows:
第一步,腿B302、D304、306F上三个髋部舵机12驱动髋部9横摆至与腿A301平行,大腿舵机13驱动大腿10向下纵摆,小腿舵机14驱动小腿11收拢至小腿11与地面平行且小腿11与本体1距离为K,如图6(b)所示。In the first step, the three
第二步,降低本体1高度至轮B402、D404、F406着地后,腿A301、C303、E305上三个小腿舵机14驱动小腿11继续收拢,髋部舵机12驱动髋部9横摆至与运动轴线平行后,大腿舵机13驱动大腿10向下纵摆以及小腿舵机14驱动小腿11伸展至小腿11与地面平行且小腿11与本体1距离为L(L<K),如图6(c)所示。The second step is to lower the height of the
第三步,腿B302、D304、F306上三个大腿舵机13驱动大腿10向上纵摆,小腿舵机14驱动小腿11伸展至小腿11与地面平行且小腿11与本体1距离为L,至此六个轮子4完全与地面接触,机器人呈轮行状态,如图6(d)所示。In the third step, the three
机器人从轮式运动切换到混合行走模式的步骤按照图6(d)~6(a)所示的顺序,机器人初始状态如图6(d)所示。具体切换步骤如下:The steps for the robot to switch from wheeled motion to hybrid walking mode follow the sequence shown in Figure 6(d)~6(a), and the initial state of the robot is shown in Figure 6(d). The specific switching steps are as follows:
第一步腿B302、D304、F306上三个大腿舵机13驱动大腿10向下纵摆,小腿舵机14驱动小腿11伸展,本体1升高至与地面距离为K>L,如图6(c)所示。In the first step, the three
第二步腿A301、C303、E305上三个小腿舵机14驱动小腿11收缩,大腿舵机13驱动大腿10向上纵摆至各小腿11与地面垂直后,调节髋部舵机12驱动髋部9横摆,使腿A301、C303、E305呈120°轴对称分布,然后大腿舵机13驱动大腿10向下纵摆至足底落地后继续支撑,如图6(b)所示。In the second step, the three
第三步,本体1高度升高至H后,腿B302、D304、F306运动至相应立足点,六腿呈轴对称分布,机器人处于混合行走模式初始状态,如图6(a)所示。In the third step, after the height of the
4、仿哺乳动物行走与仿昆虫行走相互切换方法4. The method of switching between walking imitating mammals and walking imitating insects
仿哺乳动物行走与仿昆虫行走具有相同的初始姿态如图5(a)所示。Mammal-like walking has the same initial pose as insect-like walking, as shown in Figure 5(a).
从仿哺乳动物行走模式切换至仿昆虫行走模式,机器人初始如图4A所示,不妨假设此时腿B302、D304、F306为摆动腿,腿A301、C303、E305为支撑腿。具体切换步骤如下:Switching from the mammal-like walking mode to the insect-like walking mode, the initial stage of the robot is shown in Figure 4A. It may be assumed that legs B302, D304, and F306 are swinging legs, and legs A301, C303, and E305 are supporting legs. The specific switching steps are as follows:
第一步,调整腿A301、C303、E305支撑本体1水平移动二分之一步幅。In the first step, adjust the legs A301, C303, E305 to support the
第二步调整腿B302、腿D304、腿F306的落足点至与仿昆虫行走初始状态相同,此时机器人处于仿昆虫行走模式初始姿态,即可开始仿昆虫行走。The second step is to adjust the footholds of legs B302, D304, and F306 to be the same as the initial state of insect-imitation walking. At this time, the robot is in the initial posture of insect-imitation walking mode, and can start to imitate insects.
从仿昆虫行走模式切换至仿哺乳动物行走模式,机器人初始如图4C所示,不妨假设此时腿B302、腿D304、腿F306为摆动腿,腿A301、腿C303、腿E305为支撑腿。具体切换步骤如下:Switching from the insect-like walking mode to the mammal-like walking mode, the initial stage of the robot is shown in Figure 4C, assuming that the legs B302, D304, and F306 are swinging legs, and the legs A301, C303, and E305 are supporting legs. The specific switching steps are as follows:
第一步,调整腿A301、腿C303、腿E305支撑本体水平移动二分之一步幅。In the first step, adjust the leg A301, leg C303, and leg E305 to support the body to move horizontally by half of the stride.
第二步调整腿B302、腿D304、腿F306的落足点至与仿哺乳动物行走初始状态相同,此时机器人处于仿哺乳动物行走模式初始姿态,即可开始仿哺乳动物行走。The second step is to adjust the footholds of legs B302, D304, and F306 to be the same as the initial state of imitating mammal walking. At this time, the robot is in the initial posture of imitating mammal walking mode, and can start walking imitating mammals.
5、仿哺乳动物行走与混合模式行走相互切换方法5. The method of switching between mammalian walking and mixed mode walking
从仿哺乳动物行走模式切换至混合模式行走模式,机器人初始如图4D所示,不妨假设腿A301、腿C303、腿E305为支撑腿,腿B302、腿D304、腿F306为摆动腿。具体切换步骤如下:Switching from the mammalian walking mode to the hybrid walking mode, the robot is initially shown in Figure 4D, assuming that legs A301, C303, and E305 are supporting legs, and legs B302, D304, and F306 are swinging legs. The specific switching steps are as follows:
第一步、调整摆动腿腿B302、腿D304、腿F306上三个髋部舵机12驱动髋部9横摆,使其呈120°分布,着地后转换为支撑腿,本体1高度为H。The first step is to adjust the three
第二步、腿A301、腿C303、腿E305转换为摆动腿,调整腿A301、腿C303、腿E305上三个髋部舵机12驱动髋部9横摆至各腿呈圆周对称分布,此时机器人处于混合模式初始姿态,如图6(a)所示,即可开始混合行走。In the second step, the legs A301, C303, and E305 are converted into swinging legs, and the three
从混合模式行走模式切换至仿哺乳动物行走模式,机器人初始如图4D所示,不妨假设腿A301、腿C303、腿E305为支撑腿,腿B302、腿D304腿F306为摆动腿,具体切换步骤如下:To switch from the mixed walking mode to the mammalian walking mode, the robot is initially shown in Figure 4D. It may be assumed that legs A301, C303, and E305 are supporting legs, and legs B302, D304 and F306 are swinging legs. The specific switching steps are as follows :
第一步,调整摆动腿腿B302、腿D304腿F306上三个髋部舵机12驱动髋部9横摆,使其与腿A301平行,着地后转换为支撑腿。The first step is to adjust the three
第二步,腿A301、腿C303、腿E305转换为摆动腿,调整腿A301、腿C303、腿E305上三个髋部舵机驱动髋部横摆至各腿与腿A301平行,此时机器人处于仿哺乳动物行走初始姿态,如图5(a)所示,即可开始仿哺乳动物行走。In the second step, legs A301, C303, and E305 are converted into swing legs, and the three hip servos on legs A301, C303, and E305 are adjusted to drive the hips to swing until each leg is parallel to leg A301. At this time, the robot is in the The initial posture of imitating mammal walking, as shown in Figure 5(a), can start imitating mammal walking.
6、混合模式行走与仿昆虫行走相互切换方法6. The method of switching between mixed-mode walking and insect-like walking
混合模式行走与仿昆虫行走相互切换方法与仿哺乳动物行走与混合模式行走相互切换方法相同。The method for switching between the mixed-mode walking and the imitation insect walking is the same as the method for switching between the mammal-imitation walking and the mixed-mode walking.
Claims (8)
Translated fromChinese











Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201410025261.9ACN103786806B (en) | 2014-01-20 | 2014-01-20 | A kind of multi-functional leg wheel composite machine people and multi-locomotion mode intelligent switch method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201410025261.9ACN103786806B (en) | 2014-01-20 | 2014-01-20 | A kind of multi-functional leg wheel composite machine people and multi-locomotion mode intelligent switch method thereof |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN103786806Atrue CN103786806A (en) | 2014-05-14 |
| CN103786806B CN103786806B (en) | 2016-02-03 |
Family
ID=50662985
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201410025261.9AActiveCN103786806B (en) | 2014-01-20 | 2014-01-20 | A kind of multi-functional leg wheel composite machine people and multi-locomotion mode intelligent switch method thereof |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN103786806B (en) |
Cited By (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104002889A (en)* | 2014-06-10 | 2014-08-27 | 北京航空航天大学 | Multifunctional leg-wheel-combined mobile robot |
| CN104443105A (en)* | 2014-10-29 | 2015-03-25 | 西南大学 | Low-energy-loss six-foot robot |
| CN105730546A (en)* | 2016-02-02 | 2016-07-06 | 上海交通大学 | 3D printing technology-based minitype bionic six-legged robot |
| CN105843222A (en)* | 2016-03-18 | 2016-08-10 | 北京航空航天大学 | Six-wheel/leg robot compound movement path programming method |
| CN106393094A (en)* | 2015-07-30 | 2017-02-15 | 苏州宝时得电动工具有限公司 | Automatic moving robot |
| CN106695801A (en)* | 2017-02-24 | 2017-05-24 | 浙江师范大学 | Multi-functional rescue robot |
| CN106863278A (en)* | 2017-03-31 | 2017-06-20 | 中北大学 | A kind of PUU of wheel leg type 3 parallel connection mobile robots |
| CN106980321A (en)* | 2017-05-18 | 2017-07-25 | 中国科学院合肥物质科学研究院 | A kind of six foot carries out the top bar gait planning system and method for formula Unmanned Ground Vehicle |
| CN107553487A (en)* | 2017-08-22 | 2018-01-09 | 广东美的智能机器人有限公司 | The mode switching method and its device of robot |
| CN107813309A (en)* | 2017-11-16 | 2018-03-20 | 徐立志 | A kind of control method of fighter toy, device and fighter toy |
| CN107943021A (en)* | 2017-10-19 | 2018-04-20 | 布法罗机器人科技(成都)有限公司 | A kind of adaptive stair activity control system and method |
| CN108089583A (en)* | 2017-12-20 | 2018-05-29 | 中科新松有限公司 | A kind of method and apparatus of multi-foot robot movement transitions |
| CN108536011A (en)* | 2018-03-19 | 2018-09-14 | 中山大学 | A kind of Hexapod Robot complicated landform adaptive motion control method based on deeply study |
| CN109991672A (en)* | 2019-03-22 | 2019-07-09 | 华南理工大学 | Spherical sensor, monitoring system and monitoring method based on infrared detector |
| CN110377032A (en)* | 2019-07-08 | 2019-10-25 | 希格斯动力科技(珠海)有限公司 | Robot hillside fields motion control method and device, storage medium under semantic map |
| CN110444102A (en)* | 2018-05-02 | 2019-11-12 | 北京京东尚科信息技术有限公司 | Map constructing method, device and unmanned equipment |
| CN110919653A (en)* | 2019-11-29 | 2020-03-27 | 深圳市优必选科技股份有限公司 | Stair climbing control method and device for robot, storage medium and robot |
| CN112373594A (en)* | 2020-11-18 | 2021-02-19 | 中国矿业大学 | Wheel-leg hybrid drive type mining metamorphic robot |
| CN112571418A (en)* | 2020-12-15 | 2021-03-30 | 山东科技大学 | Four-footed robot motion state clustering and autonomous decision-making method |
| CN112572634A (en)* | 2020-11-16 | 2021-03-30 | 长春工业大学 | Wheel-foot hybrid walking robot structure and control system |
| CN113084825A (en)* | 2021-03-24 | 2021-07-09 | 深圳市注能科技有限公司 | Robot and robot foot |
| CN113200102A (en)* | 2021-06-17 | 2021-08-03 | 攀枝花学院 | Intelligent detection search and rescue instrument after spider-shaped disaster |
| CN113581316A (en)* | 2021-07-26 | 2021-11-02 | 北京航空航天大学 | Compact passive foot with wheel foot capable of being switched rapidly |
| CN113830195A (en)* | 2021-09-30 | 2021-12-24 | 西安文理学院 | A multifunctional foot-changing robot |
| CN113911229A (en)* | 2021-11-04 | 2022-01-11 | 安徽理工大学 | Hexapod robot suitable for different working environments can become cell |
| CN116560361A (en)* | 2023-04-23 | 2023-08-08 | 天地科技股份有限公司北京技术研究分公司 | Robot control method, device and electronic device |
| CN119929016A (en)* | 2025-01-22 | 2025-05-06 | 中国兵器装备集团自动化研究所有限公司 | A terrain perception system and a quadruped robot |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA1289600C (en)* | 1987-02-09 | 1991-09-24 | John Clark | Mechanical walking vehicle |
| JP3870257B2 (en)* | 2002-05-02 | 2007-01-17 | 独立行政法人 宇宙航空研究開発機構 | Robot with offset rotary joint |
| CN1966337A (en)* | 2006-11-23 | 2007-05-23 | 北京航空航天大学 | Gecko-emulated robot |
| CN102431604A (en)* | 2011-11-09 | 2012-05-02 | 上海交通大学 | Humanoid robot with function of interchanging double-foot walking with wheeled moving |
| CN202593677U (en)* | 2012-03-31 | 2012-12-12 | 浙江工业大学 | Six-wheel-foot type series-parallel mixed combination robot |
| CN102849140A (en)* | 2012-09-28 | 2013-01-02 | 河北工业大学 | Multi-moving-mode bionic moving robot |
| CN202657137U (en)* | 2012-04-11 | 2013-01-09 | 中国人民解放军国防科学技术大学 | Combined wheel and leg type motion platform |
- 2014
- 2014-01-20CNCN201410025261.9Apatent/CN103786806B/enactiveActive
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA1289600C (en)* | 1987-02-09 | 1991-09-24 | John Clark | Mechanical walking vehicle |
| JP3870257B2 (en)* | 2002-05-02 | 2007-01-17 | 独立行政法人 宇宙航空研究開発機構 | Robot with offset rotary joint |
| CN1966337A (en)* | 2006-11-23 | 2007-05-23 | 北京航空航天大学 | Gecko-emulated robot |
| CN102431604A (en)* | 2011-11-09 | 2012-05-02 | 上海交通大学 | Humanoid robot with function of interchanging double-foot walking with wheeled moving |
| CN202593677U (en)* | 2012-03-31 | 2012-12-12 | 浙江工业大学 | Six-wheel-foot type series-parallel mixed combination robot |
| CN202657137U (en)* | 2012-04-11 | 2013-01-09 | 中国人民解放军国防科学技术大学 | Combined wheel and leg type motion platform |
| CN102849140A (en)* | 2012-09-28 | 2013-01-02 | 河北工业大学 | Multi-moving-mode bionic moving robot |
Non-Patent Citations (1)
| Title |
|---|
| DING XILUN: "Dynamics and Wheel’s Slip Ratio of a Wheel-legged Robot in Wheeled Motion Considering the Change of Height", 《CHINESE JOURNAL OF MECHANICAL ENGINEERING》, no. 5, 31 December 2012 (2012-12-31)* |
Cited By (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104002889A (en)* | 2014-06-10 | 2014-08-27 | 北京航空航天大学 | Multifunctional leg-wheel-combined mobile robot |
| CN104002889B (en)* | 2014-06-10 | 2016-03-16 | 北京航空航天大学 | A kind of multi-functional leg wheel composite mobile robot |
| CN104443105A (en)* | 2014-10-29 | 2015-03-25 | 西南大学 | Low-energy-loss six-foot robot |
| CN106393094A (en)* | 2015-07-30 | 2017-02-15 | 苏州宝时得电动工具有限公司 | Automatic moving robot |
| CN105730546A (en)* | 2016-02-02 | 2016-07-06 | 上海交通大学 | 3D printing technology-based minitype bionic six-legged robot |
| CN105843222A (en)* | 2016-03-18 | 2016-08-10 | 北京航空航天大学 | Six-wheel/leg robot compound movement path programming method |
| CN105843222B (en)* | 2016-03-18 | 2019-04-12 | 北京航空航天大学 | A kind of six-wheel/leg robot complex motion paths planing method |
| CN106695801A (en)* | 2017-02-24 | 2017-05-24 | 浙江师范大学 | Multi-functional rescue robot |
| CN106695801B (en)* | 2017-02-24 | 2023-03-21 | 浙江师范大学 | Multifunctional rescue robot |
| CN106863278B (en)* | 2017-03-31 | 2023-04-18 | 中北大学 | Wheel-leg type 3-PUU parallel mobile robot |
| CN106863278A (en)* | 2017-03-31 | 2017-06-20 | 中北大学 | A kind of PUU of wheel leg type 3 parallel connection mobile robots |
| CN106980321A (en)* | 2017-05-18 | 2017-07-25 | 中国科学院合肥物质科学研究院 | A kind of six foot carries out the top bar gait planning system and method for formula Unmanned Ground Vehicle |
| CN106980321B (en)* | 2017-05-18 | 2019-04-16 | 中国科学院合肥物质科学研究院 | A kind of six foot carries out the top bar gait planning system and method for formula Unmanned Ground Vehicle |
| CN107553487A (en)* | 2017-08-22 | 2018-01-09 | 广东美的智能机器人有限公司 | The mode switching method and its device of robot |
| CN107553487B (en)* | 2017-08-22 | 2021-05-25 | 广东美的智能机器人有限公司 | Mode switching method and device for robot |
| CN107943021A (en)* | 2017-10-19 | 2018-04-20 | 布法罗机器人科技(成都)有限公司 | A kind of adaptive stair activity control system and method |
| CN107943021B (en)* | 2017-10-19 | 2021-03-30 | 布法罗机器人科技(成都)有限公司 | Self-adaptive stair ascending and descending control system and method |
| CN107813309A (en)* | 2017-11-16 | 2018-03-20 | 徐立志 | A kind of control method of fighter toy, device and fighter toy |
| CN108089583B (en)* | 2017-12-20 | 2020-12-25 | 中科新松有限公司 | Method and device for motion transition of multi-legged robot |
| CN108089583A (en)* | 2017-12-20 | 2018-05-29 | 中科新松有限公司 | A kind of method and apparatus of multi-foot robot movement transitions |
| CN108536011A (en)* | 2018-03-19 | 2018-09-14 | 中山大学 | A kind of Hexapod Robot complicated landform adaptive motion control method based on deeply study |
| CN110444102A (en)* | 2018-05-02 | 2019-11-12 | 北京京东尚科信息技术有限公司 | Map constructing method, device and unmanned equipment |
| CN110444102B (en)* | 2018-05-02 | 2021-10-01 | 北京京东乾石科技有限公司 | Map construction method, device and unmanned vehicle |
| CN109991672A (en)* | 2019-03-22 | 2019-07-09 | 华南理工大学 | Spherical sensor, monitoring system and monitoring method based on infrared detector |
| CN109991672B (en)* | 2019-03-22 | 2021-06-08 | 华南理工大学 | Spherical sensor, monitoring system and monitoring method based on infrared detector |
| CN110377032B (en)* | 2019-07-08 | 2022-05-27 | 佳木斯市奥义智能科技有限公司 | Semantic map lower robot sloping field motion control method and device and storage medium |
| CN110377032A (en)* | 2019-07-08 | 2019-10-25 | 希格斯动力科技(珠海)有限公司 | Robot hillside fields motion control method and device, storage medium under semantic map |
| CN110919653A (en)* | 2019-11-29 | 2020-03-27 | 深圳市优必选科技股份有限公司 | Stair climbing control method and device for robot, storage medium and robot |
| CN112572634A (en)* | 2020-11-16 | 2021-03-30 | 长春工业大学 | Wheel-foot hybrid walking robot structure and control system |
| CN112373594A (en)* | 2020-11-18 | 2021-02-19 | 中国矿业大学 | Wheel-leg hybrid drive type mining metamorphic robot |
| CN112571418A (en)* | 2020-12-15 | 2021-03-30 | 山东科技大学 | Four-footed robot motion state clustering and autonomous decision-making method |
| CN112571418B (en)* | 2020-12-15 | 2022-02-25 | 山东科技大学 | Four-footed robot motion state clustering and autonomous decision-making method |
| CN113084825A (en)* | 2021-03-24 | 2021-07-09 | 深圳市注能科技有限公司 | Robot and robot foot |
| CN113200102A (en)* | 2021-06-17 | 2021-08-03 | 攀枝花学院 | Intelligent detection search and rescue instrument after spider-shaped disaster |
| CN113581316A (en)* | 2021-07-26 | 2021-11-02 | 北京航空航天大学 | Compact passive foot with wheel foot capable of being switched rapidly |
| CN113830195A (en)* | 2021-09-30 | 2021-12-24 | 西安文理学院 | A multifunctional foot-changing robot |
| CN113911229A (en)* | 2021-11-04 | 2022-01-11 | 安徽理工大学 | Hexapod robot suitable for different working environments can become cell |
| CN113911229B (en)* | 2021-11-04 | 2023-02-28 | 安徽理工大学 | Hexapod robot suitable for different working environments can become cell |
| CN116560361A (en)* | 2023-04-23 | 2023-08-08 | 天地科技股份有限公司北京技术研究分公司 | Robot control method, device and electronic device |
| CN119929016A (en)* | 2025-01-22 | 2025-05-06 | 中国兵器装备集团自动化研究所有限公司 | A terrain perception system and a quadruped robot |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103786806B (en) | 2016-02-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103786806B (en) | A kind of multi-functional leg wheel composite machine people and multi-locomotion mode intelligent switch method thereof | |
| Chavez-Garcia et al. | Learning ground traversability from simulations | |
| CN111260057B (en) | Foot type robot terrain sensing method based on virtual sensor | |
| WO2019076044A1 (en) | Mobile robot local motion planning method and apparatus and computer storage medium | |
| CN107877493B (en) | A kind of indoor activity support robot system for the elderly and its application method | |
| CN107397658B (en) | Multi-scale full-convolution network and visual blind guiding method and device | |
| CN111368755A (en) | A vision-based approach to autonomous pedestrian following for a quadruped robot | |
| US10196104B1 (en) | Terrain Evaluation for robot locomotion | |
| CN102670217A (en) | Wearable sensor measuring device and method for lower limb joint acting force and moment | |
| Zhong et al. | Trajectory planning for biped robot walking on uneven terrain–Taking stepping as an example | |
| CN115337009A (en) | A Gait Recognition and Prediction Method Based on Fully Connected and Recurrent Neural Networks | |
| CN115944509B (en) | Traction-type guide leg-arm robot | |
| CN101412218A (en) | Human movement path-based method for evaluating similarity of robot rhythmic actions | |
| CN111673729B (en) | path determination method | |
| Cao et al. | Environmental mapping and path planning for robots in orchard based on traversability analysis, improved LeGO-LOAM and RRT* algorithms | |
| CN102930250B (en) | A kind of action identification method of multi-scale random field models | |
| Li et al. | An experimental analysis of overcoming obstacle in human walking | |
| Khalilullah et al. | Road area detection method based on DBNN for robot navigation using single camera in outdoor environments | |
| CN118730080A (en) | Multi-information map navigation method for legged robots based on visual inference of field terrain types and physical characteristics | |
| Wang et al. | A new fall detection method based on fuzzy reasoning for an omni-directional walking training robot | |
| Wang et al. | Vision-based terrain perception of quadruped robots in complex environments | |
| CN103600786A (en) | Intelligent doraemon | |
| CN115194736A (en) | Lower limb exoskeleton robot power-assisted system of self-adaptive gravity adjusting mechanism | |
| CN113133907B (en) | Stepping path guide | |
| CN215308047U (en) | Stepping Pathfinder Blind Guide |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |