CN103712035A - Cage type pipeline aircraft - Google Patents
Cage type pipeline aircraftDownload PDFInfo
- Publication number
- CN103712035A CN103712035ACN201410007797.8ACN201410007797ACN103712035ACN 103712035 ACN103712035 ACN 103712035ACN 201410007797 ACN201410007797 ACN 201410007797ACN 103712035 ACN103712035 ACN 103712035A
- Authority
- CN
- China
- Prior art keywords
- pipeline
- aircraft
- cage
- roll
- cage type
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514detection methodMethods0.000claimsabstractdescription4
- 238000005096rolling processMethods0.000claimsdescription3
- 239000002002slurrySubstances0.000claims2
- 238000012423maintenanceMethods0.000abstractdescription4
- 230000000630rising effectEffects0.000abstract1
- 238000012544monitoring processMethods0.000description3
- 238000010586diagramMethods0.000description2
- RZVHIXYEVGDQDX-UHFFFAOYSA-N9,10-anthraquinoneChemical compoundC1=CC=C2C(=O)C3=CC=CC=C3C(=O)C2=C1RZVHIXYEVGDQDX-UHFFFAOYSA-N0.000description1
- 229920000049Carbon (fiber)Polymers0.000description1
- 239000004677NylonSubstances0.000description1
- 239000004917carbon fiberSubstances0.000description1
- 238000005516engineering processMethods0.000description1
- 230000005484gravityEffects0.000description1
- 238000007689inspectionMethods0.000description1
- 230000007246mechanismEffects0.000description1
- VNWKTOKETHGBQD-UHFFFAOYSA-NmethaneChemical compoundCVNWKTOKETHGBQD-UHFFFAOYSA-N0.000description1
- 238000000034methodMethods0.000description1
- 229920001778nylonPolymers0.000description1
- 239000003208petroleumSubstances0.000description1
- 238000011897real-time detectionMethods0.000description1
- 239000000126substanceSubstances0.000description1
- 239000002023woodSubstances0.000description1
Images

Classifications
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L55/00—Devices or appurtenances for use in, or in connection with, pipes or pipe systems
- F16L55/26—Pigs or moles, i.e. devices movable in a pipe or conduit with or without self-contained propulsion means
- F16L55/28—Constructional aspects
- F16L55/30—Constructional aspects of the propulsion means, e.g. towed by cables
- F16L55/32—Constructional aspects of the propulsion means, e.g. towed by cables being self-contained
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L2101/00—Uses or applications of pigs or moles
- F16L2101/30—Inspecting, measuring or testing
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- General Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Engineering (AREA)
- Pipeline Systems (AREA)
Abstract
Description
Translated fromChinese所属技术领域Technical field
本发明涉及无人飞行器、智能机器人、运动控制等多领域,尤其涉及用于管道检测与维护的管道机器人。The invention relates to multiple fields such as unmanned aerial vehicles, intelligent robots, and motion control, and in particular to pipeline robots used for pipeline detection and maintenance.
背景技术Background technique
现如今各种石油、化工、排气等管道广泛分布于工业及生活区域内,但多数管道埋藏于地下或者位于其他不易接触的地方,因此管道检测与维护成为一个难题。管道飞行器是管道机器人中的一种,与其他管道机器人相比,其灵活度及机动性能更高,适用范围更加广泛。管道飞行器在实际管道检测与维护中具有很高的实用价值。Nowadays, various petroleum, chemical, exhaust and other pipelines are widely distributed in industrial and living areas, but most of them are buried underground or located in other inaccessible places, so pipeline inspection and maintenance have become a difficult problem. The pipeline aircraft is a kind of pipeline robot. Compared with other pipeline robots, it has higher flexibility and maneuverability, and a wider range of applications. The pipeline aircraft has high practical value in actual pipeline detection and maintenance.
目前已有的管道机器人主要是以下几种结构。The existing pipeline robots mainly have the following structures.
1、轮式结构,运用车轮结构实现在管道中的运动;1. Wheel structure, using the wheel structure to realize the movement in the pipeline;
2、履带结构,底部配有履带带动机器人在管道内运动;2. Crawler structure, the bottom is equipped with a crawler to drive the robot to move in the pipeline;
3、支撑式结构,采用特殊支撑件支撑在管道内壁上,进而实现管道运动。3. The supporting structure adopts special supports to support the inner wall of the pipeline to realize the movement of the pipeline.
但是,以上这些机构不适宜在多弯曲以及具有上下结构中的管道中工作,并且遇到异物可能导致机器人侧翻甚至卡死。However, the above mechanisms are not suitable for working in pipelines with many bends and up and down structures, and encountering foreign objects may cause the robot to roll over or even get stuck.
为了应对各种结构的管道,需要设计出一款新型的管道机器人,使其机动性、灵活性更强,可在管道内自由灵活运动。In order to cope with pipelines of various structures, it is necessary to design a new type of pipeline robot to make it more mobile and flexible, and can move freely and flexibly in the pipeline.
发明内容Contents of the invention
本发明设计一款新型笼式管道飞行器,可实现在管道内部滚动以及飞行两种运动形式。该飞行器不受管道转折结构限制,还可上下飞行运动。The invention designs a novel cage-type pipeline aircraft, which can realize two motion forms of rolling inside the pipeline and flying. The aircraft is not limited by the turning structure of the pipeline, and can also fly up and down.
该笼式管道飞行器分为内外两个部分。内部为四轴八旋翼结构,一个轴上拥有上下两个转向相反的正反浆,通过旋翼旋转产生的推理带动飞行器运动,利用旋转时产生的扭矩差实现飞行器的零半径转向。外部为可滚动的笼式结构,在旋翼推力带动下可以在管道内部滚动或者转向。与此同时,外部框架可以保护内部旋翼不受管壁碰撞。The cage tube aircraft is divided into two parts, inside and outside. The interior is a four-axis eight-rotor structure. There are two positive and negative propellers with opposite directions on one axis. The reasoning generated by the rotation of the rotors drives the movement of the aircraft, and the zero-radius steering of the aircraft is realized by using the torque difference generated during rotation. The outside is a rollable cage structure, which can roll or turn inside the pipe under the thrust of the rotor. At the same time, the outer frame protects the inner rotor from collisions with the tube walls.
该笼式管道飞行器与传统管道机器人相比,运动灵活性更高,运动范围更大,且不易损坏。依靠气流在管道内部运动,受摩擦阻力影响小,且不会打滑。通过旋转扭矩而进行的零半径转向技术可以保证飞行器在管道内部随时随地转向。Compared with the traditional pipeline robot, the cage-type pipeline aircraft has higher motion flexibility, a larger range of motion, and is less prone to damage. Relying on the airflow to move inside the pipe, it is less affected by frictional resistance and will not slip. The zero-radius steering technology through rotational torque can ensure that the aircraft can turn anytime and anywhere inside the pipe.
另外,为了实现实时对管道内部的检测以及飞行器状态的观测,还利用LABVIEW搭建了一个上位机监控平台。In addition, in order to realize the real-time detection of the inside of the pipeline and the observation of the state of the aircraft, a host computer monitoring platform was built using LABVIEW.
附图说明Description of drawings
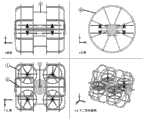
图1是笼式管道飞行器结构设计示意图;Fig. 1 is a schematic diagram of the structural design of the cage-type tube aircraft;
图2是管道飞行器在管道内运动示意图;Fig. 2 is a schematic diagram of the movement of the pipeline aircraft in the pipeline;
图3是上位机监控平台界面;Fig. 3 is the upper computer monitoring platform interface;
具体实施方式Detailed ways
下面结合附图对本发明实施例中的技术方案进行详细描述。The technical solutions in the embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
如图1所示,本发明为一种新型的管道飞行器。由外部轮框和内部结构组成,外部轮框④可采用碳纤维或者模型木板,左右轮框通过轮框衔接尼龙柱⑥连接,并且与中心内轴②同轴,可自由滚动。内部为四轴八旋翼结构,总共有4个轴,每个轴上固定两个旋翼①,其动力原理是依靠八个电机带动八个旋翼旋转,共同产生升力,同时借助上下旋转反向的特点产生扭矩差,控制飞行器转向。为了保证管道飞行器平衡,将电池⑤置于机体最下方,依靠电池的重量将飞行器重心拉低。As shown in Figure 1, the present invention is a novel pipeline aircraft. It consists of an external wheel frame and an internal structure. The
对于飞行器的控制方面,控制器由PSoC4控制器和飞控板③组成,分别负责管道飞行器的姿态采集以及运动控制。For the control of the aircraft, the controller is composed of the PSoC4 controller and the flight control board③, which are respectively responsible for the attitude acquisition and motion control of the pipeline aircraft.
笼式管道飞行器在管道内部的运动形式如图2所示,其中(a)表示管道飞行器在水平管道内依靠倾斜机身,产生向后的推力推动外部轮框滚动前进;(b)表示遇到拐角时,依靠四个轴上的双旋翼结构产生旋转扭矩差,使机体转向,逆时针扭矩时左装,顺时针扭矩时右转;(c)表示当管道飞行器遇到垂直向上的拐角处式,依靠旋翼产生大气流推动飞行器上升;(d)表示依靠气流推力使管道飞行器缓慢下降,保证在下降过程中管道飞行器不受损坏。The movement form of the cage-type pipe aircraft inside the pipe is shown in Figure 2, where (a) indicates that the pipe aircraft relies on tilting the fuselage in the horizontal pipe to generate backward thrust to push the outer wheel frame to roll forward; (b) indicates that it encounters When turning a corner, rely on the dual-rotor structure on the four axes to generate a difference in rotational torque, so that the body turns. When the torque is counterclockwise, it is left, and when it is clockwise, it turns right; (c) means that when the tube aircraft encounters a vertical upward corner, the formula , relying on the rotor to generate atmospheric airflow to push the aircraft up; (d) means relying on the airflow thrust to make the tube aircraft descend slowly, ensuring that the tube aircraft is not damaged during the descent.
图3是该笼式管道飞行器配套的上位机监控平台,可以获取搭载在飞行器上传感器数值信息,也可以实时显示飞行器当前姿态信息。Figure 3 is the monitoring platform of the upper computer supporting the cage-type pipeline aircraft, which can obtain the numerical information of the sensors mounted on the aircraft, and can also display the current attitude information of the aircraft in real time.
Claims (3)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201410007797.8ACN103712035A (en) | 2014-01-08 | 2014-01-08 | Cage type pipeline aircraft |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201410007797.8ACN103712035A (en) | 2014-01-08 | 2014-01-08 | Cage type pipeline aircraft |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103712035Atrue CN103712035A (en) | 2014-04-09 |
Family
ID=50405244
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201410007797.8APendingCN103712035A (en) | 2014-01-08 | 2014-01-08 | Cage type pipeline aircraft |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN103712035A (en) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104590562A (en)* | 2015-02-12 | 2015-05-06 | 马鞍山市赛迪智能科技有限公司 | Anti-collision fixed-point unmanned aerial vehicle for fire control |
| JP2016218813A (en)* | 2015-05-22 | 2016-12-22 | 株式会社日立製作所 | Sewage pipeline facility inspection system |
| JP2017039334A (en)* | 2015-08-17 | 2017-02-23 | 富士通株式会社 | Frame structure for flying machine, flying machine and method for using flying machine |
| CN108238243A (en)* | 2016-12-27 | 2018-07-03 | 中国科学院遥感与数字地球研究所 | 5kg load-carryings length six rotor wing unmanned aerial vehicles of continuation of the journey |
| CN108482661A (en)* | 2018-04-17 | 2018-09-04 | 胡琴 | A kind of petroleum pipeline on-bne repair unmanned plane |
| CN108591675A (en)* | 2018-04-17 | 2018-09-28 | 胡琴 | A kind of petroleum pipeline repair method |
| CN109606678A (en)* | 2018-11-22 | 2019-04-12 | 东南大学 | A crawler-type unmanned aerial vehicle for automatic positioning of bridge supports |
| CN112550508A (en)* | 2020-12-03 | 2021-03-26 | 北京理工大学 | Double-rotor wheel type ground/wall movement robot |
| CN114368435A (en)* | 2022-01-10 | 2022-04-19 | 国网河南省电力公司电力科学研究院 | soft robot |
| US12428140B2 (en) | 2017-04-06 | 2025-09-30 | Acsl Ltd. | Unmanned aerial vehicle, and method for using same |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN201367115Y (en)* | 2008-11-17 | 2009-12-23 | 西安智澜科技发展有限公司 | Foldable four-axis multi-rotor wing aerocraft |
| CN102644831A (en)* | 2012-04-27 | 2012-08-22 | 东北石油大学 | Drive travelling mechanism of peristaltic pipeline robot |
| CN202598023U (en)* | 2012-01-06 | 2012-12-12 | 中国矿业大学 | Variable-diameter wheel type pipeline robot |
| CN102954314A (en)* | 2012-11-21 | 2013-03-06 | 北京石油化工学院 | Pipeline robot dragging mechanism |
- 2014
- 2014-01-08CNCN201410007797.8Apatent/CN103712035A/enactivePending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN201367115Y (en)* | 2008-11-17 | 2009-12-23 | 西安智澜科技发展有限公司 | Foldable four-axis multi-rotor wing aerocraft |
| CN202598023U (en)* | 2012-01-06 | 2012-12-12 | 中国矿业大学 | Variable-diameter wheel type pipeline robot |
| CN102644831A (en)* | 2012-04-27 | 2012-08-22 | 东北石油大学 | Drive travelling mechanism of peristaltic pipeline robot |
| CN102954314A (en)* | 2012-11-21 | 2013-03-06 | 北京石油化工学院 | Pipeline robot dragging mechanism |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104590562A (en)* | 2015-02-12 | 2015-05-06 | 马鞍山市赛迪智能科技有限公司 | Anti-collision fixed-point unmanned aerial vehicle for fire control |
| JP2016218813A (en)* | 2015-05-22 | 2016-12-22 | 株式会社日立製作所 | Sewage pipeline facility inspection system |
| JP2017039334A (en)* | 2015-08-17 | 2017-02-23 | 富士通株式会社 | Frame structure for flying machine, flying machine and method for using flying machine |
| CN108238243A (en)* | 2016-12-27 | 2018-07-03 | 中国科学院遥感与数字地球研究所 | 5kg load-carryings length six rotor wing unmanned aerial vehicles of continuation of the journey |
| US12428140B2 (en) | 2017-04-06 | 2025-09-30 | Acsl Ltd. | Unmanned aerial vehicle, and method for using same |
| CN108482661A (en)* | 2018-04-17 | 2018-09-04 | 胡琴 | A kind of petroleum pipeline on-bne repair unmanned plane |
| CN108591675A (en)* | 2018-04-17 | 2018-09-28 | 胡琴 | A kind of petroleum pipeline repair method |
| CN108591675B (en)* | 2018-04-17 | 2019-10-11 | 山东中石大工程设计有限公司 | A kind of petroleum pipeline repair method |
| CN109606678A (en)* | 2018-11-22 | 2019-04-12 | 东南大学 | A crawler-type unmanned aerial vehicle for automatic positioning of bridge supports |
| CN109606678B (en)* | 2018-11-22 | 2021-09-07 | 东南大学 | A crawler-type unmanned aerial vehicle for automatic positioning of bridge supports |
| CN112550508B (en)* | 2020-12-03 | 2021-11-09 | 北京理工大学 | Double-rotor wheel type floor movement robot |
| CN112550508A (en)* | 2020-12-03 | 2021-03-26 | 北京理工大学 | Double-rotor wheel type ground/wall movement robot |
| CN114368435A (en)* | 2022-01-10 | 2022-04-19 | 国网河南省电力公司电力科学研究院 | soft robot |
| CN114368435B (en)* | 2022-01-10 | 2023-07-18 | 国网河南省电力公司电力科学研究院 | soft robot |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103712035A (en) | Cage type pipeline aircraft | |
| Fang et al. | Design and technical development of wall-climbing robots: A review | |
| CN102390528B (en) | An air-flying and omnidirectional adsorption microrobot | |
| CN105034729B (en) | Deformable multi-mode ground and air flying robot | |
| CN104709196B (en) | Electric lifting chassis for field operation robot | |
| CN104015828B (en) | A kind of bionic flapping-wing and spring multi-mode kinematic robot | |
| CN203996532U (en) | A kind of wheel leg type composite machine people | |
| CN203266635U (en) | Wheel-type S-shaped robot | |
| CN211032070U (en) | A land and air inspection robot | |
| CN101704416B (en) | Lunar vehicle | |
| CN201545089U (en) | A wall-mounted mobile robot capable of crossing intersecting walls | |
| CN203839819U (en) | An obstacle-surmounting robotic arm suitable for transmission line inspection robots | |
| CN206766332U (en) | One kind four rotor wing unmanned aerial vehicles of crawl | |
| CN109981042A (en) | A kind of clean intelligent robot of solar panel based on more rotors | |
| CN103523110B (en) | One kind is wheeled climbs wall barrier-surpassing robot | |
| CN103465992A (en) | Jet spherical robot | |
| CN112829846B (en) | Wall climbing robot and wall transition method thereof | |
| CN110329391A (en) | A kind of Guo Zhang mechanism and its wheel undercarriage component and the application on crusing robot | |
| CN112027065A (en) | Four-rotor unmanned aerial vehicle with terrain self-adaptive take-off and landing and walking functions | |
| CN205574270U (en) | Delivery manipulator based on four rotor crafts | |
| CN112572633A (en) | Biped wall-climbing robot mechanism | |
| CN204368417U (en) | Novel four rotor amphibious robots | |
| Ali et al. | LizBOT design and prototyping of a wireless controlled wall climbing surveillance robot | |
| CN204173039U (en) | A kind of substation four wheel drive crusing robot | |
| CN204472947U (en) | A kind of many areal, fluid absorption type Climbing Robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication | Application publication date:20140409 |