CN103353758A - Indoor robot navigation device and navigation technology thereof - Google Patents
Indoor robot navigation device and navigation technology thereofDownload PDFInfo
- Publication number
- CN103353758A CN103353758ACN2013103374492ACN201310337449ACN103353758ACN 103353758 ACN103353758 ACN 103353758ACN 2013103374492 ACN2013103374492 ACN 2013103374492ACN 201310337449 ACN201310337449 ACN 201310337449ACN 103353758 ACN103353758 ACN 103353758A
- Authority
- CN
- China
- Prior art keywords
- robot
- navigation
- module
- positioning
- area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Translated fromChineseDescription
Translated fromChinese技术领域technical field
本发明属于室内机器人的导航设备及其导航技术,具体地说,涉及一种基于区域细化和视觉定位的室内机器人导航装置及其导航技术。The invention belongs to indoor robot navigation equipment and its navigation technology, in particular to an indoor robot navigation device and its navigation technology based on area refinement and visual positioning.
背景技术Background technique
移动机器人是一种在可复杂环境下工作,具有自规划、自组织、自适应能力的机器人,具有行动快捷、工作效率高、结构简单、可控性强、安全性好等优势,目前在国内外正在被广泛的应用。Mobile robot is a kind of robot with self-planning, self-organization and self-adaptive ability working in a complex environment. It has the advantages of fast action, high work efficiency, simple structure, strong controllability and good safety. are being widely used.
在移动机器人相关技术研究中,导航技术属于其核心技术,也是实现智能化和自主移动的关键技术。目前常见的导航方式有电磁导航、惯性导航、视觉导航、无线导航、卫星导航、传感器数据导航等等。传统的导航方式或多或少存在着一些弊端,电磁导航灵活性差,定位不准确,智能性不高且大面积磁条铺设维护成本高。惯性导航灵活性好,但定位准确度差,运动过程中容易产生并积累偏差,适合于短距离移动。传统的视觉导航一般采用多目视觉的方式,定位精度可以达到很高,但在运动过程中的实时运算量很大,不够灵活,且受光照等周围环境的影响比较大;其他导航方式或多或少存在着稳定性差、定位精度低、或布设维护成本高等缺点。In the research of mobile robot-related technologies, navigation technology is its core technology, and it is also the key technology to realize intelligent and autonomous movement. At present, the common navigation methods include electromagnetic navigation, inertial navigation, visual navigation, wireless navigation, satellite navigation, sensor data navigation and so on. The traditional navigation methods have more or less disadvantages, such as poor flexibility of electromagnetic navigation, inaccurate positioning, low intelligence and high maintenance costs for laying large-scale magnetic strips. Inertial navigation has good flexibility, but its positioning accuracy is poor, and it is easy to generate and accumulate deviations during the movement process, so it is suitable for short-distance movement. Traditional visual navigation generally adopts multi-eye vision, which can achieve high positioning accuracy, but the amount of real-time calculations during the movement is large, not flexible enough, and it is greatly affected by the surrounding environment such as lighting; other navigation methods or multiple At least there are disadvantages such as poor stability, low positioning accuracy, or high layout and maintenance costs.
发明内容Contents of the invention
本发明要解决的技术问题是克服上述缺陷,提供一种成本低,适应型和稳定性好,导航和定位精度高的基于区域细化和视觉定位的室内机器人导航装置。The technical problem to be solved by the present invention is to overcome the above defects and provide an indoor robot navigation device based on area refinement and visual positioning with low cost, good adaptability and stability, and high navigation and positioning accuracy.
为解决上述问题,本发明所采用的技术方案是:In order to solve the above problems, the technical solution adopted in the present invention is:
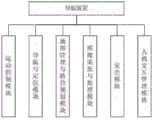
一种室内机器人导航装置,其特征在于,包括电路板,电路板上设置有运动控制模块、导航与定位模块、地图管理与路径规划模块、图像采集与处理模块、安全模块、人机交互管理模块;An indoor robot navigation device, characterized in that it includes a circuit board, and the circuit board is provided with a motion control module, a navigation and positioning module, a map management and path planning module, an image acquisition and processing module, a security module, and a human-computer interaction management module ;
运动控制模块,用于机器人的运动姿态调整和运动状态控制;The motion control module is used for the motion posture adjustment and motion state control of the robot;
导航与定位模块,通过惯性导航和视觉校正来获取机器人的准确位置,实现精确地机器人导航定位;The navigation and positioning module obtains the accurate position of the robot through inertial navigation and visual correction, and realizes precise robot navigation and positioning;
地图管理与路径规划模块,用于地图的构建和细化,机器人运动路径的规划;Map management and path planning module, used for map construction and refinement, robot motion path planning;
图像采集与处理模块,采集并处理路标图像,获取当前机器人的位置,及时进行运动控制和姿态调整;The image acquisition and processing module collects and processes road sign images, obtains the current position of the robot, and performs motion control and attitude adjustment in time;
安全模块,定时检测装置自身的安全状态,并执行相应的报警处理;The safety module regularly detects the safety state of the device itself, and executes corresponding alarm processing;
人机交互管理模块,通过多种人机接口实现人机交互通讯、显示、配置和管理。Human-computer interaction management module realizes communication, display, configuration and management of human-computer interaction through various human-computer interfaces.
本发明还提供了一种室内机器人导航技术,其特征在于:The present invention also provides a kind of indoor robot navigation technology, it is characterized in that:
步骤如下:Proceed as follows:
a)、地图构建与机器人运动路径的规划;a) Map construction and robot movement path planning;
b)、区域细化与视觉路标的设定;b) Regional refinement and setting of visual landmarks;
c)、视觉路标的采集、处理和运动定位校正;c), collection, processing and motion positioning correction of visual landmarks;
d)、区域和路标信息的存储与查询。d) Storage and query of area and road sign information.
作为一种改进的技术方案,所述步骤a)具体为:As an improved technical solution, the step a) is specifically:
1)、对室内环境布局进行度量,并在设备离线状态下构建地图;1) Measure the layout of the indoor environment and build a map when the device is offline;
2)、设定机器人的运动区域,并规划机器人在室内整体的运动路径;2) Set the movement area of the robot and plan the overall movement path of the robot indoors;
3)、设定特定点之间机器人的运动路径,并且在设定范围之外的其他情况,运动路径由机器人自主计算。3) Set the movement path of the robot between specific points, and in other cases outside the set range, the movement path is automatically calculated by the robot.
作为一种改进的技术方案,所述步骤b)具体为:As an improved technical solution, the step b) is specifically:
1)、将地图中机器人的运动区域按照运动路径的形式细分成多个不同大小和形状的区域;1) Subdivide the movement area of the robot in the map into multiple areas of different sizes and shapes according to the form of the movement path;
2)、在每个细分区域中机器人运动路径的特定位置处设定视觉路标。2) Set visual landmarks at specific positions of the robot's motion path in each subdivision area.
作为一种改进的技术方案,步骤c)具体为:As an improved technical solution, step c) is specifically:
1)当机器人运动到路标位置附近时,瞬时采集路标图像,提取图像的定位点。1) When the robot moves near the position of the landmark, the image of the landmark is collected instantaneously, and the positioning point of the image is extracted.
2)根据路标定位信息,获取机器人当前的位置,及时进行运动控制。2) Obtain the current position of the robot according to the positioning information of the road signs, and perform motion control in time.
作为一种改进的技术方案,步骤d)具体为:As an improved technical solution, step d) is specifically:
1)将每个细分区域的位置、形状、区域中的路径信息、运动方式和路标点位置以及路标对应物品的方位等信息以YAML格式进行存储。1) Store information such as the position, shape, path information in the area, movement mode, landmark position, and orientation of the corresponding items of each subdivision area in YAML format.
2)机器人运动过程中查询当前细分区域的信息,及时进行运动控制和定位导航。2) During the movement of the robot, query the information of the current subdivision area, and perform motion control and positioning navigation in time.
作为一种改进的技术方案,对机器人运动路径附近的地图进行区域细化处理,并将细化区域内的多种位置、运动和控制信息进行重点存储,以达到提高控制精度和运行效率的目的。As an improved technical solution, the map near the robot's motion path is refined, and various positions, motions, and control information in the refined area are stored in order to achieve the purpose of improving control accuracy and operating efficiency. .
作为一种改进的技术方案,设定视觉路标是采用单目视觉的方式对机器人进行定位导航,一方面在运动过程中定点采集视觉路标图像,获取当前的定位信息,及时进行运动控制;另一方面使得机器人能精确移动到目标点位置,根据目标物的空间信息,调整姿态。As an improved technical solution, setting visual landmarks is to use monocular vision to locate and navigate the robot. On the one hand, the images of visual landmarks are collected at fixed points during the movement process, and the current positioning information is obtained to perform motion control in time. On the one hand, the robot can accurately move to the position of the target point, and adjust the posture according to the spatial information of the target.
由于采用了上述技术方案,与现有技术相比,本发明具有着自主导航、抗干扰能力强、无轨迹移动等优点,也通过视觉定位校准来克服了目前大多数导航方式定位精度差的问题。此外,视觉系统采用单目视觉,定点触发采集处理,相对于双目视觉实时定位导航的方式运算量要小的多,成本低,稳定性好。Due to the adoption of the above-mentioned technical solution, compared with the prior art, the present invention has the advantages of autonomous navigation, strong anti-interference ability, trackless movement, etc., and also overcomes the problem of poor positioning accuracy of most current navigation methods through visual positioning calibration . In addition, the vision system adopts monocular vision and fixed-point trigger acquisition processing. Compared with binocular vision real-time positioning and navigation, the calculation amount is much smaller, the cost is low, and the stability is good.
本发明在地图构建时采用了区域细化的方式,同时针对细化区域存储了大量的位置和控制信息,提高了机器人的运动控制精度和效率。The present invention adopts the method of area refinement when constructing the map, and stores a large amount of position and control information for the refinement area at the same time, thereby improving the motion control precision and efficiency of the robot.
本发明充分考虑到了布设在地面上的图像路标难免受到灰尘、脏污等干扰,采用了实圆的图像编码结构,其优点在于:一方面圆的检测采用统计投票的方式,有着很好的抗干扰能力;另一方面相对于单线圆而言,实体圆的鲁棒性更好。此外,定位圆相对于图像的大小和位置是固定的,因此中心定位速度非常快,可确保及时进行运动校正。The present invention fully considers that the image road signs arranged on the ground will inevitably be disturbed by dust, dirt, etc., and adopts a solid circle image coding structure. Interference ability; on the other hand, compared with the single-line circle, the robustness of the solid circle is better. Additionally, the size and position of the positioning circle relative to the image is fixed, so centering is very fast, ensuring timely motion correction.
同时下面结合附图和具体实施方式对本发明作进一步说明。At the same time, the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
附图说明Description of drawings
图1为本发明一种实施例的结构框图;Fig. 1 is a structural block diagram of an embodiment of the present invention;
图2为本发明一种实施例的工作流程图。Fig. 2 is a working flow diagram of an embodiment of the present invention.
具体实施方式Detailed ways
实施例:Example:
如图1所示,一种基于区域细化和视觉定位的室内机器人导航装置,包括电路板,电路板上设置有运动控制模块、导航与定位模块、地图管理与路径规划模块、图像采集与处理模块、安全模块、人机交互管理模块。As shown in Figure 1, an indoor robot navigation device based on area refinement and visual positioning includes a circuit board, which is equipped with a motion control module, a navigation and positioning module, a map management and path planning module, image acquisition and processing module, security module, human-computer interaction management module.
运动控制模块,用于机器人的运动姿态调整和运动状态控制。The motion control module is used for the motion posture adjustment and motion state control of the robot.
导航与定位模块,通过惯性导航和视觉校正来获取机器人的准确位置,实现精确地机器人导航定位。The navigation and positioning module obtains the accurate position of the robot through inertial navigation and visual correction, and realizes precise robot navigation and positioning.
地图管理与路径规划模块,用于地图的构建和细化,机器人运动路径的规划。The map management and path planning module is used for map construction and refinement, and robot motion path planning.
图像采集与处理模块,采集并处理路标图像,获取当前机器人的位置,及时进行运动控制和姿态调整。The image acquisition and processing module collects and processes road sign images, obtains the current position of the robot, and performs motion control and attitude adjustment in time.
安全模块,定时检测装置自身的安全状态,并执行相应的报警处理。The safety module regularly detects the safety state of the device itself, and executes corresponding alarm processing.
人机交互管理模块,通过多种人机接口实现人机交互通讯、显示、配置和管理。Human-computer interaction management module realizes communication, display, configuration and management of human-computer interaction through various human-computer interfaces.
本发明还提供了一种基于区域细化和视觉定位的室内机器人导航技术,如图2所示,步骤如下:The present invention also provides an indoor robot navigation technology based on area refinement and visual positioning, as shown in Figure 2, the steps are as follows:
a)、地图构建与机器人运动路径的规划;a) Map construction and robot movement path planning;
b)、区域细化与视觉路标的设定;b) Regional refinement and setting of visual landmarks;
c)、视觉路标的采集、处理和运动定位校正;c), collection, processing and motion positioning correction of visual landmarks;
d)、区域和路标信息的存储与查询。d) Storage and query of area and road sign information.
在上述步骤中,所述步骤a)具体为:In the above steps, the step a) is specifically:
1)、对室内环境布局进行度量,并在设备离线状态下构建地图;1) Measure the layout of the indoor environment and build a map when the device is offline;
2)、设定机器人的运动区域,并规划机器人在室内整体的运动路径;2) Set the movement area of the robot and plan the overall movement path of the robot indoors;
3)、设定特定点之间机器人的运动路径,并且在设定范围之外的其他情况,运动路径由机器人自主计算。3) Set the movement path of the robot between specific points, and in other cases outside the set range, the movement path is automatically calculated by the robot.
所述步骤b)具体为:The step b) is specifically:
1)、将地图中机器人的运动区域按照运动路径的形式细分成多个不同大小和形状的区域;1) Subdivide the movement area of the robot in the map into multiple areas of different sizes and shapes according to the form of the movement path;
2)、在每个细分区域中机器人运动路径的特定位置处设定视觉路标。2) Set visual landmarks at specific positions of the robot's motion path in each subdivision area.
步骤c)具体为:Step c) is specifically:
1)当机器人运动到路标位置附近时,瞬时采集路标图像,提取图像的定位点。1) When the robot moves near the position of the landmark, the image of the landmark is collected instantaneously, and the positioning point of the image is extracted.
2)根据路标定位信息,获取机器人当前的位置,及时进行运动控制。2) Obtain the current position of the robot according to the positioning information of the road signs, and perform motion control in time.
步骤d)具体为:Step d) is specifically:
1)将每个细分区域的位置、形状、区域中的路径信息、运动方式和路标点位置以及路标对应物品的方位等信息以YAML格式进行存储。1) Store information such as the position, shape, path information in the area, movement mode, landmark position, and orientation of the corresponding items of each subdivision area in YAML format.
2)机器人运动过程中查询当前细分区域的信息,及时进行运动控制和定位导航。2) During the movement of the robot, query the information of the current subdivision area, and perform motion control and positioning navigation in time.
在本实施例中,对机器人运动路径附近的地图进行区域细化处理,并将细化区域内的多种位置、运动和控制信息进行重点存储,以达到提高控制精度和运行效率的目的。In this embodiment, the map near the robot's motion path is subdivided, and various positions, motions and control information in the subdivided area are stored in order to achieve the purpose of improving control accuracy and operating efficiency.
在本实施例中,设定视觉路标是采用单目视觉的方式对机器人进行定位导航,一方面在运动过程中定点采集视觉路标图像,获取当前的定位信息,及时进行运动控制;另一方面使得机器人能精确移动到目标点位置,根据目标物的空间信息,调整姿态。In this embodiment, the setting of visual landmarks is to use monocular vision to position and navigate the robot. On the one hand, the images of visual landmarks are collected at fixed points during the movement, to obtain current positioning information, and to perform motion control in time; The robot can accurately move to the position of the target point, and adjust its posture according to the spatial information of the target.
本发明具有着自主导航、抗干扰能力强、无轨迹移动等优点,也通过视觉定位校准来克服了目前大多数导航方式定位精度差的问题。此外,视觉系统采用单目视觉,定点触发采集处理,相对于双目视觉实时定位导航的方式运算量要小的多,成本低,稳定性好。The invention has the advantages of autonomous navigation, strong anti-interference ability, no track movement, etc., and also overcomes the problem of poor positioning accuracy of most current navigation methods through visual positioning calibration. In addition, the vision system adopts monocular vision and fixed-point trigger acquisition processing. Compared with binocular vision real-time positioning and navigation, the calculation amount is much smaller, the cost is low, and the stability is good.
本发明在地图构建时采用了区域细化的方式,同时针对细化区域存储了大量的位置和控制信息,提高了机器人的运动控制精度和效率。The present invention adopts the method of area refinement when constructing the map, and stores a large amount of position and control information for the refinement area at the same time, thereby improving the motion control precision and efficiency of the robot.
本发明充分考虑到了布设在地面上的图像路标难免受到灰尘、脏污等干扰,采用了实圆的图像编码结构,其优点在于:一方面圆的检测采用统计投票的方式,有着很好的抗干扰能力;另一方面相对于单线圆而言,实体圆的鲁棒性更好。此外,定位圆相对于图像的大小和位置是固定的,因此中心定位速度非常快,可确保及时进行运动校正。The present invention fully considers that the image road signs arranged on the ground will inevitably be disturbed by dust, dirt, etc., and adopts a solid circle image coding structure. Interference ability; on the other hand, compared with the single-line circle, the robustness of the solid circle is better. Additionally, the size and position of the positioning circle relative to the image is fixed, so centering is very fast, ensuring timely motion correction.
本发明不局限于上述的优选实施方式,任何人应该得知在本发明的启示下做出的结构变化,凡是与本发明具有相同或者相近似的技术方案,均属于本发明的保护范围。The present invention is not limited to the preferred embodiment described above, and anyone should know that any structural changes made under the inspiration of the present invention, and any technical solutions that are the same as or similar to the present invention, all belong to the protection scope of the present invention.
Claims (8)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310337449.2ACN103353758B (en) | 2013-08-05 | 2013-08-05 | A kind of Indoor Robot navigation method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310337449.2ACN103353758B (en) | 2013-08-05 | 2013-08-05 | A kind of Indoor Robot navigation method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN103353758Atrue CN103353758A (en) | 2013-10-16 |
| CN103353758B CN103353758B (en) | 2016-06-01 |
Family
ID=49310138
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201310337449.2AActiveCN103353758B (en) | 2013-08-05 | 2013-08-05 | A kind of Indoor Robot navigation method |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN103353758B (en) |
Cited By (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103777200A (en)* | 2013-12-16 | 2014-05-07 | 重庆大学 | RFID positioning node arrangement method for mobile robot, and RFID auxiliary positioning navigation method for mobile robot |
| CN104236540A (en)* | 2014-06-24 | 2014-12-24 | 上海大学 | Indoor passive navigation and positioning system and indoor passive navigation and positioning method |
| CN104596533A (en)* | 2015-01-07 | 2015-05-06 | 上海交通大学 | Automatic guided vehicle based on map matching and guide method of automatic guided vehicle |
| CN104914865A (en)* | 2015-05-29 | 2015-09-16 | 国网山东省电力公司电力科学研究院 | Transformer station inspection tour robot positioning navigation system and method |
| CN105425807A (en)* | 2016-01-07 | 2016-03-23 | 朱明� | Indoor robot navigation method and apparatus based on artificial road sign |
| CN105486311A (en)* | 2015-12-24 | 2016-04-13 | 青岛海通机器人系统有限公司 | Indoor robot positioning navigation method and device |
| CN105589460A (en)* | 2015-05-19 | 2016-05-18 | 中国人民解放军国防科学技术大学 | Method and device for controlling mobile vehicle body |
| CN105607635A (en)* | 2016-01-05 | 2016-05-25 | 东莞市松迪智能机器人科技有限公司 | Automatic guided vehicle panoramic optical vision navigation control system and omnidirectional automatic guided vehicle |
| CN105729008A (en)* | 2016-04-28 | 2016-07-06 | 广东省自动化研究所 | Method for precisely positioning trackless mobile welding robots |
| CN105759825A (en)* | 2016-05-18 | 2016-07-13 | 刘学良 | A positioning control algorithm for AGV robot based on fuzzy PID |
| CN105856243A (en)* | 2016-06-28 | 2016-08-17 | 湖南科瑞特科技股份有限公司 | Movable intelligent robot |
| CN106066179A (en)* | 2016-07-27 | 2016-11-02 | 湖南晖龙股份有限公司 | A kind of robot location based on ROS operating system loses method for retrieving and control system |
| CN106324616A (en)* | 2016-09-28 | 2017-01-11 | 深圳市普渡科技有限公司 | Map construction method based on inertial navigation unit and laser radar |
| CN106323281A (en)* | 2015-06-23 | 2017-01-11 | 北京冰果科技有限公司 | Indoor space positioning method |
| CN106403941A (en)* | 2016-08-29 | 2017-02-15 | 上海智臻智能网络科技股份有限公司 | Positioning method and positioning apparatus |
| CN106647742A (en)* | 2016-10-31 | 2017-05-10 | 纳恩博(北京)科技有限公司 | Moving path planning method and device |
| CN106646341A (en)* | 2017-02-28 | 2017-05-10 | 上海帆煜自动化科技有限公司 | Indoor robot navigation device |
| CN106896807A (en)* | 2015-12-17 | 2017-06-27 | 卡西欧计算机株式会社 | Autonomous device and autonomous method |
| CN106960591A (en)* | 2017-03-31 | 2017-07-18 | 武汉理工大学 | A kind of vehicle high-precision positioner and method based on road surface fingerprint |
| CN107160403A (en)* | 2017-06-30 | 2017-09-15 | 海南职业技术学院 | A kind of intelligent robot system with multi-functional human-machine interface module |
| CN107265355A (en)* | 2017-07-06 | 2017-10-20 | 青岛海通胜行智能科技有限公司 | A kind of intelligence selection fork truck system navigated based on intelligence wearing and natural environment |
| CN107918396A (en)* | 2017-11-30 | 2018-04-17 | 深圳市智能机器人研究院 | A kind of underwater cleaning robot paths planning method and system based on hull model |
| CN108303972A (en)* | 2017-10-31 | 2018-07-20 | 腾讯科技(深圳)有限公司 | The exchange method and device of mobile robot |
| CN108789432A (en)* | 2018-06-12 | 2018-11-13 | 芜湖乐创电子科技有限公司 | Control system for hiding robot based on positioning logic |
| CN108873914A (en)* | 2018-09-21 | 2018-11-23 | 长安大学 | A kind of robot autonomous navigation system and method based on depth image data |
| CN109533757A (en)* | 2018-12-25 | 2019-03-29 | 北京极智嘉科技有限公司 | A kind of robot, navigation mode-switching method and the medium of changeable navigation mode |
| TWI656423B (en)* | 2016-11-09 | 2019-04-11 | 日商東芝生活電器股份有限公司 | Autonomous walking body |
| CN110175540A (en)* | 2019-05-11 | 2019-08-27 | 深圳市普渡科技有限公司 | Road sign map structuring system and robot |
| CN110411446A (en)* | 2018-04-28 | 2019-11-05 | 深圳果力智能科技有限公司 | A kind of paths planning method of robot |
| WO2019237990A1 (en)* | 2018-06-15 | 2019-12-19 | 科沃斯机器人股份有限公司 | Robot localizing method, robot, and storage medium |
| CN111683517A (en)* | 2018-02-13 | 2020-09-18 | 罗伯特·博世有限公司 | Autonomous agricultural system and method for operating an agricultural system |
| CN112783009A (en)* | 2019-11-05 | 2021-05-11 | 沈阳新松机器人自动化股份有限公司 | General main controller for AGV (automatic guided vehicle) of mobile robot |
| CN113697501A (en)* | 2017-04-14 | 2021-11-26 | 株式会社大福 | Article conveying apparatus |
| CN114199261A (en)* | 2021-12-01 | 2022-03-18 | 广东开放大学(广东理工职业学院) | Aruco code-based mobile robot visual positioning and navigation method |
| CN115063549A (en)* | 2022-06-17 | 2022-09-16 | 江西省智能产业技术创新研究院 | Map construction method, system, electronic device and storage medium based on roadmap |
| CN115752425A (en)* | 2021-09-03 | 2023-03-07 | 华为技术有限公司 | Positioning method and device |
| CN116197892A (en)* | 2021-11-30 | 2023-06-02 | 珠海一微半导体股份有限公司 | A method for establishing a ceiling vision robot landmark and a ceiling vision robot |
| CN116339346A (en)* | 2023-04-24 | 2023-06-27 | 北京云迹科技股份有限公司 | A multi-scenario robotic IoT system |
| CN116859909A (en)* | 2023-05-29 | 2023-10-10 | 河南清智智能科技研究院有限公司 | Path planning method for intelligent robot |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020052684A1 (en)* | 1997-06-03 | 2002-05-02 | Stephen Bide | Portable information-providing apparatus |
| US20040186623A1 (en)* | 2001-05-25 | 2004-09-23 | Mike Dooley | Toy robot programming |
| CN102435188A (en)* | 2011-09-15 | 2012-05-02 | 南京航空航天大学 | A Monocular Vision/Inertial Fully Autonomous Navigation Method for Indoor Environment |
| CN202255404U (en)* | 2011-08-24 | 2012-05-30 | 国营红林机械厂 | Binocular vision navigation system of indoor mobile robot |
| CN102596517A (en)* | 2009-07-28 | 2012-07-18 | 悠进机器人股份公司 | Control method for localization and navigation of mobile robot and mobile robot using same |
| CN102853830A (en)* | 2012-09-03 | 2013-01-02 | 东南大学 | Robot vision navigation method based on general object recognition |
| CN102914303A (en)* | 2012-10-11 | 2013-02-06 | 江苏科技大学 | Navigation information acquisition method and intelligent space system with multiple mobile robots |
- 2013
- 2013-08-05CNCN201310337449.2Apatent/CN103353758B/enactiveActive
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020052684A1 (en)* | 1997-06-03 | 2002-05-02 | Stephen Bide | Portable information-providing apparatus |
| US20040186623A1 (en)* | 2001-05-25 | 2004-09-23 | Mike Dooley | Toy robot programming |
| CN102596517A (en)* | 2009-07-28 | 2012-07-18 | 悠进机器人股份公司 | Control method for localization and navigation of mobile robot and mobile robot using same |
| US20120191287A1 (en)* | 2009-07-28 | 2012-07-26 | Yujin Robot Co., Ltd. | Control method for localization and navigation of mobile robot and mobile robot using the same |
| CN202255404U (en)* | 2011-08-24 | 2012-05-30 | 国营红林机械厂 | Binocular vision navigation system of indoor mobile robot |
| CN102435188A (en)* | 2011-09-15 | 2012-05-02 | 南京航空航天大学 | A Monocular Vision/Inertial Fully Autonomous Navigation Method for Indoor Environment |
| CN102853830A (en)* | 2012-09-03 | 2013-01-02 | 东南大学 | Robot vision navigation method based on general object recognition |
| CN102914303A (en)* | 2012-10-11 | 2013-02-06 | 江苏科技大学 | Navigation information acquisition method and intelligent space system with multiple mobile robots |
Cited By (58)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103777200A (en)* | 2013-12-16 | 2014-05-07 | 重庆大学 | RFID positioning node arrangement method for mobile robot, and RFID auxiliary positioning navigation method for mobile robot |
| CN104236540A (en)* | 2014-06-24 | 2014-12-24 | 上海大学 | Indoor passive navigation and positioning system and indoor passive navigation and positioning method |
| CN104596533A (en)* | 2015-01-07 | 2015-05-06 | 上海交通大学 | Automatic guided vehicle based on map matching and guide method of automatic guided vehicle |
| CN104596533B (en)* | 2015-01-07 | 2017-08-01 | 上海交通大学 | Automatic guided vehicle and its guidance method based on map matching |
| CN105589460A (en)* | 2015-05-19 | 2016-05-18 | 中国人民解放军国防科学技术大学 | Method and device for controlling mobile vehicle body |
| CN105589460B (en)* | 2015-05-19 | 2019-07-12 | 中国人民解放军国防科学技术大学 | A kind of method and device of control movement car body |
| CN104914865A (en)* | 2015-05-29 | 2015-09-16 | 国网山东省电力公司电力科学研究院 | Transformer station inspection tour robot positioning navigation system and method |
| CN106323281B (en)* | 2015-06-23 | 2019-02-01 | 北京冰果科技有限公司 | Indoor space locating method |
| CN106323281A (en)* | 2015-06-23 | 2017-01-11 | 北京冰果科技有限公司 | Indoor space positioning method |
| CN106896807B (en)* | 2015-12-17 | 2020-02-28 | 卡西欧计算机株式会社 | Autonomous mobile device, autonomous mobile method, and recording medium |
| CN106896807A (en)* | 2015-12-17 | 2017-06-27 | 卡西欧计算机株式会社 | Autonomous device and autonomous method |
| CN105486311A (en)* | 2015-12-24 | 2016-04-13 | 青岛海通机器人系统有限公司 | Indoor robot positioning navigation method and device |
| CN105607635A (en)* | 2016-01-05 | 2016-05-25 | 东莞市松迪智能机器人科技有限公司 | Automatic guided vehicle panoramic optical vision navigation control system and omnidirectional automatic guided vehicle |
| CN105607635B (en)* | 2016-01-05 | 2018-12-14 | 东莞市松迪智能机器人科技有限公司 | Panoramic optical vision navigation control system of automatic guided vehicle and omnidirectional automatic guided vehicle |
| CN105425807B (en)* | 2016-01-07 | 2018-07-03 | 朱明� | A kind of Indoor Robot air navigation aid and device based on artificial landmark |
| CN105425807A (en)* | 2016-01-07 | 2016-03-23 | 朱明� | Indoor robot navigation method and apparatus based on artificial road sign |
| CN105729008A (en)* | 2016-04-28 | 2016-07-06 | 广东省自动化研究所 | Method for precisely positioning trackless mobile welding robots |
| CN105759825A (en)* | 2016-05-18 | 2016-07-13 | 刘学良 | A positioning control algorithm for AGV robot based on fuzzy PID |
| CN105856243A (en)* | 2016-06-28 | 2016-08-17 | 湖南科瑞特科技股份有限公司 | Movable intelligent robot |
| CN106066179A (en)* | 2016-07-27 | 2016-11-02 | 湖南晖龙股份有限公司 | A kind of robot location based on ROS operating system loses method for retrieving and control system |
| CN106403941A (en)* | 2016-08-29 | 2017-02-15 | 上海智臻智能网络科技股份有限公司 | Positioning method and positioning apparatus |
| CN106403941B (en)* | 2016-08-29 | 2019-04-19 | 上海智臻智能网络科技股份有限公司 | A kind of localization method and device |
| CN106324616A (en)* | 2016-09-28 | 2017-01-11 | 深圳市普渡科技有限公司 | Map construction method based on inertial navigation unit and laser radar |
| CN106324616B (en)* | 2016-09-28 | 2019-02-26 | 深圳市普渡科技有限公司 | A kind of map constructing method based on inertial navigation unit and laser radar |
| CN106647742B (en)* | 2016-10-31 | 2019-09-20 | 纳恩博(北京)科技有限公司 | Movement routine method and device for planning |
| CN106647742A (en)* | 2016-10-31 | 2017-05-10 | 纳恩博(北京)科技有限公司 | Moving path planning method and device |
| US11221629B2 (en) | 2016-11-09 | 2022-01-11 | Toshiba Lifestyle Products & Services Corporation | Autonomous traveler and travel control method thereof |
| TWI656423B (en)* | 2016-11-09 | 2019-04-11 | 日商東芝生活電器股份有限公司 | Autonomous walking body |
| CN106646341B (en)* | 2017-02-28 | 2019-04-02 | 深圳供电局有限公司 | Indoor robot navigation device |
| CN106646341A (en)* | 2017-02-28 | 2017-05-10 | 上海帆煜自动化科技有限公司 | Indoor robot navigation device |
| CN106960591A (en)* | 2017-03-31 | 2017-07-18 | 武汉理工大学 | A kind of vehicle high-precision positioner and method based on road surface fingerprint |
| CN106960591B (en)* | 2017-03-31 | 2019-08-27 | 武汉理工大学 | A high-precision vehicle positioning device and method based on road surface fingerprints |
| CN113697501A (en)* | 2017-04-14 | 2021-11-26 | 株式会社大福 | Article conveying apparatus |
| CN107160403A (en)* | 2017-06-30 | 2017-09-15 | 海南职业技术学院 | A kind of intelligent robot system with multi-functional human-machine interface module |
| CN107265355A (en)* | 2017-07-06 | 2017-10-20 | 青岛海通胜行智能科技有限公司 | A kind of intelligence selection fork truck system navigated based on intelligence wearing and natural environment |
| CN108303972A (en)* | 2017-10-31 | 2018-07-20 | 腾讯科技(深圳)有限公司 | The exchange method and device of mobile robot |
| US11142121B2 (en) | 2017-10-31 | 2021-10-12 | Tencent Technology (Shenzhen) Company Limited | Interaction method and apparatus of mobile robot, mobile robot, and storage medium |
| CN107918396A (en)* | 2017-11-30 | 2018-04-17 | 深圳市智能机器人研究院 | A kind of underwater cleaning robot paths planning method and system based on hull model |
| CN111683517A (en)* | 2018-02-13 | 2020-09-18 | 罗伯特·博世有限公司 | Autonomous agricultural system and method for operating an agricultural system |
| CN110411446B (en)* | 2018-04-28 | 2023-09-08 | 深圳果力智能科技有限公司 | Path planning method for robot |
| CN110411446A (en)* | 2018-04-28 | 2019-11-05 | 深圳果力智能科技有限公司 | A kind of paths planning method of robot |
| CN108789432A (en)* | 2018-06-12 | 2018-11-13 | 芜湖乐创电子科技有限公司 | Control system for hiding robot based on positioning logic |
| WO2019237990A1 (en)* | 2018-06-15 | 2019-12-19 | 科沃斯机器人股份有限公司 | Robot localizing method, robot, and storage medium |
| CN108873914A (en)* | 2018-09-21 | 2018-11-23 | 长安大学 | A kind of robot autonomous navigation system and method based on depth image data |
| CN108873914B (en)* | 2018-09-21 | 2021-07-06 | 长安大学 | A robot autonomous navigation system and method based on depth image data |
| CN109533757A (en)* | 2018-12-25 | 2019-03-29 | 北京极智嘉科技有限公司 | A kind of robot, navigation mode-switching method and the medium of changeable navigation mode |
| WO2020135365A1 (en)* | 2018-12-25 | 2020-07-02 | 北京极智嘉科技有限公司 | Robot, navigation mode switching method, and medium |
| CN110175540A (en)* | 2019-05-11 | 2019-08-27 | 深圳市普渡科技有限公司 | Road sign map structuring system and robot |
| CN112783009A (en)* | 2019-11-05 | 2021-05-11 | 沈阳新松机器人自动化股份有限公司 | General main controller for AGV (automatic guided vehicle) of mobile robot |
| CN115752425A (en)* | 2021-09-03 | 2023-03-07 | 华为技术有限公司 | Positioning method and device |
| WO2023030225A1 (en)* | 2021-09-03 | 2023-03-09 | 华为技术有限公司 | Location method and apparatus |
| CN116197892A (en)* | 2021-11-30 | 2023-06-02 | 珠海一微半导体股份有限公司 | A method for establishing a ceiling vision robot landmark and a ceiling vision robot |
| CN114199261A (en)* | 2021-12-01 | 2022-03-18 | 广东开放大学(广东理工职业学院) | Aruco code-based mobile robot visual positioning and navigation method |
| CN115063549A (en)* | 2022-06-17 | 2022-09-16 | 江西省智能产业技术创新研究院 | Map construction method, system, electronic device and storage medium based on roadmap |
| CN115063549B (en)* | 2022-06-17 | 2025-05-09 | 江西省智能产业技术创新研究院 | Map construction method, system, electronic device and storage medium based on roadmap |
| CN116339346A (en)* | 2023-04-24 | 2023-06-27 | 北京云迹科技股份有限公司 | A multi-scenario robotic IoT system |
| CN116859909A (en)* | 2023-05-29 | 2023-10-10 | 河南清智智能科技研究院有限公司 | Path planning method for intelligent robot |
| CN116859909B (en)* | 2023-05-29 | 2024-05-03 | 河南清智智能科技研究院有限公司 | Path planning method for intelligent robot |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103353758B (en) | 2016-06-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103353758B (en) | A kind of Indoor Robot navigation method | |
| CN107356252B (en) | Indoor robot positioning method integrating visual odometer and physical odometer | |
| US20230236280A1 (en) | Method and system for positioning indoor autonomous mobile robot | |
| CN103064416B (en) | Crusing robot indoor and outdoor autonomous navigation system | |
| CN111958592B (en) | A system and method for image semantic analysis of substation inspection robot | |
| CN103294059B (en) | Based on mobile robot positioning system and the method thereof of hybrid navigation band | |
| CN104217439B (en) | Indoor visual positioning system and method | |
| CN102735217B (en) | Indoor robot vision autonomous positioning method | |
| KR20190077481A (en) | Robot mapping system and method | |
| CN108873908A (en) | The robot city navigation system that view-based access control model SLAM and network map combine | |
| CN107144281B (en) | Unmanned aerial vehicle indoor positioning system and positioning method based on cooperative targets and monocular vision | |
| CN205898143U (en) | Robot navigation system based on machine vision and laser sensor fuse | |
| CN106168805A (en) | The method of robot autonomous walking based on cloud computing | |
| CN103926933A (en) | Indoor simultaneous locating and environment modeling method for unmanned aerial vehicle | |
| CN105044754A (en) | Mobile platform outdoor positioning method based on multi-sensor fusion | |
| CN103324194A (en) | Mobile robot positioning system based on two-dimension code navigation band | |
| CN116352722A (en) | Multi-sensor fused mine inspection rescue robot and control method thereof | |
| CN104236540A (en) | Indoor passive navigation and positioning system and indoor passive navigation and positioning method | |
| CN104729502A (en) | Robot mapping and positioning method and system based on Bluetooth base station and laser sensor | |
| CN104848848A (en) | Robot map drafting and positioning method based on wireless base station and laser sensor as well as system thereof | |
| CN105004336A (en) | Robot positioning method | |
| CN111982099A (en) | Robot hybrid positioning method, device, equipment and computer readable medium | |
| CN104089649A (en) | System and method for collecting indoor environment data | |
| CN107302754A (en) | A kind of indoor positioning simple and easy method based on WiFi and PDR | |
| CN111958593A (en) | A visual servo method and system for a semantic intelligent substation inspection robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CP03 | Change of name, title or address | Address after:215100 building 3, Tianlong science and Technology Park, No. 1, Zhufeng Road, Mudu Town, Wuzhong District, Suzhou City, Jiangsu Province Patentee after:Suzhou Haitong Robot System Co.,Ltd. Address before:266101 rooms 901, 1002 and 1003, building 1, No. 153, Zhuzhou Road, Laoshan District, Qingdao, Shandong Province Patentee before:QINGDAO HTAGV ROBOT SYSTEMS CO.,LTD. | |
| CP03 | Change of name, title or address | ||
| PE01 | Entry into force of the registration of the contract for pledge of patent right | Denomination of invention:A navigation method for indoor robots Granted publication date:20160601 Pledgee:Bank of China Limited Suzhou Wuzhong sub branch Pledgor:Suzhou Haitong Robot System Co.,Ltd. Registration number:Y2025980022981 | |
| PE01 | Entry into force of the registration of the contract for pledge of patent right |