CN103182159A - Lower limb rehabilitation training device based on electro-oculogram signal control - Google Patents
Lower limb rehabilitation training device based on electro-oculogram signal controlDownload PDFInfo
- Publication number
- CN103182159A CN103182159ACN2012103150266ACN201210315026ACN103182159ACN 103182159 ACN103182159 ACN 103182159ACN 2012103150266 ACN2012103150266 ACN 2012103150266ACN 201210315026 ACN201210315026 ACN 201210315026ACN 103182159 ACN103182159 ACN 103182159A
- Authority
- CN
- China
- Prior art keywords
- electro
- lower limb
- rehabilitation training
- training device
- limb rehabilitation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012549trainingMethods0.000titleclaimsabstractdescription46
- 210000003141lower extremityAnatomy0.000titleclaimsabstractdescription31
- 238000012545processingMethods0.000claimsdescription8
- 230000033001locomotionEffects0.000abstractdescription28
- 238000000034methodMethods0.000abstractdescription7
- 238000002955isolationMethods0.000abstractdescription6
- 230000000694effectsEffects0.000abstractdescription5
- 210000005252bulbus oculiAnatomy0.000description11
- 230000009471actionEffects0.000description7
- 230000007423decreaseEffects0.000description7
- 210000001508eyeAnatomy0.000description7
- 230000000875corresponding effectEffects0.000description5
- 238000002474experimental methodMethods0.000description5
- 238000011282treatmentMethods0.000description4
- 238000007405data analysisMethods0.000description3
- 230000008569processEffects0.000description3
- 238000004458analytical methodMethods0.000description2
- 238000006243chemical reactionMethods0.000description2
- 238000013016dampingMethods0.000description2
- 238000010586diagramMethods0.000description2
- 230000000193eyeblinkEffects0.000description2
- 238000010606normalizationMethods0.000description2
- 230000003252repetitive effectEffects0.000description2
- 208000014825Abnormal muscle toneDiseases0.000description1
- 206010017585Gait spasticDiseases0.000description1
- 206010019468HemiplegiaDiseases0.000description1
- 208000011644Neurologic Gait diseaseDiseases0.000description1
- 238000013459approachMethods0.000description1
- 230000037396body weightEffects0.000description1
- 210000004556brainAnatomy0.000description1
- 210000003710cerebral cortexAnatomy0.000description1
- 230000003247decreasing effectEffects0.000description1
- 230000007547defectEffects0.000description1
- 238000013461designMethods0.000description1
- 230000008034disappearanceEffects0.000description1
- 239000003814drugSubstances0.000description1
- 210000003414extremityAnatomy0.000description1
- 230000005021gaitEffects0.000description1
- 230000005484gravityEffects0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 210000003205muscleAnatomy0.000description1
- 238000013021overheatingMethods0.000description1
- 238000011160researchMethods0.000description1
- 238000005070samplingMethods0.000description1
- 230000004083survival effectEffects0.000description1
- 238000012546transferMethods0.000description1
- 230000003313weakening effectEffects0.000description1
- 208000016261weight lossDiseases0.000description1
- 230000004580weight lossEffects0.000description1
Images



Landscapes
- Rehabilitation Tools (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及一种智能控制的下肢康复训练装置,特别涉及一种基于眼波信号控制的下肢康复训练装置,属于康复医疗器械领域。The invention relates to an intelligently controlled lower limb rehabilitation training device, in particular to a lower limb rehabilitation training device controlled based on eye wave signals, which belongs to the field of rehabilitation medical equipment.
背景技术Background technique
根据2006年第二次全国残疾人抽样调查主要数据公报显示,目前,全国各类残疾人的总数为8296万人,占全国总人口的比例为6.34%;其中肢体残疾2412万人,占残疾人总数的29.07%;全国有残疾人的家庭户共7050万户,占全国家庭户总户数的17.80%;其中有2个以上残疾人的家庭户876万户,占残疾人家庭户的12.43%;有残疾人的家庭户的总人口占全国总人口的19.98%。而在这些残疾人中,多数人是可以通过康复治疗、配备康复器具和康复训练,改善甚至部分或完全恢复其丧失的功能的。According to the bulletin on the main data of the second national sampling survey on disabled persons in 2006, the total number of disabled persons in the country is 82.96 million, accounting for 6.34% of the total population of the country; 29.07% of the total; there are 70.5 million households with disabilities nationwide, accounting for 17.80% of the total number of households nationwide; 8.76 million households have more than two disabled persons, accounting for 12.43% of households with disabilities ; The total population of households with disabilities accounts for 19.98% of the total population of the country. Among these disabled people, most of them can improve or even partially or completely recover their lost functions through rehabilitation treatment, rehabilitation equipment and rehabilitation training.
下肢的主要功能是支撑体重和行走,而站立行走是人类生存的基本需要,也是人们生活自理的必要条件,往往也是患者在康复治疗过程中最基本需求。下肢偏瘫患者由于肢体肌群间协调功能减弱或消失,肌张力异常而出现偏瘫步态或丧失行走功能,严重影响了患者的生活自理能力,增加了社会和家庭的负担。由于大脑的可塑性,医学上通常是通过进行重复的、特定任务的训练让患者进行足够的重复性活动,从而使重组中的大脑皮质通过深刻的体验来学习和储存正确的运动模式。基于这种方法,在过去20年里,减重活动平板步行训练的治疗方法已被引入到用于残障人士的康复治疗中,并取得了显著的临床效果。然而,传统的减重活动平板步行训练的治疗方法需要很多的物理治疗师来辅助病人侧身和重心转移,从而使得治疗师必须花费很多的体力而导致其疲劳或过重身体压力,这也使得对残障者的治疗次数以及重复次数受到严重的限制。因此,需要研发自动的康复装置代替物理治疗师的手动辅助。The main function of the lower limbs is to support body weight and walk. Standing and walking are the basic needs of human survival and the necessary conditions for people to take care of themselves. They are often the most basic needs of patients in the process of rehabilitation. Patients with hemiplegia of lower extremities suffer from hemiplegic gait or loss of walking function due to the weakening or disappearance of coordination between limb muscle groups and abnormal muscle tone, which seriously affects the self-care ability of patients and increases the burden on society and family. Due to the plasticity of the brain, in medicine, repetitive, task-specific training is usually used to allow patients to perform enough repetitive activities, so that the reorganizing cerebral cortex can learn and store the correct movement patterns through profound experience. Based on this approach, the treatment of weight-loss activity treadmill walking training has been introduced for the rehabilitation of disabled people in the past 20 years, and has achieved remarkable clinical results. However, the traditional weight-reducing activity plank walking training treatment method requires a lot of physical therapists to assist the patient's sideways and center of gravity transfer, so that the therapist must spend a lot of physical strength and cause fatigue or excessive physical pressure, which also makes the patient The number of treatments and repetitions for the handicapped is severely limited. Therefore, there is a need to develop automated rehabilitation devices to replace manual assistance from physical therapists.
目前多数研究机构开发的自动下肢康复器械,如步态训练器,主要以被动运动模式为主,缺乏目标导向训练设计,往往将患者本人的主观意愿排除在外,使得康复训练缺少自主性,不能达到最佳的训练效果;并且目前研发的多数下肢康复器械只能引导患者进行类似踩踏自行车的圆周运动方式,这种圆周运动方式有别于人正常行走时的上、下垂直运动方式,不能很好的对残障者进行合理的康复训练。At present, the automatic lower limb rehabilitation equipment developed by most research institutions, such as gait trainers, is mainly based on passive movement mode, lacks goal-oriented training design, and often excludes the patient's own subjective wishes, making rehabilitation training lack of autonomy and unable to achieve The best training effect; and most of the lower limb rehabilitation equipment currently developed can only guide patients to perform circular motions similar to pedaling bicycles. This circular motion is different from the up and down vertical motions of people when they walk normally, and it is not very good. Reasonable rehabilitation training for the disabled.
发明内容Contents of the invention
本发明的目的是克服现有的下肢康复器械存在的缺陷和不足,提供一种利用眼电信号作为患者主观意愿信号,帮助下肢残障者进行腿部上、下垂直训练的一种基于眼电信号控制的下肢康复训练装置。The purpose of the present invention is to overcome the defects and insufficiencies of the existing lower limb rehabilitation equipment, and to provide a kind of oculograph based on electrooculogram signal as the patient's subjective will signal to help the lower limb disabled to perform leg up and down vertical training. Controlled lower limb rehabilitation training device.
为了达到上述目的,本发明的构思是:由眼电信号人机接口、直立床、康复踏步机械和控制驱动构成一种基于眼电信号控制的下肢康复训练装置。眼电信号人机接口包括放置在眼睛周围的Ag或Ag-Cl电极、眼电信号放大电路和ARM单片机,通过Ag或Ag-Cl电极检测到微弱的眼电信号,眼电信号放大电路对该信号进行放大处理,然后传送至带有A/D数模转换功能的ARM单片机,在单片机内对眼电信号进行去伪值,归一化处理后,将得到的有效特征值以特征值数据归类,单片机则做相应数据分析及后续运算,最终输出识别的动作模式信号至控制驱动,由控制驱动引导康复踏步机械完成对应动作。In order to achieve the above object, the concept of the present invention is: a lower limb rehabilitation training device based on electrooculogram signal control is formed by electrooculogram signal human-machine interface, upright bed, rehabilitation stepping machine and control drive. The human-machine interface of electrooculogram signals includes Ag or Ag-Cl electrodes placed around the eyes, electrooculogram signal amplifying circuits and ARM single-chip microcomputers. Weak electrooculogram signals are detected through Ag or Ag-Cl electrodes, and the electrooculogram signal amplifying circuits The signal is amplified, and then sent to the ARM single-chip microcomputer with A/D digital-to-analog conversion function. The single-chip microcomputer performs corresponding data analysis and subsequent calculations, and finally outputs the recognized action mode signal to the control drive, and the control drive guides the rehabilitation stepping machine to complete the corresponding action.
根据上述发明构思,本发明采用如下技术方案:According to above-mentioned inventive conception, the present invention adopts following technical scheme:
一种基于眼电信号控制的下肢康复训练装置,包括直立床和依次相连的眼电信号人机接口、控制驱动装置和康复踏步机械。所述的眼电信号人机接口包括依次相连的Ag或Ag-Cl电极,眼电信号放大电路、光电隔离电路和ARM单片机;所述的控制驱动装置包括驱动电路、位置传感器、力传感器、安全保护限位开关。所述的康复踏步机械包括两套独立的直流电机、螺旋副、磁流变阻尼器和脚踏板,分别用于控制左脚和右脚的踏步运动。所述的直立床包括床板支架、固定在床板支架上的限流控制器、床板和液压伸缩杆,所述的液压伸缩杆一端可转动的固定在限流控制器上,另一端可转动的固定在床板上,在限流控制器的作用下,可实现床板0-90°位置定位。A lower limb rehabilitation training device based on electro-oculogram signal control includes an upright bed, a man-machine interface connected in sequence with electro-oculogram signals, a control drive device and a rehabilitation stepping machine. The human-machine interface of the electrooculogram signal includes successively connected Ag or Ag-Cl electrodes, an electrooculogram signal amplifying circuit, a photoelectric isolation circuit and an ARM single-chip microcomputer; the described control driving device includes a driving circuit, a position sensor, a force sensor, a safety Protection limit switch. The rehabilitation stepping machine includes two sets of independent DC motors, a screw pair, a magneto-rheological damper and a pedal, which are respectively used to control the stepping motion of the left foot and the right foot. The upright bed includes a bed board support, a flow limiting controller fixed on the bed board support, a bed board and a hydraulic telescopic rod, one end of the hydraulic telescopic rod is rotatably fixed on the current limiting controller, and the other end is rotatably fixed On the bed board, under the action of the current limiting controller, the positioning of the bed board at 0-90° can be realized.
进一步,所述的Ag或Ag-Cl电极放置在眼睛周围用于采集眼波信号,眼电信号经眼电信号放大电路放大后,传送至ARM单片机,在单片机内做进行去伪值,归一化处理后,将得到的有效特征值以特征值数据归类,单片机则做相应数据分析及后续运算,输出识别的动作模式信号。所述的光电隔离电路设置在眼电信号放大电路之后,用于保障使用者的人身安全。Further, the Ag or Ag-Cl electrodes are placed around the eyes to collect eye wave signals, and the electro-oculogram signals are amplified by the electro-oculogram signal amplifying circuit, and then sent to the ARM single-chip microcomputer for de-false value and normalization in the single-chip microcomputer. After processing, the obtained effective eigenvalues are classified as eigenvalue data, and the single-chip microcomputer performs corresponding data analysis and subsequent operations, and outputs the recognized action mode signal. The photoelectric isolation circuit is arranged behind the oculoelectric signal amplifying circuit to ensure the personal safety of the user.
进一步,所述的ARM单片机通过驱动电路分别与磁流变阻尼器和直流电机相连,磁流变阻尼器或直流电机通过ARM单片机输出的识别动作模式信号控制脚踏板垂直运动幅度。Further, the ARM single-chip microcomputer is respectively connected with the magneto-rheological damper and the DC motor through the drive circuit, and the magneto-rheological damper or the DC motor controls the vertical motion range of the pedal through the identification action mode signal output by the ARM single-chip microcomputer.
进一步,所述的脚踏板通过数据线分别与位置传感器和力传感器相连,位置传感器和力传感器通过传感器信号处理电路与ARM单片机相连,所述的ARM单片机通过蓝牙、RF射频或RS232接口与PC机或者手机设备相连。患者康复训练时的主观控制状态和训练程度可以通过位置传感器和力传感器传送到PC机上,供相关医生做分析。Further, the pedals are respectively connected to the position sensor and the force sensor through the data line, the position sensor and the force sensor are connected to the ARM single-chip microcomputer through the sensor signal processing circuit, and the described ARM single-chip microcomputer is connected to the PC through the bluetooth, RF radio frequency or RS232 interface machine or mobile device. The subjective control state and training level of patients during rehabilitation training can be transmitted to the PC through position sensors and force sensors for analysis by relevant doctors.
进一步,所述的ARM单片机通过数据线与控制操作面板相连,通过控制操作面板可以人工干预康复训练工作参数。Further, the ARM single-chip microcomputer is connected with the control operation panel through the data line, and the rehabilitation training working parameters can be manually intervened through the control operation panel.
进一步,所述的床板两边设置有左、右手把,在左、右手把上固定有绑带,通过绑带将患者固定在床板上,所述的左手把上设置有床板角度控制操作面板,患者可以根据需要随时变动直立床角度。Further, left and right hand handles are provided on both sides of the bed board, straps are fixed on the left and right hand handles, and the patient is fixed on the bed board through the straps, and a bed board angle control operation panel is provided on the left hand handle, and the patient The upright bed angle can be changed at any time as needed.
本发明与现有技术相比较,具有如下显而易见的突出实质性特点和显著优点:Compared with the prior art, the present invention has the following obvious outstanding substantive features and significant advantages:
本发明将眼电信号与下肢康复训练装置相结合,患者在使用上述设备后,可以通过眼电信号自主控制下肢康复训练装置,使患者可以达到随时随地训练的效果,患者仅需自己就能完成全部的下肢康复训练;本发明采用的眼电信号采集装置不仅对患者侵入程度低,而且信号动态明显,受干扰小,能更准确的传达患者的主观意愿到相应的下肢康复器械上;本发明所述的康复踏步机械采用垂直上下运动的左右踏板,运动轨迹更加接近人体日常生活状态,对病人来说更加简单实用。The present invention combines the electrooculogram signal with the lower limb rehabilitation training device. After using the above equipment, the patient can independently control the lower limb rehabilitation training device through the electrooculogram signal, so that the patient can achieve the effect of training anytime and anywhere, and the patient only needs to complete it by himself. All lower limb rehabilitation training; the oculoelectric signal acquisition device adopted in the present invention not only has a low degree of intrusion to the patient, but also has obvious signal dynamics, less interference, and can more accurately convey the patient's subjective wishes to the corresponding lower limb rehabilitation equipment; the present invention The rehabilitation stepping machine adopts the left and right pedals that move vertically up and down, and the motion track is closer to the daily life state of the human body, which is simpler and more practical for the patient.
附图说明Description of drawings
图1是本发明的整体结构框架图;Fig. 1 is an overall structural frame diagram of the present invention;
图2是本发明直立床的结构示意图;Fig. 2 is the structural representation of upright bed of the present invention;
图3是本发明康复踏步机械结构示意图;Fig. 3 is the mechanical structural representation of rehabilitation stepping of the present invention;
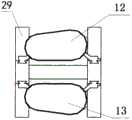
图4是本发明康复踏步机械俯视结构图;Fig. 4 is a top view structural diagram of the rehabilitation stepping machine of the present invention;
图中:1,Ag或Ag-Cl电极;2,眼电信号放大电路;3,光电隔离电路;4,ARM单片机;5,控制操作面板;6,左驱动电路;7,右驱动电路;8,左磁流变阻尼器;9,左直流电机;10,右直流电机;11,右磁流变阻尼器;12,左脚踏板;13,右脚踏板;14,左力传感器;15,左位置传感器;16,左安全保护限位开关;17,左传感器信号处理电路;18,右力传感器;19,右位置传感器;20,右安全保护限位开关;21,右传感器信号处理电路;22,床板;23,手把;24,床板角度指示器;25,液压伸缩杆;26,限流控制器;27,床板支架;28,床板角度控制操作面板;29,踏板支撑架;30,右位置传感器;31,螺旋副;32,电动机;33,右力传感器。In the figure: 1, Ag or Ag-Cl electrode; 2, oculoelectric signal amplifying circuit; 3, photoelectric isolation circuit; 4, ARM single-chip microcomputer; 5, control operation panel; 6, left drive circuit; 7, right drive circuit; 8 , left magnetorheological damper; 9, left DC motor; 10, right DC motor; 11, right magnetorheological damper; 12, left pedal; 13, right pedal; 14, left force sensor; 15 , left position sensor; 16, left safety protection limit switch; 17, left sensor signal processing circuit; 18, right force sensor; 19, right position sensor; 20, right safety protection limit switch; 21, right sensor signal processing circuit ;22, bed board; 23, handle; 24, bed board angle indicator; 25, hydraulic telescopic rod; 26, current limiting controller; 27, bed board support; 28, bed board angle control operation panel; 29, pedal support frame; 30 , the right position sensor; 31, the screw pair; 32, the motor; 33, the right force sensor.
具体实施方法Specific implementation method
下面结合实施例及附图对本发明所述的一种基于眼电信号控制的下肢康复训练装置进行详细说明。A lower limb rehabilitation training device based on electrooculogram signal control according to the present invention will be described in detail below with reference to the embodiments and the accompanying drawings.
如图1、图2、图3和图4所示,本发明的一种基于眼电信号控制的下肢康复训练装置,包括直立床、眼电信号人机接口、控制驱动装置和康复踏步机械。所述的眼电信号人机接口包括依次相连的Ag或Ag-Cl电极1,眼电信号放大电路2、光电隔离电路3和ARM单片机4;所述的ARM单片机4通过左驱动电路6与左磁流变阻尼器8和左直流电机9相连,所述的ARM单片机4通过右驱动电路7与右磁流变阻尼器11和右直流电机10相连;所述的左磁流变阻尼器8和左直流电机9直接控制左脚踏板12的踏板运动,右磁流变阻尼器11和右直流电机10直接控制右脚踏板13的踏板运动;所述的左脚踏板12和右脚踏板13通过数据线分别与左位置传感器15、左力传感器14和右位置传感器19、右力传感器18相连,左位置传感器15、左力传感器14通过左传感器信号处理电路17与ARM单片机4相连,右位置传感器19、右力传感器18通过右传感器信号处理电路21与ARM单片机4相连;所述的左脚踏板12通过数据线连接有左安全保护限位开关16,所述的右脚踏板13通过数据线连接有右安全保护限位开关20,左、右安全保护限位开关实现对康复踏步机械的限流保护和过热保护。As shown in Fig. 1, Fig. 2, Fig. 3 and Fig. 4, a lower limb rehabilitation training device based on electrooculogram signal control of the present invention includes an upright bed, an electrooculogram signal man-machine interface, a control drive device and a rehabilitation stepping machine. Described human-machine interface of electrooculogram signal comprises Ag or Ag-Cl electrode 1 connected successively, electrooculogram signal amplifying circuit 2, photoelectric isolation circuit 3 and ARM single-chip microcomputer 4; The magnetorheological damper 8 is connected with the left DC motor 9, and the ARM single-chip microcomputer 4 is connected with the right
所述的ARM单片机4通过蓝牙、RF射频或RS232接口与PC机或者手持设备相连。康复训练的工作参数可以在PC机或者手机设备上设定,然后传送到本康复装置内的控制中心ARM单片机4上。ARM单片机4随后根据此参数安排康复训练。康复训练时的主观控制状态、运动状态、训练程度等参数也可以发送到PC机上,供相关医生做分析。所述的ARM单片机4通过数据线与控制操作面板5相连,通过控制操作面板5可以随时人工干预康复训练工作程序。The ARM single-chip microcomputer 4 is connected with a PC or a handheld device through a bluetooth, RF radio frequency or RS232 interface. The working parameters of the rehabilitation training can be set on the PC or the mobile phone device, and then sent to the ARM single-chip microcomputer 4 of the control center in the rehabilitation device. ARM single-chip microcomputer 4 arranges rehabilitation training according to this parameter subsequently. Parameters such as subjective control state, exercise state, and training level during rehabilitation training can also be sent to the PC for analysis by relevant doctors. The ARM single-chip microcomputer 4 is connected with the control operation panel 5 through the data line, and the rehabilitation training work program can be manually intervened at any time through the control operation panel 5 .
所述的直立床包括床板支架27、固定在床板支架27上的限流控制器26、床板22和液压伸缩杆25,所述的液压伸缩杆25一端可转动的固定在限流控制器26上,另一端可转动的固定在床板22背后,床板22两边设置有左、右手把23,在左、右手把23上固定有绑带(图中未表示),通过绑带将患者固定在床板22上,所述的手把23上设置有床板角度控制操作面板28,床板角度控制操作面板28通过数据线与限流控制器26相连,患者可以通过调节床板角度控制操作面板28实现床板0-90°位置定位。The upright bed includes a
本发明的眼电信号控制参数为:眼球向上运动,踏板助力增加一档;眼球向下运动,踏板助力减小一档,当助力减小到零后,会自动增加阻尼力;眼球向左运动,踏板上下运动频率增加一档;眼球向右运动,踏板上下运动频率减少一档;眼球转动一下,踏板启动,眼球再转动一下,踏板停止;眼睛快速眨眼(每秒2次以上),踏板运动幅度增大(踏板单次运动高度增大);眼睛慢速眨眼(每秒1次以下),踏板运动幅度减少(踏板单次运动高度降低)。The control parameters of the electrooculogram signal in the present invention are: when the eyeball moves upward, the pedal assist increases by one level; when the eyeball moves downward, the pedal assist decreases by one level, and when the assist force decreases to zero, the damping force is automatically increased; when the eyeball moves to the left , the frequency of the pedal up and down movement increases by one gear; the eyeball moves to the right, the frequency of the pedal’s up and down movement decreases by one gear; the eyeball rotates once, the pedal starts, the eyeball rotates again, the pedal stops; the eyes blink quickly (more than 2 times per second), the pedal moves The amplitude increases (the height of a single pedal movement increases); the eyes blink slowly (less than 1 time per second), and the pedal movement amplitude decreases (the height of a single pedal movement decreases).
具体实施时,通过他人协助绑带将患者固定在床板22上,避免患者在做康复训练时意外摔倒,然后通过调节床板角度控制操作面板28使床板22固定在垂直位置;患者佩戴好接收眼电信号的Ag或Ag-Cl电极1,眼电信号通过上述装置的眼电信号放大电路2、光电隔离电路3,将眼电信号放大后传送入带有A/D数模转换功能的ARM单片机4,在ARM单片机4内对眼电信号进行去伪值,归一化处理后,将得到的有效特征值以特征值数据归类,单片机4则做相应数据分析及后续运算,最终输出识别的动作模式信号,动作模式信号通过驱动电路调节磁流变阻尼器和直流电机,磁流变阻尼器和直流电机实现对脚踏板的踏步运动,本发明采用垂直上下运动的左右踏板,运动轨迹更加接近人体日常生活状态,对病人来说更加简单实用。During specific implementation, the patient is fixed on the
为了验证本发明所述装备的可行性和稳定性,我们对5名受试者进行操作实验,受试者均为成年下肢残障者(平均年龄56.8岁),实验包括4个阶段,每个阶段连续进行50次踏步运动,受试者均未经过先期训练过程,选择任务的顺序在实验中随机给出。残障者从发出眼电信号任务命令开始计时,到踏步运动真正实施,踏步运动结束,则计时停止,依次进行50次。如果眼球转动后,踏步运动未被实施,则记为一个动作错误;如果眼球向上运动后,踏板助力未增加,则记为一个助力错误;如果眼球向下运动后,踏板助力未减小,则记为一个阻力错误;如果眼球向左运动后,踏板上下运动频率未增加一档,则记为一个增频错误;如果眼球向右运动后,踏板上下运动频率未减少一档,则记为一个减频错误;如果眼睛快速眨眼(每秒2次以上),踏板运动幅度未增加,则记为一个增幅错误;如果眼睛慢速眨眼(每秒1次以下),踏板运动幅度未降低,则记为一个减幅错误。实验时间记录严格在相同实验条件下由同一个实验者负责进行。In order to verify the feasibility and stability of the equipment described in the present invention, we conducted an operation experiment on 5 subjects, all of whom were adults with lower limb disabilities (average age 56.8 years old). The experiment included 4 stages, each stage Continuously performed 50 stepping exercises, none of the subjects had undergone the pre-training process, and the order of selecting tasks was randomly given in the experiment. The handicapped person started timing from sending out the oculoelectric signal task command, until the stepping movement was actually implemented, and the timing stopped when the stepping movement was over, and it was performed 50 times in sequence. If the stepping movement is not performed after the eyeball is turned, it is recorded as an action error; if the pedal assistance is not increased after the eyeball is moved upward, it is recorded as an assistance error; if the pedal assistance is not decreased after the eyeball is moved downward, then Record it as a resistance error; if the frequency of the pedal up and down movement does not increase by one step after the eyeball moves to the left, it is recorded as an increase frequency error; if the eyeball moves to the right, and the frequency of the pedal up and down movement does not decrease by one step, it is recorded as a Decrease frequency error; if the eye blinks quickly (more than 2 times per second) and the pedal movement range does not increase, it is recorded as an increase error; if the eye blinks slowly (less than 1 time per second) and the pedal movement range is not reduced, it is recorded for a damping error. The experimental time records were strictly carried out by the same experimenter under the same experimental conditions.
表1至表5显示了5名残障者在4个阶段连续50次踏步运动中的错误选择次数。Tables 1 to 5 show the number of wrong choices made by 5 disabled persons in 50 consecutive stepping movements in 4 stages.
表1残障者1受试实验数据Table 1 Experimental data of disabled person 1

表2残障者2受试实验数据Table 2 Experimental data of disabled person 2

表3残障者3受试实验数据Table 3 Handicapped 3 subject experimental data

表4残障者4受试实验数据Table 4 Handicapped 4 subjects experimental data

表5残障者5受试实验数据Table 5 Handicapped 5 subject experimental data

从上述实验数据可以看出,每个残障者在连续的实验过程中,错误次数明显减少,从第二阶段开始动作错误、助力错误、阻力错误、增频错误和减频错误、增幅错误、减幅错误均下降到15%以下,从第四阶段开始各类错误均下降到5%以下。上述实验表明残障者在经过第一阶段的锻炼之后,熟悉并适应了系统的控制操作,更证明了本发明装置具有较好的可行性和稳定性。From the above experimental data, it can be seen that the number of mistakes of each disabled person in the continuous experiment process is significantly reduced. From the second stage, movement errors, assist errors, resistance errors, frequency increase errors and From the fourth stage, all kinds of errors have dropped to less than 5%. The above experiments show that the disabled are familiar with and adapted to the control operation of the system after the first stage of exercise, which further proves that the device of the present invention has better feasibility and stability.
综上所述仅为本发明的较佳实施例,凡依照本发明申请专利范围的内容所做的等效变化及修饰,皆应属于本发明保护的技术范畴。To sum up, the above are only preferred embodiments of the present invention, and all equivalent changes and modifications made according to the scope of the patent application of the present invention shall belong to the technical scope of protection of the present invention.
Claims (9)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2012103150266ACN103182159A (en) | 2012-08-30 | 2012-08-30 | Lower limb rehabilitation training device based on electro-oculogram signal control |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2012103150266ACN103182159A (en) | 2012-08-30 | 2012-08-30 | Lower limb rehabilitation training device based on electro-oculogram signal control |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103182159Atrue CN103182159A (en) | 2013-07-03 |
Family
ID=48673766
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2012103150266APendingCN103182159A (en) | 2012-08-30 | 2012-08-30 | Lower limb rehabilitation training device based on electro-oculogram signal control |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN103182159A (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105561473A (en)* | 2015-12-21 | 2016-05-11 | 林栋� | Autism acupoint stimulation therapeutic instrument based on biofeedback technology |
| CN105607571A (en)* | 2016-01-23 | 2016-05-25 | 上海健医实业有限公司 | Rehabilitation weight-reduction equipment intelligent controller |
| CN107537135A (en)* | 2017-01-25 | 2018-01-05 | 上海电气集团股份有限公司 | A kind of lower limb rehabilitation training device and system based on virtual reality technology |
| CN108095918A (en)* | 2018-01-29 | 2018-06-01 | 北京理工大学 | Rehabilitation training robot |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004254876A (en)* | 2003-02-25 | 2004-09-16 | Japan Science & Technology Agency | Motor function assisting device and method |
| CN2788795Y (en)* | 2005-05-11 | 2006-06-21 | 哈尔滨工程大学 | Intelligent exercising device for leg rehabilitation |
| CN101061984A (en)* | 2006-04-29 | 2007-10-31 | 香港理工大学 | Rehabilitation robot system and training method using electromyographic signals to provide mechanical assistance |
| CN101584636A (en)* | 2009-07-03 | 2009-11-25 | 东南大学 | Double-output shaft active passive upper and lower limbs rehabilitation training mechanism |
| CN101599127A (en)* | 2009-06-26 | 2009-12-09 | 安徽大学 | Feature Extraction and Recognition Method of Electro-oculogram Signal |
| CN202236150U (en)* | 2011-09-23 | 2012-05-30 | 安阳市翔宇医疗设备有限责任公司 | Intelligent lower limb feedback rehabilitation training device |
- 2012
- 2012-08-30CNCN2012103150266Apatent/CN103182159A/enactivePending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004254876A (en)* | 2003-02-25 | 2004-09-16 | Japan Science & Technology Agency | Motor function assisting device and method |
| CN2788795Y (en)* | 2005-05-11 | 2006-06-21 | 哈尔滨工程大学 | Intelligent exercising device for leg rehabilitation |
| CN101061984A (en)* | 2006-04-29 | 2007-10-31 | 香港理工大学 | Rehabilitation robot system and training method using electromyographic signals to provide mechanical assistance |
| CN101599127A (en)* | 2009-06-26 | 2009-12-09 | 安徽大学 | Feature Extraction and Recognition Method of Electro-oculogram Signal |
| CN101584636A (en)* | 2009-07-03 | 2009-11-25 | 东南大学 | Double-output shaft active passive upper and lower limbs rehabilitation training mechanism |
| CN202236150U (en)* | 2011-09-23 | 2012-05-30 | 安阳市翔宇医疗设备有限责任公司 | Intelligent lower limb feedback rehabilitation training device |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105561473A (en)* | 2015-12-21 | 2016-05-11 | 林栋� | Autism acupoint stimulation therapeutic instrument based on biofeedback technology |
| CN105561473B (en)* | 2015-12-21 | 2018-02-02 | 林栋� | A kind of self-closing disease acupoint stimulation therapeutic equipment based on biofeedback technology |
| CN105607571A (en)* | 2016-01-23 | 2016-05-25 | 上海健医实业有限公司 | Rehabilitation weight-reduction equipment intelligent controller |
| CN107537135A (en)* | 2017-01-25 | 2018-01-05 | 上海电气集团股份有限公司 | A kind of lower limb rehabilitation training device and system based on virtual reality technology |
| CN108095918A (en)* | 2018-01-29 | 2018-06-01 | 北京理工大学 | Rehabilitation training robot |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101221046B1 (en) | Intellectual exoskeleton robot system for assisting daily life and rehabilitation training | |
| CN102813998B (en) | Multifunctional composite rehabilitation system for patient suffering from central nerve injury | |
| US8359123B2 (en) | Robotic system and training method for rehabilitation using EMG signals to provide mechanical help | |
| WO2019116093A1 (en) | Apparatus and system for limb rehabitation | |
| CN103519966B (en) | Portable hemiplegy rehabilitation training robot for hemiplegic upper limb | |
| CN109009875A (en) | Personalized upper-limbs rehabilitation training robot | |
| CN104688486A (en) | Lower limbs rehabilitation robot motion control system | |
| CN104983543A (en) | An intelligent lower limb rehabilitation training device | |
| CN104840332A (en) | Patient recovery device for neurology department | |
| CN109276407B (en) | Elbow joint training adapter and rehabilitation training device | |
| CN208626529U (en) | Preceding shoulder joint training adapter and forearm recovery training equipment | |
| CN203576847U (en) | Portable robot for upper limb hemiplegia rehabilitation training | |
| CN107822834A (en) | A kind of pedal lower limb rehabilitation robot of bilateral independent control | |
| CN104983549A (en) | An intelligent upper limb rehabilitation training device | |
| CN107929939A (en) | The upper-limbs rehabilitation training robot and its application method of a kind of nerve electric stimulation | |
| CN110613583A (en) | General-promotion type hemiplegic ankle joint movement function rehabilitation training device and training method | |
| CN103182159A (en) | Lower limb rehabilitation training device based on electro-oculogram signal control | |
| CN106074076A (en) | The medical rehabilitation robot system of multi-modal perceptible feedback | |
| CN210845162U (en) | A trunk muscle activation rehabilitation training device | |
| US20240096483A1 (en) | ADAPTIVE CONTROL METHOD AND SYSTEM FOR UPPER LIMB REHABILITATION ROBOT BASED ON GAME THEORY AND SURFACE ELECTROMYOGRAPHY (sEMG) | |
| CN216536718U (en) | A multifunctional active and passive rehabilitation training device | |
| CN204814707U (en) | Intelligent upper limbs rehabilitation training device | |
| CN212490661U (en) | Intelligent medical robot for lower limb rehabilitation | |
| CN111166617B (en) | Upper limb movement rehabilitation system | |
| CN204863872U (en) | Intelligent low limbs rehabilitation training device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C41 | Transfer of patent application or patent right or utility model | ||
| CB03 | Change of inventor or designer information | Inventor after:Hu Lianggang Inventor after:Hu Qiyi Inventor before:Hu Qiyi | |
| COR | Change of bibliographic data | ||
| TA01 | Transfer of patent application right | Effective date of registration:20160621 Address after:325006 Zhejiang, Ouhai, South East Road, No. 38, Wenzhou National University Science Park Incubator Applicant after:Wenzhou Medical University Address before:325000 Zhejiang city of Wenzhou Province River Street Lucheng District letter Guangxin block A room 603 Building 1 buildings Applicant before:Hu Qiyi | |
| RJ01 | Rejection of invention patent application after publication | Application publication date:20130703 | |
| RJ01 | Rejection of invention patent application after publication |