CN102868875A - Multidirectional early-warning positioning and automatic tracking and monitoring device for monitoring area - Google Patents
Multidirectional early-warning positioning and automatic tracking and monitoring device for monitoring areaDownload PDFInfo
- Publication number
- CN102868875A CN102868875ACN2012103577401ACN201210357740ACN102868875ACN 102868875 ACN102868875 ACN 102868875ACN 2012103577401 ACN2012103577401 ACN 2012103577401ACN 201210357740 ACN201210357740 ACN 201210357740ACN 102868875 ACN102868875 ACN 102868875A
- Authority
- CN
- China
- Prior art keywords
- video
- unit
- warning
- early warning
- tracking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


















Landscapes
- Studio Devices (AREA)
- Closed-Circuit Television Systems (AREA)
Abstract
Translated fromChineseDescription
Translated fromChinese技术领域technical field
本发明涉及视频监控技术领域,特别涉及一种多方向监控区域预警定位自动跟踪监控装置。The invention relates to the technical field of video monitoring, in particular to a multi-directional monitoring area early warning positioning automatic tracking monitoring device.
背景技术Background technique
目前,在视频监控技术领域,现有的视频监控系统通常包括视频监控前端设备、传输设备、主控设备和显示设备等设备。其中视频监控前端设备主要负责数据和视频信号的采集处理;传输设备将上述采集的数据和视频信号传输至主控设备和显示设备;主控设备对数据进行分析和处理后产生或直接由主控单元发出控制指令,并由传输设备传输至视频监控前端设备,显示设备对视频信号进行处理后显示在显示单元上。At present, in the field of video surveillance technology, the existing video surveillance system usually includes video surveillance front-end equipment, transmission equipment, main control equipment, display equipment and other equipment. Among them, the video monitoring front-end equipment is mainly responsible for the collection and processing of data and video signals; the transmission equipment transmits the above-mentioned collected data and video signals to the main control equipment and display equipment; The unit issues control instructions, which are transmitted by the transmission equipment to the video surveillance front-end equipment, and the display equipment processes the video signal and displays it on the display unit.
目前,视频监控系统的视频监控前端设备主要分为以下三类:At present, the video surveillance front-end equipment of the video surveillance system is mainly divided into the following three categories:
第一类是定点视频采集装置,即采用定点摄像机作为视频监控前端设备,用来监控指定区域,该类视频监控前端设备只能对固定方向进行监控,存在监控盲区。The first type is a fixed-point video acquisition device, that is, a fixed-point camera is used as a video surveillance front-end device to monitor a designated area. This type of video surveillance front-end device can only monitor a fixed direction, and there are monitoring blind spots.
第二类是旋转视频采集装置,即采用可在水平方向和垂直方向上旋转的装置带动摄像机进行多方向监控,如云台装置与摄像机的组合(下文简称“云台摄像机”)作为视频监控前端设备,该类视频监控前端设备虽解决了监控方向不可调的问题,但同一时刻不能监控多个方向,因此仍然存在监控盲区。The second type is a rotating video acquisition device, which uses a device that can rotate in the horizontal and vertical directions to drive the camera for multi-directional monitoring, such as the combination of a pan-tilt device and a camera (hereinafter referred to as "pan-tilt camera") as a video surveillance front end Although this type of video surveillance front-end equipment solves the problem that the monitoring direction cannot be adjusted, it cannot monitor multiple directions at the same time, so there are still monitoring blind spots.
第三类是采用定点视频采集装置与旋转视频采集装置配合,如专利申请公布号CN102342099A提出的智能监控装置及采用该装置的影像监控系统,其主要采用例如广角摄像机(广角镜头与模拟摄像机/数字摄像机的组合)对监控区域进行广域视频采集,并采用例如云台摄像机对广域视频中的某个监控区域进行局部集中视频采集,上述视频监控前端设备常用于对运动目标的跟踪监控,但上述监控装置通过安装例如鱼眼镜头的广角摄像机采集的视频图像存在扭曲、畸变的现象,导致视频图像边缘位置的运动目标很难被识别,因此限制了监控范围。The third category is to adopt the fixed-point video acquisition device to cooperate with the rotating video acquisition device, such as the intelligent monitoring device proposed by the patent application publication number CN102342099A and the image monitoring system using the device, which mainly adopts such as wide-angle camera (wide-angle lens and analog camera/digital camera) Combination) to carry out wide-area video collection on the monitoring area, and use such as PTZ camera to carry out partial centralized video collection on a certain monitoring area in the wide-area video. The video image collected by the monitoring device by installing a wide-angle camera such as a fisheye lens is distorted and distorted, which makes it difficult to identify moving targets at the edge of the video image, thus limiting the monitoring range.
而且由于上述监控装置广域视频采集设备固定不可调,因此广域视频采集的监控区域在方向上不能改变,影响了上述监控装置的适应性和灵活性。Moreover, since the wide-area video acquisition equipment of the above-mentioned monitoring device is fixed and cannot be adjusted, the monitoring area of the wide-area video acquisition cannot be changed in direction, which affects the adaptability and flexibility of the above-mentioned monitoring device.
同时由于上述监控装置未采用辅助照明设备,使其无法在夜间或低照度情况下对监控区域内的运动目标进行定位跟踪。At the same time, because the above-mentioned monitoring device does not adopt auxiliary lighting equipment, it cannot locate and track moving targets in the monitoring area at night or under low-light conditions.
另外,以上三类视频监控前端设备均无法对运动目标进行示警。In addition, none of the above three types of video surveillance front-end equipment can warn moving targets.
发明内容Contents of the invention
本发明是为解决上述问题而提出的,其目的在于,提供一种多方向监控区域预警定位自动跟踪监控装置,该监控装置即使在低照度情况下仍能监控范围较大的全景区域,本监控装置通过对多个方向进行预警视频采集,直接检测多个预警视频图像内的动态,从而确定运动目标的位置信息,进而对运动目标进行跟踪视频采集、音频采集、光照示警和声音示警,同时,还在相应视频图像中添加报警信号,并通过回传指令控制主控设备产生报警动作,最终将多个预警视频和跟踪视频进行存储并传输至视频监控系统的显示设备。The present invention is proposed to solve the above problems, and its purpose is to provide a multi-directional monitoring area early warning positioning automatic tracking monitoring device, the monitoring device can still monitor a large panoramic area even under low illumination conditions, the monitoring The device collects early warning videos from multiple directions, directly detects the dynamics in multiple early warning video images, thereby determining the position information of the moving target, and then performs tracking video collection, audio collection, light warning and sound warning on the moving target. At the same time, An alarm signal is also added to the corresponding video image, and the main control device is controlled to generate an alarm action through the return command, and finally multiple warning videos and tracking videos are stored and transmitted to the display device of the video surveillance system.
其目的还在于,使本发明预警定位自动跟踪监控装置具有多方向监控区域调节功能,有效扩大视频监控区域,弥补现有广角摄像机所采集的视频图像周边扭曲、畸变的缺陷;相应优化配套的机械结构设计以实现多方向监控区域的可调性,进一步提高其适用性和灵活性。Its purpose is also to make the early warning and positioning automatic tracking monitoring device of the present invention have a multi-directional monitoring area adjustment function, effectively expand the video monitoring area, and make up for the defects of distortion and distortion around the video image collected by the existing wide-angle camera; The structure is designed to realize the adjustability of the multi-directional monitoring area, further improving its applicability and flexibility.
为实现上述目的本发明所采用的技术方案是:一种多方向监控区域预警定位自动跟踪监控装置,为视频监控系统的视频监控前端设备;该监控装置包括预警定位机构和跟踪示警机构;所述预警定位机构与该监控装置设有的支架连接,所述跟踪示警机构对应设置于预警定位机构上方;In order to achieve the above object, the technical solution adopted by the present invention is: a multi-directional monitoring area early warning positioning automatic tracking monitoring device, which is the video monitoring front-end equipment of the video monitoring system; the monitoring device includes an early warning positioning mechanism and a tracking warning mechanism; The early warning positioning mechanism is connected to the bracket provided on the monitoring device, and the tracking and warning mechanism is correspondingly arranged above the early warning positioning mechanism;
所述预警定位机构包括垂直预警部分和水平预警部分,垂直预警部分用来采集本监控装置下方的视频图像,水平预警部分用来采集本监控装置侧向的视频图像;所述预警定位机构内设预警定位模块,用以实现预警定位机构对所监控运动目标的预警定位,并控制跟踪示警机构对运动目标进行跟踪示警;The early warning positioning mechanism includes a vertical early warning part and a horizontal early warning part, the vertical early warning part is used to collect the video image below the monitoring device, and the horizontal early warning part is used to collect the lateral video image of the monitoring device; The early warning and positioning module is used to realize the early warning and positioning of the monitored moving target by the early warning and positioning mechanism, and control the tracking and warning mechanism to track and warn the moving target;
所述跟踪示警机构包括跟踪视频采集部分和示警部分,跟踪视频采集部分用来跟踪采集运动目标的视频图像,示警部分用来对运动目标进行示警警告;所述跟踪示警机构内设跟踪示警模块,用以实现跟踪示警机构对所监控运动目标的跟踪示警。The tracking warning mechanism includes a tracking video collection part and a warning part, the tracking video collection part is used to track and collect video images of moving targets, and the warning part is used to warn the moving target; a tracking warning module is set in the tracking warning mechanism, It is used to realize the tracking and warning of the monitored moving target by the tracking and warning mechanism.
所述预警定位模块包括垂直预警视频采集单元、水平预警视频采集单元、光照强度检测单元、辅助照明单元、第一视频转换单元、视频存储单元、动态检测单元、视频合成单元、第二视频转换单元、第一控制单元、第一通讯单元和第二通讯单元。The early warning positioning module includes a vertical early warning video acquisition unit, a horizontal early warning video acquisition unit, an illumination intensity detection unit, an auxiliary lighting unit, a first video conversion unit, a video storage unit, a dynamic detection unit, a video synthesis unit, and a second video conversion unit , a first control unit, a first communication unit and a second communication unit.
所述垂直预警视频采集单元采集监控装置下方监控区域的预警视频(下文简称“垂直预警视频”),并将上述垂直预警视频传输至第一视频转换单元。The vertical warning video acquisition unit collects the warning video of the monitoring area below the monitoring device (hereinafter referred to as "vertical warning video"), and transmits the vertical warning video to the first video conversion unit.
所述水平预警视频采集单元采集监控装置侧向监控区域的预警视频(下文简称“水平预警视频”),并将上述水平预警视频传输至第一视频转换单元。The horizontal early warning video acquisition unit collects the early warning video of the lateral monitoring area of the monitoring device (hereinafter referred to as "horizontal early warning video"), and transmits the horizontal early warning video to the first video conversion unit.
所述第一视频转换单元接收垂直预警视频采集单元、水平预警视频采集单元和跟踪示警模块中跟踪视频采集单元输出的模拟视频信号,并将上述模拟视频信号转换为数字视频信号。The first video conversion unit receives the analog video signal output by the vertical early warning video acquisition unit, the horizontal early warning video acquisition unit and the tracking video acquisition unit in the tracking warning module, and converts the analog video signal into a digital video signal.
所述光照强度检测单元检测监控区域的光照强度,并将检测值传输至第一控制单元,由第一控制单元控制辅助照明单元对监控区域进行辅助照明。The light intensity detection unit detects the light intensity of the monitoring area, and transmits the detection value to the first control unit, and the first control unit controls the auxiliary lighting unit to perform auxiliary lighting on the monitoring area.
所述视频存储单元存储第一视频转换单元输出的数字化后的垂直预警视频、水平预警视频和跟踪视频;而且,在第一控制单元的控制下,视频存储单元可以将其内部存储的数字视频信号传输至视频合成单元。Described video storage unit stores the digitized vertical warning video, horizontal warning video and tracking video outputted by the first video converting unit; and, under the control of the first control unit, the video storage unit can convert its internally stored digital video signal Transfer to the video synthesis unit.
所述动态检测单元检测第一视频转换单元输出的数字化后的垂直预警视频和水平预警视频中的动态,并将运动目标的位置信息转换为对跟踪示警模块的控制指令,上述控制指令通过第一控制单元传输至第二通讯单元,由第二通讯单元将控制指令传输至跟踪示警模块。The dynamic detection unit detects the dynamics in the digitized vertical warning video and horizontal warning video output by the first video conversion unit, and converts the position information of the moving target into a control instruction for the tracking warning module. The above-mentioned control instruction passes through the first The control unit transmits to the second communication unit, and the second communication unit transmits the control command to the tracking and warning module.
所述视频合成单元在第一控制单元的控制下选择从第一视频转换单元或视频存储单元接收数字化后的垂直预警视频、水平预警视频和跟踪视频,并将上述所有视频合成为全景视频数字信号;当检测到运动目标时,视频合成单元在第一控制单元的控制下在相应预警视频图像上叠加例如边框闪烁等报警信号。Under the control of the first control unit, the video synthesis unit selects and receives digitized vertical warning video, horizontal warning video and tracking video from the first video conversion unit or video storage unit, and synthesizes all the above-mentioned videos into a panoramic video digital signal ; When a moving target is detected, the video synthesis unit under the control of the first control unit superimposes alarm signals such as flickering borders on the corresponding warning video image.
所述第二视频转换单元负责将全景视频数字信号转换为模拟复合视频信号,并传输至显示设备。The second video conversion unit is responsible for converting the panoramic video digital signal into an analog composite video signal and transmitting it to the display device.
所述第一控制单元接收动态检测单元提供的对跟踪示警模块的控制指令,并通过第二通讯单元与跟踪示警模块通讯;第一控制单元还接收光照强度检测单元对监控区域光照强度的检测值,并控制开启辅助照明单元;第一控制单元还控制视频合成单元接收来自第一视频转换单元的数字视频信号或接收来自视频存储单元的数字视频信号,并设定合成全景视频数字信号的组合方式;当检测到运动目标时,第一控制单元还控制视频合成单元在相应预警视频图像上叠加报警信号;第一控制单元还控制视频存储单元是否输出其内部存储的数字视频信号;第一控制单元还通过第一通讯单元与主控设备通讯。The first control unit receives the control instruction to the tracking warning module provided by the dynamic detection unit, and communicates with the tracking warning module through the second communication unit; the first control unit also receives the detection value of the light intensity of the monitoring area by the light intensity detection unit , and control to turn on the auxiliary lighting unit; the first control unit also controls the video synthesis unit to receive the digital video signal from the first video conversion unit or receive the digital video signal from the video storage unit, and set the combination method of synthesizing the panoramic video digital signal ; When detecting a moving target, the first control unit also controls the video synthesis unit to superimpose the alarm signal on the corresponding early warning video image; whether the first control unit also controls the video storage unit to output the digital video signal of its internal storage; the first control unit It also communicates with the main control device through the first communication unit.
所述第一通讯单元负责第一控制单元与主控设备的通讯;第二通讯单元负责第一控制单元与跟踪示警模块中的第三通讯单元进行通讯。The first communication unit is responsible for the communication between the first control unit and the main control device; the second communication unit is responsible for the communication between the first control unit and the third communication unit in the tracking and warning module.
所述跟踪示警模块包括跟踪视频采集单元、音频采集单元、光照示警单元、声音示警单元、水平旋转电机驱动单元、垂直旋转电机驱动单元、镜头变焦电机驱动单元、第二控制单元和第三通讯单元。The tracking warning module includes a tracking video acquisition unit, an audio acquisition unit, an illumination warning unit, an audio warning unit, a horizontal rotation motor drive unit, a vertical rotation motor drive unit, a lens zoom motor drive unit, a second control unit and a third communication unit .
所述跟踪视频采集单元采集运动目标所在区域的跟踪视频(下文简称“跟踪视频”),并将上述跟踪视频传输至预警定位模块中的第一视频转换单元。The tracking video acquisition unit collects the tracking video of the area where the moving target is located (hereinafter referred to as "tracking video"), and transmits the tracking video to the first video conversion unit in the early warning positioning module.
所述音频采集单元接收第二控制单元的控制信号,对运动目标所在区域进行音频采集,并将所采集的音频传输给主控设备。The audio collection unit receives the control signal from the second control unit, collects audio from the area where the moving object is located, and transmits the collected audio to the main control device.
所述光照示警单元接收第二控制单元的控制信号,对运动目标所在区域进行光照示警。The light warning unit receives a control signal from the second control unit, and performs a light warning on the area where the moving target is located.
所述声音示警单元接收第二控制单元的控制信号,对运动目标所在区域进行声音示警。The sound warning unit receives the control signal from the second control unit, and gives a sound warning to the area where the moving target is located.
所述水平旋转电机驱动单元接收第二控制单元的控制信号,驱动水平旋转电机旋转。The horizontal rotation motor drive unit receives the control signal from the second control unit to drive the horizontal rotation motor to rotate.
所述垂直旋转电机驱动单元接收第二控制单元的控制信号,驱动垂直旋转电机旋转。The vertical rotation motor drive unit receives the control signal from the second control unit to drive the vertical rotation motor to rotate.
所述镜头变焦电机驱动单元接收第二控制单元的控制信号,驱动镜头变焦电机旋转。The lens zoom motor driving unit receives a control signal from the second control unit to drive the lens zoom motor to rotate.
所述第三通讯单元负责第二控制单元与预警定位模块中的第二通讯单元进行通讯,第二控制单元通过第三通讯单元接收对跟踪示警模块的控制指令;且第二控制单元通过第三通讯单元向预警定位模块中的第二通讯单元发送状态信息,第二通讯单元将上述状态信息传输至第一控制单元。The third communication unit is responsible for the communication between the second control unit and the second communication unit in the early warning positioning module, and the second control unit receives the control instruction to the tracking warning module through the third communication unit; and the second control unit passes through the third The communication unit sends state information to the second communication unit in the early warning positioning module, and the second communication unit transmits the above state information to the first control unit.
所述第二控制单元根据上述对跟踪示警模块的控制指令,控制水平旋转电机驱动单元、垂直旋转电机驱动单元和镜头变焦电机驱动单元;所述第二控制单元控制光照示警单元对所监控运动目标所在区域进行光照示警;所述第二控制单元控制声音示警单元对所监控运动目标所在区域进行声音示警,并选择示警声音的来源;所述第二控制单元还控制音频采集单元对所监控运动目标所在区域进行音频采集。The second control unit controls the horizontal rotation motor drive unit, the vertical rotation motor drive unit and the lens zoom motor drive unit according to the above-mentioned control instructions for the tracking warning module; the second control unit controls the light warning unit to monitor the moving target light warning in the area where it is located; the second control unit controls the sound warning unit to give sound warning to the area where the monitored moving target is located, and selects the source of the warning sound; the second control unit also controls the audio collection unit to give a sound warning to the monitored moving target Audio collection in the area.
所述垂直预警部分包括垂直预警摄像机和辅助照明部件;所述垂直预警摄像机采用广角摄像机(广角镜头和模拟摄像机/数字摄像机的组合);所述辅助照明部件内设的辅助照明单元采用红外灯、激光器、可见光照明设备其中之一或两种以上的组合。The vertical early warning part includes a vertical early warning camera and an auxiliary lighting component; the vertical early warning camera adopts a wide-angle camera (combination of a wide-angle lens and an analog camera/digital camera); the auxiliary lighting unit built in the auxiliary lighting component adopts an infrared lamp, a laser , Visible light lighting equipment, one of them or a combination of two or more.
所述水平预警部分包括水平预警摄像机、水平滑动部件、垂直调节部件和辅助照明部件。The horizontal early warning part includes a horizontal early warning camera, a horizontal sliding part, a vertical adjustment part and an auxiliary lighting part.
所述水平预警摄像机采用长焦摄像机(长焦镜头与模拟摄像机/数字摄像机的组合)或/和变焦摄像机(变焦镜头与模拟摄像机/数字摄像机的组合);采用数量为一组以上。The horizontal early warning camera adopts a telephoto camera (a combination of a telephoto lens and an analog camera/digital camera) or/and a zoom camera (a combination of a zoom lens and an analog camera/digital camera); the number used is more than one group.
所述水平滑动部件包括滑动护罩、上支撑板和下支撑板;所述滑动护罩上下两端设有滑轨;所述上支撑板和下支撑板与滑动护罩接触表面设有与滑动护罩上、下两端滑轨相配合的滑槽。The horizontal sliding part includes a sliding shield, an upper supporting plate and a lower supporting plate; the upper and lower ends of the sliding shield are provided with slide rails; the contact surface of the upper supporting plate and the lower supporting plate is provided with a sliding The chute that matches the slide rails at the upper and lower ends of the guard.
所述垂直调节部件包括摄像机支架和摄像机支架安装板;所述摄像机支架两侧设有两个转动轴和两个滑动轴,摄像机支架安装板两侧对应设有两个定位孔和两个弧形孔,摄像机支架一端的两个转动轴放置在摄像机支架安装板两侧的两个定位孔上转动连接,另一端的两个滑动轴与摄像机支架安装板两个弧形孔间隙配合。The vertical adjustment component includes a camera bracket and a camera bracket mounting plate; two rotating shafts and two sliding shafts are provided on both sides of the camera bracket, and two positioning holes and two arc-shaped holes are correspondingly provided on both sides of the camera bracket mounting plate. The two rotating shafts at one end of the camera bracket are placed on the two positioning holes on both sides of the camera bracket mounting plate for rotational connection, and the two sliding shafts at the other end are clearance-fitted with the two arc holes of the camera bracket mounting plate.
所述水平预警摄像机设置于垂直调节部件内的摄像机支架上,且通过摄像机支架与摄像机支架安装板的转动连接调节水平预警摄像机的垂直转角;垂直调节部件内的摄像机支架安装板固定安放在水平滑动部件的滑动护罩内,且通过滑动护罩与上支撑板和下支撑板的滑动连接调节水平预警摄像机的水平转角。The horizontal early warning camera is arranged on the camera bracket in the vertical adjustment part, and the vertical angle of the horizontal early warning camera is adjusted through the rotation connection between the camera bracket and the camera bracket mounting plate; In the sliding cover of the parts, and through the sliding connection between the sliding cover and the upper support plate and the lower support plate, the horizontal rotation angle of the horizontal early warning camera is adjusted.
所述跟踪视频采集部分包括跟踪摄像机、水平旋转机构和垂直旋转机构,所述示警部分包括音频采集器、报警器和示警灯。The tracking video acquisition part includes a tracking camera, a horizontal rotation mechanism and a vertical rotation mechanism, and the warning part includes an audio collector, an alarm and a warning light.
所述跟踪摄像机采用变焦镜头和模拟摄像机/数字摄像机的组合。所述跟踪摄像机采用变焦摄像机,由镜头变焦电机驱动镜头变焦,即镜头变焦电机接收镜头变焦电机驱动单元的驱动信号,在驱动信号的控制下,镜头变焦电机带动变焦镜头镜组转动,最终使运动目标在跟踪视频上所占面积和图像清晰度达到最佳状态。The tracking camera uses a zoom lens and a combination analog/digital camera. The tracking camera adopts a zoom camera, and the lens zoom is driven by a lens zoom motor, that is, the lens zoom motor receives the drive signal of the lens zoom motor drive unit, and under the control of the drive signal, the lens zoom motor drives the zoom lens group to rotate, and finally the movement The area occupied by the target on the tracking video and the image clarity are optimal.
所述水平旋转机构由水平旋转电机和同步带机构组成;垂直旋转机构由垂直旋转电机和同步带机构组成;所述水平旋转电机接收水平旋转电机驱动单元的驱动信号,在驱动信号的控制下,水平旋转电机带动跟踪示警机构转动,最终使跟踪示警机构在水平方向上朝向运动目标所在区域;所述垂直旋转电机接收垂直旋转电机驱动单元的驱动信号,在驱动信号的控制下,垂直旋转电机带动跟踪示警机构转动,最终使跟踪示警机构在垂直方向上朝向运动目标所在区域。The horizontal rotation mechanism is composed of a horizontal rotation motor and a synchronous belt mechanism; the vertical rotation mechanism is composed of a vertical rotation motor and a synchronous belt mechanism; the horizontal rotation motor receives the drive signal of the horizontal rotation motor drive unit, and under the control of the drive signal, The horizontal rotation motor drives the tracking and warning mechanism to rotate, and finally makes the tracking and warning mechanism move towards the area where the moving target is located in the horizontal direction; the vertical rotation motor receives the drive signal of the vertical rotation motor drive unit, and under the control of the drive signal, the vertical rotation motor drives The tracking and warning mechanism rotates, and finally the tracking and warning mechanism is directed towards the area where the moving target is located in the vertical direction.
本发明机械结构实现部分:The mechanical structure realization part of the present invention:
本发明的预警定位机构包括垂直预警部分和水平预警部分,其中垂直预警部分由垂直预警摄像机和辅助照明部件构成,其中水平预警部分由水平预警摄像机、水平滑动部件、垂直调节部件及辅助照明部件构成,其中水平滑动部件包括滑动护罩,上支撑板和下支撑板,垂直调节部件包括摄像机支架和摄像机支架安装板。The early warning positioning mechanism of the present invention includes a vertical early warning part and a horizontal early warning part, wherein the vertical early warning part is composed of a vertical early warning camera and auxiliary lighting components, and wherein the horizontal early warning part is composed of a horizontal early warning camera, a horizontal sliding part, a vertical adjustment part and an auxiliary lighting part , wherein the horizontal sliding part includes a sliding shield, an upper support plate and a lower support plate, and the vertical adjustment part includes a camera bracket and a camera bracket mounting plate.
预警定位机构内各部件连接关系:The connection relationship of each component in the early warning and positioning mechanism:
垂直预警部分安放在整个监控装置的下方,垂直预警摄像机镜头垂直指向下方,辅助照明部件固定安放在垂直预警摄像机镜头周围。The vertical early warning part is placed under the whole monitoring device, the lens of the vertical early warning camera points vertically downward, and the auxiliary lighting components are fixedly arranged around the lens of the vertical early warning camera.
水平预警部分安放在垂直预警部分的上方,主要由水平预警摄像机、水平滑动部件、垂直调节部件和辅助照明部件构成。其中水平预警摄像机放置在滑动护罩内并位于视窗后侧,水平滑动部件由上下两端设有滑轨的滑动护罩和与滑动护罩接触表面上设有滑槽的上、下支撑板构成,上、下支撑板固定在连接轴上,连接轴在整个监控装置的垂直轴心位置起支撑作用,通过滑轨与滑槽的滑动连接使滑动护罩在上、下支撑板之间进行滑动,从而调节安放在滑动护罩内水平预警摄像机的水平转角,滑动护罩调节完后通过螺钉在滑动护罩定位孔上将滑动护罩与下支撑板固定连接;其中垂直调节部件由设有转动轴和滑动轴的摄像机支架与设有定位孔和弧形孔的摄像机支架安装板构成,其中摄像机支架两侧分别对称设有两个转动轴和两个滑动轴,摄像机支架安装板两侧对应设有与摄像机支架相配合的两个定位孔和两个弧形孔,摄像机支架一端的两个转动轴放置在摄像机支架安装板对应端两侧的两个定位孔上转动连接,摄像机支架另一端的两个滑动轴与摄像机支架安装板对应端的两个弧形孔间隙配合,目的使摄像机支架在摄像机支架安装板上可绕定位孔旋转,从而调节安装在摄像机支架上水平预警摄像机的垂直转角。The horizontal early warning part is placed above the vertical early warning part, and is mainly composed of a horizontal early warning camera, a horizontal sliding part, a vertical adjustment part and an auxiliary lighting part. The horizontal early warning camera is placed in the sliding shield and is located at the rear side of the window. The horizontal sliding part is composed of a sliding shield with slide rails at the upper and lower ends and upper and lower support plates with chute on the contact surface with the sliding shield. , the upper and lower support plates are fixed on the connecting shaft, and the connecting shaft plays a supporting role at the vertical axis position of the entire monitoring device, and the sliding guard slides between the upper and lower support plates through the sliding connection between the slide rail and the chute , so as to adjust the horizontal angle of the horizontal early warning camera placed in the sliding cover. After the sliding cover is adjusted, the sliding cover is fixedly connected with the lower support plate on the positioning hole of the sliding cover through screws; the vertical adjustment part is provided with a rotating The camera bracket of the shaft and the sliding shaft is composed of a camera bracket mounting plate provided with positioning holes and arc-shaped holes, wherein two rotating shafts and two sliding shafts are symmetrically arranged on both sides of the camera bracket, and correspondingly set on both sides of the camera bracket mounting plate. There are two positioning holes and two arc-shaped holes matched with the camera bracket. The two rotating shafts at one end of the camera bracket are placed on the two positioning holes on both sides of the corresponding end of the camera bracket mounting plate to rotate and connect. The other end of the camera bracket The two sliding shafts are matched with the two arc-shaped holes at the corresponding end of the camera bracket mounting plate, so that the camera bracket can rotate around the positioning hole on the camera bracket mounting plate, thereby adjusting the vertical angle of the horizontal early warning camera installed on the camera bracket.
本发明的跟踪示警机构包括跟踪视频采集部分和示警部分,其中跟踪视频采集部分由跟踪摄像机、水平旋转机构和垂直旋转机构组成,其中水平旋转机构由水平旋转电机和同步带机构b组成,垂直旋转机构由垂直旋转电机和同步带机构a组成,示警部分由音频采集器、报警器和示警灯组成。The tracking warning mechanism of the present invention includes a tracking video acquisition part and a warning part, wherein the tracking video acquisition part is composed of a tracking camera, a horizontal rotation mechanism and a vertical rotation mechanism, wherein the horizontal rotation mechanism is composed of a horizontal rotation motor and a synchronous belt mechanism b, and the vertical rotation The mechanism is composed of a vertical rotating motor and a synchronous belt mechanism a, and the warning part is composed of an audio collector, an alarm and a warning light.
跟踪示警机构内各部件连接关系为:The connection relationship of each component in the tracking warning mechanism is as follows:
跟踪视频采集部分和示警部分分别安放在预警定位机构的上方,跟踪摄像机安放在驱动机箱上,水平旋转机构和垂直旋转机构安放在驱动机箱内,音频采集器和报警器放置在声音示警装置内,示警灯放置在光照示警装置内,声音示警装置和光照示警装置也固定在驱动机箱上。跟踪视频采集部分和示警部分通过水平旋转机构和垂直旋转机构进行水平/垂直转动,从而对监控目标进行跟踪监控和示警。The tracking video acquisition part and the warning part are respectively placed above the early warning positioning mechanism, the tracking camera is placed on the drive chassis, the horizontal rotation mechanism and the vertical rotation mechanism are placed in the drive chassis, and the audio collector and alarm are placed in the sound warning device. The warning light is placed in the light warning device, and the sound warning device and the light warning device are also fixed on the drive case. The tracking video acquisition part and the warning part perform horizontal/vertical rotation through the horizontal rotation mechanism and the vertical rotation mechanism, so as to track, monitor and warn the monitoring target.
本发明电控实现部分:The electronic control realization part of the present invention:
本发明的垂直预警视频采集单元采用垂直预警摄像机,负责采集监控装置下方监控区域的预警视频,并将上述垂直预警视频传输至与其连接的第一视频转换单元。The vertical warning video collection unit of the present invention adopts a vertical warning camera, which is responsible for collecting the warning video of the monitoring area below the monitoring device, and transmits the vertical warning video to the first video conversion unit connected thereto.
水平预警视频采集单元采用水平预警摄像机,负责采集监控装置侧向监控区域的预警视频,并将上述水平预警视频传输至与其连接的第一视频转换单元。The horizontal early warning video acquisition unit adopts a horizontal early warning camera, which is responsible for collecting the early warning video of the lateral monitoring area of the monitoring device, and transmitting the above horizontal early warning video to the first video conversion unit connected to it.
跟踪视频采集单元采用跟踪摄像机,负责采集监控区域内对运动目标的跟踪视频,并将上述跟踪视频传输至与其连接的第一视频转换单元。The tracking video collection unit adopts a tracking camera, which is responsible for collecting tracking videos of moving objects in the monitoring area, and transmitting the tracking videos to the first video conversion unit connected to it.
光照强度检测单元负责检测监控区域的光照强度。光照强度检测单元与第一控制单元相连接,将光照强度检测值传输至第一控制单元。The light intensity detection unit is responsible for detecting the light intensity of the monitoring area. The light intensity detection unit is connected to the first control unit, and transmits the light intensity detection value to the first control unit.
辅助照明单元负责对监控区域进行辅助照明。辅助照明单元与第一控制单元相连接,第一控制单元根据光照强度检测单元对光照强度的检测值判断,当上述检测值低于设定值时,第一控制单元控制辅助照明单元对监控区域进行辅助照明。The auxiliary lighting unit is responsible for auxiliary lighting of the monitoring area. The auxiliary lighting unit is connected with the first control unit, and the first control unit judges according to the detection value of the light intensity by the light intensity detection unit. When the detection value is lower than the set value, the first control unit controls the auxiliary lighting unit to monitor the area For auxiliary lighting.
第一视频转换单元负责将上述垂直预警视频、水平预警视频和跟踪视频转换为数字视频信号。第一视频转换单元与垂直预警视频采集单元、水平预警视频采集单元和跟踪视频采集单元相连接,从上述各单元中接收垂直预警视频、水平预警视频和跟踪视频,并将上述各视频信号转换为数字视频信号后传输至与第一视频转换单元相连接的视频存储单元和视频合成单元,而且,第一视频转换单元还将数字化后的垂直预警视频和水平预警视频传输至与其相连接的动态检测单元。The first video conversion unit is responsible for converting the above-mentioned vertical warning video, horizontal warning video and tracking video into digital video signals. The first video conversion unit is connected with the vertical early warning video acquisition unit, the horizontal early warning video acquisition unit and the tracking video acquisition unit, receives the vertical early warning video, the horizontal early warning video and the tracking video from the above-mentioned units, and converts the above-mentioned video signals into The digital video signal is then transmitted to the video storage unit and the video synthesis unit connected to the first video conversion unit, and the first video conversion unit also transmits the digitized vertical warning video and horizontal warning video to the dynamic detection unit connected to it. unit.
视频存储单元负责存储数字化后的垂直预警视频、水平预警视频和跟踪视频,并且在第一控制单元的控制下,视频存储单元可以将其内部存储的数字化后的垂直预警视频、水平预警视频和跟踪视频传输至视频合成单元。视频存储单元与第一视频转换单元相连接,从第一视频转换单元接收数字化后的垂直预警视频、水平预警视频和跟踪视频,并将上述数字视频信号存储于视频存储单元内的存储介质中。视频存储单元还与第一控制单元和视频合成单元相连接,在第一控制单元的控制下,视频存储单元也可以将其内部存储的数字化后的垂直预警视频、水平预警视频和跟踪视频传输至视频合成单元。The video storage unit is responsible for storing the digitized vertical warning video, horizontal warning video and tracking video, and under the control of the first control unit, the video storage unit can store the digital vertical warning video, horizontal warning video and tracking video in its internal storage. The video is transferred to the video compositing unit. The video storage unit is connected with the first video conversion unit, receives digitized vertical warning video, horizontal warning video and tracking video from the first video conversion unit, and stores the digital video signals in the storage medium in the video storage unit. The video storage unit is also connected with the first control unit and the video synthesis unit. Under the control of the first control unit, the video storage unit can also transmit the digitized vertical early warning video, horizontal early warning video and tracking video of its internal storage to Video composition unit.
动态检测单元负责检测数字化后的垂直预警视频和水平预警视频中的动态,计算运动目标的位置信息并将所述位置信息转换为对跟踪示警模块的控制指令。动态检测单元与第一视频转换单元相连接,从第一视频转换单元接收数字化后的垂直预警视频和水平预警视频。动态检测单元检测上述数字化后的垂直预警视频和水平预警视频中的动态,计算运动目标的位置信息并将所述位置信息转换为对跟踪示警模块的控制指令。动态检测单元还与第一控制单元相连接,将上述对跟踪示警模块的控制指令传输至第一控制单元。The dynamic detection unit is responsible for detecting the dynamics in the digitized vertical warning video and horizontal warning video, calculating the position information of the moving target and converting the position information into control instructions for the tracking and warning module. The dynamic detection unit is connected with the first video conversion unit, and receives the digitized vertical warning video and horizontal warning video from the first video conversion unit. The dynamic detection unit detects the dynamics in the digitized vertical early warning video and horizontal early warning video, calculates the position information of the moving target and converts the position information into control instructions for the tracking and warning module. The dynamic detection unit is also connected to the first control unit, and transmits the above-mentioned control instructions for the tracking and warning module to the first control unit.
视频合成单元负责将数字化后的垂直预警视频、水平预警视频和跟踪视频合成为全景视频数字信号。视频合成单元与第一视频转换单元和第一控制单元相连接,从第一视频转换单元接收数字化后的垂直预警视频、水平预警视频和跟踪视频,并在第一控制单元的控制下按照设定的构成方式将上述数字化后的垂直预警视频、水平预警视频和跟踪视频合成为全景视频数字信号。当检测到运动目标时,视频合成单元在第一控制单元的控制下在相应预警视频图像上叠加例如边框闪烁等报警信号。视频合成单元还与视频存储单元相连接,在第一控制单元的控制下,视频合成单元可以改由从视频存储单元接收数字化后的垂直预警视频、水平预警视频和跟踪视频,此时第一控制单元控制视频合成单元不再接收第一视频转换单元输出的数字化后的垂直预警视频、水平预警视频和跟踪视频。视频合成单元接收来自于视频存储单元的数字化后的垂直预警视频、水平预警视频和跟踪视频为视频存储单元内存储的录像。The video synthesis unit is responsible for synthesizing the digitized vertical warning video, horizontal warning video and tracking video into a panoramic video digital signal. The video synthesis unit is connected with the first video conversion unit and the first control unit, receives the digitized vertical warning video, horizontal warning video and tracking video from the first video conversion unit, and under the control of the first control unit according to the set The composition mode synthesizes the above-mentioned digitized vertical early warning video, horizontal early warning video and tracking video into a panoramic video digital signal. When a moving target is detected, the video synthesis unit superimposes an alarm signal such as a flickering frame on the corresponding warning video image under the control of the first control unit. The video synthesis unit is also connected with the video storage unit. Under the control of the first control unit, the video synthesis unit can receive the digitized vertical warning video, horizontal warning video and tracking video from the video storage unit instead. At this moment, the first control The unit controls the video synthesis unit to no longer receive the digitized vertical warning video, horizontal warning video and tracking video output by the first video converting unit. The video synthesizing unit receives the digitized vertical warning video, horizontal warning video and tracking video from the video storage unit as video stored in the video storage unit.
第二视频转换单元负责将全景视频数字信号转换为模拟复合视频信号,并传输至显示设备。第二视频转换单元与视频合成单元相连接,从视频合成单元接收合成后的全景视频数字信号,并将上述全景视频数字信号转换为模拟复合视频信号后传输至显示设备。The second video conversion unit is responsible for converting the panoramic video digital signal into an analog composite video signal and transmitting it to the display device. The second video conversion unit is connected to the video synthesis unit, receives the synthesized panoramic video digital signal from the video synthesis unit, converts the panoramic video digital signal into an analog composite video signal, and transmits it to the display device.
第一通讯单元负责第一控制单元与主控设备的通讯。第一通讯单元与第一控制单元和主控设备相连接,第一通讯单元接收主控设备发出的控制指令,并将上述控制指令传输至第一控制单元。第一通讯单元还接收第一控制单元发出的状态信息,并将上述状态信息传输至主控设备。当检测到运动目标时,第一通讯单元将第一控制单元发出的报警指令传输至主控设备。The first communication unit is responsible for the communication between the first control unit and the main control device. The first communication unit is connected with the first control unit and the main control device, and the first communication unit receives the control command sent by the main control device, and transmits the control command to the first control unit. The first communication unit also receives the status information sent by the first control unit, and transmits the status information to the main control device. When a moving object is detected, the first communication unit transmits the alarm command sent by the first control unit to the main control device.
第一控制单元负责接收动态检测单元提供的对跟踪示警模块的控制指令,并通过第二通讯单元与跟踪示警模块通讯。第一控制单元还负责接收光照强度检测单元对监控区域光照强度的检测值,并控制开启辅助照明单元。第一控制单元还负责控制视频合成单元接收来自第一视频转换单元的数字视频信号或接收来自视频存储单元的数字视频信号,并设定合成全景视频数字信号的组合方式。当检测到运动目标时,第一控制单元还负责控制视频合成单元在相应预警视频图像上叠加报警信号。第一控制单元还负责控制视频存储单元是否输出其内部存储的数字视频信号。第一控制单元还负责通过第一通讯单元与主控设备通讯。第一控制单元与动态检测单元相连接,从动态检测单元接收对跟踪示警模块的控制指令,并通过第二通讯单元将上述对跟踪示警模块的控制指令传输至跟踪示警模块,同时,第一控制单元还通过第二通讯单元从跟踪示警模块接收状态信息。第一控制单元还与光照强度检测单元和辅助照明单元相连接,第一控制单元从光照强度检测单元接收对监控区域光照强度的检测值,当上述检测值低于设定值时,第一控制单元控制开启辅助照明单元对监控区域进行辅助照明。第一控制单元还与视频合成单元相连接,第一控制单元控制视频合成单元从第一视频转换单元或从视频存储单元接收数字化后的垂直预警视频、水平预警视频和跟踪视频,第一控制单元还控制视频合成单元按照设定的构成方式将上述数字化后的垂直预警视频、水平预警视频和跟踪视频合成为全景视频数字信号。当检测到运动目标时,第一控制单元控制视频合成单元在相应预警视频图像上叠加例如边框闪烁等报警信号。第一控制单元还与视频存储单元相连接,第一控制单元控制视频存储单元可以将其内部存储的数字化后的垂直预警视频、水平预警视频和跟踪视频传输至视频合成单元,此时第一控制单元控制视频合成单元不再接收第一视频转换单元输出的数字化后的垂直预警视频、水平预警视频和跟踪视频。第一控制单元还与第一通讯单元相连接,第一控制单元通过第一通讯单元接收主控设备发送的控制指令,同时,第一控制单元还通过第一通讯单元向主控设备发送状态信息。当检测到运动目标时,第一控制单元还通过第一通讯单元向主控设备发送报警指令,用于触发主控设备的报警动作。The first control unit is in charge of receiving the control instruction for the tracking and warning module provided by the dynamic detection unit, and communicates with the tracking and warning module through the second communication unit. The first control unit is also responsible for receiving the detection value of the light intensity in the monitoring area from the light intensity detection unit, and controlling to turn on the auxiliary lighting unit. The first control unit is also responsible for controlling the video synthesis unit to receive the digital video signal from the first video conversion unit or the digital video signal from the video storage unit, and to set the combination method for synthesizing the panoramic video digital signal. When a moving target is detected, the first control unit is also responsible for controlling the video synthesis unit to superimpose an alarm signal on the corresponding early warning video image. The first control unit is also responsible for controlling whether the video storage unit outputs the digital video signal stored inside it. The first control unit is also responsible for communicating with the main control device through the first communication unit. The first control unit is connected with the dynamic detection unit, receives the control command to the tracking warning module from the dynamic detection unit, and transmits the above-mentioned control command to the tracking warning module to the tracking warning module through the second communication unit, and at the same time, the first control The unit also receives status information from the tracking alert module via the second communication unit. The first control unit is also connected with the light intensity detection unit and the auxiliary lighting unit. The first control unit receives the detection value of the light intensity of the monitoring area from the light intensity detection unit. When the detection value is lower than the set value, the first control unit The unit controls to turn on the auxiliary lighting unit to provide auxiliary lighting for the monitoring area. The first control unit is also connected with the video synthesis unit, the first control unit controls the video synthesis unit to receive the digitized vertical warning video, horizontal warning video and tracking video from the first video conversion unit or from the video storage unit, the first control unit The video synthesis unit is also controlled to synthesize the digitized vertical warning video, horizontal warning video and tracking video into a panoramic video digital signal according to the set composition method. When a moving target is detected, the first control unit controls the video synthesis unit to superimpose an alarm signal such as a flickering frame on the corresponding warning video image. The first control unit is also connected with the video storage unit, and the first control unit controls the video storage unit to transmit the digitized vertical warning video, horizontal warning video and tracking video of its internal storage to the video synthesis unit. The unit controls the video synthesis unit to no longer receive the digitized vertical warning video, horizontal warning video and tracking video output by the first video converting unit. The first control unit is also connected to the first communication unit, and the first control unit receives the control command sent by the main control device through the first communication unit, and at the same time, the first control unit also sends status information to the main control device through the first communication unit . When a moving target is detected, the first control unit also sends an alarm command to the main control device through the first communication unit, so as to trigger an alarm action of the main control device.
第二通讯单元负责第一控制单元与跟踪示警模块的通讯。第二通讯单元与第一控制单元和跟踪示警模块中的第三通讯单元相连接,第二通讯单元接收第一控制单元发出的控制指令,并将上述控制指令传输至第三通讯单元。第二通讯单元还接收第三通讯单元传输的跟踪示警模块状态信息,并将上述状态信息传输至第一控制单元。The second communication unit is responsible for the communication between the first control unit and the tracking and warning module. The second communication unit is connected with the first control unit and the third communication unit in the tracking and warning module, the second communication unit receives the control command sent by the first control unit, and transmits the control command to the third communication unit. The second communication unit also receives the status information of the tracking and warning module transmitted by the third communication unit, and transmits the status information to the first control unit.
第三通讯单元负责第二控制单元与预警定位模块的通讯。第三通讯单元与第二控制单元和预警定位模块中的第二通讯单元相连接,第三通讯单元接收第二通讯单元传输的预警定位模块的控制指令,并将上述控制指令传输至第二控制单元。第三通讯单元还接收第二控制单元发出的状态信息,并将上述状态信息传输至第二通讯单元。The third communication unit is responsible for the communication between the second control unit and the early warning positioning module. The third communication unit is connected with the second communication unit in the second control unit and the early warning positioning module, the third communication unit receives the control command of the early warning positioning module transmitted by the second communication unit, and transmits the above control command to the second control unit unit. The third communication unit also receives the status information sent by the second control unit, and transmits the status information to the second communication unit.
第二控制单元负责通过第三通讯单元与预警定位模块通讯;第二控制单元还负责根据对跟踪示警模块的控制指令,控制水平旋转电机驱动单元、垂直旋转电机驱动单元和镜头变焦电机驱动单元;第二控制单元还负责控制光照示警单元对运动目标所在区域进行光照示警;第二控制单元还负责控制声音示警单元对运动目标所在区域进行声音示警,并选择示警声音的来源;第二控制单元还负责控制音频采集单元对运动目标所在区域进行音频采集。第二控制单元与第三通讯单元相连接,第二控制单通过第三通讯单元接收来自预警定位模块的控制指令,同时,第二控制单元还通过第三通讯单元向预警定位模块发送状态信息。第二控制单元还与水平旋转电机驱动单元、垂直旋转电机驱动单元和镜头变焦电机驱动单元相连接,第二控制单元根据跟踪示警模块的控制指令产生对水平旋转电机驱动单元、垂直旋转电机驱动单元和镜头变焦电机驱动单元的控制信号。第二控制单元还与光照示警单元相连接,第二控制单元控制光照示警单元对运动目标所在区域进行光照示警。第二控制单元还与声音示警单元相连接,第二控制单元控制声音示警单元对运动目标所在区域进行声音示警,第二控制单元选择示警声音的来源。第二控制单元还与音频采集单元相连接,第二控制单元控制音频采集单元对运动目标所在区域进行音频采集。The second control unit is responsible for communicating with the early warning positioning module through the third communication unit; the second control unit is also responsible for controlling the horizontal rotation motor drive unit, the vertical rotation motor drive unit and the lens zoom motor drive unit according to the control instructions to the tracking warning module; The second control unit is also responsible for controlling the light warning unit to perform light warning on the area where the moving target is located; the second control unit is also responsible for controlling the sound warning unit to perform sound warning on the area where the moving target is located, and selects the source of the warning sound; Responsible for controlling the audio collection unit to collect audio from the area where the moving target is located. The second control unit is connected to the third communication unit, and the second control unit receives the control command from the early warning and positioning module through the third communication unit, and at the same time, the second control unit also sends status information to the early warning and positioning module through the third communication unit. The second control unit is also connected with the horizontal rotation motor drive unit, the vertical rotation motor drive unit and the lens zoom motor drive unit. And the control signal of the lens zoom motor drive unit. The second control unit is also connected with the light warning unit, and the second control unit controls the light warning unit to give light warning to the area where the moving target is located. The second control unit is also connected with the sound warning unit, the second control unit controls the sound warning unit to give sound warning to the area where the moving target is located, and the second control unit selects the source of the warning sound. The second control unit is also connected to the audio collection unit, and the second control unit controls the audio collection unit to collect audio from the area where the moving target is located.
水平旋转电机驱动单元负责驱动水平旋转电机。水平旋转电机驱动单元与第二控制单元和水平旋转电机相连接,水平旋转电机驱动单元接收第二控制单元的控制信号,驱动水平旋转电机旋转。The panning motor driving unit is responsible for driving the panning motor. The horizontal rotation motor drive unit is connected with the second control unit and the horizontal rotation motor, and the horizontal rotation motor drive unit receives the control signal from the second control unit to drive the horizontal rotation motor to rotate.
垂直旋转电机驱动单元负责驱动垂直旋转电机。垂直旋转电机驱动单元与第二控制单元和垂直旋转电机相连接,垂直旋转电机驱动单元接收第二控制单元的控制信号,驱动垂直旋转电机旋转。The vertical rotation motor driving unit is responsible for driving the vertical rotation motor. The vertical rotation motor drive unit is connected with the second control unit and the vertical rotation motor, and the vertical rotation motor drive unit receives the control signal from the second control unit to drive the vertical rotation motor to rotate.
镜头变焦电机驱动单元负责驱动镜头变焦电机。镜头变焦电机驱动单元与第二控制单元和镜头变焦电机相连接,镜头变焦电机驱动单元接收第二控制单元的控制信号,驱动镜头变焦电机旋转。The lens zoom motor driving unit is responsible for driving the lens zoom motor. The lens zoom motor drive unit is connected with the second control unit and the lens zoom motor, and the lens zoom motor drive unit receives the control signal from the second control unit to drive the lens zoom motor to rotate.
水平旋转电机负责带动跟踪示警机构在水平方向上旋转。水平旋转电机与水平旋转电机驱动单元和跟踪示警机构相连接,水平旋转电机接收水平旋转电机驱动单元的驱动信号,带动跟踪示警机构在水平方向上旋转。The horizontal rotation motor is responsible for driving the tracking warning mechanism to rotate in the horizontal direction. The horizontal rotation motor is connected with the horizontal rotation motor drive unit and the tracking warning mechanism, and the horizontal rotation motor receives the driving signal from the horizontal rotation motor drive unit, and drives the tracking warning mechanism to rotate in the horizontal direction.
垂直旋转电机负责带动跟踪示警机构在垂直方向上旋转。垂直旋转电机与垂直旋转电机驱动单元和跟踪示警机构相连接,垂直旋转电机接收垂直旋转电机驱动单元的驱动信号,带动跟踪示警机构在垂直方向上旋转。The vertical rotation motor is responsible for driving the tracking warning mechanism to rotate in the vertical direction. The vertical rotation motor is connected with the vertical rotation motor drive unit and the tracking warning mechanism, and the vertical rotation motor receives the driving signal from the vertical rotation motor drive unit to drive the tracking warning mechanism to rotate in the vertical direction.
镜头变焦电机负责调整镜头焦距,使运动目标在跟踪视频上所占面积和清晰度最佳。镜头变焦电机与镜头变焦电机驱动单元和变焦镜头镜组相连接,镜头变焦电机接收镜头变焦电机驱动单元的驱动信号,带动变焦镜头镜组转动从而改变镜头焦距,最终使运动目标在跟踪视频上所占面积和图像清晰度达到最佳状态。The lens zoom motor is responsible for adjusting the focal length of the lens, so that the moving target occupies the best area and definition on the tracking video. The lens zoom motor is connected with the lens zoom motor drive unit and the zoom lens mirror group, the lens zoom motor receives the drive signal of the lens zoom motor drive unit, drives the zoom lens mirror group to rotate to change the focal length of the lens, and finally enables the moving target to be tracked on the video. The footprint and image clarity are at their best.
光照示警单元负责对运动目标所在区域进行光照示警。光照示警单元与第二控制单元相连接,光照示警单元在第二控制单元的控制下对运动目标所在区域进行光照示警。The light warning unit is responsible for light warning of the area where the moving target is located. The light warning unit is connected with the second control unit, and under the control of the second control unit, the light warning unit gives light warning to the area where the moving target is located.
声音示警单元负责对运动目标所在区域进行声音示警。声音示警单元与第二控制单元相连接,声音示警单元在第二控制单元的控制下对运动目标所在区域进行声音示警,用于示警的示警声音来源可由第二控制单元选择。The sound warning unit is responsible for giving sound warning to the area where the moving target is located. The sound warning unit is connected with the second control unit, and under the control of the second control unit, the sound warning unit gives a sound warning to the area where the moving object is located, and the source of the warning sound used for warning can be selected by the second control unit.
音频采集单元负责对运动目标所在区域进行音频采集。音频采集单元与第二控制单元相连接,音频采集单元在第二控制单元的控制下对运动目标所在区域进行音频采集。The audio collection unit is responsible for audio collection of the area where the moving target is located. The audio collection unit is connected with the second control unit, and the audio collection unit performs audio collection on the area where the moving target is located under the control of the second control unit.
以上机械部分的垂直预警摄像机、水平预警摄像机和跟踪摄像机分别对应电控部分的垂直预警视频采集单元、水平预警视频采集单元和跟踪视频采集单元。The vertical early warning camera, horizontal early warning camera and tracking camera of the above mechanical part correspond to the vertical early warning video acquisition unit, horizontal early warning video acquisition unit and tracking video acquisition unit of the electronic control part respectively.
预警定位自动跟踪算法步骤:Early warning positioning automatic tracking algorithm steps:
步骤1对监控区域内预警视频图像进行图像智能算法分析;
步骤2对多摄像机监控区域内的运动目标进行运动分析;
步骤3在监控范围内对有效区域内的运动目标进行筛选;
步骤4制定跟踪策略;
步骤5处理跟踪控制信号。Step 5 processes the tracking control signal.
本发明的有益效果是:The beneficial effects of the present invention are:
(1)本发明采用水平方向和垂直方向可调的水平预警摄像机采集本监控装置侧向的视频图像,和采用垂直预警摄像机采集本监控装置下方的视频图像,在两部分视频图像上分别进行预警定位,并通过控制跟踪示警机构对运动目标进行跟踪示警;由此,能够弥补通常只采用的广角摄像机进行全景监控,由于视频图像扭曲和畸变,造成全景监控有效范围小的问题。(1) The present invention adopts the horizontal early warning camera that the horizontal direction and the vertical direction can be adjusted to collect the video image of this monitoring device side, and adopts the vertical early warning camera to collect the video image below this monitoring device, and carries out early warning respectively on two parts of video images Positioning, and tracking and warning of moving targets by controlling the tracking and warning mechanism; thus, it can make up for the problem that the wide-angle camera is usually used for panoramic monitoring, and the effective range of panoramic monitoring is small due to video image distortion and distortion.
(2)由于水平预警部分视频采集装置(水平预警摄像机)的位置和数量可调,且相应优化配套的机械结构设计以实现多方向监控区域的可调性,进一步提高了其适用性和灵活性,并且实现了监控区域的多方向调节,因此采用该监控装置的系统可广泛适用于不同环境和场所的需求;相比定点视频采集装置与旋转视频采集装置配合的跟踪监控装置,具有扩大监控区域的效果,即实现了多方向监控区域的监控,尤其是实现了范围更大的预警定位和自动跟踪监控。(2) Since the position and quantity of the video acquisition device (horizontal warning camera) of the horizontal early warning part can be adjusted, and the corresponding mechanical structure design is optimized to realize the adjustability of the multi-directional monitoring area, further improving its applicability and flexibility , and realize the multi-directional adjustment of the monitoring area, so the system using the monitoring device can be widely applied to the needs of different environments and places; compared with the tracking monitoring device with fixed-point video acquisition device and rotating video acquisition device, it has the ability to expand the monitoring area The effect is to realize the monitoring of multi-directional monitoring areas, especially to achieve a wider range of early warning positioning and automatic tracking and monitoring.
(3)由于本发明采用了辅助光源部件,因此解决了定点视频采集装置与旋转视频采集装置配合的跟踪监控装置不能在夜间或低照度情况下使用的问题;即使在夜间或低照度情况下,本监控装置仍可对监控区域内的运动目标进行准确可靠的预警定位跟踪。(3) Since the present invention has adopted the auxiliary light source part, therefore solved the problem that the tracking and monitoring device that the fixed-point video acquisition device cooperates with the rotating video acquisition device cannot be used at night or under low-illuminance conditions; even at night or under low-illuminance conditions, The monitoring device can still perform accurate and reliable early warning, positioning and tracking of moving targets in the monitoring area.
(4)由于本发明采用与跟踪采集装置同步运动的声光示警装置,在跟踪运动目标的同时,本装置采取主动示警方式对运动目标进行声光示警;因而相比定点视频采集装置与旋转视频采集装置配合的跟踪监控装置只跟踪运动目标的被动记录方法,采取主动示警的方法对运动目标的行为做有效反应。(4) Since the present invention adopts the acousto-optic warning device that moves synchronously with the tracking acquisition device, while tracking the moving target, the device adopts an active warning mode to carry out sound and light warning to the moving target; The tracking and monitoring device matched with the acquisition device only tracks the passive recording method of the moving target, and takes the active warning method to effectively respond to the behavior of the moving target.
(5)由于本发明为预警定位和跟踪示警一体化装置,具有结构简单,安装操作方便,尤其是解决了由多个监控设备组合完成监控目的的高成本问题,具有良好的经济性,应用效果非常显著。(5) Since the present invention is an integrated device for early warning positioning and tracking and warning, it has simple structure, convenient installation and operation, especially solves the high cost problem of completing the monitoring purpose by combining multiple monitoring equipment, and has good economy and application effect very significant.
附图说明Description of drawings
图1是本发明多方向监控区域预警定位自动跟踪监控装置的一实施例原理示意图。Fig. 1 is a principle schematic diagram of an embodiment of the multi-directional monitoring area early warning positioning automatic tracking monitoring device of the present invention.
图2是图1多方向监控区域预警定位自动跟踪监控装置实施例的立体图。Fig. 2 is a perspective view of an embodiment of the multi-directional monitoring area early warning and positioning automatic tracking and monitoring device in Fig. 1 .
图3是图1多方向监控区域预警定位自动跟踪监控装置实施例的预警定位机构立体图。Fig. 3 is a perspective view of the early warning and positioning mechanism of the embodiment of the automatic tracking and monitoring device for early warning and positioning in the multi-directional monitoring area of Fig. 1 .
图4是图1多方向监控区域预警定位自动跟踪监控装置实施例的水平滑动部件结构图。Fig. 4 is a structural diagram of the horizontal sliding part of the embodiment of the automatic tracking and monitoring device for early warning and positioning in the multi-directional monitoring area of Fig. 1 .
图5是图1多方向监控区域预警定位自动跟踪监控装置实施例的滑动护罩结构图。Fig. 5 is a structural diagram of the sliding shield of the embodiment of the multi-directional monitoring area early warning positioning automatic tracking monitoring device in Fig. 1 .
图6是图1多方向监控区域预警定位自动跟踪监控装置实施例的垂直调节部件结构图。Fig. 6 is a structural diagram of the vertical adjustment component of the embodiment of the multi-directional monitoring area early warning positioning automatic tracking monitoring device in Fig. 1 .
图7是图1多方向监控区域预警定位自动跟踪监控装置实施例的跟踪示警机构立体图。Fig. 7 is a perspective view of the tracking and warning mechanism of the embodiment of the automatic tracking and monitoring device for early warning and positioning in the multi-directional monitoring area of Fig. 1 .
图8是图1多方向监控区域预警定位自动跟踪监控装置实施例的水平、垂直旋转机构图。Fig. 8 is a horizontal and vertical rotation mechanism diagram of the embodiment of the multi-directional monitoring area early warning positioning automatic tracking monitoring device in Fig. 1 .
图9是图1多方向监控区域预警定位自动跟踪监控装置实施例的详细框图。Fig. 9 is a detailed block diagram of an embodiment of the automatic tracking and monitoring device for early warning and positioning in the multi-directional monitoring area of Fig. 1 .
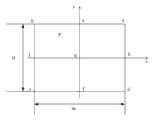
图10是合成后的全景视频数字信号的构成例示意图。FIG. 10 is a schematic diagram of a configuration example of a combined panoramic video digital signal.
图11是动态检测单元实现流程图。Figure 11 is a flow chart of the implementation of the dynamic detection unit.
图12是图像智能算法分析流程图。Fig. 12 is a flow chart of image intelligence algorithm analysis.
图13是广角镜头的投影示意图。Fig. 13 is a schematic diagram of the projection of the wide-angle lens.
图14是广角摄像机的投影模型示意图。Fig. 14 is a schematic diagram of a projection model of a wide-angle camera.
图15是摄像机投影模型(a)示意图。Fig. 15 is a schematic diagram of camera projection model (a).
图16是摄像机投影模型(b)示意图。Fig. 16 is a schematic diagram of camera projection model (b).
图17是图1多方向监控区域预警定位自动跟踪监控装置的一变形实施例示意图。Fig. 17 is a schematic diagram of a modified embodiment of the multi-directional monitoring area early warning positioning automatic tracking monitoring device in Fig. 1 .
图18是图9多方向监控区域预警定位自动跟踪监控装置的一变形实施例详细框图。Fig. 18 is a detailed block diagram of a modified embodiment of the multi-directional monitoring area early warning positioning automatic tracking monitoring device in Fig. 9 .
图19是图18多方向监控区域预警定位自动跟踪监控装置的一变形实施例详细框图。Fig. 19 is a detailed block diagram of a modified embodiment of the multi-directional monitoring area early warning positioning automatic tracking monitoring device in Fig. 18 .
图20是图1多方向监控区域预警定位自动跟踪监控装置的另一变形实施例示意图。Fig. 20 is a schematic diagram of another modified embodiment of the early warning, positioning and automatic tracking monitoring device for the multi-directional monitoring area in Fig. 1 .
图21是图1多方向监控区域预警定位自动跟踪监控装置的另一变形实施例示意图。Fig. 21 is a schematic diagram of another modified embodiment of the multi-directional monitoring area early warning positioning automatic tracking monitoring device in Fig. 1 .
图22是图21多方向监控区域预警定位自动跟踪监控装置实施例的框图。Fig. 22 is a block diagram of an embodiment of the multi-directional monitoring area early warning and positioning automatic tracking and monitoring device in Fig. 21.
图23是图1多方向监控区域预警定位自动跟踪监控装置的另一变形实施例示意图。Fig. 23 is a schematic diagram of another modified embodiment of the early warning, positioning and automatic tracking and monitoring device for the multi-directional monitoring area in Fig. 1 .
图24是图1多方向监控区域预警定位自动跟踪监控装置的另一变形实施例示意图。Fig. 24 is a schematic diagram of another modified embodiment of the multi-directional monitoring area early warning and positioning automatic tracking and monitoring device in Fig. 1 .
图25是图9多方向监控区域预警定位自动跟踪监控装置的另一变形实施例详细框图。Fig. 25 is a detailed block diagram of another modified embodiment of the multi-directional monitoring area early warning positioning automatic tracking monitoring device in Fig. 9 .
图中:1支架;2预警定位机构;3跟踪示警机构;201控制箱;202视窗;203垂直预警摄像机;204滑动护罩;205连接轴;206下支撑板;207滑槽;208上支撑板;209滑轨;210滑动护罩定位孔;211摄像机支架安装板;212水平预警摄像机;213弧形孔;214定位孔;215滑动轴;216转动轴;217摄像机支架;218水平预警部分;219垂直预警部分;301跟踪摄像机;302驱动机箱;303声音示警装置;304光照示警装置;305垂直旋转电机;306同步带机构a;307同步带机构b;308水平旋转电机;4球型云台摄像机。In the figure: 1 bracket; 2 early warning positioning mechanism; 3 tracking warning mechanism; 201 control box; 202 window; 203 vertical early warning camera; 204 sliding shield; 205 connecting shaft; ; Vertical early warning part; 301 tracking camera; 302 drive chassis; 303 sound warning device; 304 light warning device; 305 vertical rotation motor; 306 timing belt mechanism a; 307 timing belt mechanism b; 308 horizontal rotation motor; .
具体实施方式Detailed ways
为了使本发明的目的、技术方案及优点更加清楚,以下结合附图和实施例对依据本发明提供的具体实施方式、结构、特征详述如下:In order to make the purpose, technical solutions and advantages of the present invention clearer, the specific implementation, structure and features provided according to the present invention are described in detail below in conjunction with the accompanying drawings and embodiments:
如图1所示,为多方向监控区域预警定位自动跟踪监控装置的一实施例原理示意图,(常规状态安装时)图中跟踪示警机构3安放在整个监控装置的上方,跟踪示警机构3下方依次为水平预警部分218和垂直预警部分219,水平预警部分218内安放了两个采用长焦摄像机的水平预警摄像机212(图6所示),两个水平预警摄像机212的夹角可进行调节(具体调节操作下文说明),通过两水平预警摄像机夹角的调节可改变水平预警监控区域的方向。As shown in Figure 1, it is a schematic diagram of the principle of an embodiment of the multi-directional monitoring area early warning positioning automatic tracking monitoring device. (During normal state installation) the
垂直预警部分219安放一个采用广角摄像机的垂直预警摄像机203,图1中圆形区域为垂直预警部分219内垂直预警摄像机203的监控区域,由于垂直预警摄像机203采用广角摄像机,因此视频图像周边会产生扭曲和畸变现象,导致监控区域的有效范围较小,两侧三角形区域为水平预警部分218内水平预警摄像机212的监控区域,本监控装置采用垂直预警部分219和水平预警部分218的组合视频监控方式,扩大了垂直预警部分219内垂直预警摄像机203视频监控区域的有效范围,并且水平预警部分218与垂直预警部分219的视频监控区域有重合,因此在合成两部分视频图像后,可弥补垂直预警部分219内垂直预警摄像机203视频图像周边扭曲和畸变对监控范围造成的影响。Vertical
综上所述,相比专利申请公布号为CN102342099A的智能监控装置只包含采用如云台摄像机的集中视频采集装置和采用如广角摄像机的广域视频采集装置,本发明的监控装置不仅扩大了视频监控区域,而且弥补了广角摄像机视频图像周边扭曲和畸变对监控范围造成的影响,尤其实现了多方向监控区域的可调。In summary, compared to the patent application publication number being that the intelligent monitoring device of CN102342099A only includes a centralized video acquisition device such as a pan-tilt camera and a wide-area video acquisition device such as a wide-angle camera, the monitoring device of the present invention not only expands the video It not only compensates for the influence of distortion and distortion around the wide-angle camera video image on the monitoring range, but also realizes the adjustment of the multi-directional monitoring area.
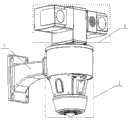
如图2所示,表示图1多方向监控区域预警定位自动跟踪监控装置的实施例立体图,包括支架1、预警定位机构2和跟踪示警机构3,其中跟踪示警机构3安放在预警定位机构2的上方,支架1为侧装。As shown in Figure 2, it represents the perspective view of an embodiment of the early warning and positioning automatic tracking and monitoring device in the multi-directional monitoring area of Figure 1, including a
如图3~6所示,表示图1多方向监控区域预警定位自动跟踪监控装置实施例的预警定位机构。本监控装置预警定位机构包括垂直预警部分219和水平预警部分218。As shown in Figures 3 to 6, it shows the early warning and positioning mechanism of the embodiment of the multi-directional monitoring area early warning and positioning automatic tracking and monitoring device in Figure 1 . The early warning positioning mechanism of the monitoring device includes a vertical
所述垂直预警部分219包括垂直预警摄像机203和辅助照明部件(图中未标出),垂直预警部分219安放在整个监控装置的下方,垂直预警摄像机203的镜头垂直指向下方,辅助照明部件固定安置在垂直预警摄像机的镜头周围。The
所述水平预警部分218包括水平预警摄像机212、水平滑动部件、垂直调节部件和辅助照明部件;所述水平预警摄像机212采用长焦摄像机或/和变焦摄像机一个以上;即水平预警摄像机212采用长焦镜头/变焦镜头和模拟摄像机/数字摄像机的组合,采用数量为一组以上。The horizontal
水平预警摄像机212放置在滑动护罩204内并位于视窗202的后面,水平滑动部件由上下两端设有滑轨209的滑动护罩204和与滑动护罩204接触表面上设有滑槽207的上支撑板208和下支撑板206构成,上支撑板208和下支撑板206固定在连接轴205上,连接轴205位于整个监控装置的垂直轴心位置起支撑作用,因此通过滑轨209与滑槽207的滑动连接使滑动护罩204可以在上支撑板208和下支撑板206之间滑动,从而调节安放在滑动护罩204内水平预警摄像机212的水平转角,滑动护罩204调节完后通过螺钉在滑动护罩定位孔210上将滑动护罩204与下支撑板206固定连接。The horizontal early warning camera 212 is placed in the sliding
其中垂直调节部件由设有转动轴216和滑动轴215的摄像机支架217与设有定位孔214和弧形孔213的摄像机支架安装板211构成,其中摄像机支架217两侧分别对称设有两个转动轴216和两个滑动轴215,摄像机支架安装板211两侧对应设有与摄像机支架相配合的两个定位孔214和两个弧形孔213,摄像机支架217一端的两个转动轴216放置在摄像机支架安装板211对应端两侧的两个定位孔214上转动连接,摄像机支架217另一端的两个滑动轴215与摄像机支架安装板211对应端的两个弧形孔213间隙配合,目的使摄像机支架217在摄像机支架安装板211上可绕定位孔214旋转,从而调节安装在摄像机支架217上水平预警摄像机212的垂直转角。辅助照明部件(图中未标示)安放在水平预警摄像机212镜头周围,电路元件放置在控制箱201中。Wherein the vertical adjustment part is formed by the camera bracket 217 provided with the rotating shaft 216 and the sliding shaft 215 and the camera bracket mounting plate 211 provided with the positioning hole 214 and the arc hole 213, wherein the two sides of the camera bracket 217 are respectively symmetrically provided with two rotating shafts. Shaft 216 and two sliding shafts 215, two positioning holes 214 and two arc-shaped holes 213 matched with the camera bracket are correspondingly provided on both sides of the camera bracket mounting plate 211, and the two rotating shafts 216 at one end of the camera bracket 217 are placed on The two positioning holes 214 on both sides of the corresponding end of the camera bracket mounting plate 211 are rotated and connected, and the two sliding shafts 215 at the other end of the camera bracket 217 are in clearance fit with the two arc-shaped holes 213 at the corresponding end of the camera bracket mounting plate 211. The bracket 217 can rotate around the positioning hole 214 on the camera bracket mounting plate 211, thereby adjusting the vertical angle of the horizontal warning camera 212 installed on the camera bracket 217. Auxiliary lighting components (not shown in the figure) are placed around the lens of the horizontal early warning camera 212, and circuit elements are placed in the
所述垂直预警部分219和水平预警部分218中的辅助照明部件内设的辅助照明单元均可采用红外灯、激光器、可见光照明设备其中之一或两种以上的组合;即可分别安放在水平预警摄像机镜头周围和垂直预警摄像机镜头周围。The auxiliary lighting units built in the auxiliary lighting components in the
如图7、图8所示,表示图1多方向监控区域预警定位自动跟踪监控装置实施例的跟踪示警机构;所述跟踪示警机构包括跟踪视频采集部分和示警部分:As shown in Figure 7 and Figure 8, it represents the tracking and warning mechanism of the embodiment of the multi-directional monitoring area early warning and positioning automatic tracking and monitoring device in Figure 1; the tracking and warning mechanism includes a tracking video acquisition part and a warning part:
所述跟踪视频采集部分由跟踪摄像机301、水平旋转机构和垂直旋转机构组成,其中跟踪摄像机301固定放置在驱动机箱302一侧,水平旋转机构由水平旋转电机308和同步带机构b307组成,垂直旋转机构由垂直旋转电机305和同步带机构a306组成,水平旋转机构和垂直旋转机构放置在驱动机箱302内;The tracking video acquisition part is made up of a tracking camera 301, a horizontal rotation mechanism and a vertical rotation mechanism, wherein the tracking camera 301 is fixedly placed on one side of the drive chassis 302, and the horizontal rotation mechanism is composed of a
所述示警部分由音频采集器、报警器和示警灯(图中未标示)组成。音频采集器和报警器放置在声音示警装置303内,示警灯放置在光照示警装置304内,声音示警装置和光照示警装置固定安装在驱动机箱302另一侧。The warning part is composed of an audio collector, an alarm and a warning light (not marked in the figure). The audio collector and alarm are placed in the sound warning device 303 , the warning light is placed in the light warning device 304 , and the sound warning device and the light warning device are fixedly installed on the other side of the drive case 302 .
跟踪视频采集部分和示警部分通过水平旋转机构和垂直旋转机构进行水平/垂直转动,从而对运动目标进行跟踪监控和示警警告。The tracking video acquisition part and the warning part are rotated horizontally/vertically through the horizontal rotation mechanism and the vertical rotation mechanism, so as to track, monitor and warn the moving target.
如图9所示,表示图1多方向监控区域预警定位自动跟踪监控装置实施例的详细框图。垂直预警视频采集单元由广角镜头和模拟摄像机组成。广角镜头作为以透镜或反射镜的组合构成的光学结构体,对本发明所述监控装置正下方的监控区域内射入的光进行集光而成像于模拟摄像机的图像传感器上。模拟摄像机将广角镜头集光的光转换成电信号并最终以模拟复合视频信号格式传输至第一视频转换单元。As shown in FIG. 9 , it shows a detailed block diagram of an embodiment of the multi-directional monitoring area early warning positioning automatic tracking monitoring device in FIG. 1 . The vertical warning video acquisition unit consists of a wide-angle lens and an analog camera. The wide-angle lens is an optical structure composed of a combination of lenses or mirrors, which collects the light incident in the monitoring area directly below the monitoring device of the present invention and forms an image on the image sensor of the analog camera. The analog camera converts the light collected by the wide-angle lens into an electrical signal and finally transmits it to the first video conversion unit in an analog composite video signal format.
水平预警视频采集单元由长焦镜头和模拟摄像机组成。长焦镜头作为以透镜或反射镜的组合构成的光学结构体,对本发明所述监控装置某一侧向的监控区域内射入的光进行集光而成像于模拟摄像机的图像传感器上。模拟摄像机将长焦镜头集光的光转换成电信号并最终以模拟复合视频信号格式传输至第一视频转换单元。水平预警部分可以包含一个或多个水平预警视频采集单元,本实施例中包含两个水平预警视频采集单元。The horizontal early warning video acquisition unit consists of a telephoto lens and an analog camera. As an optical structure composed of a combination of lenses or mirrors, the telephoto lens collects the light incident in a certain side monitoring area of the monitoring device of the present invention and forms an image on the image sensor of the analog camera. The analog camera converts the light collected by the telephoto lens into an electrical signal and finally transmits it to the first video conversion unit in an analog composite video signal format. The horizontal early warning part may include one or more horizontal early warning video collection units, and this embodiment includes two horizontal early warning video collection units.
由于广角摄像机拍摄范围广、拍摄画面周围扭曲变形的特点,使得垂直预警视频具备覆盖面积大、可有效监控距离近的特点。由于长焦摄像机拍摄范围窄、拍摄距离远的特点,使得水平预警视频具备拍摄面积小、可有效监控距离远的特点。通过垂直预警视频采集单元与水平预警视频采集单元配合,即选择焦距合适的广角镜头和长焦镜头并配合调整水平预警部分的拍摄角度,可以使水平预警视频覆盖垂直预警视频中扭曲变形的边缘及边缘以外的部分,获得更远距离的预警视频图像,大大提高了监控装置的有效监控距离。而且,配合多个水平拍摄角度不同的水平预警视频采集单元,可以使监控装置对其周边360°范围内进行无死角的视频监控。Due to the wide-angle shooting range of the wide-angle camera and the characteristics of distortion and deformation around the shooting screen, the vertical warning video has the characteristics of large coverage area and short effective monitoring distance. Due to the narrow shooting range and long shooting distance of the telephoto camera, the horizontal early warning video has the characteristics of small shooting area and long effective monitoring distance. By cooperating with the vertical warning video acquisition unit and the horizontal warning video acquisition unit, that is, selecting a wide-angle lens and a telephoto lens with a suitable focal length and adjusting the shooting angle of the horizontal warning part, the horizontal warning video can cover the distorted edges and edges of the vertical warning video For the parts other than the early warning video image at a longer distance, the effective monitoring distance of the monitoring device is greatly improved. Moreover, with a plurality of horizontal early warning video acquisition units with different horizontal shooting angles, the monitoring device can perform video monitoring without dead angles within a 360° range around it.
跟踪视频采集单元由变焦镜头和模拟摄像机组成。变焦镜头作为以透镜或反射镜的组合构成的光学结构体,对运动目标所在监控区域内射入的光进行集光而成像于模拟摄像机的图像传感器上。模拟摄像机将变焦镜头集光的光转换成电信号并最终以模拟复合视频信号格式传输至第一视频转换单元。The tracking video acquisition unit consists of a zoom lens and an analog camera. As an optical structure composed of a combination of lenses or mirrors, the zoom lens collects the light incident in the monitoring area where the moving target is located and forms an image on the image sensor of the analog camera. The analog camera converts the light collected by the zoom lens into an electrical signal and finally transmits it to the first video conversion unit in an analog composite video signal format.
光照强度检测单元采用光照强度传感器。光照强度传感器实时检测监控区域的光照强度,并将对光照强度的检测值传输至第一控制单元。The light intensity detection unit adopts a light intensity sensor. The light intensity sensor detects the light intensity of the monitoring area in real time, and transmits the detected value of the light intensity to the first control unit.
辅助照明单元采用红外LED模组。红外LED模组在第一控制单元的控制下开启,开启后对监控区域进行红外光辅助照明。在其他实施例中,辅助照明单元也可采用例如可见光LED模组、激光器等辅助照明单元,选择其一或他们的组合。The auxiliary lighting unit uses infrared LED modules. The infrared LED module is turned on under the control of the first control unit, and after turning on, the infrared light auxiliary lighting is performed on the monitoring area. In other embodiments, the auxiliary lighting unit can also use auxiliary lighting units such as visible light LED modules, lasers, etc., one of them or a combination thereof can be selected.
第一视频转换单元采用模数视频解码器。模数视频解码器接收垂直预警视频采集单元和水平预警视频采集单元输出的垂直预警视频模拟信号和水平预警视频模拟信号,并将上述垂直预警视频模拟信号和水平预警视频模拟信号数字化后传输至动态检测单元(下文简称经数字化后的垂直预警视频模拟信号和水平预警视频模拟信号为“数字垂直预警视频”和“数字水平预警视频”)。同时,模数视频解码器还将上述数字垂直预警视频和数字水平预警视频传输至视频合成单元。同时,模数视频解码器还将上述数字垂直预警视频和数字水平预警视频传输至视频存储单元。而且,模数视频解码器还接收跟踪视频采集单元输出的跟踪视频模拟信号,并将上述跟踪视频模拟信号数字化后传输至视频合成单元(下文简称经数字化后的跟踪视频模拟信号为“数字跟踪视频”)。同时,模数视频解码器还将上述数字跟踪视频传输至视频存储单元。The first video converting unit employs an analog-to-digital video decoder. The analog-to-digital video decoder receives the vertical early warning video analog signal and the horizontal early warning video analog signal output by the vertical early warning video acquisition unit and the horizontal early warning video acquisition unit, and digitizes the above vertical early warning video analog signal and horizontal early warning video analog signal and transmits them to the dynamic Detection unit (hereinafter referred to as "digital vertical early warning video" and "digital horizontal early warning video" after digitized vertical early warning video analog signal and horizontal early warning video analog signal). At the same time, the analog-to-digital video decoder also transmits the above-mentioned digital vertical warning video and digital horizontal warning video to the video synthesis unit. At the same time, the analog-to-digital video decoder also transmits the above-mentioned digital vertical warning video and digital horizontal warning video to the video storage unit. Moreover, the analog-to-digital video decoder also receives the tracking video analog signal output by the tracking video acquisition unit, and transmits the tracking video analog signal to the video synthesis unit after digitizing the tracking video analog signal (hereinafter referred to as the "digital tracking video signal") "). At the same time, the analog-to-digital video decoder also transmits the above-mentioned digital tracking video to the video storage unit.
视频存储单元具备如SD卡或硬盘的存储介质。SD卡接收并存储第一视频转换单元输出的数字垂直预警视频、数字水平预警视频和数字跟踪视频。而且,在第一控制单元的控制下,SD卡也可以将其内部存储的上述数字垂直预警视频、数字水平预警视频和数字跟踪视频传输至视频合成单元。视频存储单元也能够存储压缩的数字视频信号代替原始的数字视频信号。在这种实施例中,视频存储单元附加具备用于压缩原始数字视频信号和解压缩数字视频信号的压缩/解压缩单元。The video storage unit has a storage medium such as an SD card or a hard disk. The SD card receives and stores the digital vertical warning video, the digital horizontal warning video and the digital tracking video output by the first video converting unit. Moreover, under the control of the first control unit, the SD card can also transmit the above-mentioned digital vertical warning video, digital horizontal warning video and digital tracking video stored in it to the video synthesis unit. The video storage unit is also capable of storing compressed digital video signals instead of raw digital video signals. In such an embodiment, the video storage unit is additionally provided with a compression/decompression unit for compressing the original digital video signal and decompressing the digital video signal.
动态检测单元采用数字信号处理器。动态检测单元、视频合成单元和第一控制单元可由同一数字信号处理器实现,也可分别由各自独立的数字信号处理器实现。数字信号处理器以帧为单位分别检测数字垂直预警视频图像和数字水平预警视频图像中的动态,当检测到多个运动目标时,根据运动目标的大小、速度和出现的先后顺序(可考虑大小、速度和出现先后顺序因素之一,或综合考虑其全部因素),对所有运动目标进行优先级排序,在仅有一个跟踪示警模块的前提下,确定优先级最高的运动目标并计算出该运动目标的位置信息,数字信号处理器将运动目标的位置信息转换为对跟踪示警模块的控制指令,并将上述对跟踪示警模块的控制指令传输至第一控制单元。其后将详述动态检测算法。The dynamic detection unit adopts a digital signal processor. The motion detection unit, the video synthesis unit and the first control unit may be realized by the same digital signal processor, or may be realized by independent digital signal processors respectively. The digital signal processor detects the dynamics in the digital vertical early warning video image and digital horizontal early warning video image in units of frames. When multiple moving targets are detected, according to the size, speed and sequence of appearance of the moving targets (size , one of the factors of speed and order of appearance, or consider all the factors comprehensively), sort all the moving objects in priority order, and determine the moving object with the highest priority and calculate the moving object under the premise of only one tracking and warning module For the position information of the target, the digital signal processor converts the position information of the moving target into a control command for the tracking and warning module, and transmits the control command for the tracking and warning module to the first control unit. The dynamic detection algorithm will be described in detail later.
视频合成单元采用数字信号处理器。视频合成单元、动态检测单元和第一控制单元可由同一数字信号处理器实现,也可分别由各自独立的数字信号处理器实现。数字信号处理器从第一视频转换单元接收数字垂直预警视频、数字水平预警视频和数字跟踪视频,并在第一控制单元的控制下按照设定的构成方式将上述数字垂直预警视频、数字水平预警视频和数字跟踪视频合成为全景视频数字信号。当检测到运动目标时,数字信号处理器在第一控制单元的控制下在相应预警视频图像上叠加例如边框闪烁等报警信号。在第一控制单元的控制下,上述数字垂直预警视频、数字水平预警视频和数字跟踪视频可以是由第一视频转换单元提供的实时监控视频,也可以是由视频存储单元提供的以往监控视频的录像。当数字信号处理器从视频存储单元接收数字垂直预警视频、数字水平预警视频和数字跟踪视频时,第一控制单元控制数字信号处理器不再接收第一视频转换单元输出的数字垂直预警视频、数字水平预警视频和数字跟踪视频。此时数字信号处理器接收来自于视频存储单元的数字垂直预警视频、数字水平预警视频和数字跟踪视频为视频存储单元内存储的录像。The video synthesis unit adopts a digital signal processor. The video synthesis unit, the dynamic detection unit and the first control unit may be realized by the same digital signal processor, or may be realized by independent digital signal processors respectively. The digital signal processor receives the digital vertical early warning video, the digital horizontal early warning video and the digital tracking video from the first video conversion unit, and converts the above digital vertical early warning video, digital horizontal early warning video and digital horizontal early warning video according to the set composition mode under the control of the first control unit. The video and digital tracking video are synthesized into a panoramic video digital signal. When a moving target is detected, under the control of the first control unit, the digital signal processor superimposes an alarm signal such as a flickering border on the corresponding early warning video image. Under the control of the first control unit, the above-mentioned digital vertical early warning video, digital horizontal early warning video and digital tracking video can be the real-time monitoring video provided by the first video conversion unit, or the previous monitoring video provided by the video storage unit. video. When the digital signal processor receives digital vertical early warning video, digital horizontal early warning video and digital tracking video from the video storage unit, the first control unit controls the digital signal processor to no longer receive the digital vertical early warning video, digital digital signal processor output by the first video conversion unit. Horizontal warning video and digital tracking video. At this time, the digital signal processor receives the digital vertical warning video, the digital horizontal warning video and the digital tracking video from the video storage unit as the video stored in the video storage unit.
图10表示合成后的全景视频数字信号的构成例。视频合成单元将视频画面分割为四个显示区间,每个显示区间分别以数字垂直预警视频、数字水平预警视频和数字跟踪视频中的一路数字视频信号填充。操作人员通过主控设备发送控制指令来改变全景视频数字信号的组成结构。例如,如果操作人员在显示设备上的全景视频中选择放大跟踪视频,则主控设备发送相应的控制指令,第一控制单元控制视频合成单元在全景视频数字信号中只包含数字跟踪视频,并使其占满全部四个显示区间。同样地,如果操作人员在显示设备上的全景视频中选择关闭跟踪视频,则主控设备发送相应的控制指令,第一控制单元控制视频合成单元在全景视频数字信号中不包含数字跟踪视频,原先用于填充数字跟踪视频的区间被预设画面替代。FIG. 10 shows an example of the structure of a combined panoramic video digital signal. The video synthesis unit divides the video picture into four display intervals, and each display interval is filled with one digital video signal from the digital vertical warning video, the digital horizontal warning video and the digital tracking video respectively. The operator sends control instructions through the main control device to change the composition structure of the panoramic video digital signal. For example, if the operator chooses to enlarge the tracking video in the panoramic video on the display device, the master control device sends a corresponding control command, and the first control unit controls the video synthesis unit to only include the digital tracking video in the panoramic video digital signal, and make It occupies all four display intervals. Similarly, if the operator chooses to close the tracking video in the panoramic video on the display device, the main control device sends a corresponding control command, and the first control unit controls the video synthesis unit to not include the digital tracking video in the panoramic video digital signal. The intervals used to fill digital tracking video are replaced by preset frames.
第二视频转换单元采用数字视频编码器。数字视频编码器接收视频合成单元输出的全景视频数字信号,并将上述全景视频数字信号转换为模拟复合视频信号传输至显示设备。The second video converting unit employs a digital video encoder. The digital video encoder receives the panoramic video digital signal output by the video synthesis unit, converts the panoramic video digital signal into an analog composite video signal and transmits it to the display device.
第一通讯单元采用串行通讯编解码器。串行通讯编解码器与主控设备或第一控制单元间的连接能够根据RS232、RS485或RS422标准形成。串行通讯编解码器接收主控设备发出的符合串行通讯标准的控制指令(下文简称符合串行通讯标准的控制指令为“串行控制指令”),并将上述串行控制指令解码后传输至第一控制单元。上述串行控制指令一种是针对预警定位模块的控制指令,另一种是针对跟踪示警模块的控制指令。在第一种情况下,第一控制单元将控制指令转换为控制信号,控制例如视频存储单元、视频合成单元等功能单元。在第二种情况下,第一控制单元将控制指令中继传输至跟踪示警模块。而且,串行通讯编解码器还接收第一控制单元发出的状态信息,并将上述状态信息编码为符合串行通讯标准的状态信息后传输至主控设备(下文简称符合串行通讯标准的状态信息为“串行状态信息”)。上述状态信息一种是预警定位模块的状态信息,另一种是由第一控制单元中继传输的跟踪示警模块的状态信息。当检测到运动目标时,串行通讯编解码器还接收第一控制单元发出的报警指令,并将上述报警指令编码为符合串行通讯标准的报警指令后传输至主控设备(下文简称符合串行通讯标准的报警指令为“串行报警指令”)。The first communication unit adopts a serial communication codec. The connection between the serial communication codec and the master control device or the first control unit can be formed according to the RS232, RS485 or RS422 standard. The serial communication codec receives the control command issued by the main control device that conforms to the serial communication standard (hereinafter referred to as the "serial control command" that conforms to the serial communication standard), and decodes the above serial control command and transmits it. to the first control unit. One of the above serial control commands is a control command for the early warning positioning module, and the other is a control command for the tracking and warning module. In the first case, the first control unit converts the control command into a control signal to control functional units such as a video storage unit, a video synthesis unit and the like. In the second case, the first control unit relays the control instruction to the tracking and warning module. Moreover, the serial communication codec also receives the state information sent by the first control unit, encodes the above state information into state information conforming to the serial communication standard, and then transmits it to the main control device (hereinafter referred to as the state conforming to the serial communication standard). The information is "Serial Status Information"). One of the above state information is the state information of the early warning and positioning module, and the other is the state information of the tracking and warning module relayed and transmitted by the first control unit. When a moving target is detected, the serial communication codec also receives the alarm command sent by the first control unit, and encodes the above alarm command into an alarm command conforming to the serial communication standard and then transmits it to the main control device (hereinafter referred to as conforming to the serial communication standard). The alarm command of the communication standard is "serial alarm command").
第一控制单元采用数字信号处理器。第一控制单元、视频合成单元和动态检测单元可由同一数字信号处理器实现,也可分别由各自独立的数字信号处理器实现。数字信号处理器接收动态检测单元产生的对跟踪示警模块的控制指令,并通过第二通讯单元将上述对跟踪示警模块的控制指令传输至跟踪示警模块,同时,数字信号处理器还通过第二通讯单元从跟踪示警模块接收状态信息。数字信号处理器还从光照强度检测单元接收对监控区域光照强度的检测值,当上述检测值低于设定值时,数字信号处理器控制开启辅助照明单元对监控区域进行辅助照明。数字信号处理器还控制视频合成单元从第一视频转换单元或从视频存储单元接收数字垂直预警视频、数字水平预警视频和数字跟踪视频,数字信号处理器还控制视频合成单元按照设定的构成方式将上述数字垂直预警视频、数字水平预警视频和数字跟踪视频合成为全景视频数字信号。当检测到运动目标时,数字信号处理器还控制视频合成单元在相应预警视频图像上叠加例如边框闪烁等报警信号。数字信号处理器还控制视频存储单元可以将其内部存储的数字垂直预警视频、数字水平预警视频和数字跟踪视频传输至视频合成单元,此时数字信号处理器控制视频合成单元不再接收第一视频转换单元输出的数字垂直预警视频、数字水平预警视频和数字跟踪视频。数字信号处理器还通过第一通讯单元接收主控设备发送的控制指令,同时,数字信号处理器还通过第一通讯单元向主控设备发送状态信息。当检测到运动目标时,数字信号处理器还通过第一通讯单元向主控设备发送报警指令,用于触发主控设备的报警动作。The first control unit employs a digital signal processor. The first control unit, the video synthesis unit and the motion detection unit may be realized by the same digital signal processor, or may be realized by independent digital signal processors respectively. The digital signal processor receives the control command for the tracking warning module generated by the dynamic detection unit, and transmits the above-mentioned control command for the tracking warning module to the tracking warning module through the second communication unit. At the same time, the digital signal processor also passes the second communication unit. The unit receives status information from the tracking alert module. The digital signal processor also receives the detection value of the light intensity in the monitoring area from the light intensity detection unit. When the detection value is lower than the set value, the digital signal processor controls to turn on the auxiliary lighting unit to provide auxiliary lighting for the monitoring area. The digital signal processor also controls the video synthesis unit to receive the digital vertical warning video, the digital horizontal warning video and the digital tracking video from the first video conversion unit or from the video storage unit, and the digital signal processor also controls the video synthesis unit according to the set composition mode The above-mentioned digital vertical early warning video, digital horizontal early warning video and digital tracking video are synthesized into a panoramic video digital signal. When a moving target is detected, the digital signal processor also controls the video synthesis unit to superimpose alarm signals such as flickering borders on the corresponding warning video image. The digital signal processor also controls the video storage unit to transmit the digital vertical warning video, digital horizontal warning video and digital tracking video stored in it to the video synthesis unit. At this time, the digital signal processor controls the video synthesis unit to no longer receive the first video The digital vertical warning video, the digital horizontal warning video and the digital tracking video output by the converting unit. The digital signal processor also receives the control instruction sent by the main control device through the first communication unit, and at the same time, the digital signal processor also sends status information to the main control device through the first communication unit. When a moving target is detected, the digital signal processor also sends an alarm command to the main control device through the first communication unit, so as to trigger an alarm action of the main control device.
第二通讯单元采用串行通讯编解码器。串行通讯编解码器与第一控制单元和跟踪示警模块中的第三通讯单元间的连接能够根据RS232、RS485或RS422标准形成。串行通讯编解码器接收预警定位模块中第一控制单元发送的对跟踪示警模块的控制指令,并将上述控制指令编码为串行控制指令后传输至跟踪示警模块中的第三通讯单元。上述对跟踪示警模块的控制指令可以是第一控制单元发送的由动态检测单元对运动目标的位置检测而产生的控制指令,也可以是第一控制单元中继传输的来自于主控设备的控制指令,且控制指令后者的优先级高于前者。而且,串行通讯编解码器还接收跟踪示警模块中的第三通讯单元发送的跟踪示警模块的串行状态信息,并将上述串行状态信息解码为状态信息后传输至第一控制单元。The second communication unit adopts a serial communication codec. The connection between the serial communication codec and the first control unit and the third communication unit in the tracking and warning module can be formed according to RS232, RS485 or RS422 standard. The serial communication codec receives the control command to the tracking and warning module sent by the first control unit in the early warning positioning module, and encodes the control command into a serial control command and transmits it to the third communication unit in the tracking and warning module. The above-mentioned control instruction for the tracking warning module may be a control instruction sent by the first control unit and generated by the dynamic detection unit for detecting the position of the moving object, or it may be a control instruction from the main control device relayed by the first control unit instruction, and the priority of the latter control instruction is higher than that of the former. Moreover, the serial communication codec also receives the serial status information of the tracking and warning module sent by the third communication unit in the tracking and warning module, and decodes the serial status information into status information and transmits it to the first control unit.
第三通讯单元采用串行通讯编解码器。串行通讯编解码器与第二控制单元和预警定位模块中的第二通讯单元间的连接能够根据RS232、RS485或RS422标准形成。串行通讯编解码器接收预警定位模块中的第二通讯单元发送的对跟踪示警模块的串行控制指令,并将上述串行控制指令解码为控制指令后传输至跟踪示警模块中的第二控制单元。而且,串行通讯编解码器还接收第二控制单元传输的跟踪示警模块的状态信息,并将上述状态信息编码为串行状态信息后传输至预警定位模块中的第二通讯单元。The third communication unit adopts a serial communication codec. The connection between the serial communication codec and the second control unit and the second communication unit in the early warning positioning module can be formed according to RS232, RS485 or RS422 standards. The serial communication codec receives the serial control command to the tracking warning module sent by the second communication unit in the early warning positioning module, and decodes the above serial control command into a control command and transmits it to the second control command in the tracking warning module. unit. Moreover, the serial communication codec also receives the status information of the tracking and warning module transmitted by the second control unit, encodes the above status information into serial status information and transmits it to the second communication unit in the early warning and positioning module.
第二控制单元采用微控制处理器。微控制处理器通过第三通讯单元接收来自预警定位模块的对跟踪示警模块的控制指令,并根据上述对跟踪示警模块的控制指令产生对水平旋转电机驱动单元、垂直旋转电机驱动单元和镜头变焦电机驱动单元的控制信号。同时,微控制处理器还通过第三通讯单元向预警定位模块发送状态信息。微控制处理器还控制光照示警单元对运动目标所在区域进行光照示警。微控制处理器还控制声音示警单元对运动目标所在区域进行声音示警,微控制处理器选择示警声音的来源。微控制处理器还控制音频采集单元对运动目标所在区域进行音频采集。The second control unit adopts a microcontroller processor. The micro-control processor receives the control command to the tracking warning module from the early warning and positioning module through the third communication unit, and generates the horizontal rotation motor drive unit, the vertical rotation motor drive unit and the lens zoom motor according to the above-mentioned control command to the tracking warning module. Control signal for the drive unit. At the same time, the microcontroller processor also sends status information to the early warning and positioning module through the third communication unit. The microcontroller processor also controls the light warning unit to give light warning to the area where the moving target is located. The micro-control processor also controls the sound warning unit to give sound warning to the area where the moving target is located, and the micro-control processor selects the source of the warning sound. The microcontroller processor also controls the audio collection unit to collect audio from the area where the moving target is located.
水平旋转电机驱动单元可采用步进电机驱动器。步进电机驱动器接收第二控制单元的控制信号,并将上述控制信号转换为对水平旋转电机的驱动信号,驱动水平旋转电机旋转。The horizontal rotation motor drive unit can adopt a stepper motor driver. The stepper motor driver receives the control signal from the second control unit, and converts the above control signal into a drive signal for the horizontal rotation motor to drive the horizontal rotation motor to rotate.
水平旋转电机可采用步进电机。步进电机接收水平旋转电机驱动单元的驱动信号,在驱动信号的控制下旋转并带动跟踪示警机构在水平方向上旋转,最终使跟踪示警机构在水平方向上朝向运动目标所在区域。The horizontal rotation motor can adopt a stepper motor. The stepping motor receives the driving signal of the horizontal rotation motor drive unit, rotates under the control of the driving signal and drives the tracking and warning mechanism to rotate in the horizontal direction, and finally makes the tracking and warning mechanism face the area where the moving target is located in the horizontal direction.
垂直旋转电机驱动单元可采用步进电机驱动器。步进电机驱动器接收第二控制单元的控制信号,并将上述控制信号转换为对垂直旋转电机的驱动信号,驱动垂直旋转电机旋转。The vertical rotation motor drive unit can adopt a stepper motor driver. The stepper motor driver receives the control signal from the second control unit, and converts the above control signal into a drive signal for the vertical rotation motor to drive the vertical rotation motor to rotate.
垂直旋转电机采用步进电机。步进电机接收垂直旋转电机驱动单元的驱动信号,在驱动信号的控制下旋转并带动跟踪示警机构在垂直方向上旋转,最终使跟踪示警机构在垂直方向上朝向运动目标所在区域。The vertical rotation motor adopts a stepper motor. The stepper motor receives the drive signal from the vertical rotation motor drive unit, rotates under the control of the drive signal and drives the tracking warning mechanism to rotate in the vertical direction, and finally makes the tracking warning mechanism face the area where the moving target is located in the vertical direction.
镜头变焦电机驱动单元可采用步进电机驱动器。步进电机驱动器接收第二控制单元的控制信号,并将上述控制信号转换为对镜头变焦电机的驱动信号,驱动镜头变焦电机旋转。The lens zoom motor driving unit can adopt a stepping motor driver. The stepping motor driver receives the control signal from the second control unit, and converts the control signal into a driving signal for the lens zoom motor to drive the lens zoom motor to rotate.
镜头变焦电机可采用微型步进电机。微型步进电机接收镜头变焦电机驱动单元的驱动信号,在驱动信号控制下旋转并带动变焦镜头镜组转动从而改变镜头焦距,最终使运动目标在跟踪视频上所占面积和图像清晰度达到最佳状态。The lens zoom motor can adopt a micro stepping motor. The micro stepping motor receives the driving signal of the lens zoom motor drive unit, rotates under the control of the driving signal and drives the zoom lens group to rotate to change the focal length of the lens, and finally makes the area occupied by the moving target on the tracking video and the image clarity reach the best state.
光照示警单元采用强光LED模组。强光LED模组在第二控制单元的控制下,对运动目标所在区域进行光照示警。The light warning unit adopts a strong light LED module. Under the control of the second control unit, the strong light LED module gives light warning to the area where the moving target is located.
声音示警单元采用模拟定向扬声器。模拟定向扬声器在第二控制单元的控制下,对运动目标所在区域进行声音示警。用于示警的声音可以来自于预先存储在定向扬声器内部的录音,也可以直接来自于主控设备现场采集的操作人员的语音喊话。The sound warning unit adopts the analog directional loudspeaker. Under the control of the second control unit, the simulated directional loudspeaker gives sound warning to the area where the moving target is located. The sound used for warning can come from the pre-stored recording inside the directional loudspeaker, or directly from the voice shout of the operator collected by the main control device on site.
音频采集单元采用模拟定向拾音器。模拟定向拾音器在第二控制单元的控制下,对运动目标所在区域进行模拟音频采集,并将所采集的模拟音频传输至主控设备。The audio capture unit uses analog directional pickups. Under the control of the second control unit, the analog directional pickup collects analog audio from the area where the moving target is located, and transmits the collected analog audio to the main control device.
如图11和图12所示,为图1多方向监控区域预警定位自动跟踪监控装置实施例动态检测和图像智能算法流程。As shown in Figure 11 and Figure 12, it is the dynamic detection and image intelligent algorithm flow of the embodiment of the multi-directional monitoring area early warning positioning automatic tracking monitoring device in Figure 1 .
步骤1对监控区域内预警视频图像进行图像智能算法分析,该步骤包括以下几个步骤:
步骤101采用高斯建模提取背景图像。Step 101 uses Gaussian modeling to extract the background image.
步骤102通过当前图像和背景图像做差分并且二值化得到关于运动目标的二值化前景图像。Step 102 is to obtain a binarized foreground image of the moving target by making a difference between the current image and the background image and binarizing.
步骤103通过对二值化前景图像进行轮廓搜索,用矩形框表示运动团块,确定出运动团块的位置(矩形中心位置)和尺寸(矩形长和宽)。Step 103 performs contour search on the binarized foreground image, represents the moving blob with a rectangular frame, and determines the position (rectangle center position) and size (rectangle length and width) of the moving blob.
步骤104对找到的运动团块进行合并,团块合并的最终结果作为运动检测目标的结果输出。Step 104 merges the found moving blobs, and the final result of blob merging is output as the result of the motion detection target.
步骤105对于当前帧检测到运动目标需要将其与之前的运动目标进行匹配以实现目标跟踪。匹配依据同一个运动目标在相邻图像帧间移动的像素距离很小和尺寸变化很小的原则进行,至此完成了对预警视频图像中运动目标的跟踪。并按照运动目标出现的先后顺序赋予运动目标标号(ID)。In step 105, if a moving object is detected in the current frame, it needs to be matched with previous moving objects to realize object tracking. The matching is carried out based on the principle that the pixel distance and size change of the same moving target moving between adjacent image frames is small, and the tracking of the moving target in the early warning video image is completed so far. And according to the order in which the moving objects appear, the moving objects are assigned IDs.
步骤2对多摄像机监控区域内的运动目标进行运动分析。
预警定位机构采用多摄像机监控方式实现了对监控区域的视频监控,运动目标在监控区域运动时,其运动范围可能跨越多个摄像机的监控区域,当运动目标从当前摄像机的监控视野进入到另一个监控视野时,同一运动目标的ID应该是不变的,预警定位机构的各摄像机都采用智能图像分析模块进行运动目标跟踪,各摄像机得到的运动目标跟踪结果需进行分析以识别出同一运动目标的跨区域运动,在多摄像机间的运动目标分析模块对预警定位机构的摄像机监控重叠区出现的目标采用摄像机标定方法分析运动目标在世界坐标系中的位置,根据同一运动目标的世界坐标系的位置一致的方法判断出现在重叠区的目标是否是同一目标。The early warning and positioning mechanism realizes the video monitoring of the monitoring area by adopting the multi-camera monitoring method. When the moving target moves in the monitoring area, its motion range may span the monitoring area of multiple cameras. When monitoring the field of view, the ID of the same moving target should remain unchanged. Each camera of the early warning and positioning mechanism uses an intelligent image analysis module to track the moving target. The moving target tracking results obtained by each camera need to be analyzed to identify the same moving target. Cross-regional movement, the moving target analysis module between multiple cameras adopts the camera calibration method to analyze the position of the moving target in the world coordinate system for the target that appears in the overlapping area of the camera monitoring of the early warning positioning mechanism, and according to the position of the same moving target in the world coordinate system The consistent method judges whether the objects appearing in the overlapping area are the same object.
预警定位机构采用多摄像机监控方式实现了对监控区域的视频监控,运动目标在监控区域运动时,其运动范围可能跨越多个摄像机的监控区域,当运动目标从当前摄像机的监控视野进入到另一个摄像机的监控视野时,同一运动目标的ID应该是不变的。The early warning and positioning mechanism realizes the video monitoring of the monitoring area by adopting the multi-camera monitoring method. When the moving target moves in the monitoring area, its motion range may span the monitoring area of multiple cameras. When monitoring the field of view of the camera, the ID of the same moving target should remain unchanged.
步骤3在监控区域内对有效区域内的运动目标进行筛选。
在监控区域内往往需要划定预警区域,对有效区域内的运动目标实行跟踪,预警区域的设置可在预警定位机构的各摄像机的视频图像上标定,根据运动目标在视频图像的位置信息判断目标是否出现在预警区域内。In the monitoring area, it is often necessary to delineate the early warning area, and track the moving target in the effective area. The setting of the early warning area can be calibrated on the video image of each camera of the early warning positioning mechanism, and the target can be judged according to the position information of the moving target in the video image. Whether it appears in the warning area.
步骤4制定跟踪策略。
跟踪策略的制定是为满足多运动目标进入预警区域时为跟踪示警机构选择一个有效的跟踪目标。跟踪策略可实现为自动跟踪方式,即选择最早出现的或者最大的有效跟踪目标作为跟踪示警机构的跟踪目标。当目标不在跟踪区域时选择下一个最早出现的有效跟踪目标作为跟踪示警机构的跟踪目标。优选地,跟踪策略可选择巡航跟踪方式,即当多个有效跟踪目标出现在有效跟踪区域时,跟踪示警机构对每个有效跟踪目标进行一段时间的连续跟踪,当运动目标丢失或者达到跟踪时间时,跟踪示警机构会选择下一个有效跟踪目标进行跟踪。The formulation of the tracking strategy is to select an effective tracking target for the tracking warning agency when multiple moving targets enter the warning area. The tracking strategy can be implemented as an automatic tracking method, that is, the earliest or largest effective tracking target is selected as the tracking target of the tracking warning agency. When the target is not in the tracking area, the next earliest effective tracking target is selected as the tracking target of the tracking warning mechanism. Preferably, the tracking strategy can choose the cruise tracking method, that is, when multiple effective tracking targets appear in the effective tracking area, the tracking warning mechanism will continuously track each effective tracking target for a period of time, and when the moving target is lost or the tracking time is reached , the tracking warning agency will select the next effective tracking target to track.
步骤5跟踪控制信号的转换。Step 5 tracks transitions of the control signal.
跟踪运动目标的控制信号有水平旋转信号、垂直旋转信号和变焦倍率值,水平旋转信号和垂直旋转信号可表示为具体的水平旋转角度和垂直旋转角度。The control signals for tracking moving targets include horizontal rotation signals, vertical rotation signals and zoom magnification values, and the horizontal rotation signals and vertical rotation signals can be expressed as specific horizontal rotation angles and vertical rotation angles.
预警定位机构中包含垂直向下安装的广角摄像机和倾斜一定角度的长焦镜头摄像机,在广角镜头摄像机下,广角镜头的像点投影关系满足图13中的广角镜头投影规则。The early warning positioning mechanism includes a wide-angle camera installed vertically downward and a telephoto lens camera tilted at a certain angle. Under the wide-angle lens camera, the image point projection relationship of the wide-angle lens satisfies the wide-angle lens projection rule in Figure 13.
如图13所示,点O是图像平面的圆心,OZ垂直于图像平面,OA和OB为两个入射光线,D1和D2分别是A和B的成像点。设α1和α2为∠AOZ和∠BOZ的弧度值,d1和d2为D1和D2到圆心O的距离。则投影关系满足:As shown in Figure 13, point O is the center of the image plane, OZ is perpendicular to the image plane, OA and OB are two incident rays, and D1 and D2 are the imaging points of A and B respectively. Let α1 and α2 be the radian values of ∠AOZ and ∠BOZ, and d1 and d2 be the distances from D1 and D2 to the center O of the circle. Then the projection relation satisfies:
α1/α2=d1/d2 (0≤α1≤α2≤π/2) (1)α1/α2=d1/d2 (0≤α1≤α2≤π/2) (1)
当α2=π/2时,d2等于地面的圆心半径R,有d1=2Rα1/π。When α2=π/2, d2 is equal to the radius R of the center of the ground, and d1=2Rα1/π.
对于广角图像的失真存在径向失真和切向失真,在此处我们仅考虑径向失真。For the distortion of wide-angle images, there are radial distortion and tangential distortion, here we only consider radial distortion.
在广角镜头摄像机下,如图14所示,如果已知跟踪示警机构观察景物点A时的垂直旋转角度α1,对于α1的获取,可以由操作人员遥控跟踪示警机构使成像点B位于跟踪视频图像的中心,查询跟踪示警机构此时的垂直旋转角度即为α1。同时,已知景物点A在图像上的成像点B在图像平面上的距离OB,已知景物点D在图像上的成像点C在图像平面上的距离OC,在图像平面上OB和OC即为运动目标的位置与图像中心的距离,根据公式(1)可以得到垂直旋转角度α2。Under the wide-angle lens camera, as shown in Figure 14, if the vertical rotation angle α1 when the tracking and warning mechanism observes the scene point A is known, for the acquisition of α1, the operator can remotely control the tracking and warning mechanism so that the imaging point B is located at the tracking video image Center, query and track the vertical rotation angle of the warning mechanism at this time is α1. At the same time, the distance OB of the imaging point B of the scene point A on the image on the image plane is known, and the distance OC of the imaging point C of the scene point D on the image is known on the image plane. On the image plane, OB and OC are is the distance between the position of the moving target and the center of the image, and the vertical rotation angle α2 can be obtained according to the formula (1).
已知跟踪示警机构观察景物点A时的水平旋转角度,在图像平面上可以得到景物点D的成像点C相对于景物点A的成像点B的相对角度∠BOC,因而景物点A相对景物点D的水平旋转角度不难得到。Knowing the horizontal rotation angle of the tracking and warning mechanism when observing the scene point A, the relative angle ∠BOC of the imaging point C of the scene point D relative to the imaging point B of the scene point A can be obtained on the image plane, so the relative angle of the scene point A relative to the scene point The horizontal rotation angle of D is not difficult to obtain.
在长焦镜头摄像机下,根据小孔成像模型,可以将预警定位机构与监控区域系统简化为摄像机投影模型(a)示意图(如图15所示)。Under the telephoto lens camera, according to the pinhole imaging model, the early warning positioning mechanism and the monitoring area system can be simplified into a schematic diagram of the camera projection model (a) (as shown in Figure 15).
图15中,平面ABU表示路平面,ABCD为摄像机拍摄到的路平面上的梯形区域,O点为摄像机镜头中心点,OG为摄像机光轴,G点为摄像机光轴和路平面的交点(同时也是视野梯形的对角线交点),I点为O点在路平面上的垂直投影。在路平面坐标系中,将G点定义为坐标系原点,运动目标前进方向定义为Y轴方向。G、A、B、C、D各点在图像平面内的对应点(如图16所示),是摄像机投影模型(b)示意图。In Fig. 15, the plane ABU represents the road plane, ABCD is the trapezoidal area on the road plane photographed by the camera, O point is the center point of the camera lens, OG is the camera optical axis, and G point is the intersection of the camera optical axis and the road plane (simultaneously It is also the intersection point of the diagonals of the view trapezoid), and point I is the vertical projection of point O on the road plane. In the road plane coordinate system, point G is defined as the origin of the coordinate system, and the moving target's forward direction is defined as the Y-axis direction. The corresponding points of points G, A, B, C, and D in the image plane (as shown in Figure 16) are schematic diagrams of the camera projection model (b).
a、b、c、d为图像平面矩形的四个顶点,H和W分别为图像平面的高和宽。定义图像矩形的中心点g为图像平面坐标系的坐标原点,y轴表示运动目标的前进方向。a, b, c, d are the four vertices of the image plane rectangle, H and W are the height and width of the image plane, respectively. Define the center point g of the image rectangle as the coordinate origin of the image plane coordinate system, and the y-axis indicates the forward direction of the moving target.
在路平面上取一点P,其在路平面坐标系的坐标为(XP,YP),P点在图像平面内的对应点为p,其在图像平面坐标系的坐标为(xp,yp)。Take a point P on the road plane, its coordinates in the road plane coordinate system are (XP , YP ), the corresponding point of P point in the image plane is p, and its coordinates in the image plane coordinate system are (xp , yp ).
利用几何关系可以推导出如下路平面坐标系与图像平面坐标系之间的对应关系:Using the geometric relationship, the correspondence between the road plane coordinate system and the image plane coordinate system can be deduced as follows:
YP=h·k1·yp·(1+k22)/(1-k2·k1·yp) (2)YP =h·k1 ·yp ·(1+k22 )/(1-k2 ·k1 ·yp ) (2)
XP=((UG+YP)/UG)·k3·xp·k4 (3)XP =((UG+YP )/UG)·k3 ·xp ·k4 (3)
yp=(YP/k1)/(h+h·k22+YP·k2) (4)yp =(YP /k1 )/(h+h·k22 +YP ·k2 ) (4)
xp=(UG·XP)/(k3·k4(UG+YP)) (5)xp =(UG·XP )/(k3 ·k4 (UG+YP )) (5)
式(2)、(3)、(4)、(5)中,In formula (2), (3), (4), (5),
k1=2tg(α0)/H (6)k1 =2tg(α0 )/H (6)
k2=tg(γ0) (7)k2 =tg(γ0 ) (7)
k3=h/cos(γ0) (8)k3 =h/cos(γ0 ) (8)
k4=2tg(β0)/W (9)k4 =2tg(β0 )/W (9)
UG=h·[tg(γ0)-tg(γ0-α0)]·cos(γ0-α0)/[cos(γ0-α0)-cos(γ0)](10)UG=h·[tg(γ0 )-tg(γ0 -α0 )]·cos(γ0 -α0 )/[cos(γ0 -α0 )-cos(γ0 )](10)
式(6)、(7)、(8)、(9)、(10)中,H为图像平面的高;W为图像平面的宽;h为摄像机的安装高度;2β0为摄像机镜头的水平视场角;2α0为摄像机镜头的垂直视场角;γ0为摄像机的俯仰角。In formulas (6), (7), (8), (9), and (10), H is the height of the image plane; W is the width of the image plane; h is the installation height of the camera;2β0 is the level of the camera lens Field of view; 2α0 is the vertical field of view of the camera lens; γ0 is the pitch angle of the camera.
式(2)与式(3)为图像平面到路平面的映射关系;式(4)与式(5)为路平面到图像平面的逆映射关系。具体推导过程本发明不做详细说明。Formula (2) and formula (3) are the mapping relationship from the image plane to the road plane; formula (4) and formula (5) are the inverse mapping relationship from the road plane to the image plane. The specific derivation process is not described in detail in the present invention.
根据景物点在路平面坐标系和图像平面坐标系的对应转换关系,在已知运动目标成像点的位置时,不难算出运动目标相对于监控装置的实际位置关系,再由空间几何关系得到运动目标的水平旋转角度和垂直旋转角度。对于跟踪示警机构观察运动目标的适宜变焦倍率值,可以以预警定位机构为中心的球坐标系中的绝对值来表示,操作跟踪示警机构到特定位置,进行适宜的变焦倍率查询,其余运动目标位置可以特定位置为基准计算相对值。According to the corresponding conversion relationship between the scene point in the road plane coordinate system and the image plane coordinate system, when the position of the imaging point of the moving target is known, it is not difficult to calculate the actual position relationship of the moving target relative to the monitoring device, and then obtain the motion from the spatial geometric relationship The horizontal rotation angle and vertical rotation angle of the target. For the appropriate zoom magnification value of the tracking and warning mechanism to observe the moving target, it can be represented by the absolute value in the spherical coordinate system centered on the early warning and positioning mechanism. Operate the tracking and warning mechanism to a specific position, and perform a suitable zoom magnification query. The remaining moving target positions Relative values can be calculated relative to a specific location.
如图17所示,为图1多方向监控区域预警定位自动跟踪监控装置的一变形实施例。As shown in FIG. 17 , it is a modified embodiment of the early warning and positioning automatic tracking monitoring device for the multi-directional monitoring area in FIG. 1 .
图17所示的实施例中,将预警定位机构2的水平预警部分218增设了两个水平预警摄像机212,使四个水平预警摄像机212朝向不同的方向,即各摄像机彼此位置有一定夹角,如图17所述四个水平预警摄像机212彼此间的夹角为90°,这样在图1实施例基础上就增加了两个监控方向,同时也增大了预警监控区域的范围,在每个摄像机的水平视场角均大于90°的前提下,通过四个水平预警摄像机可实现360°全景监控,其详细实施框图与图9框图原理相同,本发明不再进行描述。In the embodiment shown in Fig. 17, two horizontal early warning cameras 212 are added to the horizontal
如图18所示,为图9多方向监控区域预警定位自动跟踪监控装置的一变形实施例。As shown in FIG. 18 , it is a modified embodiment of the early warning, positioning and automatic tracking monitoring device for the multi-directional monitoring area in FIG. 9 .
图9所示的实施例中,第一控制单元通过第一通讯单元以串行通信的方式与主控设备进行通讯。第二视频转换单元将视频合成单元合成的全景视频数字信号转换为模拟复合视频信号,并通过同轴电缆传输至显示设备。音频采集单元将采集到的模拟音频信号通过同轴电缆传输至主控设备。声音示警单元通过同轴电缆接收主控设备发送的模拟示警声音。In the embodiment shown in FIG. 9 , the first control unit communicates with the main control device in a serial communication manner through the first communication unit. The second video conversion unit converts the panoramic video digital signal synthesized by the video synthesis unit into an analog composite video signal, and transmits it to the display device through the coaxial cable. The audio collecting unit transmits the collected analog audio signal to the main control device through the coaxial cable. The sound warning unit receives the analog warning sound sent by the main control device through the coaxial cable.
在本实施例中,预警定位模块还包括网络适配单元,所述网络适配单元还具备以太网接口、串行通讯接口、数字视频输入接口、数字音频输入接口和数字音频输出接口。网络适配单元采用以太网板。上述以太网板通过连接在其以太网接口上的LAN电缆连接到主控设备。以太网板根据TCP/IP协议从主控设备接收控制指令并将控制指令解码为串行控制指令,以太网板将上述串行控制指令通过串行通讯接口传输至第一通讯单元。而且,第一通讯单元将串行状态信息和串行报警指令通过串行通讯接口传输至以太网板,以太网板将串行状态信息和串行报警指令根据TCP/IP协议编码并传输至主控设备。而且,以太网板将视频合成单元合成的全景视频数字信号以数字信号形式传输至主控设备。而且,以太网板将音频采集单元采集到的数字音频信号以数字信号形式传输至主控设备。而且,以太网板将主控设备发送的数字示警声音以数字信号形式传输至声音示警单元。In this embodiment, the early warning positioning module further includes a network adaptation unit, and the network adaptation unit also has an Ethernet interface, a serial communication interface, a digital video input interface, a digital audio input interface and a digital audio output interface. The network adapter unit adopts the Ethernet board. The aforementioned Ethernet board is connected to the main control device through a LAN cable connected to its Ethernet interface. The Ethernet board receives control commands from the main control device according to the TCP/IP protocol and decodes the control commands into serial control commands, and the Ethernet board transmits the serial control commands to the first communication unit through the serial communication interface. Moreover, the first communication unit transmits the serial status information and the serial alarm command to the Ethernet board through the serial communication interface, and the Ethernet board encodes the serial status information and the serial alarm command according to the TCP/IP protocol and transmits them to the host control device. Moreover, the Ethernet board transmits the panoramic video digital signal synthesized by the video synthesis unit to the main control device in the form of a digital signal. Moreover, the Ethernet board transmits the digital audio signal collected by the audio collection unit to the main control device in the form of a digital signal. Moreover, the Ethernet board transmits the digital warning sound sent by the main control device to the sound warning unit in the form of digital signal.
在本实施例中,由于网络适配单元采用数字信号形式传输全景视频数字信号,故可省略第二视频转换单元。由于网络适配单元采用数字信号形式传输音频信号,故音频采集单元需为数字定向拾音器,声音示警单元需为数字定向扬声器。如采用模拟定向拾音器和模拟或数字定向扬声器,网络适配单元还应具备模拟音频输入接口和模拟音频输出接口,并附加具备进行模拟音频信号和数字音频信号相互转换的模数/数模音频编解码单元。In this embodiment, since the network adaptation unit transmits the panoramic video digital signal in the form of a digital signal, the second video conversion unit may be omitted. Since the network adapter unit transmits audio signals in the form of digital signals, the audio acquisition unit must be a digital directional pickup, and the sound warning unit must be a digital directional speaker. If an analog directional pickup and an analog or digital directional speaker are used, the network adapter unit shall also have an analog audio input interface and an analog audio output interface, and additionally have an analog-to-digital/digital-to-analog audio codec for mutual conversion between analog audio signals and digital audio signals. decoding unit.
在本实施例中,网络适配单元采用LAN电缆连接到主控设备。更优的,可以使网络适配单元通过无线网络通讯技术连接到主控设备或移动通讯终端。在这种实施例中,网络适配单元附加具备无线通讯功能的无线通讯单元,例如3G无线通讯模块或Wi-Fi无线通讯模块。In this embodiment, the network adaptation unit is connected to the main control device by using a LAN cable. More preferably, the network adaptation unit can be connected to the main control device or the mobile communication terminal through wireless network communication technology. In this embodiment, the network adaptation unit is additionally equipped with a wireless communication unit having a wireless communication function, such as a 3G wireless communication module or a Wi-Fi wireless communication module.
如图19所示,为图18多方向监控区域预警定位自动跟踪监控装置的一变形实施例。As shown in FIG. 19 , it is a modified embodiment of the multi-directional monitoring area early warning and positioning automatic tracking monitoring device in FIG. 18 .
如图18所示的实施例中,垂直预警视频采集单元、水平预警视频采集单元和跟踪视频采集单元均输出模拟视频信号。上述模拟视频信号经第一视频转换单元数字化后再传输至动态检测单元、视频存储单元和视频合成单元。In the embodiment shown in FIG. 18 , the vertical early warning video collection unit, the horizontal early warning video collection unit and the tracking video collection unit all output analog video signals. The above-mentioned analog video signal is digitized by the first video conversion unit and then transmitted to the motion detection unit, the video storage unit and the video synthesis unit.
本实施例中,垂直预警视频采集单元由广角镜头和数字摄像机组成。数字摄像机将广角镜头集光的光转换成电信号并最终以数字视频信号形式输出。水平预警视频采集单元由长焦镜头和数字摄像机组成。数字摄像机将长焦镜头集光的光转换成电信号并最终以数字视频信号形式输出。跟踪视频采集单元由变焦镜头和数字摄像机组成。数字摄像机将变焦镜头集光的光转换成电信号并最终以数字视频信号形式输出。In this embodiment, the vertical warning video acquisition unit is composed of a wide-angle lens and a digital camera. The digital camera converts the light collected by the wide-angle lens into an electrical signal and finally outputs it in the form of a digital video signal. The horizontal early warning video acquisition unit consists of a telephoto lens and a digital camera. The digital camera converts the light collected by the telephoto lens into an electrical signal and finally outputs it in the form of a digital video signal. The tracking video acquisition unit consists of a zoom lens and a digital camera. A digital video camera converts light collected by a zoom lens into an electrical signal and finally outputs it in the form of a digital video signal.
在本实施例中,由于垂直预警视频采集单元、水平预警视频采集单元和跟踪视频采集单元均输出数字视频信号,故可省略第一视频转换单元。监控装置以全数字方式工作。In this embodiment, since the vertical early warning video collection unit, the horizontal early warning video collection unit and the tracking video collection unit all output digital video signals, the first video conversion unit can be omitted. The monitoring device works in an all-digital manner.
如图20所示,为图1多方向监控区域预警定位自动跟踪监控装置的另一变形实施例。本实施例将水平预警部分218在垂直方向上增设n层,并且在每层水平预警部分中增设n个水平预警摄像机212,通过本实施例的组合可以实现多方向、更大监控区域的监控,其详细实施框图与图9框图原理相同,本发明不再进行详细描述。As shown in FIG. 20 , it is another modified embodiment of the multi-directional monitoring area early warning and positioning automatic tracking monitoring device in FIG. 1 . In this embodiment, the horizontal
如图21和图22所示,为图1多方向监控区域预警定位自动跟踪监控装置的另一变形实施例。As shown in Fig. 21 and Fig. 22, it is another modified embodiment of the early warning, positioning and automatic tracking monitoring device for the multi-directional monitoring area in Fig. 1 .
如图21所示,本实施例在监控装置上方增设n个跟踪示警机构,为满足多目标跟踪的需求。图9所示的实施例中,监控装置仅包含一个预警定位模块和一个跟踪示警模块。当预警定位模块中的动态检测单元检测到多个运动目标时,仅能控制跟踪示警模块对优先级最高的那一个运动目标进行跟踪示警。预警定位模块中的视频合成单元仅将全景视频画面分割为四个显示区间。As shown in FIG. 21 , in this embodiment, n tracking and warning mechanisms are added above the monitoring device to meet the requirement of multi-target tracking. In the embodiment shown in FIG. 9 , the monitoring device only includes an early warning and positioning module and a tracking and warning module. When the dynamic detection unit in the early warning and positioning module detects multiple moving targets, it can only control the tracking and warning module to track and warn the moving target with the highest priority. The video synthesis unit in the early warning positioning module only divides the panoramic video picture into four display intervals.
在本实施例中,监控装置包含一个预警定位模块和多个跟踪示警模块。预警定位模块通过第二通讯单元与多个跟踪示警模块进行通讯,预警定位模块通过第一视频转换单元从多个跟踪示警模块获取跟踪视频。In this embodiment, the monitoring device includes an early warning and positioning module and multiple tracking and warning modules. The early warning and positioning module communicates with multiple tracking and warning modules through the second communication unit, and the early warning and positioning module obtains tracking videos from the multiple tracking and warning modules through the first video conversion unit.
在本实施例中,由于第二通讯单元要与多个跟踪示警模块进行通讯,第二通讯单元发送的串行控制指令中需包含跟踪示警模块的ID或地址,从而能够保证第二通讯单元向多个跟踪示警模块选择性地发送串行控制指令。同样的,当跟踪示警模块向第二通讯单元发送串行状态信息时,串行状态信息中也需要包含跟踪示警模块的ID或地址,从而明确状态信息的来源。而且,由于预警定位模块的第二通讯单元连接有多个跟踪示警模块,各跟踪示警模块应设置为接收到相应的串行控制指令后才将自身的状态信传输至第二通讯单元。In this embodiment, since the second communication unit needs to communicate with multiple tracking and warning modules, the serial control command sent by the second communication unit needs to include the ID or address of the tracking and warning module, so as to ensure that the second communication unit sends Multiple tracking and warning modules selectively send serial control instructions. Similarly, when the tracking and warning module sends serial status information to the second communication unit, the serial status information also needs to include the ID or address of the tracking and warning module, so as to clarify the source of the status information. Moreover, since the second communication unit of the early warning positioning module is connected with multiple tracking and warning modules, each tracking and warning module should be configured to transmit its own status information to the second communication unit after receiving a corresponding serial control command.
在本实施例中,当存在多个运动目标时,动态检测单元先根据运动目标的大小、速度和出现的先后顺序(可考虑大小、速度和出现的先后顺序因素之一,或综合考虑其全都因素)对所有运动目标进行优先级排序。然后,根据运动目标的优先级顺序和跟踪示警机构的数量确定需要跟踪的运动目标。最后,计算出所有需要跟踪的运动目标的位置信息,动态检测单元将所有运动目标的位置信息转换为对相应跟踪示警模块的控制指令,并将上述对所有跟踪示警模块的控制指令传输至第一控制单元。In this embodiment, when there are multiple moving objects, the dynamic detection unit first bases on the size, speed, and order of appearance of the moving objects (one of the factors of size, speed, and order of appearance may be considered, or all of them may be considered comprehensively) factor) to prioritize all motion targets. Then, the moving objects to be tracked are determined according to the priority order of the moving objects and the number of tracking warning mechanisms. Finally, calculate the position information of all moving objects that need to be tracked, and the dynamic detection unit converts the position information of all moving objects into control instructions for corresponding tracking and warning modules, and transmits the above-mentioned control instructions for all tracking and warning modules to the first control unit.
在本实施例中,视频合成单元可以将视频画面分割为更多个显示区间,每个显示区间分别以数字垂直预警视频、数字水平预警视频和数字跟踪视频中的一路数字视频信号填充。In this embodiment, the video synthesis unit may divide the video picture into more display intervals, and each display interval is filled with one digital video signal from the digital vertical warning video, the digital horizontal warning video and the digital tracking video respectively.
如图23所示,为图1多方向监控区域预警定位自动跟踪监控装置的另一变形实施例。本实施例为图1实施例的变形,将监控装置上方增设n个跟踪示警机构满足多运动目标跟踪的需求,将预警定位机构中的水平预警部分增设n个水平预警摄像机,并且在垂直轴向上增设n层水平预警部分,该实施例可将监控区域的方向和监控范围的大小进行连续调节,不同组合适用不同的监控目的,其具体实施框图是在图9框图的基础上进行的集成开发,本发明不再进行详细描述。As shown in FIG. 23 , it is another modified embodiment of the early warning, positioning and automatic tracking monitoring device for the multi-directional monitoring area in FIG. 1 . This embodiment is a modification of the embodiment in Fig. 1, adding n tracking and warning mechanisms above the monitoring device to meet the needs of multi-moving target tracking, adding n horizontal warning cameras in the horizontal warning part of the early warning positioning mechanism, and in the vertical axis An n-level horizontal early warning part is added on the top. This embodiment can continuously adjust the direction of the monitoring area and the size of the monitoring range. Different combinations are suitable for different monitoring purposes. The specific implementation block diagram is integrated development carried out on the basis of the block diagram in Figure 9 , the present invention will not be described in detail.
如图24所示,为图1多方向监控区域预警定位自动跟踪监控装置的另一变形实施例。本实施例为图1实施例的变形,将跟踪示警机构安放在预警定位机构下方取代垂直预警部分,本实施例跟踪示警机构优先采用球型云台摄像机4,其设计思想也包含其它由水平/垂直旋转部件驱动的视频采集装置。As shown in FIG. 24 , it is another modified embodiment of the early warning, positioning and automatic tracking monitoring device for the multi-directional monitoring area in FIG. 1 . Present embodiment is the distortion of Fig. 1 embodiment, and the tracking warning mechanism is arranged below the early warning positioning mechanism to replace the vertical early warning part. Video capture device driven by vertically rotating components.
如图25所示,为图9多方向监控区域预警定位自动跟踪监控装置的另一变形实施例。图9所示的实施例中,预警定位模块包含垂直预警视频采集单元和水平预警视频采集单元。动态检测单元检测垂直预警视频采集单元和水平预警视频采集单元输出的预警视频。As shown in FIG. 25 , it is another modified embodiment of the early warning and positioning automatic tracking monitoring device for the multi-directional monitoring area in FIG. 9 . In the embodiment shown in FIG. 9 , the early warning positioning module includes a vertical early warning video acquisition unit and a horizontal early warning video acquisition unit. The dynamic detection unit detects the early warning video output by the vertical early warning video acquisition unit and the horizontal early warning video acquisition unit.
在本实施例中,采用跟踪视频采集单元替代垂直预警视频采集单元。在无运动目标出现的情况下,跟踪视频采集单元负责对本发明所述监控装置正下方的监控区域进行垂直预警视频采集(本实施例中,简称跟踪视频采集单元此时处于“预警状态”)。针对预警状态,跟踪视频采集单元应预设有预警位置。当调用预警位置时,第二控制单元控制垂直旋转电机驱动单元,进而控制垂直旋转电机带动跟踪示警机构转动,最终使跟踪示警机构在垂直方向上朝向监控装置正下方的监控区域。第二控制单元还控制镜头变焦电机驱动单元,进而控制镜头变焦电机带动变焦镜头镜组转动,最终使变焦镜头处于广角状态,使得摄像机拍摄视频图像的面积最大化。In this embodiment, the vertical warning video collection unit is replaced by a tracking video collection unit. When there is no moving target, the tracking video acquisition unit is responsible for vertical early warning video acquisition of the monitoring area directly below the monitoring device of the present invention (in this embodiment, the tracking video acquisition unit is in the "early warning state" for short). For the early warning state, the tracking video acquisition unit should have a preset early warning position. When the warning position is called, the second control unit controls the vertical rotation motor drive unit, and then controls the vertical rotation motor to drive the tracking and warning mechanism to rotate, and finally makes the tracking and warning mechanism face the monitoring area directly below the monitoring device in the vertical direction. The second control unit also controls the lens zoom motor driving unit, and then controls the lens zoom motor to drive the zoom lens group to rotate, and finally makes the zoom lens in a wide-angle state, so that the area of the video image captured by the camera is maximized.
在本实施例中,动态检测单元检测跟踪视频采集单元和水平预警视频采集单元输出的预警视频。当动态检测单元检测到运动目标时,跟踪视频采集单元负责对运动目标所在监控区域进行跟踪视频采集(本实施例中,简称跟踪视频采集单元此时处于“跟踪状态”)。当运动目标在预警视频中消失后,跟踪视频采集单元应退出跟踪状态,自动调用预警位置并进入预警状态。In this embodiment, the dynamic detection unit detects the early warning video output by the tracking video collection unit and the horizontal early warning video collection unit. When the dynamic detection unit detects a moving target, the tracking video acquisition unit is responsible for tracking video acquisition of the monitoring area where the moving target is located (in this embodiment, the tracking video acquisition unit is in the “tracking state” for short). When the moving target disappears in the early warning video, the tracking video acquisition unit should exit the tracking state, automatically call the early warning position and enter the early warning state.
上述参照各实施例对该多方向监控区域预警定位自动跟踪监控装置进行的详细描述,是说明性的而不是限定性的,因此在不脱离本发明总体构思下的变化和修改,应属本发明的保护范围之内。The above detailed description of the multi-directional monitoring area early warning positioning automatic tracking monitoring device with reference to various embodiments is illustrative rather than restrictive, so changes and modifications without departing from the general concept of the present invention shall belong to the present invention within the scope of protection.
Claims (26)
Translated fromChinesePriority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210357740.1ACN102868875B (en) | 2012-09-24 | 2012-09-24 | Multi-direction guarded region early warning positioning automatic tracking supervising device |
| PCT/CN2012/083257WO2014043976A1 (en) | 2012-09-24 | 2012-10-20 | Prewarning locating automatic tracking monitoring device for multidirectional monitoring area |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210357740.1ACN102868875B (en) | 2012-09-24 | 2012-09-24 | Multi-direction guarded region early warning positioning automatic tracking supervising device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102868875Atrue CN102868875A (en) | 2013-01-09 |
| CN102868875B CN102868875B (en) | 2015-11-18 |
Family
ID=47447446
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201210357740.1AActiveCN102868875B (en) | 2012-09-24 | 2012-09-24 | Multi-direction guarded region early warning positioning automatic tracking supervising device |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN102868875B (en) |
Cited By (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103051884A (en)* | 2013-01-14 | 2013-04-17 | 哈尔滨工程大学 | Omni-directional visual monitoring system combining rough and fine modes |
| CN103051880A (en)* | 2012-12-29 | 2013-04-17 | 苏州市职业大学 | Video monitoring system device based on multiple cameras |
| CN103108164A (en)* | 2013-02-01 | 2013-05-15 | 南京迈得特光学有限公司 | Compound eye type panorama continuous tracking and monitoring system |
| CN103118243A (en)* | 2013-01-24 | 2013-05-22 | 天津市亚安科技股份有限公司 | Audio and video monitoring device with panorama function and adapterization function |
| CN103327308A (en)* | 2013-06-28 | 2013-09-25 | 四川优美信息技术有限公司 | Angle adjustable audio-video monitoring device |
| CN104038733A (en)* | 2014-05-21 | 2014-09-10 | 天津市亚安科技股份有限公司 | Sentinel early warning monitoring system |
| CN104065869A (en)* | 2013-03-18 | 2014-09-24 | 三星电子株式会社 | Method for displaying image in combination with playing audio in electronic device |
| CN104135645A (en)* | 2014-07-31 | 2014-11-05 | 天津市亚安科技股份有限公司 | Video surveillance system and method for face tracking and capturing |
| CN104581090A (en)* | 2015-02-11 | 2015-04-29 | 宁波澎湃电子科技有限公司 | Beforehand security and protection system and monitoring method |
| CN104601968A (en)* | 2015-02-11 | 2015-05-06 | 宁波澎湃电子科技有限公司 | Beforehand security and protection system and monitoring method |
| CN104601967A (en)* | 2015-02-11 | 2015-05-06 | 宁波澎湃电子科技有限公司 | Beforehand security and protection system and monitoring method |
| CN105069795A (en)* | 2015-08-12 | 2015-11-18 | 深圳锐取信息技术股份有限公司 | Moving object tracking method and apparatus |
| CN106056519A (en)* | 2016-07-25 | 2016-10-26 | 浙江文澜信息发展有限公司 | Social governance integration platform |
| CN106303403A (en)* | 2015-06-12 | 2017-01-04 | 中国人民公安大学 | Supervising device presetting bit setting, changing method and system |
| CN106326844A (en)* | 2016-08-15 | 2017-01-11 | 刘知迪 | Recording system for intelligently monitoring image, and application of recording system |
| CN107079087A (en)* | 2014-10-31 | 2017-08-18 | 富士胶片株式会社 | Camera device and object recognition methods |
| TWI602010B (en)* | 2016-10-27 | 2017-10-11 | 晶睿通訊股份有限公司 | Image surveillance device and light emitting module thereof |
| CN107578422A (en)* | 2017-08-01 | 2018-01-12 | 中国农业大学 | System and method for pedestrian tracking and detection |
| CN107888889A (en)* | 2017-12-21 | 2018-04-06 | 南京因坦利软件有限公司 | A kind of video monitoring apparatus for conference service |
| US9953506B2 (en) | 2015-10-28 | 2018-04-24 | Xiaomi Inc. | Alarming method and device |
| CN109756698A (en)* | 2017-11-03 | 2019-05-14 | 深圳市航盛电子股份有限公司 | Applied to the moving object method for early warning of automotive camera system, automotive camera system |
| CN110145669A (en)* | 2019-06-22 | 2019-08-20 | 苏州有单互联网科技有限公司 | An outdoor security surveillance video surveillance equipment mounting frame |
| CN110266921A (en)* | 2019-06-20 | 2019-09-20 | 浙江大华技术股份有限公司 | Camera and monitoring system using the camera |
| CN110267010A (en)* | 2019-06-28 | 2019-09-20 | Oppo广东移动通信有限公司 | Image processing method, image processing apparatus, server, and storage medium |
| CN110460748A (en)* | 2018-05-08 | 2019-11-15 | 杭州海康威视数字技术股份有限公司 | A kind of video camera and monitoring system |
| CN111770312A (en)* | 2020-07-13 | 2020-10-13 | 深圳市元黎技术有限公司 | Security monitoring method and security monitoring system |
| CN112492259A (en)* | 2019-09-12 | 2021-03-12 | 杭州海康威视数字技术股份有限公司 | Monitoring device and monitoring method |
| CN112580421A (en)* | 2019-09-30 | 2021-03-30 | 卡巴斯基实验室股份制公司 | System and method for detecting unmanned aerial vehicles |
| CN112911249A (en)* | 2021-03-23 | 2021-06-04 | 浙江大华技术股份有限公司 | Target object tracking method and device, storage medium and electronic device |
| CN113344965A (en)* | 2021-08-05 | 2021-09-03 | 鑫安利中(北京)科技有限公司 | Safety management system based on image acquisition |
| CN113389999A (en)* | 2020-03-10 | 2021-09-14 | 浙江宇视科技有限公司 | Camera with warning function |
| CN113665495A (en)* | 2021-09-23 | 2021-11-19 | 温州大学大数据与信息技术研究院 | Vehicle-mounted target tracker convenient to install and based on computer vision |
| CN113936501A (en)* | 2021-10-12 | 2022-01-14 | 青岛科技大学 | Intelligent crossing traffic early warning system based on target detection |
| CN115150559A (en)* | 2022-09-06 | 2022-10-04 | 国网天津市电力公司高压分公司 | Remote vision system with acquisition self-adjustment calculation compensation and calculation compensation method |
| CN116112644A (en)* | 2023-03-23 | 2023-05-12 | 中建三局集团华南有限公司 | Remote video broadcast megaphone device |
| CN116233600A (en)* | 2023-05-09 | 2023-06-06 | 安徽省赛达科技有限责任公司 | an internet of things camera |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102342099A (en)* | 2009-05-29 | 2012-02-01 | (株)荣国电子 | Intelligent monitoring camera apparatus and image monitoring system implementing same |
| CN102651813A (en)* | 2012-04-09 | 2012-08-29 | 重庆市行安电子科技有限公司 | Intelligent video monitoring and advertising system |
| CN202818503U (en)* | 2012-09-24 | 2013-03-20 | 天津市亚安科技股份有限公司 | Multidirectional monitoring area early warning positioning automatic tracking and monitoring device |
- 2012
- 2012-09-24CNCN201210357740.1Apatent/CN102868875B/enactiveActive
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102342099A (en)* | 2009-05-29 | 2012-02-01 | (株)荣国电子 | Intelligent monitoring camera apparatus and image monitoring system implementing same |
| CN102651813A (en)* | 2012-04-09 | 2012-08-29 | 重庆市行安电子科技有限公司 | Intelligent video monitoring and advertising system |
| CN202818503U (en)* | 2012-09-24 | 2013-03-20 | 天津市亚安科技股份有限公司 | Multidirectional monitoring area early warning positioning automatic tracking and monitoring device |
Cited By (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103051880A (en)* | 2012-12-29 | 2013-04-17 | 苏州市职业大学 | Video monitoring system device based on multiple cameras |
| CN103051884A (en)* | 2013-01-14 | 2013-04-17 | 哈尔滨工程大学 | Omni-directional visual monitoring system combining rough and fine modes |
| CN103118243A (en)* | 2013-01-24 | 2013-05-22 | 天津市亚安科技股份有限公司 | Audio and video monitoring device with panorama function and adapterization function |
| CN103108164A (en)* | 2013-02-01 | 2013-05-15 | 南京迈得特光学有限公司 | Compound eye type panorama continuous tracking and monitoring system |
| CN104065869A (en)* | 2013-03-18 | 2014-09-24 | 三星电子株式会社 | Method for displaying image in combination with playing audio in electronic device |
| US9743033B2 (en) | 2013-03-18 | 2017-08-22 | Samsung Electronics Co., Ltd | Method for displaying image combined with playing audio in an electronic device |
| CN104065869B (en)* | 2013-03-18 | 2018-04-27 | 三星电子株式会社 | Method with showing image with playing audio combination in an electronic |
| CN103327308A (en)* | 2013-06-28 | 2013-09-25 | 四川优美信息技术有限公司 | Angle adjustable audio-video monitoring device |
| CN104038733A (en)* | 2014-05-21 | 2014-09-10 | 天津市亚安科技股份有限公司 | Sentinel early warning monitoring system |
| CN104135645A (en)* | 2014-07-31 | 2014-11-05 | 天津市亚安科技股份有限公司 | Video surveillance system and method for face tracking and capturing |
| CN107079087B (en)* | 2014-10-31 | 2021-01-26 | 富士胶片株式会社 | Imaging device and object recognition method |
| CN107079087A (en)* | 2014-10-31 | 2017-08-18 | 富士胶片株式会社 | Camera device and object recognition methods |
| CN104601967A (en)* | 2015-02-11 | 2015-05-06 | 宁波澎湃电子科技有限公司 | Beforehand security and protection system and monitoring method |
| CN104601968A (en)* | 2015-02-11 | 2015-05-06 | 宁波澎湃电子科技有限公司 | Beforehand security and protection system and monitoring method |
| CN104581090A (en)* | 2015-02-11 | 2015-04-29 | 宁波澎湃电子科技有限公司 | Beforehand security and protection system and monitoring method |
| CN106303403A (en)* | 2015-06-12 | 2017-01-04 | 中国人民公安大学 | Supervising device presetting bit setting, changing method and system |
| CN106303403B (en)* | 2015-06-12 | 2019-03-12 | 中国人民公安大学 | Monitoring device presetting bit setting, switching method and system |
| CN105069795A (en)* | 2015-08-12 | 2015-11-18 | 深圳锐取信息技术股份有限公司 | Moving object tracking method and apparatus |
| CN105069795B (en)* | 2015-08-12 | 2017-12-22 | 深圳锐取信息技术股份有限公司 | Moving object tracking method and device |
| US9953506B2 (en) | 2015-10-28 | 2018-04-24 | Xiaomi Inc. | Alarming method and device |
| CN106056519A (en)* | 2016-07-25 | 2016-10-26 | 浙江文澜信息发展有限公司 | Social governance integration platform |
| CN106056519B (en)* | 2016-07-25 | 2022-01-21 | 浙江文澜信息发展有限公司 | Social control comprehensive platform |
| CN106326844A (en)* | 2016-08-15 | 2017-01-11 | 刘知迪 | Recording system for intelligently monitoring image, and application of recording system |
| TWI602010B (en)* | 2016-10-27 | 2017-10-11 | 晶睿通訊股份有限公司 | Image surveillance device and light emitting module thereof |
| CN107578422A (en)* | 2017-08-01 | 2018-01-12 | 中国农业大学 | System and method for pedestrian tracking and detection |
| CN107578422B (en)* | 2017-08-01 | 2024-04-09 | 中国农业大学 | Pedestrian tracking detection system and method |
| CN109756698A (en)* | 2017-11-03 | 2019-05-14 | 深圳市航盛电子股份有限公司 | Applied to the moving object method for early warning of automotive camera system, automotive camera system |
| CN107888889A (en)* | 2017-12-21 | 2018-04-06 | 南京因坦利软件有限公司 | A kind of video monitoring apparatus for conference service |
| CN110460748A (en)* | 2018-05-08 | 2019-11-15 | 杭州海康威视数字技术股份有限公司 | A kind of video camera and monitoring system |
| CN110266921A (en)* | 2019-06-20 | 2019-09-20 | 浙江大华技术股份有限公司 | Camera and monitoring system using the camera |
| CN110145669A (en)* | 2019-06-22 | 2019-08-20 | 苏州有单互联网科技有限公司 | An outdoor security surveillance video surveillance equipment mounting frame |
| CN110267010B (en)* | 2019-06-28 | 2021-04-13 | Oppo广东移动通信有限公司 | Image processing method, image processing apparatus, server, and storage medium |
| CN110267010A (en)* | 2019-06-28 | 2019-09-20 | Oppo广东移动通信有限公司 | Image processing method, image processing apparatus, server, and storage medium |
| CN112492259A (en)* | 2019-09-12 | 2021-03-12 | 杭州海康威视数字技术股份有限公司 | Monitoring device and monitoring method |
| CN112492259B (en)* | 2019-09-12 | 2023-07-04 | 杭州海康威视数字技术股份有限公司 | Monitoring equipment and monitoring method |
| CN112580421A (en)* | 2019-09-30 | 2021-03-30 | 卡巴斯基实验室股份制公司 | System and method for detecting unmanned aerial vehicles |
| CN113389999A (en)* | 2020-03-10 | 2021-09-14 | 浙江宇视科技有限公司 | Camera with warning function |
| CN111770312A (en)* | 2020-07-13 | 2020-10-13 | 深圳市元黎技术有限公司 | Security monitoring method and security monitoring system |
| CN112911249A (en)* | 2021-03-23 | 2021-06-04 | 浙江大华技术股份有限公司 | Target object tracking method and device, storage medium and electronic device |
| CN113344965A (en)* | 2021-08-05 | 2021-09-03 | 鑫安利中(北京)科技有限公司 | Safety management system based on image acquisition |
| CN113665495A (en)* | 2021-09-23 | 2021-11-19 | 温州大学大数据与信息技术研究院 | Vehicle-mounted target tracker convenient to install and based on computer vision |
| CN113936501A (en)* | 2021-10-12 | 2022-01-14 | 青岛科技大学 | Intelligent crossing traffic early warning system based on target detection |
| CN115150559A (en)* | 2022-09-06 | 2022-10-04 | 国网天津市电力公司高压分公司 | Remote vision system with acquisition self-adjustment calculation compensation and calculation compensation method |
| CN116112644A (en)* | 2023-03-23 | 2023-05-12 | 中建三局集团华南有限公司 | Remote video broadcast megaphone device |
| CN116233600A (en)* | 2023-05-09 | 2023-06-06 | 安徽省赛达科技有限责任公司 | an internet of things camera |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102868875B (en) | 2015-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102868875B (en) | Multi-direction guarded region early warning positioning automatic tracking supervising device | |
| WO2014043976A1 (en) | Prewarning locating automatic tracking monitoring device for multidirectional monitoring area | |
| US8390686B2 (en) | Surveillance camera apparatus and surveillance camera system | |
| CN102577347B (en) | All-around intelligent makes an inspection tour the spherical surveillance camera system and method with Situation Awareness automatically | |
| AU2005242076B2 (en) | Digital camera with non-uniform image resolution | |
| CN202818503U (en) | Multidirectional monitoring area early warning positioning automatic tracking and monitoring device | |
| CN111182210B (en) | A dual-pan-tilt multi-target tracking camera for binocular analysis | |
| KR101120131B1 (en) | Intelligent Panorama Camera, Circuit and Method for Controlling thereof, and Video Monitoring System | |
| KR101502448B1 (en) | Video Surveillance System and Method Having Field of Views of 360 Degrees Horizontally and Vertically | |
| WO2006074161A2 (en) | Systems and methods for night time surveillance | |
| CN105812736A (en) | Self-adjustment Pan/Tilt/Zoom camera remote intelligent control system and control method | |
| CN102857741A (en) | Prewarning positioning monitoring device of multi-directional monitoring area | |
| CN108881702B (en) | A system and method for capturing the motion trajectory of an object with multiple cameras | |
| KR20130071510A (en) | Surveillance camera apparatus, wide area surveillance system, and cooperative tracking method in the same | |
| CN101021669A (en) | Whole-view field imaging and displaying method and system | |
| CN109151294A (en) | A kind of binocular integral type dynamic human face candid photograph photographic device based on single-chip | |
| WO2009066988A2 (en) | Device and method for a surveillance system | |
| CN103051884A (en) | Omni-directional visual monitoring system combining rough and fine modes | |
| JP2011109630A (en) | Universal head for camera apparatus | |
| CN206878992U (en) | A kind of vehicle-mounted panoramic video camera of linkage | |
| CN111432187B (en) | Method, system and device for tracking transaction target | |
| CN202818502U (en) | Multidirectional monitoring area early warning positioning monitoring device | |
| KR20110136907A (en) | Wide area monitoring system and monitoring data processing method therefor | |
| CN114554093B (en) | Image acquisition system and target tracking method | |
| CN204906574U (en) | Monitoring device and system thereof |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C53 | Correction of patent of invention or patent application | ||
| CB03 | Change of inventor or designer information | Inventor after:Ye Chen Inventor after:Wu Fujun Inventor after:Song Yan Inventor after:Feng Rongxuan Inventor after:Fan Wei Inventor after:Zhang Yu Inventor after:Zeng Ji Inventor before:Ye Chen Inventor before:Wu Fujun Inventor before:Song Yan Inventor before:Feng Rongxuan Inventor before:Zhang Yu Inventor before:Zeng Ji | |
| COR | Change of bibliographic data | Free format text:CORRECT: INVENTOR; FROM: YE CHEN WU FUJUN SONG YAN FENG RONGXUAN ZHANG YU CENG JI TO: YE CHEN WU FUJUN SONG YAN FENG RONGXUAN FAN WEI ZHANG YU CENG JI | |
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C56 | Change in the name or address of the patentee | ||
| CP03 | Change of name, title or address | Address after:300384 in Tianjin Binhai Huayuan Industrial Zone (outer ring) eight Haitai Huake Road No. 6 Patentee after:TIANJIN YAAN TECHNOLOGY Co.,Ltd. Address before:Zi Yuan Road 300384 Tianjin city Nankai District Huayuan Industrial Park No. 8 Patentee before:TIANJIN YAAN TECHNOLOGY Co.,Ltd. | |
| PP01 | Preservation of patent right | ||
| PP01 | Preservation of patent right | Effective date of registration:20190701 Granted publication date:20151118 | |
| PD01 | Discharge of preservation of patent | ||
| PD01 | Discharge of preservation of patent | Date of cancellation:20220701 Granted publication date:20151118 | |
| PP01 | Preservation of patent right | ||
| PP01 | Preservation of patent right | Effective date of registration:20220701 Granted publication date:20151118 | |
| PD01 | Discharge of preservation of patent | ||
| PD01 | Discharge of preservation of patent | Date of cancellation:20250721 Granted publication date:20151118 |