CN102764157A - Robot for orthopaedic surgery - Google Patents
Robot for orthopaedic surgeryDownload PDFInfo
- Publication number
- CN102764157A CN102764157ACN2012101088472ACN201210108847ACN102764157ACN 102764157 ACN102764157 ACN 102764157ACN 2012101088472 ACN2012101088472 ACN 2012101088472ACN 201210108847 ACN201210108847 ACN 201210108847ACN 102764157 ACN102764157 ACN 102764157A
- Authority
- CN
- China
- Prior art keywords
- joint
- robot
- arm
- bone surgery
- surgery according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012829orthopaedic surgeryMethods0.000titleabstract4
- 230000005484gravityEffects0.000claimsabstractdescription16
- 238000001356surgical procedureMethods0.000claimsabstractdescription16
- 230000007246mechanismEffects0.000claimsdescription13
- 210000000707wristAnatomy0.000claimsdescription11
- 210000000245forearmAnatomy0.000claimsdescription10
- 230000008878couplingEffects0.000claimsdescription7
- 238000010168coupling processMethods0.000claimsdescription7
- 238000005859coupling reactionMethods0.000claimsdescription7
- 210000000988bone and boneAnatomy0.000claims9
- 230000000399orthopedic effectEffects0.000description25
- 239000003638chemical reducing agentSubstances0.000description6
- 229910000831SteelInorganic materials0.000description4
- 238000010586diagramMethods0.000description4
- 238000006073displacement reactionMethods0.000description4
- 230000009467reductionEffects0.000description4
- 239000010959steelSubstances0.000description4
- 238000011161developmentMethods0.000description2
- 238000005516engineering processMethods0.000description2
- 238000009434installationMethods0.000description1
- 238000000034methodMethods0.000description1
- 238000004377microelectronicMethods0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 230000000474nursing effectEffects0.000description1
- 238000012545processingMethods0.000description1
- 238000011160researchMethods0.000description1
Images




Landscapes
- Manipulator (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及医疗机器人技术领域,特别是涉及一种骨科手术机器人。The invention relates to the technical field of medical robots, in particular to an orthopedic surgery robot.
背景技术Background technique
计算机技术、微电子技术以及医学科学的发展是机器人发展的前进动力,医用机器人得到了很大的发展,并有广泛的应用。目前,医疗机器人的研究主要集中在外科手术机器人、康复机器人、护理机器人和微型机器人等几个方面。其中,根据结构形式的不同外科手术机器人可分为主动式外科手术机器人、主从式外科手术机器人和遥操作式外科手术机器人。The development of computer technology, microelectronics technology and medical science is the driving force for the development of robots. Medical robots have been greatly developed and widely used. At present, research on medical robots mainly focuses on surgical robots, rehabilitation robots, nursing robots and micro-robots. Among them, according to different structural forms, surgical robots can be divided into active surgical robots, master-slave surgical robots, and teleoperated surgical robots.
骨科手术机器人是一种外科手术机器人。传统的骨科手术机器人在手术工作空间利用率低,很难覆盖所有需要进行手术操作的位置。另外,在机器人发生故障或误操作时,机械手臂会因重力的影响沿垂直平面下落,损伤安装于骨科手术机器人端部的手术工具甚至造成医疗事故。An orthopedic surgical robot is a surgical robot. Traditional orthopedic surgical robots have a low utilization rate of the surgical workspace, and it is difficult to cover all the positions that require surgical operations. In addition, when the robot fails or is misoperated, the mechanical arm will fall along the vertical plane due to the influence of gravity, which will damage the surgical tools installed at the end of the orthopedic surgical robot and even cause medical accidents.
发明内容Contents of the invention
基于此,有必要针对传统的骨科手术机器人手术空间利用率低的问题,提供一种手术利用空降较高的骨科手术机器人。Based on this, it is necessary to provide an orthopedic surgical robot with high airborne surgical utilization to solve the problem of low surgical space utilization of traditional orthopedic surgical robots.
一种骨科手术机器人,包括支架、升降组件、大臂、小臂和旋转臂,所述升降组件安装于支架,所述升降组件与所述大臂通过第一关节转动连接,所述大臂与所述小臂通过第二关节转动连接,所述小臂与所述旋转臂通过第三关节转动连接;所述第一关节、第二关节的回转轴线平行于重力方向;所述第三关节的回转轴线垂直于重力方向。An orthopedic surgical robot, comprising a bracket, a lifting assembly, a large arm, a small arm and a rotating arm, the lifting assembly is installed on the bracket, the lifting assembly is connected to the large arm through a first joint rotation, and the large arm is connected to the The forearm is rotatably connected through a second joint, and the forearm and the rotating arm are rotatably connected through a third joint; the axes of rotation of the first and second joints are parallel to the direction of gravity; the third joint The axis of rotation is perpendicular to the direction of gravity.
在其中一个实施例中,所述升降组件包括丝杆、丝杆螺母、连接件和驱动机构,所述丝杆螺母旋于丝杆,所述连接件的一端固定于所述丝杆螺母,另一端与所述大臂转动连接,所述驱动机构安装于所述支架,所述丝杆的一端与所述驱动机构连接,另一端与所述支架转动连接。In one of the embodiments, the lifting assembly includes a screw, a screw nut, a connecting piece and a driving mechanism, the screw nut is screwed on the screw, one end of the connecting piece is fixed to the screw nut, and the other One end is rotatably connected to the boom, the driving mechanism is installed on the bracket, one end of the screw rod is connected to the driving mechanism, and the other end is rotatably connected to the bracket.
在其中一个实施例中,所述第三关节的回转轴线平行于所述小臂的延伸方向。In one of the embodiments, the rotation axis of the third joint is parallel to the extension direction of the forearm.
在其中一个实施例中,还包括腕部组件,所述腕部组件通过第四关节与所述旋转臂远离所述第三关节的一端转动连接。In one of the embodiments, it further includes a wrist assembly, and the wrist assembly is rotationally connected to an end of the rotating arm away from the third joint through a fourth joint.
在其中一个实施例中,所述第四关节的回转轴线垂直于所述旋转臂的延伸方向。In one of the embodiments, the rotation axis of the fourth joint is perpendicular to the extension direction of the rotation arm.
在其中一个实施例中,所述腕部组件包括手术器械安装件和俯仰臂,所述俯仰臂通过所述第四关节与所述旋转臂相连,所述手术器械安装件安装于所述俯仰臂。In one of the embodiments, the wrist assembly includes a surgical instrument mount and a pitch arm, the pitch arm is connected to the rotating arm through the fourth joint, and the surgical instrument mount is mounted on the pitch arm .
在其中一个实施例中,所述腕部组件还包括标识件,所述标识件安装于所述俯仰臂远离所述手术器械安装件的一端。In one of the embodiments, the wrist assembly further includes an identification part, and the identification part is mounted on an end of the pitch arm away from the surgical instrument installation part.
在其中一个实施例中,所述驱动机构包括联轴器、多级减速箱、伺服电机和编码器,所述丝杠依次通过所述联轴器、多级减速箱与所述伺服电机的输出轴连接,所述编码器安装于所述伺服电机。In one of the embodiments, the driving mechanism includes a shaft coupling, a multi-stage reduction box, a servo motor and an encoder, and the lead screw passes through the output of the shaft coupling, the multi-stage reduction box and the servo motor in sequence. The shaft is connected, and the encoder is installed on the servo motor.
在其中一个实施例中,所述编码器与手术机器人的控制系统相连接。In one of the embodiments, the encoder is connected with the control system of the surgical robot.
上述骨科手术机器人中,第一关节、第二关节的回转轴线平行于重力方向,通过转动第一关节和第二关节以及移动升降组件调整大臂和小臂的位置,可以使手术时,骨科手术器械覆盖所有需要进行手术操作的位置,提高了手术空间利用率。In the above-mentioned orthopedic surgery robot, the rotation axes of the first joint and the second joint are parallel to the direction of gravity. By rotating the first joint and the second joint and moving the lifting assembly to adjust the positions of the upper arm and the forearm, it is possible to make the orthopedic surgery The instrument covers all the positions that need to be operated on, which improves the utilization rate of the operating space.
附图说明Description of drawings
图1为本发明较佳实施例的立体图;Fig. 1 is a perspective view of a preferred embodiment of the present invention;
图2为图1中旋转臂转动时一个角度的姿态图;Fig. 2 is a posture diagram of an angle when the rotating arm in Fig. 1 rotates;
图3为图1中旋转臂转动时另一个角度的姿态图;Fig. 3 is a posture diagram of another angle when the rotating arm in Fig. 1 rotates;
图4为图1中俯仰臂作俯仰运动时一个角度的姿态图;Fig. 4 is a posture diagram of an angle when the pitching arm in Fig. 1 performs a pitching motion;
图5为图1中俯仰臂作俯仰运动时另一个角度的姿态图。Fig. 5 is a posture diagram of another angle when the pitching arm in Fig. 1 performs a pitching motion.
具体实施方式Detailed ways
针对传统的骨科手术机器人在手术工作空间利用率低,很难覆盖所有需要进行手术操作的位置,以及在机器人发生故障或误操作时,机械手臂会因重力的影响沿垂直平面下落,损伤安装于骨科手术机器人端部的手术工具甚至造成医疗事故的问题,提供了一种骨科手术机器人。In view of the low utilization rate of the surgical workspace of traditional orthopedic surgical robots, it is difficult to cover all the positions that need to be operated on, and when the robot fails or is misoperated, the mechanical arm will fall along the vertical plane due to the influence of gravity, which will damage the The surgical tool at the end of the orthopedic surgical robot even causes the problem of medical malpractice, and an orthopedic surgical robot is provided.
如图1所示,本发明较佳实施例的骨科手术机器人,包括支架110、安装于支架的升降组件120、大臂130、小臂140和旋转臂150。升降组件120安装于支架110,升降组件120与大臂130通过第一关节160转动连接。大臂130与小臂140通过所述第二关节170转动连接。小臂140与旋转臂150通过第三关节180转动连接。第一关节160与第二关节170的回转轴线平行于重力方向,第三关节180的回转轴线垂直于重力方向。As shown in FIG. 1 , the orthopedic surgical robot of the preferred embodiment of the present invention includes a
上述骨科手术机器人中,第一关节160、第二关节170的回转轴线平行于重力方向,通过转动第一关节160和第二关节170以及移动升降组件120调整大臂130和小臂140的位置,可以使手术时,骨科手术器械覆盖所有需要进行手术操作的位置,提高了手术空间利用率。In the above-mentioned orthopedic surgical robot, the rotation axes of the
在本实施例中,升降组件120包括丝杆121、丝杆螺母123、连接件125和驱动机构127。丝杆螺母123旋于丝杆121。连接件125的一端固定于丝杆螺母123,另一端与大臂130转动连接。驱动机构127安装于支架110,丝杆121的一端与驱动机构127连接,另一端与支架110转动连接。第三关节180的回转轴线平行于小臂140的延伸方向。In this embodiment, the
上述实施例中,第一关节160、第二关节170的回转轴线平行于重力方向,第三关节180的回转轴线垂直于重力方向,医生进行操作时,大臂130、小臂140紧沿水平方向移动,旋转臂150沿轴转动。虽然升降组件120的运动沿竖直方向,但是升降组件120中采用了配备有丝杆螺母123的丝杆121作为运动轨道,即使机器人故障或误操作,也不会在重力方向有较大的回落,有效的避免了因机械手臂下落造成的手术工具损伤或医疗事故的发生。In the above embodiment, the rotation axes of the
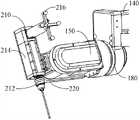
如图2、图3、图4和图5所示,骨科手术机器人还包括腕部组件210。腕部组件210通过第四关节220与旋转臂150远离第三关节180的一端转动连接。第四关节220的回转轴线垂直于旋转臂150的延伸方向。腕部组件210包括手术器械安装件212、俯仰臂214和标识件216。俯仰臂214通过第四关节220与旋转臂150相连,俯仰臂214可以以第四关节为轴作俯仰运动。手术器械安装件212安装于俯仰臂214的一端,标识件216安装于俯仰臂214远离手术器械安装件212的一端。手术器械安装件212用于安装骨科手术器械,标识件216用于在骨科手术机器人运动过程中对骨科手术器械的位置进行定位。As shown in FIG. 2 , FIG. 3 , FIG. 4 and FIG. 5 , the orthopedic surgical robot further includes a
在本实施例中,驱动机构127包括联轴器、多级减速箱、伺服电机和编码器。丝杠依次通过联轴器、多级减速箱与伺服电机的输出轴连接,编码器安装于伺服电机。伺服电机作为动力源,输出力矩和转速,经过多级减速箱减速,以增大驱动机构的输出力矩。联轴器将转速和力矩传递给丝杆,丝杆转动带动丝杆螺母的移动,进而完成升降组件的升降运动。编码器与手术机器人的控制系统相连接。编码器检测伺服电机的转角位移和角速度,以电信号的形式反馈给控制系统,控制系统经过处理,通过伺服电机的驱动电路调整伺服电机的转角位移和角速度。In this embodiment, the
在本实施例中,第一关节160包括第一编码器、第一伺服电机和第一谐波减速器。第一伺服电机安装于连接件125,第一编码器安装于第一伺服电机。第一谐波减速器包括第一波发生器、第一柔轮和第一钢轮。第一波发生器与第一伺服电机的输出轴连接,第一钢轮固定于连接件125,第一柔轮与大臂130连接。第一伺服电机输出转速和力矩,通过第一谐波减速器的减速,将运动传递给大臂130,实现大臂130的转动。第一编码器与手术机器人的控制系统相连接,将第一伺服电机的角速度和角位移转换成电信号并将该电信号传送给控制系统。In this embodiment, the
在本实施例中,第二关节170包括第二编码器、第二伺服电机和第二谐波减速器。第二伺服电机安装于小臂140。第二编码器安装于第二伺服电机。第二谐波减速器包括第二波发生器、第二柔轮和第二钢轮。第二波发生器与第二伺服电机的输出轴连接,第二钢轮固定于小臂140,第二柔轮与大臂130连接。第二伺服电机提供第二关节的转速和转矩,第二谐波减速器降低转速,增大转矩。第二编码器与手术机器人的控制系统相连接,将第二伺服电机的角速度和角位移转换成电信号并将该电信号传送给控制系统。In this embodiment, the second joint 170 includes a second encoder, a second servo motor and a second harmonic reducer. The second servo motor is mounted on the
在本实施例中,第三关节180和第四关节220均包括驱动件,分别用于驱动旋转臂150转动和俯仰臂212做俯仰运动。In this embodiment, both the third joint 180 and the fourth joint 220 include driving parts, which are respectively used to drive the
上述骨科手术机器人,设计为平面关节机器人设计形式,第一关节160、第二关节170的回转轴线平行于重力方向,通过转动第一关节160和第二关节170以及移动升降组件120调整大臂130和小臂140的位置,可以使手术时,骨科手术器械覆盖所有需要进行手术操作的位置,提高了手术空间利用率。同时,在拖拽机器人时,机器人的大臂130、小臂140与旋转臂150和地面的距离不变,可以随意拖拽而不会对病人有任何的安全隐患,大大提高了手术的安全性,而且平面关节机器人还有工作空间大,定位精确、操作简单的特点。The above-mentioned orthopedic surgery robot is designed in the form of a planar joint robot. The rotation axes of the first joint 160 and the second joint 170 are parallel to the direction of gravity. And the position of the
另外,骨科手术机器人具有升降组件120、第一关节160、第二关节170、第三关节180和第四关节210五个自由度。其中,升降组件120、第一关节160和第二关节170用于调整骨科手术机器人的末端位置。第三关节180和第四关节210用于调整骨科手术机器人的末端姿态。在配合医生手术时,拖拽方便,五个自由度可以保证将骨科手术器械调整到工作范围内的任何位置,可以实现工作范围内的任何姿态,完全满足医生手术的需求。In addition, the orthopedic surgical robot has five degrees of freedom of the lifting
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。The above-mentioned embodiments only express several implementation modes of the present invention, and the description thereof is relatively specific and detailed, but should not be construed as limiting the patent scope of the present invention. It should be pointed out that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention, and these all belong to the protection scope of the present invention. Therefore, the protection scope of the patent for the present invention should be based on the appended claims.
Claims (9)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210108847.2ACN102764157B (en) | 2012-04-13 | 2012-04-13 | Robot for orthopaedic surgery |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210108847.2ACN102764157B (en) | 2012-04-13 | 2012-04-13 | Robot for orthopaedic surgery |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102764157Atrue CN102764157A (en) | 2012-11-07 |
| CN102764157B CN102764157B (en) | 2014-12-10 |
Family
ID=47091895
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201210108847.2AActiveCN102764157B (en) | 2012-04-13 | 2012-04-13 | Robot for orthopaedic surgery |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN102764157B (en) |
Cited By (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104783900A (en)* | 2015-04-03 | 2015-07-22 | 中国科学院深圳先进技术研究院 | Follow-up type nasal endoscope operation auxiliary robot |
| CN105147393A (en)* | 2015-08-19 | 2015-12-16 | 哈尔滨工业大学 | Minimally invasive robot mirror-holding mechanical arm |
| CN105193502A (en)* | 2014-06-23 | 2015-12-30 | 上海艾迅医疗设备有限公司 | Surgical operation robot |
| CN105476713A (en)* | 2015-12-28 | 2016-04-13 | 苏州点合医疗科技有限公司 | Orthopedic operation robot based on collet receding sleeve type anti-twining minimally-invasive decompression mechanical hand |
| CN105997250A (en)* | 2016-04-27 | 2016-10-12 | 中国科学院深圳先进技术研究院 | Grinding device for spine vertebral plate |
| CN106175935A (en)* | 2016-06-29 | 2016-12-07 | 微创(上海)医疗机器人有限公司 | Mechanical arm and orthopedic robot |
| CN106236276A (en)* | 2016-09-28 | 2016-12-21 | 微创(上海)医疗机器人有限公司 | Surgical robot system |
| CN106344158A (en)* | 2016-09-21 | 2017-01-25 | 东莞市联洲知识产权运营管理有限公司 | A surgical robot with lifting rollers on the bottom |
| CN106361434A (en)* | 2016-09-21 | 2017-02-01 | 东莞市联洲知识产权运营管理有限公司 | Surgical robot with multidimensional motional cutter |
| CN107320192A (en)* | 2017-07-31 | 2017-11-07 | 成都中科博恩思医学机器人有限公司 | The operating theater instruments and operating robot of operating robot |
| CN107334532A (en)* | 2017-07-31 | 2017-11-10 | 成都中科博恩思医学机器人有限公司 | Operating robot |
| WO2017219208A1 (en)* | 2016-06-20 | 2017-12-28 | 深圳市鑫君特智能医疗器械有限公司 | Intelligent bone drill of orthopedic surgery robot |
| CN108652744A (en)* | 2018-04-08 | 2018-10-16 | 石佳明 | A kind of bone surgery auxiliary manipulator |
| CN108836484A (en)* | 2015-02-11 | 2018-11-20 | 工程服务公司 | Operating robot |
| CN108888343A (en)* | 2018-05-04 | 2018-11-27 | 东莞市联洲知识产权运营管理有限公司 | Medical treatment operation is with diversified manipulator of adjusting that has adsorption apparatus structure |
| CN108908315A (en)* | 2018-09-17 | 2018-11-30 | 深圳市越疆科技有限公司 | Forearm and articulated robot |
| CN110200704A (en)* | 2019-07-10 | 2019-09-06 | 重庆金山科技(集团)有限公司 | Straight-line motion mechanism and operation trolley |
| CN110384555A (en)* | 2018-04-19 | 2019-10-29 | 中国科学院深圳先进技术研究院 | Videoendoscopic surgery robot is held based on distal center movement mechanism |
| CN110464464A (en)* | 2019-08-06 | 2019-11-19 | 复旦大学附属肿瘤医院 | A kind of urological surgery robot arm |
| CN111603244A (en)* | 2020-07-03 | 2020-09-01 | 上海市胸科医院 | a surgical robot |
| CN112353495A (en)* | 2020-10-29 | 2021-02-12 | 北京唯迈医疗设备有限公司 | Intervene surgical robot arm system |
| CN112914729A (en)* | 2021-03-25 | 2021-06-08 | 江苏集萃复合材料装备研究所有限公司 | Intelligent auxiliary positioning bone surgery robot system and operation method thereof |
| CN113288427A (en)* | 2020-02-21 | 2021-08-24 | 中国科学院沈阳自动化研究所 | Suspension positioning mechanical arm and control method |
| CN113616261A (en)* | 2021-09-15 | 2021-11-09 | 常州安康医疗器械有限公司 | Electric endoscope anastomat with high automation degree and automatic control assembly thereof |
| CN113995668A (en)* | 2021-12-13 | 2022-02-01 | 沈阳天仁合一科技有限公司 | Intelligent moxibustion instrument |
| CN114012780A (en)* | 2021-12-13 | 2022-02-08 | 沈阳天仁合一科技有限公司 | Rotating arm with displacement compensation |
| CN114098978A (en)* | 2021-11-12 | 2022-03-01 | 艺柏湾医疗科技(上海)有限公司 | Robotic arm for minimally invasive surgery |
| CN115381555A (en)* | 2022-08-10 | 2022-11-25 | 中国中医科学院望京医院(中国中医科学院骨伤科研究所) | A special orthopedic surgical robot for specific parts |
| TWI823152B (en)* | 2021-10-01 | 2023-11-21 | 財團法人金屬工業研究發展中心 | Optical positioning probe cart |
| CN117442238A (en)* | 2023-12-25 | 2024-01-26 | 中国科学院自动化研究所 | A portable ultrasonic robot scanning system |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1417004A (en)* | 2002-11-26 | 2003-05-14 | 北京航空航天大学 | Five-coardinate space positioning robot mechanism |
| CN1457747A (en)* | 2003-05-28 | 2003-11-26 | 天津大学 | Mechanical arm used in microsurgery operation robot |
| CN2645862Y (en)* | 2003-10-29 | 2004-10-06 | 中国科学院自动化研究所 | Mobile mechanical arm system |
| CN1586831A (en)* | 2004-07-09 | 2005-03-02 | 北京理工大学 | Six-freedom remote control arm with gravity compensation and length regulation |
| CN1711976A (en)* | 2005-07-21 | 2005-12-28 | 复旦大学 | A Surgical Navigation Tool |
| CN1798638A (en)* | 2003-06-13 | 2006-07-05 | Abb公司 | Robotic arm with a wrist frame movably mounted by a holding device |
| CN2796972Y (en)* | 2005-04-04 | 2006-07-19 | 天津市华志计算机应用有限公司 | Structure of fire freedom space location robot |
| CN101160104A (en)* | 2005-02-22 | 2008-04-09 | 马科外科公司 | Haptic guidance system and method |
| CN101862223A (en)* | 2010-06-24 | 2010-10-20 | 中国科学院深圳先进技术研究院 | surgical robot |
| CN202143653U (en)* | 2011-05-09 | 2012-02-15 | 无锡佑仁科技有限公司 | Minimally invasive vascular intervention operation robot |
- 2012
- 2012-04-13CNCN201210108847.2Apatent/CN102764157B/enactiveActive
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1417004A (en)* | 2002-11-26 | 2003-05-14 | 北京航空航天大学 | Five-coardinate space positioning robot mechanism |
| CN1457747A (en)* | 2003-05-28 | 2003-11-26 | 天津大学 | Mechanical arm used in microsurgery operation robot |
| CN1798638A (en)* | 2003-06-13 | 2006-07-05 | Abb公司 | Robotic arm with a wrist frame movably mounted by a holding device |
| CN2645862Y (en)* | 2003-10-29 | 2004-10-06 | 中国科学院自动化研究所 | Mobile mechanical arm system |
| CN1586831A (en)* | 2004-07-09 | 2005-03-02 | 北京理工大学 | Six-freedom remote control arm with gravity compensation and length regulation |
| CN101160104A (en)* | 2005-02-22 | 2008-04-09 | 马科外科公司 | Haptic guidance system and method |
| CN2796972Y (en)* | 2005-04-04 | 2006-07-19 | 天津市华志计算机应用有限公司 | Structure of fire freedom space location robot |
| CN1711976A (en)* | 2005-07-21 | 2005-12-28 | 复旦大学 | A Surgical Navigation Tool |
| CN101862223A (en)* | 2010-06-24 | 2010-10-20 | 中国科学院深圳先进技术研究院 | surgical robot |
| CN202143653U (en)* | 2011-05-09 | 2012-02-15 | 无锡佑仁科技有限公司 | Minimally invasive vascular intervention operation robot |
Non-Patent Citations (2)
| Title |
|---|
| 刘达等: "面向微创手术的医疗外科机器人构型综合", 《机器人》* |
| 车仁炜等: "五自由度康复机械手臂的设计", 《机械设计》* |
Cited By (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105193502A (en)* | 2014-06-23 | 2015-12-30 | 上海艾迅医疗设备有限公司 | Surgical operation robot |
| CN108836484A (en)* | 2015-02-11 | 2018-11-20 | 工程服务公司 | Operating robot |
| CN104783900A (en)* | 2015-04-03 | 2015-07-22 | 中国科学院深圳先进技术研究院 | Follow-up type nasal endoscope operation auxiliary robot |
| CN104783900B (en)* | 2015-04-03 | 2017-02-22 | 中国科学院深圳先进技术研究院 | Follow-up type nasal endoscope operation auxiliary robot |
| CN105147393B (en)* | 2015-08-19 | 2017-06-20 | 哈尔滨工业大学 | A kind of minimally invasive robot holds mirror mechanical arm |
| CN105147393A (en)* | 2015-08-19 | 2015-12-16 | 哈尔滨工业大学 | Minimally invasive robot mirror-holding mechanical arm |
| CN105476713A (en)* | 2015-12-28 | 2016-04-13 | 苏州点合医疗科技有限公司 | Orthopedic operation robot based on collet receding sleeve type anti-twining minimally-invasive decompression mechanical hand |
| CN105997250A (en)* | 2016-04-27 | 2016-10-12 | 中国科学院深圳先进技术研究院 | Grinding device for spine vertebral plate |
| CN105997250B (en)* | 2016-04-27 | 2018-11-20 | 中国科学院深圳先进技术研究院 | A kind of spinal lamina grinding attachment |
| WO2017219208A1 (en)* | 2016-06-20 | 2017-12-28 | 深圳市鑫君特智能医疗器械有限公司 | Intelligent bone drill of orthopedic surgery robot |
| CN106175935A (en)* | 2016-06-29 | 2016-12-07 | 微创(上海)医疗机器人有限公司 | Mechanical arm and orthopedic robot |
| WO2018000871A1 (en)* | 2016-06-29 | 2018-01-04 | 微创(上海)医疗机器人有限公司 | Robotic arm and robot for orthopedics |
| CN106175935B (en)* | 2016-06-29 | 2019-01-22 | 微创(上海)医疗机器人有限公司 | Mechanical arm and orthopedic robot |
| CN106361434A (en)* | 2016-09-21 | 2017-02-01 | 东莞市联洲知识产权运营管理有限公司 | Surgical robot with multidimensional motional cutter |
| CN106344158A (en)* | 2016-09-21 | 2017-01-25 | 东莞市联洲知识产权运营管理有限公司 | A surgical robot with lifting rollers on the bottom |
| WO2018059039A1 (en)* | 2016-09-28 | 2018-04-05 | 微创(上海)医疗机器人有限公司 | Surgical robot system |
| CN106236276A (en)* | 2016-09-28 | 2016-12-21 | 微创(上海)医疗机器人有限公司 | Surgical robot system |
| CN107320192A (en)* | 2017-07-31 | 2017-11-07 | 成都中科博恩思医学机器人有限公司 | The operating theater instruments and operating robot of operating robot |
| CN107334532A (en)* | 2017-07-31 | 2017-11-10 | 成都中科博恩思医学机器人有限公司 | Operating robot |
| CN108652744A (en)* | 2018-04-08 | 2018-10-16 | 石佳明 | A kind of bone surgery auxiliary manipulator |
| CN110384555A (en)* | 2018-04-19 | 2019-10-29 | 中国科学院深圳先进技术研究院 | Videoendoscopic surgery robot is held based on distal center movement mechanism |
| CN108888343A (en)* | 2018-05-04 | 2018-11-27 | 东莞市联洲知识产权运营管理有限公司 | Medical treatment operation is with diversified manipulator of adjusting that has adsorption apparatus structure |
| CN108908315A (en)* | 2018-09-17 | 2018-11-30 | 深圳市越疆科技有限公司 | Forearm and articulated robot |
| CN110200704B (en)* | 2019-07-10 | 2023-12-22 | 重庆金山医疗机器人有限公司 | Linear motion mechanism and operation trolley |
| CN110200704A (en)* | 2019-07-10 | 2019-09-06 | 重庆金山科技(集团)有限公司 | Straight-line motion mechanism and operation trolley |
| CN110464464A (en)* | 2019-08-06 | 2019-11-19 | 复旦大学附属肿瘤医院 | A kind of urological surgery robot arm |
| CN110464464B (en)* | 2019-08-06 | 2024-07-30 | 复旦大学附属肿瘤医院 | Mechanical arm of urological operation robot |
| CN113288427A (en)* | 2020-02-21 | 2021-08-24 | 中国科学院沈阳自动化研究所 | Suspension positioning mechanical arm and control method |
| CN111603244A (en)* | 2020-07-03 | 2020-09-01 | 上海市胸科医院 | a surgical robot |
| CN112353495A (en)* | 2020-10-29 | 2021-02-12 | 北京唯迈医疗设备有限公司 | Intervene surgical robot arm system |
| CN112353495B (en)* | 2020-10-29 | 2021-08-10 | 北京唯迈医疗设备有限公司 | Intervene surgical robot arm system |
| CN112914729A (en)* | 2021-03-25 | 2021-06-08 | 江苏集萃复合材料装备研究所有限公司 | Intelligent auxiliary positioning bone surgery robot system and operation method thereof |
| CN113616261A (en)* | 2021-09-15 | 2021-11-09 | 常州安康医疗器械有限公司 | Electric endoscope anastomat with high automation degree and automatic control assembly thereof |
| TWI823152B (en)* | 2021-10-01 | 2023-11-21 | 財團法人金屬工業研究發展中心 | Optical positioning probe cart |
| US12324642B2 (en) | 2021-11-12 | 2025-06-10 | Eabmed Science And Technology (Shanghai) Co., Ltd. | Robotic arm for minimally invasive surgery |
| CN114098978A (en)* | 2021-11-12 | 2022-03-01 | 艺柏湾医疗科技(上海)有限公司 | Robotic arm for minimally invasive surgery |
| CN113995668A (en)* | 2021-12-13 | 2022-02-01 | 沈阳天仁合一科技有限公司 | Intelligent moxibustion instrument |
| CN113995668B (en)* | 2021-12-13 | 2023-08-25 | 沈阳天仁合一科技有限公司 | Intelligent moxibustion instrument |
| CN114012780B (en)* | 2021-12-13 | 2023-08-08 | 沈阳天仁合一科技有限公司 | Rotating arm with displacement compensation |
| CN114012780A (en)* | 2021-12-13 | 2022-02-08 | 沈阳天仁合一科技有限公司 | Rotating arm with displacement compensation |
| CN115381555A (en)* | 2022-08-10 | 2022-11-25 | 中国中医科学院望京医院(中国中医科学院骨伤科研究所) | A special orthopedic surgical robot for specific parts |
| CN117442238A (en)* | 2023-12-25 | 2024-01-26 | 中国科学院自动化研究所 | A portable ultrasonic robot scanning system |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102764157B (en) | 2014-12-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102764157B (en) | Robot for orthopaedic surgery | |
| CN102764158B (en) | Surgical robot | |
| CN101862223B (en) | Operating robot | |
| CN103934831B (en) | Robot | |
| CN103565529B (en) | Robot-assisted multifunctional instrument arm for minimally invasive surgery | |
| CN102764156B (en) | Surgical operation robot | |
| US10189164B2 (en) | Robot, control device, and robot system | |
| CN108000477A (en) | A kind of complete main passive compliance robot of pose and screw valve method using the robot | |
| CN104546147A (en) | RCM mechanism for mechanical arm of laparoscopic minimally invasive surgical robot | |
| CN104116547A (en) | Low-friction low-inertia surgical instrument for minimally invasive surgical robot | |
| JP2015085427A (en) | Each axis angle determination method for 6-axis robot and controller for 6-axis robot | |
| JP2018187749A (en) | robot | |
| JP2016203332A (en) | Robot and robot system | |
| EP3539727B1 (en) | Working device and double-arm type working device | |
| CN110053072A (en) | A kind of composite mechanical arm mechanism and its method for carrying out material carrying | |
| CN107199562B (en) | Robot control device and robot control method | |
| CN205885526U (en) | Nimble operation shoulder joint | |
| JP2017087302A (en) | Control device, robot and robot system | |
| JP6582520B2 (en) | robot | |
| JP6277672B2 (en) | robot | |
| JP2016203344A (en) | robot | |
| CN106002986A (en) | A specific palletizing robot with double vertical slides | |
| JP2017131969A (en) | robot | |
| CN106618735B (en) | Collaborative interaction robot for surgical operation | |
| KR101454851B1 (en) | Driving device and robot having the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |