CN102729254A - Myoelectricity control method for remote-control robot based on touch presence feeling - Google Patents
Myoelectricity control method for remote-control robot based on touch presence feelingDownload PDFInfo
- Publication number
- CN102729254A CN102729254ACN2012102318823ACN201210231882ACN102729254ACN 102729254 ACN102729254 ACN 102729254ACN 2012102318823 ACN2012102318823 ACN 2012102318823ACN 201210231882 ACN201210231882 ACN 201210231882ACN 102729254 ACN102729254 ACN 102729254A
- Authority
- CN
- China
- Prior art keywords
- carpi ulnaris
- extensor
- surface electromyogram
- electromyogram signal
- musculus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription29
- 230000000875corresponding effectEffects0.000claimsabstractdescription10
- 210000003205muscleAnatomy0.000claimsdescription52
- 210000000707wristAnatomy0.000claimsdescription16
- 230000004936stimulating effectEffects0.000claimsdescription11
- 210000001519tissueAnatomy0.000claimsdescription6
- 238000001914filtrationMethods0.000claimsdescription4
- 230000008447perceptionEffects0.000claimsdescription4
- 210000003169central nervous systemAnatomy0.000claimsdescription3
- 210000005036nerveAnatomy0.000claimsdescription3
- 210000001640nerve endingAnatomy0.000claimsdescription3
- 210000000653nervous systemAnatomy0.000claimsdescription3
- 230000000694effectsEffects0.000claimsdescription2
- 238000005452bendingMethods0.000claims1
- 230000000638stimulationEffects0.000claims1
- 230000003993interactionEffects0.000abstractdescription9
- 238000004088simulationMethods0.000abstract1
- 238000002567electromyographyMethods0.000description54
- 230000002452interceptive effectEffects0.000description6
- 230000003183myoelectrical effectEffects0.000description6
- 238000012545processingMethods0.000description4
- 238000011160researchMethods0.000description3
- 230000000007visual effectEffects0.000description3
- 238000013473artificial intelligenceMethods0.000description2
- 230000002964excitative effectEffects0.000description2
- 230000003044adaptive effectEffects0.000description1
- 210000000078clawAnatomy0.000description1
- 238000000354decomposition reactionMethods0.000description1
- 230000007812deficiencyEffects0.000description1
- 238000011161developmentMethods0.000description1
- 238000010586diagramMethods0.000description1
- 230000008846dynamic interplayEffects0.000description1
- 230000002708enhancing effectEffects0.000description1
- 230000007613environmental effectEffects0.000description1
- 239000002360explosiveSubstances0.000description1
- 238000003909pattern recognitionMethods0.000description1
- 230000035807sensationEffects0.000description1
- 230000015541sensory perception of touchEffects0.000description1
- 238000000926separation methodMethods0.000description1
- 238000012549trainingMethods0.000description1
- 210000001364upper extremityAnatomy0.000description1
Images



Landscapes
- Prostheses (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及一种遥操作机器人控制方法,特别地,涉及基于触觉临场感并采用肌电控制的遥操作机器人控制方法。The present invention relates to a control method for a teleoperated robot, in particular to a control method for a teleoperated robot based on tactile presence and using myoelectric control.
背景技术Background technique
全自主方式工作的机器人一直是机器人学者所追求的目标,然而,由于人工智能、传感和控制水平的限制,工作在复杂或未知环境下的全自主型机器人是目前难以达到的。近年来,随着核能技术、空间技术和海洋技术的迅速发展,迫切需要大量在危险或有害环境下工作的机器人。许多人工智能专家和机器人学研究者认为,目前机器人的研究重点应由全自主式技术转向交互技术,就是要在研究中重新考虑“人”的地位,将人的智能和机器人的智能有机结合起来,这样的研究更具现实意义。Fully autonomous robots have always been the goal pursued by roboticists. However, due to the limitations of artificial intelligence, sensing and control levels, fully autonomous robots working in complex or unknown environments are currently difficult to achieve. In recent years, with the rapid development of nuclear energy technology, space technology and marine technology, there is an urgent need for a large number of robots that work in dangerous or harmful environments. Many artificial intelligence experts and robotics researchers believe that the current focus of robot research should shift from fully autonomous technology to interactive technology, that is, to reconsider the status of "human" in research and organically combine human intelligence and robot intelligence. , such research is more realistic.
遥操作系统就是一个操作者-机器人的共生交互系统,其目的就是帮操作者完成对远地环境的遥作(teleoperation)和遥知(teleperception)。其中遥作是操作者对远地机器人的遥操作,将人的命令或动作传递给机器人;遥知就是远端机器人与环境信息交互的反馈,构成遥操作系统的控制回路。The teleoperation system is an operator-robot symbiotic interactive system, and its purpose is to help the operator complete teleoperation and teleperception of the remote environment. Among them, teleoperation is the remote operation of the operator on the remote robot, and the human command or action is transmitted to the robot; teleknowledge is the feedback of the interaction between the remote robot and the environmental information, which constitutes the control loop of the teleoperation system.
遥作(teleoperation)要求通过一种输入接口将操作者的指令传达给机器人。目前遥作输入接口有很多,但多数输入接口仍然存在一定问题,如输入不自然、方式单一、信息存在多义性,输入技术已成为制约人机交互的瓶颈。而且,大部分输入接口都涉及到复杂的物理结构或者感知系统,操作者需要熟悉、了解这个复杂的接口,在作业过程中可能会有难以适应的感觉。因此如何引入新的遥作接口方式,使操作者更加方便自如地将指令传达给机器人,增强主动的、自然的人机交互是“遥作”方面需要解决的问题。考虑到获取操作者动作最直接的信号就是从人体直接获取信息,利用操作者上肢的表面肌电信号(surface electromyogram, SEMG)来控制远端的机器人,这样的人机接口对操作者不会构成操作上的负担,无需特殊学习和训练,而且操作者在作业过程中不受束缚,操作感好。这种肌电遥操作方式提供了人机交互的新渠道,增进了人机交互的自然性和主动性。Teleoperation requires that the operator's instructions be communicated to the robot through an input interface. At present, there are many remote operation input interfaces, but most of the input interfaces still have certain problems, such as unnatural input, single method, and ambiguity in information. Input technology has become a bottleneck restricting human-computer interaction. Moreover, most input interfaces involve complex physical structures or perception systems. Operators need to be familiar with and understand this complex interface, and may feel difficult to adapt to during the operation. Therefore, how to introduce a new remote operation interface, so that the operator can more conveniently and freely convey instructions to the robot, and enhance active and natural human-computer interaction is a problem that needs to be solved in the aspect of "remote operation". Considering that the most direct signal to obtain the operator's action is to obtain information directly from the human body, using the surface electromyogram (SEMG) of the operator's upper limbs to control the remote robot, such a human-machine interface will not pose a threat to the operator. The burden on operation does not require special learning and training, and the operator is not restrained during the operation, and the operation feeling is good. This myoelectric teleoperation method provides a new channel for human-computer interaction and enhances the naturalness and initiative of human-computer interaction.
遥知(teleperception)方面,从增强遥操作系统操作者的感知和系统对操作者的亲近性出发,人们提出了临场感的概念,并将临场感技术作为遥操作系统交互技术的核心。其本质就是将远地从机器人感知到的机器人和环境的交互信息以及环境的信息(包括视觉、触觉、听觉等信息)实时地、真实地反馈给操作者,使操作者产生身临其境的感觉,从而有效地感知环境及控制从机器人完成复杂的作业任务。工作在交互方式下具有临场感的遥操作系统是在危险、复杂或非确定环境下完成作业任务的有效手段。具有触觉传感和反馈的遥控作业系统能有效地增强操作者对远端机器人手与物体接触情况的感知,以及被抓握物体的表面物理特征,从而能快速准确地完成作业任务。目前,遥控作业中视觉临场感技术用得较多,但通过视觉并不能准确地得到遥远处从机械手与环境作用的全部信息,由于机器人手爪通常会间断性地遮挡机器人的视线,因此视觉信息只能在手爪操作之前或者之后出现,而机器人触觉则可以在整个操作过程中实时提供具体的触觉信息如机器人手与被抓物体何时开始接触、机器人手与物体接触力的大小、甚至接触的形状等。在跟踪抓取、精细操作中,在存在无照明、狭窄空间等视觉障碍时,机器人的触觉能力直接决定着遥控机器人作业系统的操作性能。In terms of teleperception, starting from enhancing the perception of the operator of the telesystem and the closeness of the system to the operator, people put forward the concept of telepresence, and regard the technology of telepresence as the core of the telesystem interaction technology. Its essence is to feed back the interactive information between the robot and the environment and the information of the environment (including visual, tactile, auditory, etc.) perceived by the robot remotely to the operator in real time and in a real-time manner, so that the operator can have an immersive experience. Sensation, so as to effectively perceive the environment and control the completion of complex tasks from the robot. The teleoperation system with a sense of presence in the interactive mode is an effective means to complete tasks in dangerous, complex or uncertain environments. The remote operation system with tactile sensing and feedback can effectively enhance the operator's perception of the contact between the remote robot hand and the object, as well as the surface physical characteristics of the grasped object, so that the operation task can be completed quickly and accurately. At present, visual presence technology is widely used in remote control operations, but it is not possible to accurately obtain all information about the interaction between the manipulator and the environment at a remote place through vision. It can only appear before or after the gripper operation, while the robot tactile sense can provide specific tactile information in real time during the entire operation process, such as when the robot hand and the grasped object start to contact, the magnitude of the contact force between the robot hand and the object, and even the contact force. shape etc. In tracking and grasping and fine operation, when there are visual obstacles such as no lighting and narrow space, the tactile ability of the robot directly determines the operational performance of the remote control robot operation system.
发明内容Contents of the invention
本发明的目的就是针对现有技术的不足,将遥控机器人不可或缺的两方面“遥作”和“遥知”通过肌电控制和触觉临场感融合在一起,提出了一种新颖的人机交互方式。以操控者人手为动作模仿对象,通过采集手臂皮肤表面肌电信号,经模式识别判断出相应的多个动作模式,控制机器人手完成对应动作,具有操控自然的特点;在作业过程中,操控者可根据触觉临场感来掌握和调节手部动作,实现触觉临场反馈式作业。这种交互方式可以使操作者真实地感觉到机器人与被操作物体的动态相互作用,就象操作者自己的手在操作物体一样,这有助于操作者完成复杂精密的作业。The purpose of the present invention is to address the deficiencies in the prior art, to integrate the two indispensable aspects of remote control robots, "remote operation" and "remote knowledge", through myoelectric control and tactile presence, and to propose a novel man-machine interactive mode. Taking the human hand of the operator as the action imitation object, by collecting the skin surface electromyography signals of the arm, the corresponding multiple action modes are judged through pattern recognition, and the robot hand is controlled to complete the corresponding action, which has the characteristics of natural manipulation; during the operation process, the operator Hand movements can be mastered and adjusted according to the tactile presence to realize tactile presence feedback operation. This interactive method can make the operator truly feel the dynamic interaction between the robot and the object being operated, just like the operator's own hand is operating the object, which helps the operator to complete complex and precise operations.
为了实现以上目的,本发明方法主要包括以下步骤:In order to achieve the above object, the inventive method mainly comprises the following steps:
步骤一,获取操作者手臂指伸肌、尺侧腕伸肌、尺侧腕屈肌三路表面肌电信号。具体是:首先通过肌电信号采集仪采集指伸肌、尺侧腕伸肌、尺侧腕屈肌三路表面肌电信号,再采用空域相关滤波方法对含有干扰噪声的肌电信号进行消噪。Step 1: Obtain three-channel surface electromyographic signals of the operator's arm finger extensor, extensor carpi ulnaris, and flexor carpi ulnaris. Specifically: first, the three-way surface electromyography signals of finger extensor, carpi ulnaris extensor and flexor carpi ulnaris are collected by the electromyographic signal acquisition instrument, and then the spatial correlation filtering method is used to denoise the electromyographic signals containing interference noise .
步骤二,根据操作者手臂指伸肌、尺侧腕伸肌、尺侧腕屈肌三路表面肌电信号识别出操作者的操作动作,具体动作包括伸腕、屈腕、展拳或握拳。Step 2: Identify the operator's operation actions based on the three-way surface electromyographic signals of the operator's arm finger extensor, extensor carpi ulnaris, and flexor carpi ulnaris. The specific actions include wrist extension, wrist flexion, fist opening or fist clenching.
识别方法如下:The identification method is as follows:
无操作动作时指伸肌、尺侧腕伸肌、尺侧腕屈肌三路表面肌电信号的平均功率,分别记为 


若指伸肌的表面肌电信号大于
若尺侧腕伸肌的表面肌电信号大于

若尺侧腕屈肌的表面肌电信号大于

若指伸肌表面肌电信号弱、尺侧腕伸肌表面肌电信号强、尺侧腕屈肌表面肌电信号弱,识别结果为伸腕动作;If the surface EMG signal of the finger extensor muscle is weak, the surface EMG signal of the extensor carpi ulnaris muscle is strong, and the surface EMG signal of the flexor carpi ulnaris muscle is weak, the recognition result is wrist extension;
若指伸肌表面肌电信号弱、尺侧腕伸肌表面肌电信号弱、尺侧腕屈肌表面肌电信号强,识别结果为屈腕动作;If the surface EMG signal of the finger extensor muscle is weak, the surface EMG signal of the extensor carpi ulnaris muscle is weak, and the surface EMG signal of the flexor carpi ulnaris muscle is strong, the recognition result is wrist flexion;
若指伸肌表面肌电信号强、尺侧腕伸肌表面肌电信号强、尺侧腕屈肌表面肌电信号弱,识别结果为展拳动作;If the surface EMG signal of the finger extensor muscle is strong, the surface EMG signal of the extensor carpi ulnaris muscle is strong, and the surface EMG signal of the flexor carpi ulnaris muscle is weak, the recognition result is a fist movement;
若指伸肌表面肌电信号强、尺侧腕伸肌表面肌电信号强、尺侧腕屈肌表面肌电信号强,识别结果为握拳动作;If the surface EMG signal of the finger extensor muscle is strong, the surface EMG signal of the extensor carpi ulnaris muscle is strong, and the surface EMG signal of the flexor carpi ulnaris muscle is strong, the recognition result is a fist movement;
若指伸肌表面肌电信号弱、尺侧腕伸肌表面肌电信号弱、尺侧腕屈肌表面肌电信号弱,识别结果为不动作。If the surface EMG signal of the finger extensor muscle is weak, the surface EMG signal of the extensor carpi ulnaris muscle is weak, and the surface EMG signal of the flexor carpi ulnaris muscle is weak, the recognition result is no action.
步骤三,把步骤二的识别结果转化为机器人控制指令,控制机器人手操作相应的动作。Step 3: convert the recognition result of step 2 into robot control instructions, and control the corresponding actions of the robot hand.
步骤四,机器人手合拢的作业过程中,通过安装于机器人手的触觉传感器,将现场触觉信息反馈给操控者,实现触觉临场感。Step 4: During the operation process of closing the robot hand, the on-site tactile information is fed back to the operator through the tactile sensor installed on the robot hand to realize the sense of tactile presence.
所述的触觉临场感,具体是:当触觉传感器触碰被抓工件时,由触觉处理电路完成触觉信号处理,并通过刺激电路发送到刺激电极,刺激电极作用于指端的神经和肌体组织,在刺激电流的作用下,指端电触点下肌体及神经末梢等兴奋组织的细胞出现特征性生物电信号,这些生物电信号上传至中枢神经系统后,再经神经系统感知,就可使操作者产生相应电触点处的触觉意识,从而实现触觉临场感。The tactile presence is specifically: when the tactile sensor touches the grasped workpiece, the tactile signal processing is completed by the tactile processing circuit, and is sent to the stimulating electrode through the stimulating circuit, and the stimulating electrode acts on the nerves and body tissues at the fingertips. Under the action of stimulating current, the cells of the excitatory tissue such as the human body and nerve endings under the electric contact of the fingertips appear characteristic bioelectrical signals. After these bioelectrical signals are uploaded to the central nervous system, and then sensed by the nervous system, the operator can Haptic presence is achieved by generating tactile awareness at the corresponding electrical contacts.
步骤五,操控者可根据触觉临场感来掌握自己的手部动作,并根据操作者的肌电信号重复步骤一至步骤五控制机器人手。In step five, the operator can control his hand movements according to the sense of tactile presence, and repeat steps one to five to control the robot hand according to the operator's myoelectric signal.
本发明可以增强遥操作机器人的人机交互深度、准确性及适应能力,对解决工作在危险或有害环境下的遥控机器人,如核工业装配中抓取易形变、易爆的物体,有很好的应用前景。The present invention can enhance the human-computer interaction depth, accuracy and adaptability of the remote operation robot, and is very good for solving remote control robots working in dangerous or harmful environments, such as grasping deformable and explosive objects in nuclear industry assembly. application prospects.
附图说明Description of drawings
图1为本发明的系统方案图;Fig. 1 is a system scheme diagram of the present invention;
图2为根据三路肌电信号强弱判断动作模式的流程图;Fig. 2 is a flow chart of judging the action mode according to the intensity of the three-way myoelectric signal;
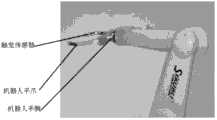
图3为史陶比尔TX90L型工业机器人;Figure 3 is the Stäubli TX90L industrial robot;
图4为触觉临场感系统。Figure 4 shows the tactile presence system.
具体实施方式Detailed ways
下面结合附图对本发明的实施作详细说明:本实施在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程。The implementation of the present invention will be described in detail below in conjunction with the accompanying drawings: this implementation is carried out on the premise of the technical solution of the present invention, and detailed implementation methods and specific operation processes are provided.
如图1所示,本实施包括如下步骤:As shown in Figure 1, this implementation includes the following steps:
步骤一,获取操作者手臂指伸肌、尺侧腕伸肌、尺侧腕屈肌三路表面肌电信号。具体是:首先通过肌电信号采集仪采集指伸肌、尺侧腕伸肌、尺侧腕屈肌三路表面肌电信号,再采用空域相关滤波方法对含有干扰噪声的肌电信号进行消噪。Step 1: Obtain three-channel surface electromyographic signals of the operator's arm finger extensor, extensor carpi ulnaris, and flexor carpi ulnaris. Specifically: first, the three-way surface electromyography signals of finger extensor, carpi ulnaris extensor and flexor carpi ulnaris are collected by the electromyographic signal acquisition instrument, and then the spatial correlation filtering method is used to denoise the electromyographic signals containing interference noise .
由于手部未动作时采集的表面肌电信号对应为信号的噪声,若对该含有噪声的表面肌电信号进行多尺度小波分解,各尺度的高频系数的首尾部分对应手部无动作时的表面肌电信号,因此可以用手部无动作时的SEMG信号的高频系数来估计各层的噪声能量门限。取表面肌电信号小波变换高频系数的前



其中



空域相关法利用真实信号的小波系数在各尺度上的相关性,使得小尺度上的真实信号的小波系数得以突显,从而实现了真实信号的小波系数与噪声小波系数的分离,取得了比较好的滤波效果。The spatial domain correlation method uses the correlation of the wavelet coefficients of the real signal on each scale to highlight the wavelet coefficients of the real signal on a small scale, thereby realizing the separation of the wavelet coefficients of the real signal and the noise wavelet coefficients, and has achieved better results. filter effect.
步骤二,根据操作者手臂指伸肌、尺侧腕伸肌、尺侧腕屈肌三路表面肌电信号识别出操作者的操作动作,具体动作包括伸腕、屈腕、展拳或握拳。Step 2: Identify the operator's operation actions based on the three-way surface electromyographic signals of the operator's arm finger extensor, extensor carpi ulnaris, and flexor carpi ulnaris. The specific actions include wrist extension, wrist flexion, fist opening or fist clenching.
识别方法如下:The identification method is as follows:
无操作动作时指伸肌、尺侧腕伸肌、尺侧腕屈肌三路表面肌电信号的平均功率,分别记为


若指伸肌的表面肌电信号大于

若尺侧腕伸肌的表面肌电信号大于

若尺侧腕屈肌的表面肌电信号大于

若指伸肌表面肌电信号弱、尺侧腕伸肌表面肌电信号强、尺侧腕屈肌表面肌电信号弱,识别结果为伸腕动作。If the surface EMG signal of the finger extensor muscle is weak, the surface EMG signal of the extensor carpi ulnaris muscle is strong, and the surface EMG signal of the flexor carpi ulnaris muscle is weak, the recognition result is wrist extension.
若指伸肌表面肌电信号弱、尺侧腕伸肌表面肌电信号弱、尺侧腕屈肌表面肌电信号强,识别结果为屈腕动作。If the surface EMG signal of the finger extensor muscle is weak, the surface EMG signal of the extensor carpi ulnaris muscle is weak, and the surface EMG signal of the flexor carpi ulnaris muscle is strong, the recognition result is wrist flexion.
若指伸肌表面肌电信号强、尺侧腕伸肌表面肌电信号强、尺侧腕屈肌表面肌电信号弱,识别结果为展拳动作。If the surface EMG signal of the finger extensor muscle is strong, the surface EMG signal of the extensor carpi ulnaris muscle is strong, and the surface EMG signal of the flexor carpi ulnaris muscle is weak, the recognition result is a fist movement.
若指伸肌表面肌电信号强、尺侧腕伸肌表面肌电信号强、尺侧腕屈肌表面肌电信号强,识别结果为握拳动作。If the surface EMG signal of the finger extensor muscle is strong, the surface EMG signal of the extensor carpi ulnaris muscle is strong, and the surface EMG signal of the flexor carpi ulnaris muscle is strong, the recognition result is a fist movement.
若指伸肌表面肌电信号弱、尺侧腕伸肌表面肌电信号弱、尺侧腕屈肌表面肌电信号弱,识别结果为不动作。If the surface EMG signal of the finger extensor muscle is weak, the surface EMG signal of the extensor carpi ulnaris muscle is weak, and the surface EMG signal of the flexor carpi ulnaris muscle is weak, the recognition result is no action.
用表格表示上述组合关系,如表1所示。The above-mentioned combination relationship is expressed in a table, as shown in Table 1.
表1 三路肌电信号强弱与操作者手部动作的对应关系Table 1 Correspondence between the strength of the three EMG signals and the operator's hand movements

表1的逻辑关系编成流程图,类似一个树形结构,如图2所示。The logical relationship in Table 1 is compiled into a flowchart, which is similar to a tree structure, as shown in Figure 2.
步骤三,把步骤二的识别结果转化为机器人控制指令,控制机器人手操作相应的动作。Step 3: convert the recognition result of step 2 into robot control instructions, and control the corresponding actions of the robot hand.
本发明实施采用史陶比尔公司的TX90L型工业机器人,如图3所示,但本发明的保护范围不限于该机器人。本发明将人手姿势描述对应于TX90L型机器人手的姿势如表2所示。The implementation of the present invention adopts the TX90L type industrial robot of Stäubli Company, as shown in Figure 3, but the protection scope of the present invention is not limited to this robot. The present invention describes the posture of the human hand corresponding to the posture of the TX90L robot hand as shown in Table 2.
表2 人手与机器人手姿势对应关系Table 2 Correspondence relationship between human hand and robot hand posture
步骤四,机器人手合拢的作业过程中,通过安装于机器人手的触觉传感器,将现场触觉信息反馈给操控者,实现触觉临场感。触觉临场感系统如图4所示。Step 4: During the operation process of closing the robot hand, the on-site tactile information is fed back to the operator through the tactile sensor installed on the robot hand to realize the sense of tactile presence. The tactile presence system is shown in Figure 4.
触觉传感器是一款压阻式触觉传感器(见发明专利200510060617.3),安装于机器人手,实物如图3所示。The tactile sensor is a piezoresistive tactile sensor (see invention patent 200510060617.3), installed on the robot hand, as shown in Figure 3.
所述的触觉临场感,具体是:当触觉传感器触碰被抓工件时,由触觉处理电路完成触觉信号处理,并通过刺激电路发送到刺激电极,刺激电极作用于指端的神经和肌体组织,在刺激电流的作用下,指端电触点下肌体及神经末梢等兴奋组织的细胞出现特征性生物电信号,这些生物电信号上传至中枢神经系统后,再经神经系统感知,就可使操作者产生相应电触点处的触觉意识,从而实现触觉临场感。The tactile presence is specifically: when the tactile sensor touches the grasped workpiece, the tactile signal processing is completed by the tactile processing circuit, and is sent to the stimulating electrode through the stimulating circuit, and the stimulating electrode acts on the nerves and body tissues at the fingertips. Under the action of stimulating current, the cells of the excitatory tissue such as the human body and nerve endings under the electric contact of the fingertips appear characteristic bioelectrical signals. After these bioelectrical signals are uploaded to the central nervous system, and then sensed by the nervous system, the operator can Haptic presence is achieved by generating tactile awareness at the corresponding electrical contacts.
步骤五,操控者可根据触觉临场感来掌握自己的手部动作,并根据操作者的肌电信号重复步骤一至步骤五控制机器人手。In step five, the operator can control his hand movements according to the sense of tactile presence, and repeat steps one to five to control the robot hand according to the operator's myoelectric signal.
Claims (1)








Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2012102318823ACN102729254A (en) | 2012-07-04 | 2012-07-04 | Myoelectricity control method for remote-control robot based on touch presence feeling |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2012102318823ACN102729254A (en) | 2012-07-04 | 2012-07-04 | Myoelectricity control method for remote-control robot based on touch presence feeling |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN102729254Atrue CN102729254A (en) | 2012-10-17 |
Family
ID=46985904
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2012102318823APendingCN102729254A (en) | 2012-07-04 | 2012-07-04 | Myoelectricity control method for remote-control robot based on touch presence feeling |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN102729254A (en) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103861290A (en)* | 2014-02-27 | 2014-06-18 | 常州大学 | Myoelectricity remote control toy aircraft and control method thereof |
| CN103941859A (en)* | 2014-03-21 | 2014-07-23 | 上海威璞电子科技有限公司 | Algorithm for differentiating different gestures through signal power |
| CN104586390A (en)* | 2014-12-18 | 2015-05-06 | 中国科学院深圳先进技术研究院 | Information processing method and related equipment |
| CN105014676A (en)* | 2015-07-03 | 2015-11-04 | 浙江大学 | Robot motion control method |
| CN106055107A (en)* | 2016-06-07 | 2016-10-26 | 中国人民解放军国防科学技术大学 | Space remote operation technology ground verification system based on man-in-loop |
| CN107921621A (en)* | 2015-08-25 | 2018-04-17 | 川崎重工业株式会社 | Robot system |
| CN114227645A (en)* | 2021-12-28 | 2022-03-25 | 湖南省农业装备研究所 | A manipulator for multi-finger space coordinated control in a high-risk pollution environment |
| WO2023273191A1 (en)* | 2021-06-28 | 2023-01-05 | 深圳先进技术研究院 | Gesture control-oriented human-machine interaction system and method |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5413611A (en)* | 1992-07-21 | 1995-05-09 | Mcp Services, Inc. | Computerized electronic prosthesis apparatus and method |
| CN1108520A (en)* | 1994-12-16 | 1995-09-20 | 清华大学 | Adaptive control device for prosthetic hand grip |
| CN1582866A (en)* | 2004-06-02 | 2005-02-23 | 杭州电子科技大学 | Myoelectric bionic artificial hand with thigmesthesia and its control |
| CN101036601A (en)* | 2007-04-24 | 2007-09-19 | 杭州电子科技大学 | Real time control device and control method by two-degrees-of freedom myoelectricity artificial hand |
| CN101332136A (en)* | 2008-08-01 | 2008-12-31 | 杭州电子科技大学 | Electric prosthetic hand controlled by brain-electricity-myoelectricity and control method |
- 2012
- 2012-07-04CNCN2012102318823Apatent/CN102729254A/enactivePending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5413611A (en)* | 1992-07-21 | 1995-05-09 | Mcp Services, Inc. | Computerized electronic prosthesis apparatus and method |
| CN1108520A (en)* | 1994-12-16 | 1995-09-20 | 清华大学 | Adaptive control device for prosthetic hand grip |
| CN1582866A (en)* | 2004-06-02 | 2005-02-23 | 杭州电子科技大学 | Myoelectric bionic artificial hand with thigmesthesia and its control |
| CN101036601A (en)* | 2007-04-24 | 2007-09-19 | 杭州电子科技大学 | Real time control device and control method by two-degrees-of freedom myoelectricity artificial hand |
| CN101332136A (en)* | 2008-08-01 | 2008-12-31 | 杭州电子科技大学 | Electric prosthetic hand controlled by brain-electricity-myoelectricity and control method |
Non-Patent Citations (2)
| Title |
|---|
| 唐建友,罗志增: ""三自由度比例控制肌电假手的设计"", 《机电工程》, vol. 26, no. 12, 31 December 2009 (2009-12-31), pages 85 - 89* |
| 席旭刚等: ""具有触觉临场感和肌电仿生控制功能的遥控机械手研究"", 《机器人》, vol. 31, no. 03, 31 May 2009 (2009-05-31), pages 271 - 275* |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103861290A (en)* | 2014-02-27 | 2014-06-18 | 常州大学 | Myoelectricity remote control toy aircraft and control method thereof |
| CN103941859A (en)* | 2014-03-21 | 2014-07-23 | 上海威璞电子科技有限公司 | Algorithm for differentiating different gestures through signal power |
| CN104586390A (en)* | 2014-12-18 | 2015-05-06 | 中国科学院深圳先进技术研究院 | Information processing method and related equipment |
| CN105014676A (en)* | 2015-07-03 | 2015-11-04 | 浙江大学 | Robot motion control method |
| CN107921621A (en)* | 2015-08-25 | 2018-04-17 | 川崎重工业株式会社 | Robot system |
| CN106055107A (en)* | 2016-06-07 | 2016-10-26 | 中国人民解放军国防科学技术大学 | Space remote operation technology ground verification system based on man-in-loop |
| CN106055107B (en)* | 2016-06-07 | 2019-04-05 | 中国人民解放军国防科学技术大学 | Space teleoperation technology ground validation system based on people in circuit |
| WO2023273191A1 (en)* | 2021-06-28 | 2023-01-05 | 深圳先进技术研究院 | Gesture control-oriented human-machine interaction system and method |
| CN114227645A (en)* | 2021-12-28 | 2022-03-25 | 湖南省农业装备研究所 | A manipulator for multi-finger space coordinated control in a high-risk pollution environment |
| CN114227645B (en)* | 2021-12-28 | 2024-12-06 | 湖南省农业装备研究所 | A multi-finger spatial collaborative control manipulator in a high-risk pollution environment |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102729254A (en) | Myoelectricity control method for remote-control robot based on touch presence feeling | |
| Yang et al. | An anthropomorphic robot hand developed based on underactuated mechanism and controlled by EMG signals | |
| Antuvan et al. | Embedded human control of robots using myoelectric interfaces | |
| Jiang et al. | A method of recognizing finger motion using wavelet transform of surface EMG signal | |
| Jang et al. | Robotic index finger prosthesis using stackable double 4-BAR mechanisms | |
| Li et al. | Design of a myoelectric prosthetic hand implementing postural synergy mechanically | |
| CN109521880B (en) | A teleoperated robot system and method driven by hybrid bioelectrical signals | |
| Naidu et al. | Control strategies for smart prosthetic hand technology: An overview | |
| Meattini et al. | Experimental evaluation of a sEMG-based human-robot interface for human-like grasping tasks | |
| Zhang et al. | Biomechatronic design and control of an anthropomorphic artificial hand for prosthetic applications | |
| CN117084835B (en) | Intelligent artificial limb system and control method | |
| Sattar et al. | Real-time EMG signal processing with implementation of PID control for upper-limb prosthesis | |
| Ngeo et al. | Estimation of continuous multi-DOF finger joint kinematics from surface EMG using a multi-output Gaussian process | |
| Kwon et al. | Electromyography-based decoding of dexterous, in-hand manipulation of objects: Comparing task execution in real world and virtual reality | |
| Meeker et al. | EMG-controlled non-anthropomorphic hand teleoperation using a continuous teleoperation subspace | |
| Chen et al. | Towards robot-assisted post-stroke hand rehabilitation: Fugl-Meyer gesture recognition using sEMG | |
| Zhao et al. | A five-fingered underactuated prosthetic hand control scheme | |
| Dwivedi et al. | High-density electromyography based control of robotic devices: On the execution of dexterous manipulation tasks | |
| Chen et al. | Robot arm control method using forearm EMG signals | |
| Taşar et al. | EMG-Controlled Prosthetic Hand with Fuzzy Logic Classification Algorithm | |
| Ye | Optimization and Application of Gesture Classification Algorithm Based on EMG | |
| Kim et al. | Developments in brain–machine interfaces from the perspective of robotics | |
| Harada et al. | Robot finger design for myoelectric prosthetic hand and recognition of finger motions via surface EMG | |
| CN111897415B (en) | A compliant and intuitive control method for a virtual prosthetic hand based on electromyographic signals and variable stiffness control | |
| Zhang et al. | The application of emg and machine learning in human machine interface |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication | Application publication date:20121017 |