CN102499859B - Lower limb exoskeleton walking rehabilitation robot - Google Patents
Lower limb exoskeleton walking rehabilitation robotDownload PDFInfo
- Publication number
- CN102499859B CN102499859BCN201110350834.1ACN201110350834ACN102499859BCN 102499859 BCN102499859 BCN 102499859BCN 201110350834 ACN201110350834 ACN 201110350834ACN 102499859 BCN102499859 BCN 102499859B
- Authority
- CN
- China
- Prior art keywords
- plate
- module
- joint
- fixing plate
- spring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Rehabilitation Tools (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及一种医疗器械,尤其涉及一种下肢外骨骼行走康复机器人。The invention relates to a medical device, in particular to a lower limb exoskeleton walking rehabilitation robot.
背景技术Background technique
脊髓是感觉、运动、植物神经系统的传导通路,因此脊髓损伤的主要症状是因传导通路的中断而引起的麻痹。脊髓损伤是指由于各种外力作用于脊柱所造成的脊髓压迫或断裂,严重的脊髓损伤将导致下肢截瘫,因此,寻求有效的康复手段,使患者能够在一定程度上恢复失去的功能,不仅有利于提高患者本身的生活质量,也可以减轻家庭和社会的总体负担。下肢外骨骼行走康复机器人是一种可穿戴的、具有人工智能的机器人系统外骨骼,结合了人的智能和机械装置的机械能量,患者借助此系统可以摆脱轮椅,实现站立并行走,建立起对生活的信心。The spinal cord is the conduction pathway of the sensory, motor, and autonomic nervous systems, so the main symptom of spinal cord injury is paralysis caused by interruption of the conduction pathway. Spinal cord injury refers to the compression or rupture of the spinal cord caused by various external forces acting on the spine. Severe spinal cord injury will lead to lower limb paraplegia. It is conducive to improving the quality of life of patients themselves, and can also reduce the overall burden on families and society. The lower extremity exoskeleton walking rehabilitation robot is a wearable robot system exoskeleton with artificial intelligence, which combines human intelligence and mechanical energy of mechanical devices. With the help of this system, patients can get rid of wheelchairs, stand and walk, and establish a sense of live with confidence.
经过对现有技术的检索发现,申请号为200910088396.9的中国发明专利,名称:穿戴式下肢外骨骼装置,该技术包括:腰部支撑架和载物架,可调整髋部机构,连杆可调膝关节机构,连杆可调踝关节机构,压力检测鞋,腿部连杆,约束部件及各连接件,该外骨骼装置单下肢有六个自由度,分别是髋关节两个,膝关节一个和踝关节三个自由度,该装置可用于增强穿戴者步行负重和长时间行走的能力,但该装置并未涉及驱动,故此发明所提供的功能有限,不能用于康复,不能用于帮助患者行走。申请号为200410053695.6的中国发明专利,名称:可穿戴式的下肢步行外骨骼,该技术包括:腰部支撑、髋部四杆机构、膝盖四杆机构、脚踝四杆机构和足底支撑,该外骨骼单下肢有四个自由度,使用四杆机构可以很好的完成较大的负载,但该外骨骼机器人只用于辅助或增强穿戴着的步行运动能力,不能用于帮助患者实现行走,且结构中没有机械限位。申请号为201010158178.0的中国发明专利申请公开的下肢康复训练机器人是帮助脑卒中患者训练的设备,不能用于帮助患者行走。申请号为201110029533.9的中国发明专利申请公开的外骨骼康复机器人用于康复训练,且没有吊装机构,很难实现帮助脑卒中和截瘫患者训练。After searching the existing technology, it is found that the application number is 200910088396.9 Chinese invention patent, name: wearable lower extremity exoskeleton device, this technology includes: waist support frame and load frame, adjustable hip mechanism, connecting rod adjustable knee Joint mechanism, connecting rod adjustable ankle joint mechanism, pressure detection shoes, leg connecting rod, restraint parts and various connecting parts, the exoskeleton device has six degrees of freedom for a single lower limb, two hip joints, one knee joint and The three degrees of freedom of the ankle joint, the device can be used to enhance the wearer's ability to walk with weight and walk for a long time, but the device does not involve driving, so the function provided by the invention is limited, it cannot be used for rehabilitation, and it cannot be used to help patients walk . Chinese invention patent application number 200410053695.6, name: wearable lower limb walking exoskeleton, the technology includes: waist support, hip four-bar mechanism, knee four-bar mechanism, ankle four-bar mechanism and foot support, the exoskeleton A single lower limb has four degrees of freedom, and a four-bar mechanism can be used to complete a large load, but the exoskeleton robot is only used to assist or enhance the walking ability of the wearer, and cannot be used to help patients walk, and the structure There are no mechanical stops. The lower limb rehabilitation training robot disclosed in the Chinese invention patent application with application number 201010158178.0 is a device for helping stroke patients to train, and cannot be used to help patients walk. Application No. 201110029533.9 Chinese Invention Patent Application discloses an exoskeleton rehabilitation robot for rehabilitation training, and without a lifting mechanism, it is difficult to help stroke and paraplegia patients train.
发明内容Contents of the invention
本发明针对现有技术存在的上述不足,提供一种下肢外骨骼行走康复机器人,辅助患者摆脱轮椅站立起来并行走,此发明装置单下肢包括三个自由度,髋关节的屈伸运动,膝关节的屈伸运动以及踝关节的跖屈背屈运动,其中前两个自由度有驱动。The present invention aims at the above-mentioned deficiencies existing in the prior art, and provides a lower limb exoskeleton walking rehabilitation robot, which assists the patient to get out of the wheelchair and stand up and walk. Flexion and extension, as well as plantarflexion and dorsiflexion of the ankle, where the first two degrees of freedom are driven.
本发明是通过以下技术方案实现的,本发明包括:外骨骼本体和拐杖模块;其中,所述外骨骼本体包括踝关节运动模块、膝关节运动模块、弹性驱动器模块、髋关节运动模块、腰部及支撑架模块,其中:膝关节运动模块两端分别与踝关节运动模块、髋关节运动模块相连,髋关节运动模块与腰部及支撑架相连接,拐杖模块结构上独立于外骨骼本体并与外骨骼本体电气连接,电气连接方式为:通过拐杖模块的按钮式电源开关和常闭开关的闭合来控制弹性驱动器模块的运动,继而控制外骨骼本体的运动。The present invention is achieved through the following technical solutions. The present invention includes: an exoskeleton body and a crutch module; wherein, the exoskeleton body includes an ankle joint movement module, a knee joint movement module, an elastic driver module, a hip joint movement module, a waist and The support frame module, in which: the two ends of the knee joint movement module are respectively connected with the ankle joint movement module and the hip joint movement module, the hip joint movement module is connected with the waist and the support frame, and the crutch module is structurally independent of the exoskeleton body and connected with the exoskeleton The main body is electrically connected, and the electrical connection method is: the movement of the elastic driver module is controlled by closing the push-button power switch and the normally closed switch of the crutch module, and then the movement of the exoskeleton body is controlled.
所述的踝关节运动模块包括:脚部、弹簧板、踝关节支座、踝关节固定板、拉簧,其中:踝关节支座固定于脚部,踝关节固定板通过螺丝固定在踝关节支座上,踝关节固定板通过轴承与小腿部分相连,拉簧连接在弹簧板之间。The ankle joint movement module includes: feet, spring boards, ankle joint supports, ankle joint fixing plates, and extension springs, wherein: the ankle joint supports are fixed on the feet, and the ankle joint fixing plates are fixed on the ankle joint supports by screws. On the seat, the ankle joint fixing plate is connected with the calf part through bearings, and the extension spring is connected between the spring plates.
所述的膝关节运动模块包括:小腿、小腿长度调节板、定位螺栓、小腿绑带板、膝关节固定板,其中:小腿长度调节板插于小腿的槽内,可沿槽滑动并用螺栓锁紧,以调节小腿对应部分的长度,膝关节固定板通过定位螺栓与小腿长度调节板相连,另一端通过轴承与与大腿部分相连,小腿绑带板固定在小腿上,小腿的一端通过轴承连接与脚部相连。The knee joint movement module includes: calf, calf length adjustment plate, positioning bolts, calf strap plate, knee joint fixing plate, wherein: the calf length adjustment plate is inserted into the groove of the calf, can slide along the groove and be locked with bolts , to adjust the length of the corresponding part of the calf, the knee joint fixing plate is connected with the calf length adjustment plate through a positioning bolt, the other end is connected with the thigh part through a bearing, the calf strap plate is fixed on the calf, and one end of the calf is connected with the foot through a bearing department connected.
所述的髋关节运动模块包括:膝关节限位块、大腿、定位螺栓、驱动器支座、大腿长度调节板、髋关节固定板、销钉、髋关节限位块、髋关节,其中:大腿长度调节板插于大腿的槽内,可沿槽滑动并用定位螺栓锁紧,以调节大腿对应部分的长度,驱动器支座固定在大腿上,并通过轴承与弹性驱动器相连,髋关节固定板一端通过螺丝与大腿长度调节板相连,另一端通过深沟球轴承与髋关节相连,销钉用来定位膝关节限位块和髋关节限位块位置,从而到达不同的限位行程。The hip joint movement module includes: knee joint limit block, thigh, positioning bolt, driver support, thigh length adjustment plate, hip joint fixation plate, pin, hip joint limit block, hip joint, wherein: thigh length adjustment The plate is inserted into the groove of the thigh, can slide along the groove and locked with positioning bolts to adjust the length of the corresponding part of the thigh. The driver support is fixed on the thigh and connected with the elastic driver through the bearing. One end of the hip joint fixing plate is connected to the The thigh length adjustment plate is connected, and the other end is connected with the hip joint through a deep groove ball bearing. The pins are used to locate the position of the knee joint limit block and the hip joint limit block, so as to reach different limit strokes.
所述的腰部及支撑架模块包括:腰部支撑、支架支撑板、支架立板、支架底板和定位螺栓,其中:腰部支撑插于髋关节的方形槽内,可沿槽滑动并用紧钉螺栓锁紧,以调节腰部的横向长度尺寸,支架立板上开有方孔,腰部支撑可以左右移动调整到适合患者的髋部尺寸后用定位螺栓锁死,支架底板通过螺钉与支架立板连接,支架支撑板固定在支架底板和支架立板上以加强支撑架的刚度和强度。The waist and support frame module includes: waist support, bracket support plate, bracket vertical plate, bracket bottom plate and positioning bolts, wherein: the waist support is inserted into the square groove of the hip joint, can slide along the groove and be locked with a tightening bolt , to adjust the horizontal length of the waist. There is a square hole on the vertical plate of the bracket. The lumbar support can be moved left and right to adjust to the size of the patient’s hip and locked with positioning bolts. The bottom plate of the bracket is connected with the vertical plate of the bracket through screws. The board is fixed on the bottom plate of the support and the vertical plate of the support to strengthen the rigidity and strength of the support frame.
所述的弹性驱动器模块包括:直流电机、电机固定板、联轴器、丝杠、导向杆、后弹簧挡板、丝杠螺母、前弹簧挡板、弹簧长度调节板、弹簧、丝杠固定板、推杆、推杆固定板、关节轴承,其中:电机固定在电机固定板上,联轴器连接电机和丝杠;导向杆一端固定在电机固定板上,另一端固定在丝杠固定板上,导向杆穿过后弹簧板、丝杠螺母和前弹簧板上的孔,并与这些孔之间隙配合;推杆一端固定在后弹簧板上,另一端固定在推杆固定板上,推杆穿过丝杠螺母、前弹簧挡板和丝杠固定板上的孔,并与这些孔间隙配合;四根弹簧分别放置在后弹簧挡板和丝杠螺母之间,以及丝杠螺母和前弹簧挡板之间,且四根弹簧穿过两根推杆,确定好弹簧的预压缩量之后,用螺钉将弹簧长度调节板固定在后弹簧挡板和前弹簧挡板上;关节轴承固定在推杆固定板上。The elastic driver module includes: a DC motor, a motor fixing plate, a shaft coupling, a lead screw, a guide rod, a rear spring baffle, a screw nut, a front spring baffle, a spring length adjustment plate, a spring, and a lead screw fixing plate , push rod, push rod fixing plate, joint bearing, wherein: the motor is fixed on the motor fixing plate, and the coupling connects the motor and the screw; one end of the guide rod is fixed on the motor fixing plate, and the other end is fixed on the screw fixing plate , the guide rod passes through the holes on the rear spring plate, the screw nut and the front spring plate, and fits with the clearance between these holes; one end of the push rod is fixed on the rear spring plate, and the other end is fixed on the push rod fixing plate, and the push rod passes through Through the holes on the screw nut, the front spring baffle and the screw fixing plate, and cooperate with these holes; the four springs are respectively placed between the rear spring baffle and the screw nut, and the screw nut and the front spring stop Between the plates, and the four springs pass through the two push rods. After the pre-compression of the springs is determined, the spring length adjustment plate is fixed on the rear spring baffle and the front spring baffle with screws; the joint bearing is fixed on the push rod fixed on the board.
所述的拐杖模块包括:按钮式电源开关、拐杖本体、连接套、常开开关、导向套、开关顶板、压簧、拐杖头,其中:电源开关通过螺纹孔与拐杖本体连接,连接套连接拐杖本体和常开开关,导向套通过螺纹与连接套的一段相连接,开关顶板与穿过导向套内孔的拐杖头相连,压簧放置在连接套和拐杖头之间。The crutch module includes: a push-button power switch, a crutch body, a connecting sleeve, a normally open switch, a guide sleeve, a switch top plate, a pressure spring, and a crutch head, wherein: the power switch is connected to the crutch body through a threaded hole, and the connecting sleeve is connected to the crutch The main body and the normally open switch, the guide sleeve are connected with a section of the connecting sleeve through threads, the switch top plate is connected with the crutch head passing through the inner hole of the guide sleeve, and the pressure spring is placed between the connecting sleeve and the crutch head.
本发明工作时:首先测量患者小腿、大腿和髋部的尺寸,然后调节外骨骼小腿、大腿和髋部到合适的尺寸。穿戴外骨骼机器人,通过绑带将患者的大小腿与外骨骼的大小腿相连,借助腰带将患者和髋部连接在一起,患者双手握住拐杖来平衡身体并通过拐杖控制外骨骼的运动。When the present invention works: first measure the size of the patient's calf, thigh and hip, and then adjust the exoskeleton calf, thigh and hip to a suitable size. Wearing the exoskeleton robot, the patient's thighs are connected to the thighs of the exoskeleton by straps, and the patient and hip are connected by the belt. The patient holds the crutches with both hands to balance the body and controls the movement of the exoskeleton through the crutches.
本发明相比现有技术具有以下优点:本发明中外骨骼机器人的机械装置单下肢具有三个自由度,利用较少却必须的自由度来实现行走,降低了机构的复杂程度,提高了装置的效率,通过膝关节和髋关节的屈伸运动实现跨步,踝关节的跖屈背屈运动可以帮助患者在迈步的过程中减少来自地面的冲击;膝关节和髋关节的运动范围在95°,即患者可以借助此外骨骼实现行走和坐下。且每个机器人关节运动自由度与人体关节运动自由度基本保持了同轴,这一仿生设计增强了机器的舒适性和可靠性,更有益于机器人辅助患者行走。Compared with the prior art, the present invention has the following advantages: the single lower limb of the mechanical device of the exoskeleton robot in the present invention has three degrees of freedom, and uses less but necessary degrees of freedom to realize walking, which reduces the complexity of the mechanism and improves the safety of the device. Efficiency, striding can be achieved through the flexion and extension of the knee joint and hip joint, and the plantar flexion and dorsiflexion of the ankle joint can help patients reduce the impact from the ground during the stepping process; the range of motion of the knee joint and hip joint is 95°, that is, Patients can walk and sit with the help of exoskeleton. Moreover, the degree of freedom of each robot joint movement is basically coaxial with the degree of freedom of human joint movement. This bionic design enhances the comfort and reliability of the machine, and is more beneficial for the robot to assist patients in walking.
以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。The idea, specific structure and technical effects of the present invention will be further described below in conjunction with the accompanying drawings, so as to fully understand the purpose, features and effects of the present invention.
附图说明Description of drawings
图1是本发明的一个较佳实施例的下肢外骨骼装置的整体结构示意图。Fig. 1 is a schematic diagram of the overall structure of a lower limb exoskeleton device according to a preferred embodiment of the present invention.
图2是图1所示实施例中踝关节运动模块的局部示意图。Fig. 2 is a partial schematic diagram of the ankle joint movement module in the embodiment shown in Fig. 1 .
图3是图1所示实施例中膝关节运动结模块的局部示意图。Fig. 3 is a partial schematic diagram of the knee joint kinematic module in the embodiment shown in Fig. 1 .
图4是图1所示实施例中弹性驱动器模块的局部示意图。Fig. 4 is a partial schematic diagram of the elastic driver module in the embodiment shown in Fig. 1 .
图5是图1所示实施例中髋关节运动模块的局部示意图。Fig. 5 is a partial schematic diagram of the hip joint motion module in the embodiment shown in Fig. 1 .
图6是图1所示实施例中髋部和支架模块的局部示意图。Fig. 6 is a partial schematic view of the hip and frame module in the embodiment shown in Fig. 1 .
图7是图1所示实施例中拐杖模块的局部示意图。Fig. 7 is a partial schematic diagram of the crutch module in the embodiment shown in Fig. 1 .
图8是图7的拐杖模块中端部的局部示意图。FIG. 8 is a partial schematic view of the middle end of the crutch module of FIG. 7 .
图9是图1所示实施例的控制电路框图。Fig. 9 is a block diagram of the control circuit of the embodiment shown in Fig. 1 .
具体实施方式Detailed ways
如图1所示,本实施例包括:踝关节运动模块1、膝关节运动模块2、弹性驱动器模块3、髋关节运动模块4、腰部及支撑架模块5、拐杖模块6,其中:膝关节运动模块2两端分别与踝关节运动模块1和髋关节运动模块相连4,弹性驱动器3与髋关节运动模块5相连,髋关节运动模块5与腰部及支撑架5相连接,拐杖模块6独立于外骨骼本体。As shown in Figure 1, the present embodiment includes: ankle
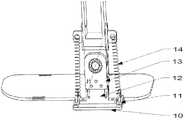
如图2所示,所述的踝关节运动模块1包括:脚部10、弹簧板11、踝关节支座12、踝关节固定板13、拉簧14,其中:踝关节支座12固定于脚部10,踝关节固定板13通过螺丝固定在踝关节支座12上,踝关节固定板13通过轴承与小腿部分相连,拉簧14连接在弹簧板11之间。As shown in Figure 2, described ankle
所述的踝关节运动模块1实现踝关节的跖屈背屈运动:即脚部绕J1轴旋转。The ankle
如图3所示,所述的膝关节运动模块2包括:小腿20、小腿长度调节板21、定位螺栓22、小腿绑带板23、膝关节固定板24,其中:小腿长度调节板21插于小腿20的槽内,可沿槽滑动并用螺栓锁紧,以调节小腿对应部分的长度,膝关节固定板24通过螺钉与小腿长度调节板21相连,另一端通过轴承与大腿部分相连,小腿绑带板23固定在小腿20上,小腿20的一端通过轴承连接与脚部相连。As shown in Fig. 3, described knee
所述的膝关节运动模块2实现踝关节的屈伸运动:即小腿部分绕J2轴旋转。The knee
如图4所示,所述的弹性驱动器模块3包括:直流电机30、电机固定板31、联轴器32、丝杠33、导向杆34、后弹簧挡板35、丝杠螺母36、前弹簧挡板37、弹簧长度调节板38、弹簧39、丝杠固定板310、推杆311、推杆固定板312、关节轴承313,其中:电机30固定在电机固定板31上,联轴器32连接电机30和丝杠33;导向杆34一端固定在电机固定板31上,另一端固定在丝杠固定板310上,导向杆34穿过后弹簧板35、丝杠螺母36和前弹簧板37上的孔,并与这些孔之间隙配合;推杆311一端固定在后弹簧板35上,另一端固定在推杆固定板312上,推杆311穿过丝杠螺母36、前弹簧挡板37和丝杠固定板310上的孔,并与这些孔间隙配合;四根弹簧39分别放置在后弹簧挡板35和丝杠螺母36之间,以及丝杠螺母36和前弹簧挡板之间,且四根弹簧穿过两根推杆311,确定好弹簧39的预压缩量之后,用螺钉将弹簧长度调节板38固定在后弹簧挡板35和前弹簧挡板37上;关节轴承313固定在推杆固定板312上。As shown in Figure 4, described elastic driver module 3 comprises:
弹性驱动器模块3的工作方式:电机30旋转带动丝杠33一起旋转,丝杠33的旋转运动转化成丝杠螺母36的直线运动,丝杠螺母36的直线运动将压缩丝杠螺母和弹簧挡板间的弹簧39,弹簧的推力推动弹簧挡板35、37做直线运动,从而带动推杆311和关节轴承313做直线运动,即实现了将电机30的旋转运动转化成驱动器直线运动。The working mode of the elastic driver module 3: the rotation of the
如图5所示,所述的髋关节运动模块4包括:膝关节限位块40、大腿41、定位螺栓42、驱动器支座43、大腿长度调节板44、髋关节固定板45、销钉46、髋关节限位块47、髋关节48,其中:大腿长度调节板44插于大腿41的槽内,可沿槽滑动并用定位螺栓42锁紧,以调节大腿对应部分的长度,驱动器支座43固定在大腿41上,并通过轴承与弹性驱动器3相连,髋关节固定板45一端通过螺丝与大腿长度调节板44相连,另一端通过深沟球轴承与髋关节48相连,限位块47通过连接于髋关节48上,通过限位块47上的圆弧面和斜面限制髋关节固定板45绕J3的旋转角度,销钉46用来定位膝关节限位块40和髋关节限位块47的位置,从而实现不同的限位行程。As shown in Fig. 5, described hip
所述的髋关节运动模块4实现髋关节的屈伸运动:即大腿部分绕J3轴旋转。The hip
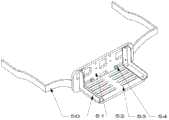
如图6所示,所述的髋部及支撑架模块5包括:腰部支撑50、支架支撑板51、支架立板52、支架底板53和定位螺栓54,其中:腰部支撑50插于髋关节48的方形槽内,可沿槽滑动并用紧钉螺栓锁紧,以调节腰部的横向长度尺寸,支架立板52上开有方孔,腰部支撑50可以左右移动调整到适合患者的髋部尺寸后用定位螺栓54锁死,支架底板53通过螺钉与支架立板52连接,支架支撑板52固定在支架底板53和支架立板52上以加强支撑架的刚度和强度。As shown in Figure 6, the hip and support frame module 5 includes: a
如图7、图8所示,所述的拐杖模块6包括:按钮式电源开关60、拐杖本体61、连接套62、常开开关63、导向套64、开关顶板65、压簧66、拐杖头67,其中:电源开关60通过螺纹孔与拐杖本体61连接,连接套62连接拐杖本体61和常开开关63,导向套64通过螺纹与连接套62的一段相连接,开关顶板65与穿过导向套64内孔的拐杖头67相连,压簧66放置在连接套62和拐杖头67之间。As shown in Figures 7 and 8, the crutch module 6 includes: a push-
本实施例工作时:患者坐于座椅的合适位置上穿戴外骨骼本体,调整外骨骼本体的各个部分的尺寸,使人体的踝关节、膝关节和髋关节对位于机器人相应的旋转轴,以适应患者身体穿戴。穿戴好外骨骼本体后患者借助拐杖模块6站立起来。控制原理如图9所示,患者按下按钮式电源开关60后,如果右边的拐杖着地,触发拐杖头上的常开开关63闭合,外骨骼的控制系统将驱动左腿的弹性驱动器模块3工作,从而实现左腿迈步,同理,左边的拐杖着地带动右腿迈步,如此不断往复,患者得以借助外骨骼机器人行走。When this embodiment is working: the patient sits on the appropriate position of the seat and wears the exoskeleton body, adjusts the size of each part of the exoskeleton body so that the ankle joints, knee joints and hip joints of the human body are aligned with the corresponding rotation axes of the robot, so that Adapt to the patient's body wear. After wearing the exoskeleton body, the patient stands up by means of the crutch module 6 . The control principle is shown in Figure 9. After the patient presses the push-
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。The preferred specific embodiments of the present invention have been described in detail above. It should be understood that those skilled in the art can make many modifications and changes according to the concept of the present invention without creative efforts. Therefore, all technical solutions that can be obtained by those skilled in the art based on the concept of the present invention through logical analysis, reasoning or limited experiments on the basis of the prior art shall be within the scope of protection defined by the claims.
Claims (6)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201110350834.1ACN102499859B (en) | 2011-11-08 | 2011-11-08 | Lower limb exoskeleton walking rehabilitation robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201110350834.1ACN102499859B (en) | 2011-11-08 | 2011-11-08 | Lower limb exoskeleton walking rehabilitation robot |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102499859A CN102499859A (en) | 2012-06-20 |
| CN102499859Btrue CN102499859B (en) | 2014-04-16 |
Family
ID=46212037
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201110350834.1AExpired - Fee RelatedCN102499859B (en) | 2011-11-08 | 2011-11-08 | Lower limb exoskeleton walking rehabilitation robot |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN102499859B (en) |
Families Citing this family (63)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2506932C1 (en)* | 2012-07-04 | 2014-02-20 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Московский государственный университет имени М.В. Ломоносова" (МГУ) | Knee joint of exoskeleton |
| CN103622797B (en)* | 2012-08-23 | 2016-03-16 | 潘国陶 | A kind of portable walking-replacing tool |
| CN102871822B (en)* | 2012-09-28 | 2014-12-10 | 中国科学院深圳先进技术研究院 | Portable and wearable exoskeleton robot for lower limb recovery and walking aid |
| CN102846449B (en)* | 2012-09-28 | 2014-10-08 | 中国科学院深圳先进技术研究院 | Portable and wearable exoskeleton robot for lower limb rehabilitation and walk aid |
| CN102846448B (en)* | 2012-09-28 | 2014-10-29 | 中国科学院深圳先进技术研究院 | Portable and wearable exoskeleton robot for lower limb rehabilitation and walk aid |
| CN103120586A (en)* | 2012-10-22 | 2013-05-29 | 上海大学 | Auxiliary device and method used for collecting human body gait kinematical parameters |
| CA2890148A1 (en)* | 2012-11-01 | 2014-05-08 | British Columbia Institute Of Technology | Mobility system including an exoskeleton assembly releasably supported on a wheeled base |
| CN102885682B (en)* | 2012-11-06 | 2014-05-28 | 中国科学院自动化研究所 | Thigh length adjusting device for rehabilitation robot |
| KR101371756B1 (en)* | 2012-12-17 | 2014-03-12 | 현대자동차(주) | Method for controlling walking of robot |
| CN102989124B (en)* | 2012-12-19 | 2015-06-17 | 上海交通大学 | Portable body movement rehabilitation training device and using method thereof |
| CN103099691B (en)* | 2012-12-24 | 2014-12-17 | 东南大学 | Two-degree-of-freedom exoskeleton ankle joint mechanism |
| CN103006362B (en)* | 2012-12-31 | 2015-02-11 | 李建军 | Knee-joint hinge of standing period control orthosis |
| US10137050B2 (en) | 2013-01-17 | 2018-11-27 | Rewalk Robotics Ltd. | Gait device with a crutch |
| TWI505822B (en)* | 2013-03-27 | 2015-11-01 | Ind Tech Res Inst | Walking assist device |
| CN103431977B (en)* | 2013-08-06 | 2016-05-18 | 朱金凤 | A kind of novel crutch that need not be hand steered |
| CN103610568B (en)* | 2013-12-16 | 2015-05-27 | 哈尔滨工业大学 | Human-simulated external skeleton robot assisting lower limbs |
| CN104027224A (en)* | 2014-06-27 | 2014-09-10 | 电子科技大学 | Elastic hip joint rotating device for exoskeleton robot |
| KR102250238B1 (en)* | 2014-08-18 | 2021-05-10 | 삼성전자주식회사 | A fixing module and a motion assist apparatus comprising thereof |
| CN104385263A (en)* | 2014-10-31 | 2015-03-04 | 上海交通大学 | Reinforcement type series-parallel lower limb exoskeleton |
| CN104523405A (en)* | 2014-12-05 | 2015-04-22 | 中国康复研究中心 | Energy storing type front-mounted rigid bracket walking aided exoskeleton |
| CN104758100B (en)* | 2015-04-28 | 2017-06-27 | 电子科技大学 | A control crutch used by an exoskeleton |
| CN105078708B (en) | 2015-06-12 | 2017-05-31 | 绍兴市上虞区幻想动力机器人科技有限公司 | A kind of exoskeleton robot follow-up control device |
| CN104983542B (en)* | 2015-07-24 | 2017-05-31 | 天津科技大学 | Exoskeleton-type rehabilitation servicing unit |
| CN105030486B (en)* | 2015-07-27 | 2017-03-01 | 燕山大学 | A kind of walk-aiding exoskeleton unpowered mechanical foot |
| CN105105896B (en)* | 2015-09-17 | 2016-11-30 | 武汉大学 | For the adjusting means that wearable lower limb exoskeleton robot is fixing with human body waist |
| WO2017064720A2 (en)* | 2015-10-16 | 2017-04-20 | Rewalk Robotics Ltd. | Apparatuses, systems and methods for controlling exoskeletons |
| TWI587850B (en)* | 2015-10-27 | 2017-06-21 | 陳佳麟 | Walking assistive assembly with the function of electric wheelchair |
| CN105213155B (en)* | 2015-10-29 | 2017-03-29 | 刘珩先 | A kind of artificial intelligence motion's auxiliary equipment |
| CN106726339A (en)* | 2015-11-20 | 2017-05-31 | 沈阳新松机器人自动化股份有限公司 | A kind of spring reverse motion and the leg training device using the spring reverse motion |
| CN105326627B (en)* | 2015-11-25 | 2018-04-13 | 华南理工大学 | Convalescence device walking trigger control method based on trunk centre-of gravity shift |
| CN106901947B (en)* | 2015-12-22 | 2023-08-18 | 中国科学院沈阳自动化研究所 | Wearable lower limb exoskeleton assisted walking robot mechanism |
| CN105411813A (en)* | 2015-12-29 | 2016-03-23 | 华南理工大学 | Wearable bionic exoskeleton mechanical leg rehabilitation device |
| CN108309707B (en)* | 2015-12-30 | 2020-01-31 | 江苏科凌医疗器械有限公司 | elastic walking aid |
| CN105520822B (en)* | 2016-01-27 | 2019-07-02 | 浙江海洋学院 | A kind of crutch of recovering aid |
| CN105616113B (en)* | 2016-02-23 | 2017-10-20 | 东南大学 | A kind of passive energy storage foot mechanism for lower limb assistance exoskeleton |
| CN105798893B (en)* | 2016-06-03 | 2017-09-12 | 河北工业大学 | One kind auxiliary heavy burden human body lower limbs ectoskeleton |
| CN106002950A (en)* | 2016-06-30 | 2016-10-12 | 张学衡 | Exoskeleton robot lower limb mechanism with adjustable length |
| CN106038178B (en)* | 2016-07-06 | 2019-08-16 | 清华大学 | A kind of vola in-wheel driving alternating walking exoskeleton device for paraplegia rehabilitation training |
| CN106109186B (en)* | 2016-08-31 | 2018-08-14 | 中国科学院深圳先进技术研究院 | Wearable lower limb exoskeleton robot |
| CN106361541A (en)* | 2016-10-14 | 2017-02-01 | 福州大学 | Knee joint load-bearing power assisting exoskeleton device and working method thereof |
| CN107802455B (en)* | 2016-10-27 | 2020-04-03 | 北京航空航天大学 | Bionic lower limb exoskeleton structure based on 3-RPR parallel mechanism |
| CN108143593A (en)* | 2016-12-02 | 2018-06-12 | 北京大艾机器人科技有限公司 | Adjustable waist support device and use its exoskeleton robot |
| CN106493716A (en)* | 2016-12-27 | 2017-03-15 | 浙江孚邦科技有限公司 | A kind of ectoskeleton joint drive structure |
| KR102193845B1 (en)* | 2017-05-25 | 2020-12-24 | 유.에스. 바이오닉스, 인크. | Adjustable torso and hip assembly for exoskeleton devices |
| CN107363811B (en)* | 2017-07-18 | 2020-11-20 | 深圳龙海特机器人科技有限公司 | Exoskeleton lower limb and wearable robot |
| CN107714400A (en)* | 2017-09-19 | 2018-02-23 | 安徽工程大学 | Guide the intelligent crutch control method of lower limb exoskeleton power-assisting robot walking |
| CN107773384B (en)* | 2017-11-02 | 2019-09-10 | 武汉大学 | A kind of variation rigidity lower limb exoskeleton robot |
| CN107811805B (en)* | 2017-11-16 | 2020-02-21 | 上海理工大学 | Wearable lower limb exoskeleton rehabilitation robot |
| CN108030645B (en)* | 2018-01-10 | 2024-02-13 | 山东科技大学 | A wearable lower limb mobile exoskeleton robot |
| CN108079504B (en)* | 2018-02-01 | 2021-09-21 | 广东迪特赛恩软件技术有限公司 | Medical treatment is with independent recovered physiotherapy device of walking |
| KR102514651B1 (en) | 2018-08-27 | 2023-03-28 | 삼성전자주식회사 | Insole and shoes comprising the same |
| KR102588072B1 (en) | 2018-08-27 | 2023-10-12 | 삼성전자주식회사 | Method for manufacturing an insole |
| CN109172288A (en)* | 2018-10-08 | 2019-01-11 | 巴中职业技术学院 | A kind of wearable running gear for lower limb rehabilitation training |
| KR102604085B1 (en) | 2018-12-12 | 2023-11-21 | 삼성전자주식회사 | Shoe type apparatus and control method thereof |
| CN109602582A (en)* | 2019-01-31 | 2019-04-12 | 深圳市迈步机器人科技有限公司 | A walking exoskeleton robot |
| CN109966119B (en)* | 2019-04-01 | 2021-02-02 | 漯河市第一人民医院 | Traction support device for orthopedic nursing |
| CN110393657B (en)* | 2019-07-14 | 2024-12-10 | 西安萨默尔机器人科技有限公司 | Exoskeleton lower limb assistive robot |
| CN110561457B (en)* | 2019-09-20 | 2020-05-05 | 嘉兴学院 | Cylinder-Based Humanoid Robot System |
| CN111281746A (en)* | 2020-03-07 | 2020-06-16 | 宿州学院 | A driving device of a lower limb rehabilitation robot |
| CN111658436B (en)* | 2020-07-01 | 2022-08-02 | 长春工业大学 | Knee joint exoskeleton rehabilitation robot mechanism based on integral tensioning structure |
| CN113230098A (en)* | 2021-06-11 | 2021-08-10 | 长春工业大学 | Six-degree-of-freedom wearable lower limb exoskeleton rehabilitation robot |
| CN115157216B (en)* | 2022-07-13 | 2024-08-02 | 重庆理工大学 | A motion-adaptive weight-bearing lower limb exoskeleton |
| CN118717483A (en)* | 2024-06-14 | 2024-10-01 | 中国科学院深圳先进技术研究院 | Lower limb powered exoskeleton device for rehabilitation assistance |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003284750A (en)* | 2002-03-27 | 2003-10-07 | Tama Tlo Kk | Walking assistive apparatus |
| CN1275578C (en)* | 2004-08-10 | 2006-09-20 | 浙江大学 | Lower limb walking external skeleton capable of being worn |
| CN101589983B (en)* | 2009-06-26 | 2011-05-18 | 北京工业大学 | Wearable lower limb exoskeleton device |
| CN101810532B (en)* | 2010-04-28 | 2011-11-09 | 河北工业大学 | Lower limbs rehabilitation training robot |
| CN102113949B (en)* | 2011-01-21 | 2013-04-17 | 上海交通大学 | Exoskeleton-wearable rehabilitation robot |
- 2011
- 2011-11-08CNCN201110350834.1Apatent/CN102499859B/ennot_activeExpired - Fee Related
Non-Patent Citations (1)
| Title |
|---|
| JP特开2003-284750A 2003.10.07 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102499859A (en) | 2012-06-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102499859B (en) | Lower limb exoskeleton walking rehabilitation robot | |
| CN104490568B (en) | Human lower extremity exoskeleton walking aid rehabilitation robot | |
| US10722416B2 (en) | Multi-posture lower limb rehabilitation robot | |
| CN203060231U (en) | Wearable lower limb exoskeleton walking-assisting robot | |
| CN103054692B (en) | Wearable lower limb exoskeleton walking-assisted robot | |
| CN108245372B (en) | Pneumatic muscle combined flexible rope driven three-degree-of-freedom ankle rehabilitation robot | |
| CN207370865U (en) | A kind of vertical lower limbs rehabilitation training robot | |
| CN111110519B (en) | A multi-sensing intelligent wearable lower limb exoskeleton robot | |
| CN100558322C (en) | Parallel articulated walking exoskeleton prosthesis for paralyzed patients | |
| CN106726358A (en) | A kind of vertical lower limbs rehabilitation training robot | |
| CN109009866A (en) | Sitting type lower limb exoskeleton rehabilitation robot | |
| CN105250117A (en) | Sitting walking lower limb exoskeleton | |
| CN107374911A (en) | A kind of intelligent medical robot for lower limb rehabilitation treatment | |
| CN101623547A (en) | Lower limb rehabilitation medical robot used for paralytic patient | |
| CN104490563A (en) | Pneumatic muscle based intelligent wearable lower limb | |
| CN108553271A (en) | A kind of MR damper sitting and lying formula lower limb rehabilitation robot | |
| CN215021755U (en) | Wearable exoskeleton hip joint rehabilitation robot | |
| CN108245840A (en) | A kind of planer-type leg training rehabilitation equipment | |
| CN102641195A (en) | Bed type lower limb external skeleton recovery robot | |
| CN108030645A (en) | A kind of wearable lower limb movement exoskeleton robot | |
| CN105997428A (en) | Lower-limb rehabilitation robot | |
| CN115245446A (en) | A knee joint exoskeleton with stiffness adjustment and energy recovery functions and its training method | |
| Jiang et al. | Recent advances on lower limb exoskeleton rehabilitation robot | |
| CN102302404B (en) | Walking type under-actuated three-degree of freedom ankle joint movement recovery exoskeleton | |
| CN112870021A (en) | A hip, knee and ankle active and passive training rehabilitation device based on four-bar linkage |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee | Granted publication date:20140416 |