CN102499726A - Close-distance minimally-invasive manipulator mechanism for nuclear magnetic resonance imaging environment - Google Patents
Close-distance minimally-invasive manipulator mechanism for nuclear magnetic resonance imaging environmentDownload PDFInfo
- Publication number
- CN102499726A CN102499726ACN2011103523924ACN201110352392ACN102499726ACN 102499726 ACN102499726 ACN 102499726ACN 2011103523924 ACN2011103523924 ACN 2011103523924ACN 201110352392 ACN201110352392 ACN 201110352392ACN 102499726 ACN102499726 ACN 102499726A
- Authority
- CN
- China
- Prior art keywords
- execution unit
- platform
- swing
- slider
- surgical needle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000007246mechanismEffects0.000titleclaimsabstractdescription63
- 238000013421nuclear magnetic resonance imagingMethods0.000titleclaimsabstractdescription6
- 238000001467acupunctureMethods0.000claimsabstractdescription39
- 238000006073displacement reactionMethods0.000claimsdescription10
- 229930040373ParaformaldehydeNatural products0.000claimsdescription6
- 229920006324polyoxymethylenePolymers0.000claimsdescription6
- 229920006351engineering plasticPolymers0.000claimsdescription3
- -1polyoxymethylenePolymers0.000claimsdescription3
- 230000001360synchronised effectEffects0.000claims1
- 238000002595magnetic resonance imagingMethods0.000description9
- 238000001356surgical procedureMethods0.000description4
- 238000003384imaging methodMethods0.000description2
- 238000000034methodMethods0.000description2
- 210000002307prostateAnatomy0.000description2
- 238000005481NMR spectroscopyMethods0.000description1
- 206010052428WoundDiseases0.000description1
- 208000027418Wounds and injuryDiseases0.000description1
- 230000009286beneficial effectEffects0.000description1
- 238000002725brachytherapyMethods0.000description1
- 239000003814drugSubstances0.000description1
- 230000000694effectsEffects0.000description1
- 230000003631expected effectEffects0.000description1
- 230000003902lesionEffects0.000description1
- 238000002324minimally invasive surgeryMethods0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 238000005457optimizationMethods0.000description1
- 210000000056organAnatomy0.000description1
- 239000002245particleSubstances0.000description1
- 230000008569processEffects0.000description1
- 230000005855radiationEffects0.000description1
- 230000002285radioactive effectEffects0.000description1
- 238000001959radiotherapyMethods0.000description1
- 210000004872soft tissueAnatomy0.000description1
- 230000000087stabilizing effectEffects0.000description1
- 230000000638stimulationEffects0.000description1
- 230000008093supporting effectEffects0.000description1
Images


Landscapes
- Finger-Pressure Massage (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及机械与医学交叉的前沿学科,尤其涉及一种应用于核磁共振环境下的针刺机械手机构。The invention relates to the cutting-edge discipline intersecting machinery and medicine, in particular to an acupuncture manipulator mechanism applied in a nuclear magnetic resonance environment.
背景技术Background technique
当前,前列腺手术的主要方法是微创近距离粒子放射治疗。手术过程通过针刺将放射性粒子植入前列腺,进行局部放射治疗。而通常手动执行的针刺手术,大多要面对精度差、无法实时成像的缺点;对于预先规划的轨迹,也可能会因为患者身体的移动和针刺对于器官的刺激,而无法实现预计的效果。Currently, the mainstay of prostate surgery is minimally invasive brachytherapy. During the surgical procedure, radioactive seeds are implanted into the prostate through acupuncture for localized radiation therapy. However, most of the manual acupuncture operations have to face the shortcomings of poor precision and incapability of real-time imaging; for pre-planned trajectories, the expected effect may not be achieved due to the movement of the patient's body and the stimulation of acupuncture on organs .
通过机器手或者机器手辅助是实现高精度针刺的手段。另外,核磁共振成像(MRI)与传统的X射线、CT相比,能够避免对健康细胞的X射线辐射,且有优良的软组织分辨力和精确的几何学特性,可以更加准确的探出病变区域,以确保合理的轨迹优化,并且对病变部分的判断更加准确,以确保植入粒子的位置精度。目前,还没有适用于核磁共振成像环境下的微创针刺手术设备。Robotic or robotic assistance is the means to achieve high-precision acupuncture. In addition, compared with traditional X-rays and CT, magnetic resonance imaging (MRI) can avoid X-ray radiation to healthy cells, and has excellent soft tissue resolution and precise geometric characteristics, which can detect diseased areas more accurately , to ensure a reasonable trajectory optimization, and more accurate judgment of the lesion, to ensure the positional accuracy of the implanted particles. At present, there is no minimally invasive acupuncture surgery device suitable for MRI environment.
发明内容Contents of the invention
针对上述现有技术,本发明提供一种用于核磁共振成像环境的近距离微创针刺机械手机构,本发明可以实现在有限的空间内提高核磁共振成像环境下针刺手术的精度,另外,本发明微创针刺机械手不但定位精准、灵活性好、创面微小,而且可以大大缩短手术时间,在很大程度上减轻了病人在手术过程中的痛苦。Aiming at the above-mentioned prior art, the present invention provides a short-distance minimally invasive acupuncture manipulator mechanism for MRI environments. The present invention can improve the accuracy of acupuncture operations in MRI environments in a limited space. In addition, The minimally invasive acupuncture manipulator of the present invention not only has precise positioning, good flexibility, and small wounds, but also can greatly shorten the operation time and greatly reduce the pain of the patient during the operation.
为了解决上述技术问题,本发明用于核磁共振成像环境的近距离微创针刺机械手机构予以实现的技术方案是:包括一手术针、三个平台和三个用于实现所述手术针五个自由度的执行单元;所述三个平台包括上层平台、中层平台和下层平台;三个执行单元包括连接于所述中层平台和所述下层平台之间的平动执行单元,连接于所述上层平台和所述中层平台之间的抬升执行单元,设置在所述上层平台上的针刺执行单元,所述三个执行单元的动作是相互独立的;其中:所述平动执行单元由两个滑块摆杆机构组成,每个滑块摆杆机构均分别由一气缸控制,当其中一个气缸运动时实现所述中层平台在水平面内的摆动,当两个气缸同步运动时实现中层平台在水平面内的移动,所述中层平台白摆动和移动中,通过光电编码器测量和计算气缸活塞的位移,从而实现闭环反馈;所述抬升执行单元由两套滑块摆杆机构组成,每套滑块摆杆机构均布置在手术针轴向的不同位置上,每套滑块摆杆机构包括两个共用一个气缸控制的滑块摆杆机构;该两套滑块摆杆机构是相互独立的,当其中一套滑块摆杆机构运动时实现所述上层平台在竖直面内的摆动,当两套滑块摆杆机构同步运动时实现所述上层平台的升降,所述上层平台在摆动和升降中,通过光电编码器测量和计算气缸活塞的位移,从而实现闭环反馈;所述针刺执行单元包括一超声波电机和由该超声波电机带动的一丝杠滑块机构,所述丝杠滑块机构带动手术针在手术针的轴向上作直线进给运动;所述平动执行单元和所述抬升执行单元的共同运动实现手术针空间位姿的调整,从而,手术针通过超声波电机的低速转动实现最终的针刺作业。In order to solve the above-mentioned technical problems, the technical solution of the present invention for the short-distance minimally invasive acupuncture manipulator mechanism used in the nuclear magnetic resonance imaging environment is to include a surgical needle, three platforms and three The execution unit of the degree of freedom; the three platforms include an upper platform, a middle platform and a lower platform; the three execution units include a translation execution unit connected between the middle platform and the lower platform, and are connected to the upper platform The lifting execution unit between the platform and the middle platform, the acupuncture execution unit arranged on the upper platform, the actions of the three execution units are independent of each other; wherein: the translation execution unit consists of two Each slider swing mechanism is controlled by a cylinder. When one of the cylinders moves, the middle platform swings in the horizontal plane. When the two cylinders move synchronously, the middle platform swings in the horizontal plane. During the swing and movement of the middle platform, the displacement of the cylinder piston is measured and calculated by the photoelectric encoder, so as to realize the closed-loop feedback; the lifting execution unit is composed of two sets of slider swing rod mechanisms, and each set of slider The swing rod mechanisms are arranged at different positions in the axial direction of the surgical needle. Each set of slider swing rod mechanisms includes two slider swing rod mechanisms controlled by a common cylinder; the two sets of slider swing rod mechanisms are independent of each other. The swing of the upper platform in the vertical plane is realized when one set of slider pendulum mechanism moves, and the lifting of the upper platform is realized when the two sets of slider pendulum mechanisms move synchronously, and the upper platform is swinging and lifting Among them, the displacement of the cylinder piston is measured and calculated by the photoelectric encoder, so as to realize closed-loop feedback; the acupuncture execution unit includes an ultrasonic motor and a screw slider mechanism driven by the ultrasonic motor, and the screw slider mechanism drives The surgical needle makes a linear feed motion in the axial direction of the surgical needle; the joint movement of the translation actuator unit and the lifting actuator unit realizes the adjustment of the spatial posture of the surgical needle, so that the surgical needle is realized by the low-speed rotation of the ultrasonic motor. The final needling job.
本发明用于核磁共振成像环境的近距离微创针刺机械手机构中的所有零部件均采用高强度工程塑料聚甲醛(POM)制造。All components in the short-distance minimally invasive acupuncture manipulator mechanism used in the nuclear magnetic resonance imaging environment of the present invention are made of high-strength engineering plastic polyoxymethylene (POM).
与现有技术相比,本发明的有益效果是:Compared with prior art, the beneficial effect of the present invention is:
本发明中的平动执行单元和抬升执行单元共同运动可实现整个机构的上下、左右、倾斜、摇摆四个自由度的运动,从而实现手术针空间位姿的调整;并通过针刺执行单元中的超声波电机的低速转动,最终实现手术针的针刺作业。The joint motion of the translation actuator unit and the lifting actuator unit in the present invention can realize the movement of the four degrees of freedom of the whole mechanism, such as up and down, left and right, tilt, and swing, thereby realizing the adjustment of the spatial posture of the surgical needle; and through the acupuncture actuator unit The low-speed rotation of the advanced ultrasonic motor finally realizes the acupuncture operation of the surgical needle.
由于本发明针刺机械手机构中平动和抬升执行单元中的气缸活塞的推力直接作用于相关连的滑块摆杆机构中的滑块中心位置,其受力合理,有效的防止滑块变形,进一步保证了手术针进给的精度;中层平台采用四点支撑,即两套滑块摆杆机构中的主动摆杆与被动摆杆共同支撑中层平台,使中层平台的运动更加稳定;抬升执行单元布置于平动执行单元之上,从而减小了平动执行单元中位于底层的气缸所需的推力,使机构的运动更加灵活。Since the thrust of the cylinder piston in the translation and lifting actuator unit in the acupuncture manipulator mechanism of the present invention directly acts on the center position of the slider in the associated slider pendulum mechanism, the force is reasonable and the deformation of the slider is effectively prevented. The accuracy of surgical needle feeding is further ensured; the middle platform adopts four-point support, that is, the active swing rod and the passive swing rod in the two sets of slider swing rod mechanisms support the middle platform together, making the movement of the middle platform more stable; lifting the execution unit Arranged on the translation actuator unit, thereby reducing the thrust required by the cylinder at the bottom of the translation actuator unit, making the movement of the mechanism more flexible.
本发明能够在核磁仪有限空间内辅助完成针刺手术,克服手术过程中成像效果不及时和轨迹规划难的弊端,能够极大程度的提高手术的精度、手术的成功性和完善性,从而为核磁共振成像(MRI)引导机器人辅助微创外科手术开辟了新途径。The present invention can assist in the completion of acupuncture surgery in the limited space of the nuclear magnetic instrument, overcome the disadvantages of untimely imaging effect and difficult trajectory planning during the operation process, and can greatly improve the accuracy, success and perfection of the operation, thereby providing Magnetic resonance imaging (MRI)-guided robot-assisted minimally invasive surgery opens new avenues.
附图说明Description of drawings
图1是本发明用于核磁共振成像环境的近距离微创针刺机械手机构的结构立体图;Fig. 1 is a structural perspective view of the short-distance minimally invasive acupuncture manipulator mechanism used in the MRI environment of the present invention;
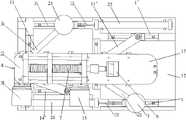
图2是图1所示微创针刺机械手机构的主视图;Fig. 2 is a front view of the minimally invasive acupuncture mechanism shown in Fig. 1;
图3是图1所示微创针刺机械手机构的俯视图。Fig. 3 is a top view of the mechanism of the minimally invasive acupuncture manipulator shown in Fig. 1 .
图中:In the picture:

具体实施方式Detailed ways
下面结合具体实施方式对本发明作进一步详细地描述。The present invention will be further described in detail below in combination with specific embodiments.
如图1所示,本发明一种用于核磁共振成像环境的近距离微创针刺机械手机构,包括一手术针8、三个平台和三个用于实现所述手术针五个自由度的执行单元。As shown in Fig. 1, a kind of short-distance minimally invasive acupuncture manipulator mechanism used in the MRI environment of the present invention includes a
所述三个平台包括上层平台17、中层平台10和下层平台12;三个执行单元包括连接于所述中层平台10和所述下层平台12之间的平动执行单元,连接于所述上层平台17和所述中层平台10之间的抬升执行单元,设置在所述上层平台17上的针刺执行单元,所述三个执行单元的动作是相互独立的。The three platforms include an
所述平动执行单元由两个滑块摆杆机构组成,每个滑块摆杆机构均分别由一气缸控制,当两个气缸25、26中的一个气缸运动时实现所述中层平台10在水平面内的摆动,当两个气缸25、26同步运动时实现中层平台10在水平面内的移动,所述中层平台在摆动和移动中,通过分别与气缸活塞13、19相连的光电编码器23、3测量并计算气缸活塞13、19的位移,从而实现闭环反馈。The translation execution unit is composed of two slider swing mechanism, each slider swing mechanism is controlled by a cylinder, when one of the two
所述抬升执行单元由两套滑块摆杆机构组成,每套滑块摆杆机构均布置在手术针8轴向的不同位置上,每套滑块摆杆机构包括两个共用一个气缸控制的滑块摆杆机构;该两套滑块摆杆机构是相互独立的,当其中一套滑块摆杆机构运动时实现所述上层平台17在竖直面内的摆动,当两套滑块摆杆机构同步运动时实现所述上层平台17的升降,所述上层平台17在摆动和升降中,通过分别与气缸活塞22、24光电编码器测量并计算气缸活塞22、24的位移,从而实现闭环反馈。The lifting execution unit is composed of two sets of slider swing rod mechanisms, each set of slider swing rod mechanisms are arranged at different positions in the axial direction of the
所述针刺执行单元包括一超声波电机6和由该超声波电机6带动的一丝杠滑块机构,所述丝杠滑块机构带动手术针8在手术针的轴向上作直线进给运动。The acupuncture execution unit includes an
所述平动执行单元和所述抬升执行单元的共同运动实现手术针8空间位姿的调整,从而,手术针8通过超声波电机6的低速转动实现最终的针刺作业。The common movement of the translation execution unit and the lifting execution unit realizes the adjustment of the spatial posture of the
本发明机构中的所有另部件均采用高强度工程塑料聚甲醛(POM)制造。All other components in the mechanism of the present invention are made of high-strength engineering plastic polyoxymethylene (POM).
以下结合附图对本发明用于核磁共振成像环境的近距离微创针刺机械手机构的工作方式。The working mode of the short-distance minimally invasive acupuncture manipulator mechanism used in the MRI environment of the present invention is described below in conjunction with the accompanying drawings.
平移运动:如图1和图3所示,本发明中的平动执行单元由两个滑块摆杆机构组成,每个滑块摆杆机构均分别由一气缸控制,当其中一个气缸运动时实现所述中层平台10在水平面内的摆动,当两个气缸25、26同步运动时实现中层平台10在水平面内的移动。即:通过控制与气泵相连的气缸25,从而使气缸活塞13推动滑块沿X向直线导轨14移动,进而实现主动摆杆16的摆动,以达到使中层平台10摆动,光电编码器23测量气缸活塞13的位移,实现闭环反馈;与此同时,通过控制与气泵相连的气缸26,从而使气缸活塞19推动主动滑块2沿X向直线导轨1移动,进而实现主动摆杆20的摆动,以达到机构中层平台10的摆动,光电编码器3测量气缸活塞19的位移,实现闭环反馈。当两个气缸异步运动时,可实现中层平台10在水平面内的摆动。Translational movement: as shown in Figure 1 and Figure 3, the translational execution unit in the present invention is composed of two slider pendulum mechanisms, each slider pendulum mechanism is controlled by a cylinder, when one of the cylinders moves The swing of the
抬升运动:如图1和图2所示,通过控制与气泵相连的气缸5使气缸活塞22推动滑块沿直线导轨移动,进而实现抬升摆杆9的摆动,以达到机构以前部为轴的抬升,光电编码器18通过测量铰链的旋转,计算得到气缸活塞22的位移,实现闭环反馈。同理,控制与气泵相连的气缸27使气缸活塞24推动滑块沿沿导轨移动,实现抬升摆杆4的摆动,以达到机构以后部为轴的摆动,光电编码器15通过测量铰链的旋转,计算得到气缸活塞24的位移,实现闭环反馈。当两气缸同步运动时,可实现上层平台17的竖直面内抬升;当两气缸异步运动时,可实现上层平台17的竖直面内摆动。Lifting movement: as shown in Figure 1 and Figure 2, by controlling the
针刺运动:通过超声波电机6,使丝杠滑块机构的丝杠7带动手术针8运动,将运动和力传给手术针8的针尖,从而实现针刺作业。Acupuncture movement: through the
综上,本发明针刺机械手机构通过上述的平移和抬升运动的配合,实现手术针8空间位姿的调整;通过针刺运动,最终实现针刺作业。本发明针刺机械手机构的优势是:To sum up, the acupuncture manipulator mechanism of the present invention realizes the adjustment of the spatial posture of the
(1)本发明中的各滑块摆杆机构均由气缸控制,而气缸活塞杆的推力直接作用于相关联滑块的中心位置,受力合理,防止滑块变形;(1) each slide block pendulum mechanism among the present invention is all controlled by cylinder, and the thrust of cylinder piston rod directly acts on the central position of associated slide block, and the force is reasonable, prevents slide block from deforming;
(2)采用四点支撑,即两套主动摆杆与被动摆杆固定于下层平台12上,共同支撑中层平台10,使中层平台10的运动更加稳定,即:两套被动杆11’、11推动滑块分别沿X向直线导轨1’、14’运动,实现支撑稳定作用;(2) Four-point support is adopted, that is, two sets of active swing rods and passive swing rods are fixed on the
(3)抬升执行单元布置于平动执行单元之上,减小了下底层气缸所需的推力,使运动更加灵活。(3) The lifting execution unit is arranged above the translation execution unit, which reduces the thrust required by the lower cylinder and makes the movement more flexible.
尽管上面结合图对本发明进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨的情况下,还可以作出很多变形,这些均属于本发明的保护之内。Although the present invention has been described above in conjunction with the drawings, the present invention is not limited to the above-mentioned specific embodiments, and the above-mentioned specific embodiments are only illustrative, rather than restrictive. Under the inspiration, many modifications can be made without departing from the gist of the present invention, and these all belong to the protection of the present invention.
Claims (2)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2011103523924ACN102499726A (en) | 2011-11-09 | 2011-11-09 | Close-distance minimally-invasive manipulator mechanism for nuclear magnetic resonance imaging environment |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2011103523924ACN102499726A (en) | 2011-11-09 | 2011-11-09 | Close-distance minimally-invasive manipulator mechanism for nuclear magnetic resonance imaging environment |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN102499726Atrue CN102499726A (en) | 2012-06-20 |
Family
ID=46211907
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2011103523924APendingCN102499726A (en) | 2011-11-09 | 2011-11-09 | Close-distance minimally-invasive manipulator mechanism for nuclear magnetic resonance imaging environment |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN102499726A (en) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103330594A (en)* | 2013-06-27 | 2013-10-02 | 苏州边枫电子科技有限公司 | Auxiliary puncture needle feeding device driven by stepping motor |
| CN103385746A (en)* | 2013-06-27 | 2013-11-13 | 苏州边枫电子科技有限公司 | Auxiliary needle feeding device for puncture needle |
| CN103750908A (en)* | 2014-02-10 | 2014-04-30 | 陈仕林 | Movable needle inserting table |
| CN105640648A (en)* | 2016-03-16 | 2016-06-08 | 北京理工大学 | Pose mechanical-adjusting movable platform |
| CN110074865A (en)* | 2016-11-01 | 2019-08-02 | 香港生物医学工程有限公司 | For executing surgical robot that is minimally invasive and acting through natural cavity endoscopic surgery and system |
| CN110623712A (en)* | 2019-11-04 | 2019-12-31 | 诸葛雪朋 | Auxiliary device for thoracocentesis |
| CN114748143A (en)* | 2022-04-20 | 2022-07-15 | 哈尔滨理工大学 | Flexible needle puncture robot |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5078140A (en)* | 1986-05-08 | 1992-01-07 | Kwoh Yik S | Imaging device - aided robotic stereotaxis system |
| CN1288785A (en)* | 2000-10-24 | 2001-03-28 | 深圳市金达科技实业有限公司 | Flexible mechanism driven hydraulic balanced oscillating stock |
| CN101791451A (en)* | 2010-04-01 | 2010-08-04 | 天津大学 | Acupuncture manipulator mechanism for applying to magnetic nuclear resonance environment |
| WO2011057260A2 (en)* | 2009-11-09 | 2011-05-12 | Worcester Polytechnic Institute | Apparatus and methods for mri-compatible haptic interface |
| CN102113905A (en)* | 2011-01-25 | 2011-07-06 | 天津大学 | Novel acupuncture surgery manipulator mechanism in nuclear magnetic resonance environment |
- 2011
- 2011-11-09CNCN2011103523924Apatent/CN102499726A/enactivePending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5078140A (en)* | 1986-05-08 | 1992-01-07 | Kwoh Yik S | Imaging device - aided robotic stereotaxis system |
| CN1288785A (en)* | 2000-10-24 | 2001-03-28 | 深圳市金达科技实业有限公司 | Flexible mechanism driven hydraulic balanced oscillating stock |
| WO2011057260A2 (en)* | 2009-11-09 | 2011-05-12 | Worcester Polytechnic Institute | Apparatus and methods for mri-compatible haptic interface |
| CN101791451A (en)* | 2010-04-01 | 2010-08-04 | 天津大学 | Acupuncture manipulator mechanism for applying to magnetic nuclear resonance environment |
| CN102113905A (en)* | 2011-01-25 | 2011-07-06 | 天津大学 | Novel acupuncture surgery manipulator mechanism in nuclear magnetic resonance environment |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103330594A (en)* | 2013-06-27 | 2013-10-02 | 苏州边枫电子科技有限公司 | Auxiliary puncture needle feeding device driven by stepping motor |
| CN103385746A (en)* | 2013-06-27 | 2013-11-13 | 苏州边枫电子科技有限公司 | Auxiliary needle feeding device for puncture needle |
| CN103750908A (en)* | 2014-02-10 | 2014-04-30 | 陈仕林 | Movable needle inserting table |
| CN105640648A (en)* | 2016-03-16 | 2016-06-08 | 北京理工大学 | Pose mechanical-adjusting movable platform |
| CN105640648B (en)* | 2016-03-16 | 2018-06-29 | 北京理工大学 | A kind of pose mechanical conditioning type moveable platform |
| CN110074865A (en)* | 2016-11-01 | 2019-08-02 | 香港生物医学工程有限公司 | For executing surgical robot that is minimally invasive and acting through natural cavity endoscopic surgery and system |
| CN110074865B (en)* | 2016-11-01 | 2021-07-30 | 香港生物医学工程有限公司 | Surgical robotic devices and systems for performing minimally invasive and natural orifice endoscopic surgical maneuvers |
| CN110623712A (en)* | 2019-11-04 | 2019-12-31 | 诸葛雪朋 | Auxiliary device for thoracocentesis |
| CN114748143A (en)* | 2022-04-20 | 2022-07-15 | 哈尔滨理工大学 | Flexible needle puncture robot |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102113905B (en) | Novel acupuncture surgery manipulator mechanism in nuclear magnetic resonance environment | |
| CN102499726A (en) | Close-distance minimally-invasive manipulator mechanism for nuclear magnetic resonance imaging environment | |
| CN104146772B (en) | A kind of robot for the accurate diagnosis and treatment of jaw face disease | |
| CN109771811B (en) | A Parallel Robot for Prostate Flexible Needle Particle Implantation | |
| CN102921099B (en) | Short-distance particle implantation robot based on ultrasonic image navigation | |
| US11110302B2 (en) | Multi-robotic arm apparatus for intraoperative radiotherapy | |
| CN102258826B (en) | Five degrees of freedom minimally invasive acupuncture surgery guidance mechanism | |
| US11931120B2 (en) | Targeted seed implanting robot suitable for clinical treatment of a human patient in the lithotomy position | |
| CN107789059B (en) | A kind of minimally invasive abdominal operation robot | |
| CN103417303B (en) | Based on the nuclear magnetism compatibility surgical robot of silk transmission | |
| CN204709657U (en) | A kind of accurately pendulum position therapeutic bed | |
| CN110974366B (en) | Minimally invasive customized puncture guiding device and puncture positioning optimization method | |
| CN103027818A (en) | Close-range seed implantation robot and bed connection-type automatic control operating table | |
| CN108392253B (en) | Automatic puncture device for floor type tumor radioactive particle implantation treatment | |
| CN105126261A (en) | Radiotherapy device for tracking and positioning by using Stewart robot platform | |
| CN101791451A (en) | Acupuncture manipulator mechanism for applying to magnetic nuclear resonance environment | |
| Jiang et al. | Kinematic analysis of a 5-DOF hybrid-driven MR compatible robot for minimally invasive prostatic interventions | |
| CN110141317B (en) | Multi-needle automatic puncture device for tumor radioactive particle implantation treatment | |
| CN112691286A (en) | Hand-simulated prostate particle implantation robot and use method thereof | |
| CN104825231B (en) | A kind of minimally invasive intervention operation robot of guided by magnetic resonance breast cancer and its control method | |
| CN103706042B (en) | Four-dimensional tracking radiotherapy system | |
| CN201959412U (en) | Novel nuclear magnetic compatible operation mechanism for close-range particle radiotherapy | |
| CN219700856U (en) | Ultrasonic-guided short-distance radioactive treatment prostate intervention robot | |
| CN114748143B (en) | Flexible needle puncture robot | |
| CN210541748U (en) | Multi-needle automatic puncture device for tumor radioactive particle implantation treatment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication | Application publication date:20120620 |