CN102175221B - Vehicle-mounted mobile photographic surveying system based on fisheye lens - Google Patents
Vehicle-mounted mobile photographic surveying system based on fisheye lensDownload PDFInfo
- Publication number
- CN102175221B CN102175221BCN201110023561.XACN201110023561ACN102175221BCN 102175221 BCN102175221 BCN 102175221BCN 201110023561 ACN201110023561 ACN 201110023561ACN 102175221 BCN102175221 BCN 102175221B
- Authority
- CN
- China
- Prior art keywords
- unit
- fisheye
- image
- point
- homography matrix
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Image Processing (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及一种车载移动摄影测量系统,尤其涉及利用鱼眼镜头快速采集影像数据,通过立体视觉校正,对所获取的影像数据进行实时测量和三维建模的系统。The invention relates to a vehicle-mounted mobile photogrammetry system, in particular to a system for rapidly collecting image data with a fisheye lens, and performing real-time measurement and three-dimensional modeling on the acquired image data through stereo vision correction.
背景技术Background technique
随着城市化进程的加快,城市规模越来越大,变化日新月异,城市规划和管理变得越来越复杂,对于交通、能源、市政管理、基础设施建设等各个领域,信息的采集和更新显得尤为重要,特别是具有带有GIS信息的测量,成为这些领域信息获取不可或缺的一部分。比如,城市管理部门采集和统计城市各类资产数据,如区域内建筑的信息,广告牌位置、数量、长宽高等数据;道路交通部门统计道路资产数据;能源部门统计变电站的位置、数量等信息。这些数据通常都有数据量大,统计复杂的特点。如果使用人工实地测量统计的方式,工作量大,效率低,危险性高,并且容易出错。With the acceleration of the urbanization process, the scale of the city is getting bigger and bigger, the changes are changing with each passing day, and the urban planning and management are becoming more and more complicated. For various fields such as transportation, energy, municipal management, and infrastructure construction, the collection and update of information is becoming more and more important. It is especially important, especially to have measurements with GIS information, to become an integral part of information acquisition in these fields. For example, the city management department collects and counts various asset data in the city, such as building information in the area, billboard location, quantity, length, width and height data; the road traffic department collects and counts road asset data; the energy department counts information such as the location and quantity of substations . These data usually have the characteristics of large amount of data and complex statistics. If the method of manual field measurement and statistics is used, the workload is heavy, the efficiency is low, the risk is high, and it is easy to make mistakes.
目前市场存在的测量系统包括激光测量和立体视觉测量。激光测量,通常没有图像的色彩信息,分辨率低,数据量大,采集范围有限,后处理复杂耗时。而现有的立体视觉测量设备,都基于普通的相机,视野范围小,城市环境中高楼大厦鳞次栉比,比如拍摄城市中的高楼大厦,当距离很近时,只能拍到楼的一部分,如果要拍摄到整个大楼,则需要距离目标很远,这样影响目标物体的成像精度,如果要做基于图像的测量,则会影响到测量的精度,造成很大的误差。因此传统相机立体视觉测量系统受到极大挑战。Measurement systems that currently exist in the market include laser measurement and stereo vision measurement. Laser measurement usually has no image color information, low resolution, large amount of data, limited acquisition range, complex and time-consuming post-processing. However, the existing stereoscopic vision measurement equipment is based on ordinary cameras with a small field of view. There are many high-rise buildings in the urban environment. To capture the entire building, you need to be far away from the target, which affects the imaging accuracy of the target object. If you want to do image-based measurement, it will affect the measurement accuracy and cause a large error. Therefore, the traditional camera stereo vision measurement system is greatly challenged.
随着摄影器材的发展,出现一种具有超大视野范围的超广角镜头,鱼眼镜头,能在单张的鱼眼图像中实现视野范围达到甚至超过180度。同样是拍摄城市中的高楼大厦,鱼眼镜头能够同时保证目标物体的视野范围和精度,可以很好地解决大范围大视角的拍摄和测量的问题。With the development of photographic equipment, a super wide-angle lens with a large field of view, fisheye lens, can achieve a field of view of 180 degrees or even exceed 180 degrees in a single fisheye image. The same is to shoot high-rise buildings in the city. The fisheye lens can ensure the field of view and accuracy of the target object at the same time, and can well solve the problem of shooting and measuring in a large range and a large angle of view.
不过鱼眼镜头在获得很大的视野范围的同时,也给图像带来了很大的畸变,一般来说,视野范围越大,畸变也越大。传统的立体视觉测量是基于微小畸变的普通相机进行测量的,无法用大畸变的鱼眼相机进行测量。对配备普通镜头的相机来说,其成像原理类似于通常所说的针孔成像。在针孔成像中,光线是沿直线(线性)传播的。其优点是成像畸变很小甚至可以忽略,但其缺点也很明显,即视野范围(FOV)很小。对于大场景尤其是180度的无限场景来说,要通过基于光线直线传播的普通镜头在感光器件上成像的话,必须要求感光器件无限大,这在实际中显然是不可能实现的。因此只有改变光线的传播方向,让其进入镜头后不再沿直线传播,而是沿曲线(非线性)投射到感光器件上,这样就可以在有限的感光器件上容纳无限的场景,鱼眼镜头就是这样做的。但光线的曲线传播同时也带来几个问题:首先,由于光线是沿曲线传播的,这给确定其传播路径带来很大的困难。其次,虽然都是沿曲线传播,但不同视角范围内的光线其传播路径的曲率是不一样的,视角越大,曲率越大。表现在图像中,就是越靠近镜头中心图像畸变越小,越靠近镜头边缘图像畸变越大。因此给所有视角范围内的光线确定一个统一的传播模型就变得更加困难。再次,由于镜头边缘的畸变太大,图像边缘上的几个像素所包含的内容相当于图像中心处数十个甚至上百个像素所包含的内容。因此在图像边缘上一个像素的偏差相当于图像中心处数十上百个像素的偏差,这给模型的精确性带来了非常大的挑战。综上所述,鱼眼镜头目前只应用于安防监控等单纯需要大视角信息的场合,却很少用于测量或者三维建模等对精度要求高的场合。However, while the fisheye lens obtains a large field of view, it also brings great distortion to the image. Generally speaking, the larger the field of view, the greater the distortion. The traditional stereo vision measurement is based on the ordinary camera with small distortion, which cannot be measured with the fisheye camera with large distortion. For a camera equipped with an ordinary lens, its imaging principle is similar to the so-called pinhole imaging. In pinhole imaging, light travels in straight lines (linear). Its advantage is that the imaging distortion is small or even negligible, but its disadvantage is also obvious, that is, the field of view (FOV) is very small. For large scenes, especially 180-degree infinite scenes, if an ordinary lens based on the straight line propagation of light is used to form an image on a photosensitive device, the photosensitive device must be infinitely large, which is obviously impossible to achieve in practice. Therefore, the only way to change the direction of propagation of light is to let it enter the lens and no longer travel along a straight line, but to project onto the photosensitive device along a curve (non-linear), so that unlimited scenes can be accommodated on a limited photosensitive device. Fisheye lens That's what it does. However, the curved propagation of light also brings several problems: first, since the light propagates along the curve, it brings great difficulties to determine its propagation path. Secondly, although they all propagate along the curve, the curvature of the propagation path of light in different viewing angles is different. The larger the viewing angle, the greater the curvature. It is manifested in the image, that is, the closer to the center of the lens, the smaller the image distortion, and the closer to the edge of the lens, the greater the image distortion. It thus becomes more difficult to determine a uniform propagation model for rays in all viewing angles. Again, due to the large distortion at the edge of the lens, a few pixels on the edge of the image contain as much content as dozens or even hundreds of pixels in the center of the image. Therefore, the deviation of one pixel on the edge of the image is equivalent to the deviation of tens or hundreds of pixels at the center of the image, which poses a great challenge to the accuracy of the model. To sum up, fisheye lenses are currently only used in security monitoring and other occasions that simply require large viewing angle information, but are rarely used in measurement or 3D modeling and other occasions that require high precision.
通过对鱼眼相机进行精确数学建模来获取鱼眼相机的精确成像参数(光线的传播路径),进一步地获取鱼眼相机立体视觉对的参数(鱼眼相机间的旋转和平移),就可以运用大畸变的鱼眼相机来实现立体视觉测量。这个获取鱼眼相机的成像参数以及鱼眼相机立体视觉对参数的过程称之为鱼眼相机立体视觉对的标定。普通相机的标定已有非常成熟的解决方案,比如张正友、Tsai的方法。然而因为成像原理不同,这些方法不能用于标定鱼眼镜头,必须找到新的数学模型来描述鱼眼镜头的成像过程。近来出现一种基于多项式拟合的技术较好地解决了这一问题。By performing precise mathematical modeling on the fisheye camera to obtain the precise imaging parameters of the fisheye camera (the propagation path of light), and further obtain the parameters of the stereoscopic vision pair of the fisheye camera (rotation and translation between fisheye cameras), you can A large distortion fisheye camera is used to realize stereo vision measurement. The process of obtaining the imaging parameters of the fisheye camera and the parameters of the stereoscopic vision pair of the fisheye camera is called the calibration of the stereoscopic vision pair of the fisheye camera. There are very mature solutions for the calibration of ordinary cameras, such as the methods of Zhang Zhengyou and Tsai. However, due to the different imaging principles, these methods cannot be used to calibrate fisheye lenses, and a new mathematical model must be found to describe the imaging process of fisheye lenses. Recently, a technology based on polynomial fitting has appeared to solve this problem better.
如果能解决上述问题,提供一个基于鱼眼镜头的立体视觉的测量系统解决方案,即可以解决现有测量系统视野范围小、无法在测量的同时获取全面的彩色影像等问题,将为城市管理、能源、统计、勘测等各部门的数据采集和测量提供一种全新而简便的集成化解决方案,为城市的数字化建设提供新的解决方案。If the above problems can be solved, a fisheye lens-based stereo vision measurement system solution can be provided, which can solve the problems of the existing measurement system such as the small field of view and the inability to obtain comprehensive color images while measuring, which will provide urban management, It provides a new and simple integrated solution for data collection and measurement of various departments such as energy, statistics, surveying, etc., and provides a new solution for the digital construction of the city.
发明内容Contents of the invention
本发明的目的在于解决上述问题,提供了一种基于鱼眼镜头的车载移动摄影测量系统,能克服上述不足,达到测量范围大、影像色彩信息丰富完整的特点。The purpose of the present invention is to solve the above problems and provide a vehicle-mounted mobile photogrammetry system based on a fisheye lens, which can overcome the above shortcomings and achieve the characteristics of large measurement range and rich and complete image color information.
本发明的技术方案为:本发明揭示了一种基于鱼眼镜头的车载移动摄影测量系统,包括数据采集装置、数据存储装置和数据处理装置,其中:The technical solution of the present invention is: the present invention discloses a vehicle-mounted mobile photogrammetry system based on a fisheye lens, including a data acquisition device, a data storage device and a data processing device, wherein:
数据采集装置,用于采集影像和数据,其包括鱼眼相机立体视觉模块,用于采集鱼眼图像信息,鱼眼相机立体视觉模块包括鱼眼镜头、相机以及标定装置,其中:The data acquisition device is used to collect images and data, and it includes a fisheye camera stereo vision module for collecting fisheye image information. The fisheye camera stereo vision module includes a fisheye lens, a camera and a calibration device, wherein:
鱼眼镜头,与相机连接,获取鱼眼影像;Fisheye lens, connected with the camera, to obtain fisheye images;
相机,与鱼眼镜头连接,接收鱼眼镜头获取的鱼眼影像并进行影像采集;The camera is connected with the fisheye lens, receives the fisheye image acquired by the fisheye lens and collects the image;
标定装置,获取鱼眼镜头的成像参数以及鱼眼镜头立体视觉对参数;A calibration device for obtaining imaging parameters of the fisheye lens and stereoscopic vision pair parameters of the fisheye lens;
数据存储装置,耦接数据采集装置,用于存储采集到的影像数据;A data storage device, coupled to the data acquisition device, for storing the collected image data;
数据处理装置,耦接数据存储装置,用于处理所采集到的数据,实现对鱼眼影像的测量。The data processing device, coupled with the data storage device, is used to process the collected data and realize the measurement of the fisheye image.
根据本发明的基于鱼眼镜头的车载移动摄影测量系统的一实施例,数据采集装置还包括:According to an embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention, the data acquisition device also includes:
车辆位姿获取模块,用于获取车辆的位置、姿态、运行距离的信息;The vehicle pose acquisition module is used to acquire information about the position, attitude, and running distance of the vehicle;
数据存储装置还存储车辆位姿获取模块得到的车辆的位置、姿态、运行距离的信息。The data storage device also stores information on the vehicle's position, attitude, and running distance obtained by the vehicle pose acquisition module.
根据本发明的基于鱼眼镜头的车载移动摄影测量系统的一实施例,数据采集装置还包括:According to an embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention, the data acquisition device also includes:
全景采集模块,用于采集连续的道路全景影像。The panorama acquisition module is used to acquire continuous road panorama images.
根据本发明的基于鱼眼镜头的车载移动摄影测量系统的一实施例,鱼眼相机立体视觉模块至少包括两台鱼眼相机。According to an embodiment of the vehicle-mounted mobile photogrammetry system based on a fisheye lens of the present invention, the fisheye camera stereo vision module includes at least two fisheye cameras.
根据本发明的基于鱼眼镜头的车载移动摄影测量系统的一实施例,标定装置包括:According to an embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention, the calibration device includes:
鱼眼成像关系建立模块,建立半单位球面模型,并在单位球面模型上建立鱼眼成像关系;The fisheye imaging relationship building module establishes a semi-unit spherical model and establishes a fisheye imaging relationship on the unit spherical model;
初始化内参模块,耦接鱼眼成像关系建立模块,初始化内参,其中内参是鱼眼相机自身的参数,与外部环境无关;Initialize the internal reference module, couple the fisheye imaging relationship establishment module, and initialize the internal reference, where the internal reference is the parameter of the fisheye camera itself and has nothing to do with the external environment;
单应矩阵计算模块,耦接初始化内参模块,计算单应矩阵;The homography matrix calculation module, coupled with the initialization internal reference module, calculates the homography matrix;
初始化外参模块,耦接单应矩阵计算模块,初始化外参,其中外参是鱼眼相机与外部环境之间的参数;Initialize the external parameter module, couple the homography matrix calculation module, and initialize the external parameter, where the external parameter is the parameter between the fisheye camera and the external environment;
迭代优化模块,耦接初始化外参模块,LM迭代最小化重投影误差,得到优化后的内参与外参。The iterative optimization module is coupled with the initialization extrinsic parameter module, and the LM iteratively minimizes the reprojection error to obtain the optimized internal and external parameters.
根据本发明的基于鱼眼镜头的车载移动摄影测量系统的一实施例,鱼眼成像关系建立模块的处理如下:According to an embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention, the processing of the fisheye imaging relationship establishment module is as follows:
记空间中某一点x在鱼眼图像上的成像点为(u,v),空间点x指向单位球球心的入射角度为

r(θ)=k1θ+k2θ2+k3θ3+k4θ4+k5θ5+...knθn (1)r(θ)=k1 θ+k2 θ2 +k3 θ3 +k4 θ4 +k5 θ5 +...kn θn (1)
r表示图像上的某个像素点到图像主点的距离,k1,...kn是鱼眼镜头的成像参数;r represents the distance from a certain pixel on the image to the main point of the image, k1 ,... kn are the imaging parameters of the fisheye lens;
Δr表示鱼眼镜头的径向畸变,l1,...ln,i1,...i4为径向畸变参数;Δr represents the radial distortion of the fisheye lens, l1 ,...ln , i1 ,...i4 are radial distortion parameters;

Δt表示鱼眼镜头的切向畸变,m1,...mn,j1,...j4为切向畸变参数;Δt represents the tangential distortion of the fisheye lens, m1 ,...mn , j1 ,...j4 are tangential distortion parameters;

xd为像素点的位置向量,即(xd,yd),ur为径向单位向量,
(u0,v0)为图像的主点坐标,(mu,mv)分别为CCD水平与垂直方向上单位距离上的像素数,(k1,k2,k3,k4,k5,l1,l2,l3,i1,i2,i3,i4,m1,m2,m3,j1,j2,j3,j4,mu,mv,u0,v0)为待标定的鱼眼镜头的参数。(u0 , v0 ) are the principal point coordinates of the image, (mu , mv ) are the number of pixels per unit distance in the horizontal and vertical directions of the CCD, respectively, (k1 , k2 , k3 , k4 , k5 , l1 , l2 , l3 , i 1 , i2 , i3 ,i4 , m1 , m2 , m3 , j 1 , j2 , j3, j4 ,mu , mv , u0 , v0 ) are the parameters of the fisheye lens to be calibrated.
根据本发明的基于鱼眼镜头的车载移动摄影测量系统的一实施例,初始化内参模块的处理如下:According to an embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention, the process of initializing the internal reference module is as follows:
读取镜头参数,镜头参数包括焦距f和最大视角θmax;Read lens parameters, lens parameters include focal length f and maximum viewing angle θmax ;
令k1=f,rmax=fθmax;Let k1 = f, rmax = fθmax ;
检测鱼眼图像边界,对边界点进行椭圆拟合:


其它的参数设置为0。Other parameters are set to 0.
根据本发明的基于鱼眼镜头的车载移动摄影测量系统的一实施例,单应矩阵计算模块包括:According to an embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention, the homography matrix calculation module includes:
棋盘格图像读取单元,读取标定板上的棋盘格图像;The checkerboard image reading unit reads the checkerboard image on the calibration board;
交叉点选取单元,耦接棋盘格图像读取单元,在每张棋盘格图像上依次选取棋盘格顶点处的4个交叉点;The intersection selection unit is coupled to the checkerboard image reading unit, and sequentially selects 4 intersection points at the vertices of the checkerboard on each checkerboard image;
反投影单元,耦接交叉点选取单元,利用初始化内参,将交叉点

单应矩阵估计单元,耦接反投影单元,估计单应矩阵Hj,将单位向量表示为

单应矩阵优化单元,耦接单应矩阵估计单元,通过LM迭代最小化误差函数


交叉点映射单元,耦接单应矩阵优化单元,将标定板上的所有交叉点通过优化后的单应矩阵Hj映射到单位球上得到对应点:
交叉点图像坐标获取单元,耦接交叉点映射单元,将单位向量变换到图像上:


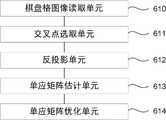
根据本发明的基于鱼眼镜头的车载移动摄影测量系统的一实施例,单应矩阵计算模块包括:According to an embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention, the homography matrix calculation module includes:
棋盘格图像读取单元,读取标定板上的棋盘格图像;The checkerboard image reading unit reads the checkerboard image on the calibration board;
交叉点选取单元,耦接棋盘格图像读取单元,在每张棋盘格图像上依次选取所有的棋盘格交叉点;The intersection selection unit is coupled to the checkerboard image reading unit, and sequentially selects all checkerboard intersections on each checkerboard image;
反投影单元,耦接交叉点选取单元,利用初始化内参,将交叉点

单应矩阵估计单元,耦接反投影单元,估计单应矩阵Hj,将单位向量

单应矩阵优化单元,耦接单应矩阵估计单元,通过LM迭代最小化误差函数



根据本发明的基于鱼眼镜头的车载移动摄影测量系统的一实施例,初始化外参模块的处理如下:According to an embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention, the process of initializing the external parameter module is as follows:
外参
其中,

根据本发明的基于鱼眼镜头的车载移动摄影测量系统的一实施例,迭代优化模块的处理如下:According to an embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention, the processing of the iterative optimization module is as follows:
LM迭代最小化重投影误差


本发明对比现有技术有如下的有益效果:本发明的主要特点是将鱼眼相机立体视觉模块应用于车载测量系统,利用鱼眼镜头视野范围大的特点,实现大范围的测量。通过车辆位姿获取单元,可以得到所采集图像的位置及距离信息,包括经纬度、姿态、以及车辆运行的距离等,加上全景采集模块,同时获取具有丰富色彩信息的全景影像数据。从而解决了现有测量系统测量范围小,图像色彩少或信息不完全的问题,可让用户快速获取所需要的信息,尤其针对城市环境,大大提升了测量的效率和精准度,为数据统计和更新,特别是城市建设、规划、勘测提供了更加简易和全面的方法。Compared with the prior art, the present invention has the following beneficial effects: the main feature of the present invention is that the fisheye camera stereo vision module is applied to the vehicle-mounted measurement system, and the large-scale measurement is realized by utilizing the characteristic of the large field of view of the fisheye lens. Through the vehicle pose acquisition unit, the position and distance information of the collected images can be obtained, including latitude and longitude, attitude, and the distance of the vehicle, etc., plus the panoramic acquisition module, and panoramic image data with rich color information can be obtained at the same time. In this way, the problems of small measurement range, few image colors or incomplete information of the existing measurement system are solved, allowing users to quickly obtain the required information, especially for urban environments, greatly improving the efficiency and accuracy of measurement, providing data statistics and Updates, especially for urban construction, planning, and surveying, provide a simpler and more comprehensive approach.
附图说明Description of drawings
图1示例性的示出了本发明的基于鱼眼镜头的车载移动摄影测量系统的第一实施例的原理图。Fig. 1 exemplarily shows the schematic diagram of the first embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention.
图2示例性的示出了本发明的基于鱼眼镜头的车载移动摄影测量系统的第二实施例的原理图。Fig. 2 exemplarily shows the schematic diagram of the second embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention.
图3示例性的示出了本发明的基于鱼眼镜头的车载移动摄影测量系统的第三实施例的原理图。Fig. 3 exemplarily shows the schematic diagram of the third embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention.
图4示例性的示出了本发明的标定装置的实施例的原理图。Fig. 4 exemplarily shows a principle diagram of an embodiment of the calibration device of the present invention.
图5示例性的示出了本发明的标定装置中的单应矩阵计算模块的一种示例的细化原理图。Fig. 5 exemplarily shows a refined schematic diagram of an example of the homography matrix calculation module in the calibration device of the present invention.
图6示例性的示出了本发明的标定装置中的单应矩阵计算模块的另一种示例的细化原理图。Fig. 6 exemplarily shows a refined principle diagram of another example of the homography matrix calculation module in the calibration device of the present invention.
图7示例性的示出了本发明的半单位球面模型的示意图。Fig. 7 exemplarily shows a schematic diagram of a semi-unit sphere model of the present invention.
具体实施方式Detailed ways
下面结合附图和实施例对本发明作进一步的描述。The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
在介绍本发明的各个实施例之前,还要对鱼眼图像(影像)作一个说明:鱼眼影像是指通过鱼眼镜头汇聚光线透射到感光成像元件上并存储获得的影像,由于是通过鱼眼镜头获取的,则称这类照片为鱼眼影像。Before introducing the various embodiments of the present invention, an explanation will be made to the fisheye image (image): the fisheye image refers to the image obtained by converging light through the fisheye lens and transmitting it to the photosensitive imaging element and storing it. Such photos are called fisheye images.
介绍本发明的各个实施例之前,还要对鱼眼相机做一个说明:将相机与鱼眼镜头连接,所生成的影像能获得超广角的视野范围,则称这类相机为鱼眼相机。Before introducing the various embodiments of the present invention, an explanation must be made about the fisheye camera: when the camera is connected with a fisheye lens, the generated image can obtain a super wide-angle field of view, and this type of camera is called a fisheye camera.
在介绍本发明的各个实施例之前,首先对全景或者全景图像(影像)作一个说明:若将图像放在一个球空间、或立方体空间、或柱形空间、或锥形空间、或椭球空间中,通过上述空间中固定一点作为观察点,通过该观察点采用单点透视该图像所获得的影像的过程即为全景播放,则该图像被对应的称为球形全景、或立方体全景、或柱形全景、或锥形全景、或椭球全景,并且统称该图像为全景或全景图像(影像)。Before introducing each embodiment of the present invention, at first make an explanation to panorama or panorama image (image): if image is placed on a spherical space, or cube space, or cylindrical space, or cone space, or ellipsoid space In the above-mentioned space, by fixing a point in the above space as the observation point, the process of using the single-point perspective of the image to obtain the image through the observation point is the panorama playback, and the image is called a spherical panorama, or a cube panorama, or a cylindrical panorama. Shaped panorama, or conical panorama, or ellipsoidal panorama, and the image is collectively referred to as panorama or panorama image (image).
基于鱼眼镜头的车载移动摄影测量系统的第一实施例The first embodiment of the vehicle-mounted mobile photogrammetry system based on fisheye lens
图1示出了本发明的基于鱼眼镜头的车载移动摄影测量系统的第一实施例。请参见图1。本实施例的基于鱼眼镜头的车载移动摄影测量系统包括数据采集装置10a、数据存储装置20a、数据处理单元装置30a。Fig. 1 shows the first embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention. See Figure 1. The vehicle-mounted mobile photogrammetry system based on a fisheye lens in this embodiment includes a
这三个装置之间的连接关系是:数据采集装置10a的输出端连接数据存储装置20a,数据存储装置20a的输出端连接数据处理装置30a。The connection relationship between these three devices is: the output end of the
数据采集装置10a包括鱼眼相机立体视觉模块102a,由至少一个立体视觉对组成,即两台鱼眼相机。鱼眼立体相机立体视觉模块102a包括鱼眼镜头1022a,CCD相机1024a和标定装置1026a。鱼眼镜头1022a连接到CCD相机1024a上,组成可以生成超广角视野的鱼眼影像。标定装置1026a用于获取鱼眼相机的成像参数以及鱼眼相机立体视觉对参数。The
标定装置1026a是采用基于多项式拟合的技术来建立数学模型并描述鱼眼镜头的成像过程。The
标定装置1026a的细化原理如图4所示,鱼眼成像关系建立模块40、初始化内参模块50、单应矩阵计算模块60、初始化外参模块70、迭代优化模块80。The refinement principle of the
这些模块之间的连接关系是:鱼眼成像关系建立模块40的输出端耦接初始化内参模块50,初始化内参模块50的输出端连接单应矩阵计算模块60,单应矩阵计算模块60的输出端耦接初始化外参模块70,初始化外参模块70的输出端耦接迭代优化模块80。The connection relationship between these modules is: the output end of the fisheye imaging
以下是标定装置1026a的其中一种示例的实施情况。The following is one example implementation of the
鱼眼成像关系建立模块40用于建立半单位球面模型,并在单位球面模型上建立鱼眼成像关系。The fisheye imaging
半单位球面模型的示意如图7所示,记空间中一点x,其在鱼眼图像上的成像点为(u,v),其指向单位球球心的入射光线的入射角度为


r(θ)=k1θ+k2θ2+k3θ3+k4θ4+k5θ5+...knθn (1)r(θ)=k1 θ+k2 θ2 +k3 θ3 +k4 θ4 +k5 θ5 +...kn θn (1)
r表示图像上的某个像素点到图像主点的距离,k1,...kn是鱼眼镜头的成像参数。r represents the distance from a certain pixel on the image to the main point of the image, k1 ,...kn are the imaging parameters of the fisheye lens.

Δr表示鱼眼镜头的径向畸变,l1,...ln,i1,...i4为径向畸变参数。Δr represents the radial distortion of the fisheye lens, and l1 ,...ln , i1 ,...i4 are radial distortion parameters.
Δt表示鱼眼镜头的切向畸变,m1,...mn,j1,...j4为切向畸变参数。Δt represents the tangential distortion of the fisheye lens, and m1 ,...mn , j1 ,...j4 are tangential distortion parameters.

xd为像素点的位置向量,即(xd,yd),ur为径向单位向量,
(u0,v0)为图像的主点坐标,(mu,mv)分别为CCD水平与垂直方向上单位距离上的像素数。(u0 , v0 ) are the principal point coordinates of the image, (mu , mv ) are the number of pixels per unit distance in the horizontal and vertical directions of the CCD, respectively.
其中已知信息为空间点x的入射角度
初始化内参模块50用于初始化内参。The initialization
初始化内参的具体处理如下。读取厂商提供的镜头参数:焦距f以及最大视角θmax令k1=f,rmax=fθmax。检测鱼眼图像边界,对边界点进行椭圆拟合:The specific process of initializing internal parameters is as follows. Read the lens parameters provided by the manufacturer: the focal length f and the maximum viewing angle θmax set k1 =f, rmax =fθmax . Detect the boundary of the fisheye image and perform ellipse fitting on the boundary points:
然后根据椭圆拟合求得u0,v0,a,b,则
内参是指鱼眼相机自身的参数,与外部环境无关,本实施例中所指的内参为:(k1,k2,k3,k4,k5,l1,l2,l3,i1,i2,i3,i4,m1,m2,m3,j1,j2,j3,j4,mu,mv,u0,v0)需要指出的是,公式(1)、(2)、(3)中的多项式的阶次可以到无穷次,实验中发现,公式(1)中多项式阶次取到5次,公式(2)、公式(3)中多项式阶次取到3次已经能够精确建模鱼眼镜头成像过程。The internal reference refers to the parameters of the fisheye camera itself, which has nothing to do with the external environment. The internal reference referred to in this embodiment is:( k1 , k2 , k3 , k 4 , k5 , l1 , l2 , l3 , i1 , i2 , i3 , i4 , m 1 , m2 , m3 , j1 , j2 , j3 , j4 , mu , mv ,u 0, v0 ) It should be noted that, The order of polynomials in formulas (1), (2), and (3) can reach infinite times. It is found in experiments that the order of polynomials in formula (1) is taken to 5 times, and the order of polynomials in formulas (2) and (3) Taking the polynomial order to 3 times has been able to accurately model the imaging process of the fisheye lens.
单应矩阵计算模块60用于计算单应矩阵。The homography
计算单应矩阵的原理如图5所示,包括棋盘格图像读取单元600、交叉点选取单元601、反投影单元602、单应矩阵估计单元603、单应矩阵优化单元604、交叉点映射单元605以及交叉点图像坐标获取单元606。The principle of calculating the homography matrix is shown in Figure 5, including a checkerboard
这些单元之间的连接关系是:棋盘格图像读取单元600的输出端耦接交叉点选取单元601,交叉点选取单元601的输出端耦接反投影单元602,反投影单元602的输出端耦接单应矩阵估计单元603,单应矩阵估计单元603的输出端耦接单应矩阵优化单元604,单应矩阵优化单元604的输出端耦接交叉点映射单元605,交叉点映射单元605的输出端耦接交叉点图像坐标获取单元606。The connection relationship between these units is: the output end of the checkerboard
棋盘格图像读取单元600读取棋盘格图像。The checkerboard
交叉点选取单元601在每张棋盘格图像上依次选取棋盘格顶点处的4个交叉点。The intersection
反投影单元602利用初始化内参,将交叉点


其中j为第j幅图像,i为第i个棋盘格交叉点。where j is the j-th image, and i is the i-th checkerboard intersection.
单应矩阵估计单元603估计单应矩阵。单位向量
单应矩阵优化单元604通过LM迭代最小化误差函数以优化单应矩阵Hj,其中


交叉点映射单元605将标定板上的所有交叉点通过优化后的单应矩阵Hj映射到单位球上得到对应点:
交叉点图像坐标获取单元606将单位向量变换到图像上:在投影点的邻域寻找交叉点的图像坐标
重复反投影单元602、单应矩阵估计单元603以及单应矩阵优化单元604的运作就能得到基于所有交叉点估计的更加准确的单应矩阵Hj。By repeating the operations of the back-
初始化外参模块70初始化外参。The initialization
外参可由单应矩阵Hj初始化如下:External reference It can be initialized by the homography matrix Hj as follows:
其中,

外参是指鱼眼相机与外部环境之间的参数,本实施例中是指鱼眼相机与标定板之间的参数Rj和Tj。The external parameters refer to the parameters between the fisheye camera and the external environment, and in this embodiment refer to the parameters Rj and Tj between the fisheye camera and the calibration board.
迭代优化模块80用于LM迭代最小化重投影误差


以下是标定装置1026a的其中另一种示例的实施情况。The following is another exemplary implementation of the
这一种示例的标定装置的鱼眼成像关系建立模块40用于建立半单位球面模型,并在单位球面模型上建立鱼眼成像关系。The fisheye imaging
半单位球面模型的示意如图7所示,记空间中一点x,其在鱼眼图像上的成像点为(u,v),其指向单位球球心的入射光线的入射角度为


r(θ)=k1θ+k2θ2+k3θ3+k4θ4+k5θ5+...knθn (1)r(θ)=k1 θ+k2 θ2 +k3 θ3 +k4 θ4 +k5 θ5 +...kn θn (1)
r表示图像上的某个像素点到图像主点的距离,k1,...kn是鱼眼镜头的成像参数。r represents the distance from a certain pixel on the image to the main point of the image, k1 ,...kn are the imaging parameters of the fisheye lens.

Δr表示鱼眼镜头的径向畸变,l1,...ln,i1,...i4为径向畸变参数。Δr represents the radial distortion of the fisheye lens, and l1 ,...ln , i1 ,...i4 are radial distortion parameters.

Δt表示鱼眼镜头的切向畸变,m1,...mn,j1,...j4为切向畸变参数。Δt represents the tangential distortion of the fisheye lens, and m1 ,...mn , j1 ,...j4 are tangential distortion parameters.

xd为像素点的位置向量,即(xd,yd),ur为径向单位向量,为切向单位向量。xd is the position vector of the pixel point, namely (xd , yd ), ur is the radial unit vector, is a tangential unit vector.
(u0,v0)为图像的主点坐标,(mu,mv)分别为CCD水平与垂直方向上单位距离上的像素数。(u0 , v0 ) are the principal point coordinates of the image, (mu , mv ) are the number of pixels per unit distance in the horizontal and vertical directions of the CCD, respectively.
其中已知信息为空间点x的入射角度
初始化内参模块50用于初始化内参。The initialization
初始化内参的具体处理如下。读取厂商提供的镜头参数:焦距f以及最大视角θmax令k1=f,rmax=fθmax。检测鱼眼图像边界,对边界点进行椭圆拟合:The specific process of initializing internal parameters is as follows. Read the lens parameters provided by the manufacturer: the focal length f and the maximum viewing angle θmax set k1 =f, rmax =fθmax . Detect the boundary of the fisheye image and perform ellipse fitting on the boundary points:
然后根据椭圆拟合求得u0,v0,a,b,则

内参是指鱼眼相机自身的参数,与外部环境无关,本实施例中所指的内参为:(k1,k2,k3,k4,k5,l1,l2,l3,i1,i2,i3,i4,m1,m2,m3,j1,j2,j3,j4,mu,mv,u0,v0)需要指出的是,公式(1)、(2)、(3)中的多项式的阶次可以到无穷次,实验中发现,公式(1)中多项式阶次取到5次,公式(2)、公式(3)中多项式阶次取到3次已经能够精确建模鱼眼镜头成像过程。The internal reference refers to the parameters of the fisheye camera itself, which has nothing to do with the external environment. The internal reference referred to in this embodiment is:( k1 , k2 , k3 , k 4 , k5 , l1 , l2 , l3 , i1 , i2 , i3 , i4 , m 1 , m2 , m3 , j1 , j2 , j3 , j4 , mu , mv ,u 0, v0 ) It should be noted that, The order of polynomials in formulas (1), (2), and (3) can reach infinite times. It is found in experiments that the order of polynomials in formula (1) is taken to 5 times, and the order of polynomials in formulas (2) and (3) Taking the polynomial order to 3 times has been able to accurately model the imaging process of the fisheye lens.
单应矩阵计算模块60用于计算单应矩阵。The homography
本实施例的计算单应矩阵的原理如图6所示,包括棋盘格图像读取单元610、交叉点选取单元611、反投影单元612、单应矩阵估计单元613、单应矩阵优化单元614。The principle of calculating the homography matrix in this embodiment is shown in FIG. 6 , including a checkerboard
这些单元之间的连接关系是:棋盘格图像读取单元610的输出端耦接交叉点选取单元611,交叉点选取单元611的输出端耦接反投影单元612,反投影单元612的输出端耦接单应矩阵估计单元613,单应矩阵估计单元613的输出端耦接单应矩阵优化单元614。The connection relationship between these units is: the output end of the checkerboard
棋盘格图像读取单元610读取棋盘格图像。The checkerboard
交叉点选取单元611在每张棋盘格图像上依次选取所有的棋盘格交叉点。The intersection
反投影单元612利用初始化内参,将交叉点


其中j为第j幅图像,i为第i个棋盘格交叉点。where j is the j-th image, and i is the i-th checkerboard intersection.
单应矩阵估计单元613估计单应矩阵。单位向量

单应矩阵优化单元614通过LM迭代最小化误差函数以优化单应矩阵Hj,其中


初始化外参模块70初始化外参。The initialization
外参
其中,Rj为旋转参数,Tj为位移参数,
外参是指鱼眼相机与外部环境之间的参数,本实施例中是指鱼眼相机与标定板之间的参数Rj和Tj。The external parameters refer to the parameters between the fisheye camera and the external environment, and in this embodiment refer to the parameters Rj and Tj between the fisheye camera and the calibration board.
迭代优化模块80用于LM迭代最小化重投影误差得到优化后的内参与外参。其中

数据采集装置10a中的鱼眼立体视觉模块102a采集连续的鱼眼图像,并将这些影像数据存储到数据存储装置20a上,利用鱼眼立体视觉对的参数,数据处理装置30a对所采集的数据进行处理,实现对所采集的鱼眼影像的测量,比如道路宽度、转弯半径,建筑的宽、高,广告牌的面积等。The fish-eye stereo vision module 102a in the
值得注意的是,其中的CCD相机1024a也可以是其他形式的例如CMOS相机。It should be noted that the
基于鱼眼镜头的车载移动摄影测量系统的第二实施例The second embodiment of the vehicle-mounted mobile photogrammetry system based on fisheye lens
图2示出了本发明的基于鱼眼镜头的车载移动摄影测量系统的第二实施例。请参见图2。本实施例的基于鱼眼镜头的车载移动摄影测量系统包括数据采集装置10b,数据存储装置20b,数据处理装置30b。Fig. 2 shows the second embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention. See Figure 2. The vehicle-mounted mobile photogrammetry system based on a fisheye lens in this embodiment includes a
这三个装置之间的连接关系是:数据采集装置10b的输出端连接数据存储装置20b,数据存储装置20b的输出端连接数据处理装置30b。The connection relationship between these three devices is: the output end of the
数据采集装置10b包括鱼眼相机立体视觉模块102b和车辆位姿获取模块104b。鱼眼相机立体视觉模块102b,由至少一个立体视觉对组成,即两台鱼眼相机。鱼眼立体相机立体视觉模块102b包括鱼眼镜头1022b,CCD相机1024b和标定装置1026b。鱼眼镜头1022b连接到CCD相机1024b上,组成可以生成超广角视野的鱼眼影像。标定装置1026b用于获取鱼眼相机的成像参数以及鱼眼相机立体视觉对参数。标定装置1026b的具体实施方式(有两种)均在第一实施例中详细描述,在此不再赘述。The
车辆位姿获取模块104b用于获取车辆行驶过程中的经纬度、姿态信息以及车辆行驶的准确距离。车辆位姿获取模块104b可以包括卫星定位系统,如GPS天线、GPS接收器、GPS基站,车辆姿态获取装置,如陀螺仪、加速度计等,车辆运行距离获取装置,如汽车总线或车轮编码器等。The vehicle pose acquisition module 104b is used to acquire the latitude and longitude, attitude information and the accurate distance traveled by the vehicle during the driving process. The vehicle pose acquisition module 104b may include a satellite positioning system, such as a GPS antenna, a GPS receiver, a GPS base station, a vehicle attitude acquisition device, such as a gyroscope, an accelerometer, etc., and a vehicle running distance acquisition device, such as an automobile bus or a wheel encoder, etc. .
数据采集装置10b中的鱼眼立体视觉模块102b采集连续的鱼眼图像,车辆位姿获取模块104b获取车辆行驶过程中的经纬度、姿态及车辆运行的距离信息,这些影像数据和位置、姿态、距离信息存储到数据存储装置20b上。利用鱼眼立体视觉对的参数,数据处理装置30b对所采集的数据进行处理,实现对所采集的鱼眼影像的测量,比如道路宽度,建筑的宽、高等。结合车辆位姿获取模块104b所采集到的信息,数据处理装置30b可以计算出鱼眼影像中物体的精确大地坐标和方向,即影像中感兴趣物体的绝对位置信息,从而对感兴趣物体进行标注,以实现城市管理、普查和规划的目的。The fish-eye stereo vision module 102b in the
基于鱼眼镜头的车载移动摄影测量系统的第三实施例The third embodiment of the vehicle-mounted mobile photogrammetry system based on fisheye lens
图3示出了本发明的基于鱼眼镜头的车载移动摄影测量系统的第三实施例。请参见图3。本实施例的基于鱼眼镜头的车载移动摄影测量系统包括数据采集装置10c、数据存储装置20c、数据处理装置30c。Fig. 3 shows the third embodiment of the vehicle-mounted mobile photogrammetry system based on the fisheye lens of the present invention. See Figure 3. The vehicle-mounted mobile photogrammetry system based on a fisheye lens in this embodiment includes a
这三个装置之间的连接关系是:数据采集装置10c的输出端连接数据存储装置20c,数据存储装置20c的输出端连接数据处理装置30c。The connection relationship between these three devices is: the output end of the
数据采集装置10c包括鱼眼相机立体视觉模块102c、车辆位姿获取模块104c和全景采集模块106c。The
鱼眼相机立体视觉模块102c由至少一个立体视觉对组成,即两台鱼眼相机。鱼眼立体相机立体视觉模块102c包括鱼眼镜头1022c,CCD相机1024c和标定装置1026c。鱼眼镜头1022c连接到CCD相机1024c上,组成可以生成超广角视野的鱼眼影像。标定装置1026c用于获取鱼眼相机的成像参数以及鱼眼相机立体视觉对参数。标定装置1026c的具体实施方式(有两种)均在第一实施例中详细描述,在此不再赘述。The fisheye camera
车辆位姿获取模块104c用于获取车辆行驶过程中的经纬度、姿态信息,以及车辆行驶的准确距离。车辆位姿获取模块104c可以包括卫星定位系统,如GPS天线、GPS接收器、GPS基站,车辆姿态获取装置,如陀螺仪、加速度计等,车辆运行距离获取装置,如汽车总线或车轮编码器等。The vehicle pose
全景采集模块106c用于采集高质量连续的全景影像数据。The
数据采集装置10c中的鱼眼立体视觉模块102c采集连续的鱼眼图像,车辆位姿获取模块104c获取车辆行驶过程中的经纬度、姿态及车辆运行的距离信息,全景采集模块106c采集连续的道路全景影像,这些影像数据和位置、姿态、距离信息存储到数据存储装置20c上。利用鱼眼立体视觉对的参数,数据处理装置30c对所采集的数据进行处理,实现对所采集的鱼眼影像的测量,比如道路宽度,建筑的宽、高等。结合车辆位姿获取模块104c所采集到的信息,数据处理装置30c可以计算出鱼眼影像的精确大地坐标和方向,即所测量物体的绝对位置信息,同时可以得到具有GIS信息的全景影像数据。The fisheye
上述实施例是提供给本领域普通技术人员来实现和使用本发明的,本领域普通技术人员可在不脱离本发明的发明思想的情况下,对上述实施例做出种种修改或变化,因而本发明的发明范围并不被上述实施例所限,而应该是符合权利要求书所提到的创新性特征的最大范围。The above-mentioned embodiments are provided for those of ordinary skill in the art to implement and use the present invention. Those of ordinary skill in the art can make various modifications or changes to the above-mentioned embodiments without departing from the inventive idea of the present invention. Therefore, the present invention The inventive scope of the invention is not limited by the above examples, but should be the widest scope consistent with the innovative features mentioned in the claims.
Claims (9)
Translated fromChinese






























Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201110023561.XACN102175221B (en) | 2011-01-20 | 2011-01-20 | Vehicle-mounted mobile photographic surveying system based on fisheye lens |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201110023561.XACN102175221B (en) | 2011-01-20 | 2011-01-20 | Vehicle-mounted mobile photographic surveying system based on fisheye lens |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102175221A CN102175221A (en) | 2011-09-07 |
| CN102175221Btrue CN102175221B (en) | 2014-04-09 |
Family
ID=44518432
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201110023561.XAActiveCN102175221B (en) | 2011-01-20 | 2011-01-20 | Vehicle-mounted mobile photographic surveying system based on fisheye lens |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN102175221B (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109839381A (en)* | 2017-11-28 | 2019-06-04 | 宝成工业股份有限公司 | The vision inspection apparatus of shoes part |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102519435B (en)* | 2011-12-21 | 2013-12-25 | 上海杰图软件技术有限公司 | Panoramic image acquisition and measurement system and panoramic image spatial measurement method |
| CN103438868B (en)* | 2012-01-09 | 2015-09-09 | 刘进 | Based on the object height measuring method of spherical panorama camera |
| WO2014091877A1 (en)* | 2012-12-12 | 2014-06-19 | 日産自動車株式会社 | Moving object location/attitude angle estimation device and moving object location/attitude angle estimation method |
| CN103268592A (en)* | 2013-04-24 | 2013-08-28 | 南京邮电大学 | A Fisheye Image Correction Method |
| CN104282010A (en)* | 2013-07-06 | 2015-01-14 | 南京车联网研究院有限公司 | Vehicle multi-fisheye-camera 360-degree overhead-view image splicing curve calibration method |
| CN106251342B (en)* | 2016-07-26 | 2019-11-26 | 杭州好好开车科技有限公司 | Camera calibration method based on sensing technology |
| CN106204625A (en)* | 2016-07-27 | 2016-12-07 | 大连理工大学 | A kind of variable focal length flexibility pose vision measuring method |
| CN106412582B (en)* | 2016-10-21 | 2019-01-29 | 北京大学深圳研究生院 | The description method of panoramic video area-of-interest and coding method |
| CN106570938A (en)* | 2016-10-21 | 2017-04-19 | 哈尔滨工业大学深圳研究生院 | OPENGL based panoramic monitoring method and system |
| WO2018076154A1 (en)* | 2016-10-25 | 2018-05-03 | 成都通甲优博科技有限责任公司 | Spatial positioning calibration of fisheye camera-based panoramic video generating method |
| CN106355550B (en)* | 2016-10-31 | 2024-04-09 | 河北鼎联科技有限公司 | Image stitching system and image stitching method |
| CN106572307A (en)* | 2016-11-01 | 2017-04-19 | 深圳岚锋创视网络科技有限公司 | Panoramic image generation method, panoramic image generation system and photographing device |
| US9807359B1 (en)* | 2016-11-11 | 2017-10-31 | Christie Digital Systems Usa, Inc. | System and method for advanced lens geometry fitting for imaging devices |
| CN106908038B (en)* | 2017-01-04 | 2019-01-25 | 成都通甲优博科技有限责任公司 | A kind of monitoring device and monitoring system based on fish eye lens video camera |
| CN107122770B (en)* | 2017-06-13 | 2023-06-27 | 驭势(上海)汽车科技有限公司 | Multi-camera system, intelligent driving system, automobile, method and storage medium |
| CN111813361A (en)* | 2020-07-06 | 2020-10-23 | 广东智芯光电科技有限公司 | Stereo image presenting method and system |
| CN112465912B (en)* | 2020-11-18 | 2024-03-29 | 新拓三维技术(深圳)有限公司 | Stereo camera calibration method and device |
| WO2023025032A1 (en)* | 2021-08-26 | 2023-03-02 | 追觅创新科技(苏州)有限公司 | Data processing method and apparatus, storage medium, electronic apparatus and self-moving device |
| CN117541662B (en)* | 2024-01-10 | 2024-04-09 | 中国科学院长春光学精密机械与物理研究所 | Method for calibrating camera internal parameters and deriving camera coordinate system simultaneously |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1994013100A2 (en)* | 1992-11-24 | 1994-06-09 | Geeris Holding Nederland B.V. | A method and device for producing panoramic images, and a method and device for consulting panoramic images |
| JP2002013295A (en)* | 2000-06-30 | 2002-01-18 | Nikken Atorasu Kobe:Kk | Method for creating investigation data on deformed part in building |
| CN101101211A (en)* | 2006-07-03 | 2008-01-09 | 宾得工业仪器株式会社 | Measuring device |
| CN101452292A (en)* | 2008-12-29 | 2009-06-10 | 天津理工大学 | Fish glasses head omnidirectional vision aiming method based on sequence dual-color dot matrix type navigation mark |
| CN101561270A (en)* | 2009-05-27 | 2009-10-21 | 天津理工大学 | Embedded omnidirectional ball vision object detection and mobile monitoring system and embedded omnidirectional ball vision object detection and mobile monitoring method |
- 2011
- 2011-01-20CNCN201110023561.XApatent/CN102175221B/enactiveActive
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1994013100A2 (en)* | 1992-11-24 | 1994-06-09 | Geeris Holding Nederland B.V. | A method and device for producing panoramic images, and a method and device for consulting panoramic images |
| JP2002013295A (en)* | 2000-06-30 | 2002-01-18 | Nikken Atorasu Kobe:Kk | Method for creating investigation data on deformed part in building |
| CN101101211A (en)* | 2006-07-03 | 2008-01-09 | 宾得工业仪器株式会社 | Measuring device |
| CN101452292A (en)* | 2008-12-29 | 2009-06-10 | 天津理工大学 | Fish glasses head omnidirectional vision aiming method based on sequence dual-color dot matrix type navigation mark |
| CN101561270A (en)* | 2009-05-27 | 2009-10-21 | 天津理工大学 | Embedded omnidirectional ball vision object detection and mobile monitoring system and embedded omnidirectional ball vision object detection and mobile monitoring method |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109839381A (en)* | 2017-11-28 | 2019-06-04 | 宝成工业股份有限公司 | The vision inspection apparatus of shoes part |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102175221A (en) | 2011-09-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102175221B (en) | Vehicle-mounted mobile photographic surveying system based on fisheye lens | |
| CN109115186B (en) | A 360° measurable panoramic image generation method for vehicle-mounted mobile measurement system | |
| CN101814181B (en) | Unfolding method for restoration of fisheye image | |
| WO2020062434A1 (en) | Static calibration method for external parameters of camera | |
| US8610708B2 (en) | Method and apparatus for three-dimensional image reconstruction | |
| CN102034238B (en) | Multi-camera system calibrating method based on optical imaging probe and visual graph structure | |
| CN102096923B (en) | Fisheye calibration method and device | |
| CN112894832A (en) | Three-dimensional modeling method, three-dimensional modeling device, electronic equipment and storage medium | |
| CN110231025B (en) | A dynamic orientation method and system based on strapdown polarized light compass | |
| CN110296691A (en) | Merge the binocular stereo vision measurement method and system of IMU calibration | |
| CN106204656A (en) | Target based on video and three-dimensional spatial information location and tracking system and method | |
| CN102679959B (en) | Omnidirectional 3D modeling system based on active panoramic vision sensor | |
| CN103900539B (en) | A kind of aerial cube panoramic imagery object localization method | |
| CN116129067A (en) | Urban live-action three-dimensional modeling method based on multi-source geographic information coupling | |
| JP2023505891A (en) | Methods for measuring environmental topography | |
| CN102693543B (en) | Method for automatically calibrating Pan-Tilt-Zoom in outdoor environments | |
| JP4418857B1 (en) | Image acquisition system for generating 3D video of routes | |
| CN105953777B (en) | A kind of large scale based on depth map tilts image plotting method | |
| CN109883433A (en) | Vehicle localization method in structured environment based on 360-degree panoramic view | |
| CN102589529B (en) | Scanning close-range photogrammetry method | |
| CN110986888A (en) | Aerial photography integrated method | |
| CN110827359A (en) | Camera and laser external reference calibration method and device based on checkerboard trihedron | |
| CN106023207A (en) | City component collecting method based on double panoramas of mobile measuring system | |
| CA3102860C (en) | Photography-based 3d modeling system and method, and automatic 3d modeling apparatus and method | |
| CN102095368B (en) | Method for quickly acquiring camera parameters in wide-range vision coordinate measurement |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| ASS | Succession or assignment of patent right | Owner name:BEIJING BAIDU NETWORK INFORMATION TECHNOLOGY CO., Free format text:FORMER OWNER: SHANGHAI JIETU SOFTWARE TECHN CO., LTD. Effective date:20131224 | |
| C41 | Transfer of patent application or patent right or utility model | ||
| COR | Change of bibliographic data | Free format text:CORRECT: ADDRESS; FROM: 201203 PUDONG NEW AREA, SHANGHAI TO: 100085 HAIDIAN, BEIJING | |
| TA01 | Transfer of patent application right | Effective date of registration:20131224 Address after:100085 Beijing, Haidian District, No. ten on the ground floor, No. 10 Baidu building, layer 2 Applicant after:BEIJING BAIDU NETCOM SCIENCE AND TECHNOLOGY Co.,Ltd. Address before:201203, room 53, building 1000, Lane 101, Zhang Heng Road, Shanghai, Pudong New Area Applicant before:Shanghai Jietu Software Techn Co., Ltd. | |
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| EE01 | Entry into force of recordation of patent licensing contract | Application publication date:20110907 Assignee:Shanghai Jietu Software Techn Co., Ltd. Assignor:BEIJING BAIDU NETCOM SCIENCE AND TECHNOLOGY Co.,Ltd. Contract record no.:2015110000043 Denomination of invention:Vehicle-mounted mobile photographic surveying system based on fisheye lens Granted publication date:20140409 License type:Common License Record date:20151022 | |
| LICC | Enforcement, change and cancellation of record of contracts on the licence for exploitation of a patent or utility model |