CN102069905A - tilt wing helicopter - Google Patents
tilt wing helicopterDownload PDFInfo
- Publication number
- CN102069905A CN102069905ACN2010105999822ACN201010599982ACN102069905ACN 102069905 ACN102069905 ACN 102069905ACN 2010105999822 ACN2010105999822 ACN 2010105999822ACN 201010599982 ACN201010599982 ACN 201010599982ACN 102069905 ACN102069905 ACN 102069905A
- Authority
- CN
- China
- Prior art keywords
- helicopter
- rotor
- swing
- center
- engine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000005540biological transmissionEffects0.000claimsabstractdescription6
- 230000007246mechanismEffects0.000claimsabstractdescription6
- 239000003638chemical reducing agentSubstances0.000claimsdescription16
- 230000005484gravityEffects0.000abstractdescription3
- 238000004519manufacturing processMethods0.000abstractdescription2
- 241000566150Pandion haliaetusSpecies0.000description7
- 238000000034methodMethods0.000description4
- 230000008901benefitEffects0.000description3
- 230000008859changeEffects0.000description3
- 230000008878couplingEffects0.000description2
- 238000010168coupling processMethods0.000description2
- 238000005859coupling reactionMethods0.000description2
- 230000006872improvementEffects0.000description2
- 230000008569processEffects0.000description2
- 206010044565TremorDiseases0.000description1
- 239000002131composite materialSubstances0.000description1
- 238000013329compoundingMethods0.000description1
- 230000007812deficiencyEffects0.000description1
- 230000009347mechanical transmissionEffects0.000description1
Images
Landscapes
- Toys (AREA)
Abstract
Translated fromChineseDescription
Translated fromChinese技术领域technical field
本发明涉及一种新型倾斜翼直升机,尤其是直升机螺旋桨部分的结构,属于直升机制造技术领域。The invention relates to a novel tilt-wing helicopter, in particular to the structure of the helicopter propeller part, and belongs to the technical field of helicopter manufacturing.
背景技术Background technique
直升机主要由机体和旋翼、发动机、传动机构以及机载飞行设备等组成。旋翼一般由涡轮轴发动机或活塞式发动机通过由传动轴及减速器等组成的机械传动系统来驱动。直升机发动机驱动旋翼提供升力,把直升机举托在空中,通过称为“倾斜盘”的机构可以改变直升飞机的旋翼的桨叶角,从而实现旋翼周期变距,以此改变旋翼旋转平面不同位置的升力来实现改变直升机的飞行姿态,再以升力方向变化改变飞行方向。Helicopter is mainly composed of body and rotor, engine, transmission mechanism and airborne flight equipment. The rotor is generally driven by a turboshaft engine or a piston engine through a mechanical transmission system composed of a transmission shaft and a reducer. The helicopter engine drives the rotor to provide lift and lift the helicopter in the air. The blade angle of the helicopter's rotor can be changed through a mechanism called "swash plate", thereby realizing the variable pitch of the rotor cycle, so as to change the different positions of the rotor rotation plane The lift force is used to change the flight attitude of the helicopter, and then the flight direction is changed by the change of the lift force direction.
为弥补传统直升机速度低的不足,人们通常采取如下办法:①采用复合结构[1],在直升机的尾部增加一个矢量推进装置以增加直升机平飞的的速度,飞行速度的提高是以较大幅度地增加直升机重量为前提的;②倾转旋翼机,这种结构比较成功的是美国的V-22“鱼鹰”,它在翼尖装配了可旋转90°的发动机短舱及旋翼系统,它在垂直起飞和水平飞行之间变换时,直升机的机翼不转动,但驱动旋翼的发动机要在垂直——水平之间位置摆动,由于驱动旋翼的发动机重量比较大,且发动机短舱及旋翼系远离重心,因此,在高速飞行时,就容易造成旋翼与机翼耦合的颤振问题,这同样限制了倾转旋翼机的飞行速度(参见参考文献[1-5])。In order to make up for the low speed of traditional helicopters, people usually adopt the following methods: ①Use a composite structure[1] , add a vector propulsion device at the tail of the helicopter to increase the speed of the helicopter in level flight, and the flight speed is increased by a large margin. The premise is to increase the weight of the helicopter as much as possible; ②The tilt rotor aircraft, the more successful of this structure is the V-22 "Osprey" of the United States, which is equipped with an engine nacelle and a rotor system that can rotate 90° at the wingtip. When changing between vertical take-off and horizontal flight, the wings of the helicopter do not rotate, but the engine driving the rotor must swing between vertical and horizontal positions, because the weight of the engine driving the rotor is relatively large, and the engine nacelle and the rotor system are far away from each other. Therefore, when flying at high speed, it is easy to cause the flutter problem of coupling between the rotor and the wing, which also limits the flight speed of the tiltrotor (see references[1-5] ).
发明内容Contents of the invention
本发明的目的就是针对现有的直升机存在的上述不足,提供一种实现旋翼的高速旋转和低速摆动的新型倾斜翼的直升机。Purpose of the present invention is exactly to the above-mentioned deficiency that existing helicopter exists, provides a kind of helicopter that realizes the high-speed rotation of rotor and the novel inclined-wing of low-speed swing.
本发明的目的是这样实现的,倾斜翼直升机,包括机体、左、右主发动机、左、右旋翼、左、右摆动电机和机载飞行设备,其特征在于设有由左、右中心轮,左、右行星轮,左、右系杆分别构成左、右旋翼的传动机构;左、右主发动机,左、右中心轮,左、右摆动电机,左、右系杆分别安装在机体的两侧,主发动机与中心轮驱动连接,行星轮与旋翼为一体式结构,中心轮与行星轮啮合,摆动电机与系杆连接,行星轮支撑在系杆上。The object of the present invention is achieved like this, tilt-wing helicopter, comprises body, left and right main engine, left and right rotor, left and right swing motor and airborne flight equipment, is characterized in that being provided with by left and right central wheel, The left and right planetary gears, the left and right tie rods constitute the transmission mechanisms of the left and right rotors respectively; the left and right main engines, the left and right center wheels, the left and right swing motors, and the left and right tie rods are respectively installed on the two sides of the body. On the side, the main engine is driven and connected to the center wheel, the planetary wheel and the rotor are integrated, the center wheel meshes with the planetary wheel, the swing motor is connected to the tie rod, and the planetary wheel is supported on the tie rod.
所述的主发动机与中心轮之间设有主减速器连接。A final reducer is connected between the main engine and the sun wheel.
所述的摆动电机与系杆之间设有摆动减速器连接。A swing reducer is connected between the swing motor and the tie rod.
本发明的特点为:①在起飞阶段,直升机旋翼的轴线是垂直于地面,螺旋桨提供向上的升力;②在前飞阶段,直升机旋翼的轴线向前倾斜,螺旋桨提供前飞的动力;③新型的倾斜翼结构可以保证旋翼的轴线在摆动过程中,驱动浆叶高速旋转的发动机壳体固定在飞机的机体上;④新型的倾斜翼结构可以保证驱动浆叶高速旋转的发动机靠近飞机轴线布置。The characteristics of the present invention are: 1. in the take-off stage, the axis of the helicopter rotor is perpendicular to the ground, and the propeller provides upward lift; 2. in the forward flight stage, the axis of the helicopter rotor is tilted forward, and the propeller provides the power of the forward flight; 3. the novel The inclined-wing structure can ensure that the engine housing that drives the blades to rotate at high speed is fixed on the aircraft body during the swing process of the axis of the rotor; ④ the new inclined-wing structure can ensure that the engine that drives the blades to rotate at high speed is arranged close to the axis of the aircraft.
特点①、②可以提高直升机的飞行速度,美国的V-22“鱼鹰”虽然具有上述特点①、②,但不具备上述特点③、④,具体的说,V-22“鱼鹰”旋翼的轴线摆动过程中,驱动浆叶高速旋转的发动机要绕飞机的机身摆动,摆动发动机不仅需要消耗能量,且不利于飞机刚度的提高;V-22驱动浆叶高速旋转的发动机要安装在飞机机翼两边的最远端,如同人水平伸直两臂举哑铃,在飞行中,容易引起飞机机翼的颤抖,影响了飞行速度的进一步提高。新型倾斜翼直升机由于具备了特点③、④,和美国的V-22“鱼鹰”相比,具有倾斜翼结构刚度高、重量轻的优点,更有利于实现直升机的高速运动。
本发明可以实现旋翼的高速旋转和低速摆动,其优点:(1)新型倾斜翼直升机在垂直起飞和水平飞行之间变换时,驱动旋翼高速旋转的发动机固定在直升机的机体上(而V-22“鱼鹰”驱动旋翼的发动机是绕直升机的机体做摆动);(2)驱动旋翼高速旋转的发动机靠近直升机的重心布置(而V-22“鱼鹰”驱动旋翼的发动机是远离直升机的重心)。本发明的优点(1)、(2)决定了机翼支撑刚度高于V-22“鱼鹰”,有助于克服V-22“鱼鹰”存在的机翼耦合的颤振问题,为进一步提高直升机的飞行速度提供了保证。The present invention can realize the high-speed rotation and low-speed swing of rotor, and its advantage: (1) when novel tilt-wing helicopter changes between vertical take-off and horizontal flight, the engine that drives rotor high-speed rotation is fixed on the body of helicopter (and V-22 (2) the engine driving the rotor high-speed rotation is arranged near the center of gravity of the helicopter (and the engine of the V-22 "Osprey" driving the rotor is away from the center of gravity of the helicopter). Advantages (1) and (2) of the present invention determine that the wing support stiffness is higher than that of V-22 "Osprey", which helps to overcome the flutter problem of the wing coupling that V-22 "Osprey" exists, in order to further improve the helicopter The flight speed is guaranteed.
附图说明Description of drawings
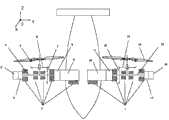
图1是本发明的结构示意图;Fig. 1 is a structural representation of the present invention;
图中:1机体、2左摆动电机、3左摆动减速器、4左系杆、5左旋翼、6左行星轮、7左中心轮、8左主减速器、9左主发动机、10右主发动机、11右主减速器、12右中心轮、13右行星轮、14右旋翼、15右系杆、16右摆动电机、17右摆动减速器。In the figure: 1 body, 2 left swing motor, 3 left swing reducer, 4 left tie rod, 5 left rotor, 6 left planetary wheel, 7 left center wheel, 8 left main reducer, 9 left main engine, 10 right main Engine, 11 right main reducer, 12 right center wheel, 13 right planetary gear, 14 right rotor, 15 right tie rod, 16 right swing motor, 17 right swing reducer.
具体实施方式Detailed ways
如图1所示,倾斜翼直升机由机体、左、右主发动机、左、右旋翼、左、右摆动电机和机载飞行设备及左、右旋翼的传动机构等构成。左主发动机9安装在直升机的机体1上,左主发动机9和左中心轮7相连接,左中心轮7安装在机体上1并和左行星轮6相啮合,左行星轮6和左旋翼5为同一个构件(将左行星轮6和左旋翼5加工成一体结构),左摆动电机2安装在机体1并和左系杆4连接,左系杆4安装在机体1上并支撑左行星轮6;右主发动机10安装在直升机的机体1上,右主发动机10和右中心轮12相连接,右中心轮12安装在机体上1并和右行星轮13相啮合,右行星轮13和右旋翼14为同一个构件(将右行星轮13和右旋翼14加工成一体结构),右系杆15安装在机体1上并支撑右行星轮13;左主发动机9通过左主减速器8和左中心轮7相连接,左摆动电机2通过左摆动减速器3和左系杆4连接;右主发动机10通过右主减速器11和右中心轮12相连接,右摆动电机16通过右摆动减速器17和右系杆15连接。运用减速器的目的是增加输出力矩。As shown in Figure 1, the tilt-wing helicopter consists of a body, left and right main engines, left and right rotors, left and right swing motors, airborne flight equipment, and transmission mechanisms for left and right rotors. The left
坐标建立:Coordinates build:
两旋翼的连线和直升机机身轴线为坐标原点o,直升机机身轴线为x轴,z轴垂直于地面,用右手法则确定y轴。The line connecting the two rotors and the axis of the helicopter fuselage is the coordinate origin o, the axis of the helicopter fuselage is the x-axis, the z-axis is perpendicular to the ground, and the y-axis is determined by the right-hand rule.
工作原理:working principle:
在直升机起飞阶段,左旋翼5和右旋翼14的轴线垂直于地面;左主发动机9通过左主减速器8驱动左中心轮7高速旋转,左中心轮7驱动左行星轮6高速旋转,左行星轮6带动左旋翼5高速旋转,从而产生向上的升力;右主发动机10通过右主减速器11驱动右中心轮12高速旋转,右中心轮12驱动右行星轮13高速旋转,右行星轮13带动右旋翼14高速旋转,同样产生向上的升力;为保证左旋翼5和右旋翼14产生的扭力相互抵消(扭力在xoy平面内不利于直升机飞行),左主发动机9和右主发动机10的转速相反,且左旋翼5和右旋翼14是一对正、反奖。在直升机平飞阶段,左摆动电机2驱动左系杆4摆动,左系杆4带动左行星轮6摆动,左行星轮6带动左旋翼5的轴线向前倾斜;同样,右摆动电机16驱动右系杆15摆动,右系杆15带动右行星轮13摆动,右行星轮13带动右旋翼14的轴线向前倾斜;前倾斜的左旋翼5和右旋翼14产生前飞的动力。During the take-off stage of the helicopter, the axes of the left rotor 5 and the
参考文献references
[1]知远.世界各国的杂交直升机:速度追求的复合.[1] Zhiyuan. Hybrid helicopters from all over the world: Compounding in the pursuit of speed.
http://mil.news.sohu.com/20081210/n260949419.shtml.2008年12月10日。http://mil.news.sohu.com/20081210/n260949419.shtml. December 10, 2008.
[2]Hyeonsoo Yeo,Wayne Johnson,Hyeonsoo Yeo,Wayne Johnso.Performance and Design Investigation of Heavy Lift Tilt-Rotor with Aerodynamic Interference Effects[J].Journal of aircraft,2009,46(4):1440-1449。[2] Hyeonsoo Yeo, Wayne Johnson, Hyeonsoo Yeo, Wayne Johnson. Performance and Design Investigation of Heavy Lift Tilt-Rotor with Aerodynamic Interference Effects [J]. Journal of aircraft, 2009, 46(4): 1440-1449.
[3]Martin D Maisel,Demo J.Giulianeti,Daniel C.Dugan.The History of the XV-15Tilt Rotor Research Aircraft:From Concept to Flight.NASA SP-2000-4517。[3] Martin D Maisel, Demo J.Giulianeti, Daniel C.Dugan. The History of the XV-15Tilt Rotor Research Aircraft: From Concept to Flight. NASA SP-2000-4517.
[4]岳海龙,夏品奇.倾转旋翼机前飞动力学稳定性分析[J].航空动力学报,2007,(11)。[4] Yue Hailong, Xia Pinqi. Stability analysis of tiltrotor forward flight dynamics [J]. Journal of Aerodynamics, 2007, (11).
[5]徐进,高正.适合机动飞行的旋翼气动模型研究[J].航空动力学报,2008,(01)。[5] Xu Jin, Gao Zheng. Research on rotor aerodynamic model suitable for maneuvering flight [J]. Journal of Aerodynamics, 2008, (01).
Claims (3)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201010599982CN102069905B (en) | 2010-12-16 | 2010-12-16 | Oblique wing helicopter |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201010599982CN102069905B (en) | 2010-12-16 | 2010-12-16 | Oblique wing helicopter |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102069905Atrue CN102069905A (en) | 2011-05-25 |
| CN102069905B CN102069905B (en) | 2013-01-02 |
Family
ID=44028708
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 201010599982Expired - Fee RelatedCN102069905B (en) | 2010-12-16 | 2010-12-16 | Oblique wing helicopter |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN102069905B (en) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102602536A (en)* | 2012-03-28 | 2012-07-25 | 郇心明 | Propeller movable airplane |
| CN102632994A (en)* | 2012-05-05 | 2012-08-15 | 扬州大学 | Tilt rotor aircraft |
| CN102632993A (en)* | 2012-05-05 | 2012-08-15 | 扬州大学 | Series-parallel tilting drive mechanism of tilt rotor aircraft |
| CN103432750A (en)* | 2013-07-01 | 2013-12-11 | 钱志湘 | Front-engine rear-drive model aircraft |
| CN106184739A (en)* | 2015-05-26 | 2016-12-07 | 空中客车防务和空间有限责任公司 | The flight equipment that can take off vertically |
| CN108298069A (en)* | 2018-02-21 | 2018-07-20 | 江富余 | Variable-lift center helicopter |
| CN108454847A (en)* | 2018-03-21 | 2018-08-28 | 华南农业大学 | A kind of rotor attitude regulating mechanism and the multi-rotor unmanned aerial vehicle including the device |
| CN114929573A (en)* | 2020-12-28 | 2022-08-19 | 深圳市大疆创新科技有限公司 | Fluid guiding device, aircraft, blade and control method |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5782433A (en)* | 1995-04-27 | 1998-07-21 | Advanced Technology Institute Of Commuter-Helicopter, Ltd. | Engine deceleration device and power transmission device for helicopters |
| CN1544289A (en)* | 2003-11-21 | 2004-11-10 | 骞 穆 | Oneman vertical takeoff and landing aerial craft with double leaning and rotating culvert fan |
| CN1772561A (en)* | 2004-11-08 | 2006-05-17 | 赵润生 | Complex rotary wine/off-set rotary wine craft |
| CN1993264A (en)* | 2004-07-29 | 2007-07-04 | 贝尔直升机泰克斯特龙公司 | Method and apparatus for flight control of tiltrotor aircraft |
| CN201086823Y (en)* | 2007-09-21 | 2008-07-16 | 深圳市艾特航模有限公司 | Rank double-oar minitype helicopter |
- 2010
- 2010-12-16CNCN 201010599982patent/CN102069905B/ennot_activeExpired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5782433A (en)* | 1995-04-27 | 1998-07-21 | Advanced Technology Institute Of Commuter-Helicopter, Ltd. | Engine deceleration device and power transmission device for helicopters |
| CN1544289A (en)* | 2003-11-21 | 2004-11-10 | 骞 穆 | Oneman vertical takeoff and landing aerial craft with double leaning and rotating culvert fan |
| CN1993264A (en)* | 2004-07-29 | 2007-07-04 | 贝尔直升机泰克斯特龙公司 | Method and apparatus for flight control of tiltrotor aircraft |
| CN1772561A (en)* | 2004-11-08 | 2006-05-17 | 赵润生 | Complex rotary wine/off-set rotary wine craft |
| CN201086823Y (en)* | 2007-09-21 | 2008-07-16 | 深圳市艾特航模有限公司 | Rank double-oar minitype helicopter |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102602536A (en)* | 2012-03-28 | 2012-07-25 | 郇心明 | Propeller movable airplane |
| CN102632994A (en)* | 2012-05-05 | 2012-08-15 | 扬州大学 | Tilt rotor aircraft |
| CN102632993A (en)* | 2012-05-05 | 2012-08-15 | 扬州大学 | Series-parallel tilting drive mechanism of tilt rotor aircraft |
| CN102632994B (en)* | 2012-05-05 | 2014-07-09 | 扬州大学 | Tilt rotor aircraft |
| CN103432750A (en)* | 2013-07-01 | 2013-12-11 | 钱志湘 | Front-engine rear-drive model aircraft |
| CN103432750B (en)* | 2013-07-01 | 2015-04-29 | 钱志湘 | Front-engine rear-drive model aircraft |
| CN106184739A (en)* | 2015-05-26 | 2016-12-07 | 空中客车防务和空间有限责任公司 | The flight equipment that can take off vertically |
| US10518875B2 (en) | 2015-05-26 | 2019-12-31 | Airbus Defence and Space GmbH | Vertical take-off aircraft |
| CN106184739B (en)* | 2015-05-26 | 2020-03-27 | 空中客车防务和空间有限责任公司 | Flying equipment capable of vertically taking off |
| CN108298069A (en)* | 2018-02-21 | 2018-07-20 | 江富余 | Variable-lift center helicopter |
| CN108454847A (en)* | 2018-03-21 | 2018-08-28 | 华南农业大学 | A kind of rotor attitude regulating mechanism and the multi-rotor unmanned aerial vehicle including the device |
| CN114929573A (en)* | 2020-12-28 | 2022-08-19 | 深圳市大疆创新科技有限公司 | Fluid guiding device, aircraft, blade and control method |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102069905B (en) | 2013-01-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102069905B (en) | Oblique wing helicopter | |
| CN101823556B (en) | Coaxial contrarotation birotor twelve-rotary wing air vehicle | |
| CN104925253A (en) | Triphibious coaxial four-rotor aircraft | |
| CN103072688A (en) | Tiltable four-rotor wing aircraft | |
| CN101973398A (en) | Tilt rotation driving mechanism for tilt rotation nacelle of tilt rotor craft | |
| CN105438458A (en) | Double-layer and eight-rotor-wing aircraft | |
| CN205633041U (en) | Changeable aircraft of overall arrangement between rotor and stationary vane | |
| CN113753229A (en) | Foldable fixed-wing four-rotor composite unmanned aerial vehicle and control method thereof | |
| CN203094442U (en) | Tilting four-rotor aircraft | |
| CN206623639U (en) | A kind of hovercar provided with tilting rotor | |
| CN220410908U (en) | A deformable land and air amphibious robot | |
| CN104859859B (en) | Pneumatic optimization oil-electricity hybrid multi-rotor aircraft | |
| WO2019080442A1 (en) | Rotorcraft | |
| WO2019154064A1 (en) | Gasoline-electric hybrid power vertical take-off and landing aircraft having driving rotors | |
| CN106927041A (en) | A kind of multiple degrees of freedom flapping-wing modal with propulsive efficiency high | |
| CN206871360U (en) | A kind of multiple degrees of freedom flapping-wing modal with high propulsive efficiency | |
| CN112141332A (en) | Five pole flapping wing aircraft in space based on just gentle coupling | |
| CN102632993B (en) | Series-parallel tilting drive mechanism of tilt rotor aircraft | |
| CN111516866A (en) | Single-drive tilt-twin rotorcraft | |
| CN216684845U (en) | Wing oar culvert body aircraft | |
| CN108163195A (en) | A kind of four axis rolling rotor aircraft | |
| CN113697097B (en) | Fixed wing aircraft overall aerodynamic layout with tiltable outer wings and rotor wings | |
| CN208715474U (en) | A multi-rotor drone | |
| CN102632994B (en) | Tilt rotor aircraft | |
| CN107662703B (en) | Electric double-coaxial same-side reverse tilting rotor aircraft |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | Granted publication date:20130102 Termination date:20151216 | |
| EXPY | Termination of patent right or utility model |