CN101881973A - active sun tracker - Google Patents
active sun trackerDownload PDFInfo
- Publication number
- CN101881973A CN101881973ACN2010102152335ACN201010215233ACN101881973ACN 101881973 ACN101881973 ACN 101881973ACN 2010102152335 ACN2010102152335 ACN 2010102152335ACN 201010215233 ACN201010215233 ACN 201010215233ACN 101881973 ACN101881973 ACN 101881973A
- Authority
- CN
- China
- Prior art keywords
- plc
- brushless motor
- azimuth
- angle
- counter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/50—Photovoltaic [PV] energy
Landscapes
- Photovoltaic Devices (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及太阳能光伏发电系统领域,特别是涉及一种能通过地理位置信息和当地时间值,自动准确跟踪太阳方位的太阳主动跟踪仪。The invention relates to the field of solar photovoltaic power generation systems, in particular to an active sun tracker capable of automatically and accurately tracking the sun's azimuth through geographical location information and local time values.
背景技术Background technique
随着人类对能源的需求的不断的增长,传统能源快速枯竭,太阳能是未来人类最理想的替代能源。科学家们公认,太阳能是未来人类最理想的替代能源。目前太阳能利用转化率约为10%-20%,理论分析表明:太阳的跟踪与非跟踪,能量的接收率相差37.7%,而智能跟踪太阳装置的设计是解决太阳能利用率低的一个重要途径。研究精确的太阳跟踪装置,可使太阳能组件的日平均发电量大大提高,从而在提高太阳能发电设备利用效率的同时降低发电成本。With the continuous growth of human demand for energy and the rapid depletion of traditional energy sources, solar energy is the most ideal alternative energy source for human beings in the future. Scientists agree that solar energy is the most ideal alternative energy source for future human beings. At present, the conversion rate of solar energy utilization is about 10%-20%. Theoretical analysis shows that the energy receiving rate differs by 37.7% between tracking the sun and non-tracking. The design of intelligent solar tracking device is an important way to solve the low utilization rate of solar energy. The study of precise sun tracking devices can greatly increase the daily average power generation of solar modules, thereby reducing the cost of power generation while improving the utilization efficiency of solar power generation equipment.
现有太阳跟踪装置多以光电式传感器,获取太阳位置的被动方式,来实现对太阳的跟踪。由于光电传感器对光线的依赖使其对环境的适应性差,在阴雨天,以及外部强光的影响,例如汽车灯光,闪电等,容易引起误动作,实用性差,不利于推广使用。Existing sun tracking devices mostly use photoelectric sensors to obtain the sun's position in a passive way to track the sun. Due to the photoelectric sensor's dependence on light, it has poor adaptability to the environment. In cloudy and rainy days, and the influence of external strong light, such as car lights, lightning, etc., it is easy to cause misoperation and poor practicability, which is not conducive to popularization and use.
发明内容Contents of the invention
为克服上述已有技术的不足,本发明要解决的技术问题是提供一种稳定的太阳跟踪装置,能够实现在各种气候,光学环境下对太阳光线进行高精度、低能耗的实时跟踪。In order to overcome the deficiencies of the above-mentioned prior art, the technical problem to be solved by the present invention is to provide a stable sun tracking device, which can realize real-time tracking of sunlight with high precision and low energy consumption in various climates and optical environments.
为解决上述技术问题,本发明的技术方案是:In order to solve the problems of the technologies described above, the technical solution of the present invention is:
一种太阳主动跟踪仪,包括底座、中央控制器、伺服驱动器、方位角机械回转单元、高度角机械旋转单元、太阳能电池模块和外部传感器模块,其中An active sun tracker, comprising a base, a central controller, a servo driver, an azimuth mechanical rotation unit, an altitude mechanical rotation unit, a solar cell module and an external sensor module, wherein
所述中央控制器包括PLC,该PLC将计算到的太阳方位角和高度角的变化换算成输出脉冲数,分别发送到方位角回转步进电机驱动器和高度角直流无刷电机的编码器、计数器;The central controller includes a PLC, which converts the calculated solar azimuth and altitude angle changes into output pulse numbers, and sends them to the encoders and counters of the azimuth rotary stepping motor driver and the altitude angle DC brushless motor respectively. ;
所述伺服运动器包括步进电机驱动器和控制直流无刷电机作位置闭环的编码器、计数器;The servo motion device includes a stepper motor driver, an encoder and a counter that control the DC brushless motor to perform a closed-loop position;
所述方位角机械回转单元包括方位角转动底座,方位角转动主轴,支撑箱体,具有自锁功能的蜗轮蜗杆传动副,以及方位角步进电机;The azimuth mechanical rotary unit includes an azimuth rotating base, an azimuth rotating main shaft, a supporting box, a worm gear pair with a self-locking function, and an azimuth stepping motor;
所述高度角旋转单元包括直线推杆,直流无刷电机,电池板旋转支架,电机支座;The elevation angle rotation unit includes a linear push rod, a DC brushless motor, a battery board rotation bracket, and a motor support;
所述外部传感器模块包括温度传感器,光电传感器,风速仪。The external sensor module includes a temperature sensor, a photoelectric sensor, and an anemometer.
所述的步进电机驱动器为脉冲加方向控制模式,接受PLC传来的方位角脉冲数,驱动方位角机械回转单元运行到指定角度。The stepper motor driver is in the pulse plus direction control mode, accepts the number of azimuth pulses from the PLC, and drives the azimuth mechanical rotary unit to run to a specified angle.
编码器安装在电池板支架水平旋转轴上,当电池板在电动推杆的推动下绕水平轴旋转时,编码器发出脉冲信号,计数器记录下脉冲数,与PLC传来的标定数据进行对比,当数值相等时,直流无刷电机停止运行,当小于标定数值时,直流无刷电机正转,反之,直流无刷电机反转。The encoder is installed on the horizontal rotation axis of the battery board bracket. When the battery board rotates around the horizontal axis under the push of the electric push rod, the encoder sends out a pulse signal, and the counter records the number of pulses and compares it with the calibration data from the PLC. When the values are equal, the brushless DC motor stops running. When the value is less than the calibration value, the brushless DC motor rotates forward, otherwise, the brushless DC motor reverses.
与现有技术相比,本发明的有益效果可以是:Compared with prior art, the beneficial effect of the present invention can be:
首先,该主动跟踪仪不受天气和外部环境影响,PLC可以连网控制,实现远程监控;其次,采用自锁的蜗轮蜗杆传动副和齿轮齿条传动副,结构简单,可以承受非常大的载荷,以及防止强风下丢失位置,实现精确跟踪;最后整个系统由自身的太阳能电池板提供能源,无需配备另外的电源模块,且系统采用间隙式运行,只有当太阳在有效发电高度角时才开始追踪,夜晚、连续阴雨天或强风天气时,系统将自动放平,回到零位,降低能量损耗。First of all, the active tracker is not affected by weather and external environment, and PLC can be connected to the network to realize remote monitoring; secondly, it adopts self-locking worm gear and rack and pinion transmission pairs, which has a simple structure and can withstand very large loads , and prevent loss of position under strong winds to achieve precise tracking; finally, the entire system is powered by its own solar panels, without the need for additional power modules, and the system uses intermittent operation, and only starts tracking when the sun is at an effective power generation altitude angle , At night, continuous rainy days or strong winds, the system will automatically level and return to zero to reduce energy loss.
本发明实现光伏发电系统的自动跟踪,远程联网控制,发电效率最优化。结构坚固耐用,安装简便,低能耗,维护简单。适应各种恶劣的天气与环境条件,可以在各种恶劣的环境下正常运作(强风,潮湿和沙漠环境等),在15级风情况下可以确保系统安全,在8级风以下可以正常工作。通过PLC独立控制单个系统,也可以能过局域网或无线通信实现远程控制。The invention realizes automatic tracking of the photovoltaic power generation system, remote networking control, and optimization of power generation efficiency. Sturdy and durable structure, easy installation, low energy consumption and simple maintenance. Adapt to all kinds of bad weather and environmental conditions, can operate normally in all kinds of bad environments (strong wind, humid and desert environment, etc.), can ensure the safety of the system under the wind condition of level 15, and can work normally under the wind level of level 8. A single system can be independently controlled by PLC, and remote control can also be realized through LAN or wireless communication.
附图说明Description of drawings
图1为本发明跟踪仪整体结构图。Fig. 1 is the overall structure diagram of the tracker of the present invention.
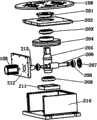
图2A为方位角机械回转单元构成元件及相对关系图;Fig. 2A is a diagram of the constituent elements and relative relationship of the azimuth mechanical rotary unit;
图2B为图2A的装配简图。Fig. 2B is a schematic assembly diagram of Fig. 2A.
图3为跟踪仪进行跟踪的基本原理框图。Figure 3 is a basic block diagram of the tracker for tracking.
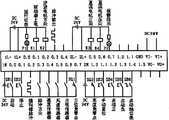
图4为跟踪仪的电气原理图。Figure 4 is the electrical schematic diagram of the tracker.
图中:In the picture:
101太阳能电池板,102电池板支架,103直线推杆,104电池板旋转支架,105直流无刷电机,106方位角转动底座,107方位角机械回转单元,108步进电机,109轴承座,110编码器。101 solar panel, 102 battery panel bracket, 103 linear push rod, 104 battery panel rotating bracket, 105 DC brushless motor, 106 azimuth rotating base, 107 azimuth mechanical rotary unit, 108 stepping motor, 109 bearing seat, 110 Encoder.
201圆锥滚子轴承端盖,202箱体顶板,203上圆锥滚子轴承,204蜗轮,205转动主轴,206蜗杆,207角接触球轴承端盖,208角接触球轴承,209下圆锥滚子轴承,210箱体,211下圆锥滚子轴承座,212步进电机座,213联轴器。201 tapered roller bearing end cover, 202 box top plate, 203 upper tapered roller bearing, 204 worm gear, 205 rotating main shaft, 206 worm, 207 angular contact ball bearing end cover, 208 angular contact ball bearing, 209 lower tapered roller bearing , 210 box, 211 under the tapered roller bearing, 212 stepper motor seat, 213 coupling.
具体实施方式Detailed ways
下面结合附图和实施例对本发明的具体实施方式做进一步详细的说明,但不应以此限制本发明的保护范围。The specific implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples, but the protection scope of the present invention should not be limited thereby.
本发明提出了一种太阳主动跟踪装置,其包括底座、中央控制器、伺服驱动器、方位角机械回转单元、高度角机械旋转单元,太阳能电池模块,外部传感器模块。太阳能电池模块包括:太阳能电池板,电池板支架,逆变器,蓄电池等,蓄电池为整个系统提供电能,由于系统采用间隙式运行,能耗低。The invention proposes an active sun tracking device, which includes a base, a central controller, a servo driver, an azimuth mechanical rotation unit, an altitude mechanical rotation unit, a solar cell module, and an external sensor module. The solar battery module includes: solar panels, battery panel brackets, inverters, batteries, etc. The batteries provide electrical energy for the entire system. Since the system uses intermittent operation, the energy consumption is low.
所述中央控制器包括PLC(可编程控制器)、接触器、断电器、热保护断路器、控制按钮。根据《天文算法》第24章中理论,当计算精度要求为0.01度,计算太阳位置时可假设地球运动是一个纯椭圆,也就是说忽略月球及行星的摄动,具体算法原理可参见该书相关章节。将当地的经纬度输入到PLC,设定PLC系统时钟与当地地方时间一致。PLC利用天文学理论计算出太阳的理论位置,再将计算到的太阳方位角和高度角的变化换算成输出脉冲数,分别发送到方位角回转步进电机驱动器,驱动步进电机旋转指定角度;和高度角直流无刷电机的编码器计数器,当高度角电机运行到指定位置时,计数器数值与计算数值相等,这样就分别实现了方位角和高度角跟踪。The central controller includes a PLC (programmable logic controller), a contactor, a breaker, a thermal circuit breaker, and a control button. According to the theory in Chapter 24 of "Astronomical Algorithms", when the calculation accuracy is required to be 0.01 degrees, the earth's motion can be assumed to be a pure ellipse when calculating the sun's position, that is to say, the perturbation of the moon and planets is ignored. The specific algorithm principle can be found in this book Related chapters. Input the local latitude and longitude into the PLC, and set the PLC system clock to be consistent with the local local time. The PLC uses astronomical theory to calculate the theoretical position of the sun, and then converts the calculated changes in the azimuth and altitude of the sun into output pulses, which are sent to the azimuth rotary stepper motor driver to drive the stepper motor to rotate at a specified angle; and The encoder counter of the altitude angle DC brushless motor, when the altitude angle motor runs to the specified position, the counter value is equal to the calculated value, so that the azimuth angle and altitude angle tracking are respectively realized.
所述伺服运动器包括步进电机驱动器和控制直流无刷电机作位置闭环的编码器,计数器。步进电机驱动器为脉冲加方向控制模式,接受PLC传来的方位角脉冲数,驱动方位角机械回转单元运行到指定角度。编码器安装在电池板支架水平旋转轴上,当电池板在电动推杆的推动下绕水平轴旋转时,编码器发出脉冲信号,计数器记录下脉冲数,与PLC传来的标定数据进行对比,当数值相等时,直流电机停止运行,当小于标定数值时,电机正转,反之,电机反转。The servo mover includes a stepper motor driver, an encoder and a counter that control the DC brushless motor as a closed-loop position. The stepper motor driver adopts the pulse plus direction control mode, accepts the number of azimuth pulses from the PLC, and drives the azimuth mechanical rotary unit to run to the specified angle. The encoder is installed on the horizontal rotation axis of the battery board bracket. When the battery board rotates around the horizontal axis under the push of the electric push rod, the encoder sends out a pulse signal, and the counter records the number of pulses and compares it with the calibration data from the PLC. When the values are equal, the DC motor stops running, when it is less than the calibration value, the motor rotates forward, otherwise, the motor reverses.
所述方位角机械回转单元包括方位角转动底座,方位角转动主轴,支撑箱体,具有自锁功能的蜗轮蜗杆传动副,以及方位角步进电机。方位角转动底座与电池板旋转支架座通过一组螺栓相连接,同时与方位角转动主轴通过主轴的方头与自身的方孔传递转矩,轴端用4个螺栓锁死,防止轴向攒动。蜗轮安装在主轴中部,主轴通过一对圆锥滚子轴承垂直安装在支撑箱体上。蜗杆能过一对角接触轴承水平安装与支撑箱体之上,蜗杆轴通过连轴器与步进电机相连,步进电机安装在支撑箱体电机架上。由于系统运行缓慢,蜗轮蜗杆传动副采用空气冷却,蜗轮采用铸铁材料,蜗杆采用普通碳钢经调质淬火处理。The azimuth mechanical rotary unit includes an azimuth rotating base, an azimuth rotating main shaft, a supporting box, a worm gear pair with a self-locking function, and an azimuth stepping motor. The azimuth rotation base is connected to the battery panel rotation bracket seat through a set of bolts, and at the same time, the azimuth rotation spindle transmits torque through the square head of the spindle and its own square hole, and the shaft end is locked with 4 bolts to prevent axial movement . The worm gear is installed in the middle of the main shaft, and the main shaft is vertically installed on the supporting box through a pair of tapered roller bearings. The worm can be horizontally installed on the support box through a pair of angular contact bearings, the worm shaft is connected with the stepping motor through a shaft coupling, and the stepping motor is installed on the support box motor frame. Due to the slow operation of the system, the worm gear and worm drive pair are air-cooled, the worm gear is made of cast iron, and the worm is made of ordinary carbon steel after quenching, tempering and quenching.
所述高度角旋转单元包括直线推杆,直流无刷电机,电池板旋转支架,电机支座。直流无刷电机与直线推杆通过联轴器想连接,并安装在电机支座上,电机支座通过螺栓安装在电池板旋转支架上,电池板支架通过两对轴承座与电池板支架相连接,直线推杆的顶端与电池支架通过销轴相连接。直线推杆内部为齿轮齿条传动,推杆推动电池板支架绕轴承座旋转,实现高度角跟踪。The elevation angle rotation unit includes a linear push rod, a DC brushless motor, a battery board rotation bracket, and a motor support. The DC brushless motor and the linear push rod are connected through a coupling and installed on the motor support. The motor support is installed on the battery plate rotating bracket through bolts. The battery plate support is connected to the battery plate support through two pairs of bearing seats. , the top of the linear push rod is connected with the battery bracket through a pin shaft. The interior of the linear push rod is driven by a rack and pinion, and the push rod pushes the battery board bracket to rotate around the bearing seat to achieve height angle tracking.
所述外部传感器模块包括温度传感器,光电传感器,风速仪。当外部温度过高或过低从而超出系统工作温度范围、或者是连续阴雨天,以及强风天气时,PLC获取信号后,跟据预定程式将太阳能电池板置于水平或垂直位置。The external sensor module includes a temperature sensor, a photoelectric sensor, and an anemometer. When the external temperature is too high or too low to exceed the working temperature range of the system, or it is continuous rainy days or strong winds, after the PLC gets the signal, it will place the solar panel in a horizontal or vertical position according to the predetermined program.
请参阅图1和图2A、图2B。图1是本发明跟踪仪整体结构图,表示了太阳主动跟踪仪的主要部件。图2A为方位角机械回转单元构成元件及相对关系图;图2B为图2A的装配简图。Please refer to Figure 1 and Figure 2A, Figure 2B. Fig. 1 is the overall structure diagram of the tracker of the present invention, showing the main components of the active sun tracker. Fig. 2A is a diagram of the constituent elements of the azimuth mechanical rotary unit and their relative relationships; Fig. 2B is a simplified assembly diagram of Fig. 2A.
各部件的装配关系参见图1和图2B。太阳能电池板101通过螺栓安装于电池板支架102上,电池板支架经由销轴安装在轴承座109上,编码器110的轴与销轴相连接,轴承座109与电池板旋转支架104相连接,电池板旋转支架104的底座与转动底座201通过一组螺栓相连接。直线推杆103顶端与电池板支架102中横梁上的铰座通过销轴相连接,另一端与直流无刷电机105相连接,并安装于电池板旋转支架104之上。The assembly relationship of each component is shown in Fig. 1 and Fig. 2B. The solar panel 101 is installed on the panel support 102 by bolts, the panel support is installed on the bearing seat 109 via the pin shaft, the shaft of the encoder 110 is connected with the pin shaft, and the bearing seat 109 is connected with the panel rotating bracket 104, The base of the battery panel rotating bracket 104 is connected with the rotating
箱体210与基座通过地脚螺栓固定,角接触球轴承208安装在箱体上的轴承座上,轴承座与箱体成一体,蜗杆206由一对角接触球轴承水平安装于箱体上,下圆锥滚子轴承座211与箱体底板通过螺钉连接,下圆锥滚子轴承209与上圆锥滚子轴承203背对背安装,转动主轴205垂直安装于圆锥滚子轴承上,其方头与方位角转动底座106的方孔相连接,并通过螺栓固定,蜗轮204安装于主轴中部与蜗杆206相啮合,箱体顶板202用于安装上圆锥滚子轴承203,2-2圆锥滚子轴承端盖将其固定于箱体顶板202上,步进电机108安装在步进电机座上212,通过联轴器213与蜗杆206相连接。The
系统的运行框图和电气原理图参见图3、图4,传感器将采集的信号发送到PLC中,温度,风速和光电传感器均输出一个开关量,当被测量值超出其预定范围时,其输出0(或1),反之,输出1(或0)。当PLC接收到的传感器信号为0(或1)时,PLC将控制系统运行到太阳能电池板呈水平位置后,停止运行。直到传感器信号再次为1(或0)时,系统重新运行。正常运行时PLC根据当地经纬度和时间计算出当前时刻太阳的方位角和高度角,当太阳高度角大于设定值时(例如高度角大于20度),系统进入跟踪状态,PLC将当前方位角转换成脉冲数,发送给步进电机驱动器,驱动器驱动步进电机带动蜗杆,通过蜗轮减速,由旋转主轴带动整个旋转支架和太阳能电池板旋转。当高度角变化时,PLC将计算出对应高度角变化的脉冲数,与计数器中脉冲数作比较,当计数器中脉冲数小于PLC计算出的脉冲数时,PLC控制直流无刷电机正转,直到二者相等,反之,电机反转直到二者相等。这样,随着时间的变化,PLC的计算值不断变化,从而实现实时跟踪。当太阳高度角小于指定值时(例如高度角小于20度)停止跟踪,系统运行到零点,电池板呈水平状态,系统进入休眠状态,直到下一次太阳高度角大于指定值时,系统再次启动。See Figure 3 and Figure 4 for the operating block diagram and electrical schematic diagram of the system. The sensor sends the collected signal to the PLC. The temperature, wind speed and photoelectric sensors all output a switch value. When the measured value exceeds its predetermined range, it outputs 0 (or 1), otherwise, output 1 (or 0). When the sensor signal received by the PLC is 0 (or 1), the PLC will run the control system until the solar panel is in a horizontal position, and then stop running. Until the sensor signal is 1 (or 0) again, the system runs again. During normal operation, the PLC calculates the azimuth and altitude angle of the sun at the current moment according to the local longitude, latitude and time. When the sun altitude angle is greater than the set value (for example, the altitude angle is greater than 20 degrees), the system enters the tracking state, and the PLC converts the current azimuth angle The number of pulses is sent to the stepper motor driver, the driver drives the stepper motor to drive the worm, and the worm gear decelerates, and the rotating spindle drives the entire rotating bracket and solar panel to rotate. When the altitude angle changes, the PLC will calculate the pulse number corresponding to the altitude angle change and compare it with the pulse number in the counter. When the pulse number in the counter is less than the pulse number calculated by the PLC, the PLC will control the DC brushless motor to rotate forward until The two are equal, otherwise, the motor reverses until the two are equal. In this way, with the change of time, the calculated value of PLC is constantly changing, so as to realize real-time tracking. When the sun altitude angle is less than the specified value (for example, the altitude angle is less than 20 degrees), stop tracking, the system runs to zero, the battery panel is in a horizontal state, and the system enters a dormant state until the next time the sun altitude angle is greater than the specified value, the system starts again.
温度传感器主要监测环境温度,当温度过低或过高时太阳能电池均无法正常工作,一般在-10℃~+80℃之间;风速传感器主要测量环境风速,当风速大于15级时,如果太阳能电池板正对风向,系统所承受的压力将超过其极限,整个支架有可能被破坏,所以当风速超过15级时,系统将运行到太阳能电池板呈水平状态,以使受风面最小,从而保证系统的不被强风所摧毁;光电传感器主要采集环境光强,当阴雨天时,环境光强明显下降,太阳能电池工作效率低下,系统呈负发电状态,所以此时要停止工作,直到光强足够时再重新运行。The temperature sensor mainly monitors the ambient temperature. When the temperature is too low or too high, the solar cells cannot work normally, generally between -10°C and +80°C; the wind speed sensor mainly measures the ambient wind speed. When the wind speed is greater than level 15, if the solar cell If the solar panel is facing the wind direction, the pressure on the system will exceed its limit, and the entire support may be damaged. Therefore, when the wind speed exceeds level 15, the system will operate until the solar panel is horizontal to minimize the wind surface, thereby Ensure that the system will not be destroyed by strong winds; the photoelectric sensor mainly collects the ambient light intensity. When it is cloudy and rainy, the ambient light intensity drops significantly, the working efficiency of the solar cell is low, and the system is in a negative power generation state, so stop working at this time until the light intensity is sufficient. and then re-run.
以上所述仅为本发明的较佳实施例而已,并非用来限定本发明的实施范围。任何所属技术领域中具有通常知识者,在不脱离本发明的精神和范围内,当可作各种的更动与润饰,因此本发明的保护范围应当视权利要求书所界定范围为准。The above descriptions are only preferred embodiments of the present invention, and are not intended to limit the implementation scope of the present invention. Anyone with ordinary knowledge in the technical field can make various changes and modifications without departing from the spirit and scope of the present invention. Therefore, the protection scope of the present invention should be based on the scope defined in the claims.
Claims (3)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2010102152335ACN101881973B (en) | 2010-06-30 | 2010-06-30 | active sun tracker |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2010102152335ACN101881973B (en) | 2010-06-30 | 2010-06-30 | active sun tracker |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101881973Atrue CN101881973A (en) | 2010-11-10 |
| CN101881973B CN101881973B (en) | 2012-02-01 |
Family
ID=43054005
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2010102152335AExpired - Fee RelatedCN101881973B (en) | 2010-06-30 | 2010-06-30 | active sun tracker |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN101881973B (en) |
Cited By (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102063128A (en)* | 2011-02-01 | 2011-05-18 | 河海大学常州校区 | Solar tracking and driving control system |
| CN102063129A (en)* | 2011-02-01 | 2011-05-18 | 河海大学常州校区 | Solar tracking control direction angle driving system |
| CN102475079A (en)* | 2010-11-24 | 2012-05-30 | 哈尔滨商业大学 | Automatic tracking solar insect killing device |
| CN102520734A (en)* | 2011-12-09 | 2012-06-27 | 厦门永华实业有限公司 | Rocker type condensed solar power station capable of synchronously tracking |
| CN102541033A (en)* | 2012-02-13 | 2012-07-04 | 无锡泰克塞斯新能源科技有限公司 | Tracking type photovoltaic power generation system capable of preventing disastrous weathers and implementation method thereof |
| CN102637043A (en)* | 2012-04-20 | 2012-08-15 | 杭州帷盛太阳能科技有限公司 | Roof single-axis photovoltaic tracking system |
| CN102749932A (en)* | 2012-07-13 | 2012-10-24 | 四川金翔环保科技有限公司 | Sun-tracking control system and method for solar streetlamp |
| CN102778896A (en)* | 2012-07-02 | 2012-11-14 | 洛阳师范学院 | Automatic solar tracking device |
| CN103197685A (en)* | 2013-04-11 | 2013-07-10 | 南京信息工程大学 | Solar automatic tracking system |
| CN103202584A (en)* | 2013-04-07 | 2013-07-17 | 江南大学 | Automatic steering umbrella |
| CN104156003A (en)* | 2014-09-04 | 2014-11-19 | 武汉易辰科技有限公司 | Novel heliostat control method |
| CN104483979A (en)* | 2014-10-31 | 2015-04-01 | 国家电网公司 | Novel linkage heliostat |
| CN104991568A (en)* | 2015-05-21 | 2015-10-21 | 中山诺顿科研技术服务有限公司 | solar tracking controller and tracking method thereof |
| CN105034994A (en)* | 2015-08-04 | 2015-11-11 | 宁波百基拉电子科技有限公司 | Automotive solar power supply device |
| CN106843287A (en)* | 2017-02-16 | 2017-06-13 | 江苏溢美合创新能源科技有限公司 | The control method of photovoltaic tracking controller, system and photovoltaic tracing system |
| CN107612476A (en)* | 2017-09-29 | 2018-01-19 | 南京昱晟机器人科技有限公司 | One kind follows robot and its follower method automatically |
| CN107702881A (en)* | 2017-11-08 | 2018-02-16 | 苏州大学 | Wind-tunnel wind resistance tests locating platform and its control system |
| CN107834950A (en)* | 2017-12-11 | 2018-03-23 | 山东理工昊明新能源有限公司 | A kind of BIPV electricity generation system |
| WO2018135934A1 (en)* | 2017-01-20 | 2018-07-26 | Ajdid Radouan | Rotary system for tracking the elevation of the sun - use: photovoltaic solar energy |
| CN109580465A (en)* | 2018-12-12 | 2019-04-05 | 中国兵器工业第五九研究所 | A kind of natural environment acceleration test apparatus and its application method for strengthening photo-thermal effect |
| CN109861633A (en)* | 2019-03-25 | 2019-06-07 | 江苏中信博新能源科技股份有限公司 | A kind of mechanical self-latching compact form photovoltaic tracking system |
| CN110759004A (en)* | 2019-12-25 | 2020-02-07 | 常州磐宇仪器有限公司 | Motor boundary determination method and self-adaptive positioning application thereof on sampling needle push rod |
| RU2813087C1 (en)* | 2023-07-21 | 2024-02-06 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Кубанский государственный технологический университет" (ФГБОУ ВО "КубГТУ") | Solar panel orientation device |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1369956A (en)* | 2002-01-17 | 2002-09-18 | 南京春辉科技实业有限公司 | Photovoltaic electric generation system automatically tracking sun |
| JP2005039148A (en)* | 2003-07-18 | 2005-02-10 | Shinichiro Kashiwazaki | Sun tracking apparatus for solar generator |
| CN1752660A (en)* | 2005-10-14 | 2006-03-29 | 中国科学院合肥物质科学研究院 | Sun tracking device and method based on tracking posture feedback |
| WO2007106519A2 (en)* | 2006-03-13 | 2007-09-20 | Green Volts, Inc. | Tracking solar power system |
| CN201263130Y (en)* | 2008-08-18 | 2009-06-24 | 彩熙太阳能环保技术(天津)有限公司 | Sun tracking device for solar power generation device |
- 2010
- 2010-06-30CNCN2010102152335Apatent/CN101881973B/ennot_activeExpired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1369956A (en)* | 2002-01-17 | 2002-09-18 | 南京春辉科技实业有限公司 | Photovoltaic electric generation system automatically tracking sun |
| JP2005039148A (en)* | 2003-07-18 | 2005-02-10 | Shinichiro Kashiwazaki | Sun tracking apparatus for solar generator |
| CN1752660A (en)* | 2005-10-14 | 2006-03-29 | 中国科学院合肥物质科学研究院 | Sun tracking device and method based on tracking posture feedback |
| WO2007106519A2 (en)* | 2006-03-13 | 2007-09-20 | Green Volts, Inc. | Tracking solar power system |
| CN201263130Y (en)* | 2008-08-18 | 2009-06-24 | 彩熙太阳能环保技术(天津)有限公司 | Sun tracking device for solar power generation device |
Cited By (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102475079A (en)* | 2010-11-24 | 2012-05-30 | 哈尔滨商业大学 | Automatic tracking solar insect killing device |
| CN102063129A (en)* | 2011-02-01 | 2011-05-18 | 河海大学常州校区 | Solar tracking control direction angle driving system |
| CN102063128B (en)* | 2011-02-01 | 2012-07-04 | 河海大学常州校区 | Solar tracking and driving control system |
| CN102063128A (en)* | 2011-02-01 | 2011-05-18 | 河海大学常州校区 | Solar tracking and driving control system |
| CN102520734A (en)* | 2011-12-09 | 2012-06-27 | 厦门永华实业有限公司 | Rocker type condensed solar power station capable of synchronously tracking |
| CN102541033A (en)* | 2012-02-13 | 2012-07-04 | 无锡泰克塞斯新能源科技有限公司 | Tracking type photovoltaic power generation system capable of preventing disastrous weathers and implementation method thereof |
| CN102637043A (en)* | 2012-04-20 | 2012-08-15 | 杭州帷盛太阳能科技有限公司 | Roof single-axis photovoltaic tracking system |
| CN102778896A (en)* | 2012-07-02 | 2012-11-14 | 洛阳师范学院 | Automatic solar tracking device |
| CN102749932B (en)* | 2012-07-13 | 2014-10-15 | 四川金翔环保科技有限公司 | Sun-tracking control system and method for solar streetlamp |
| CN102749932A (en)* | 2012-07-13 | 2012-10-24 | 四川金翔环保科技有限公司 | Sun-tracking control system and method for solar streetlamp |
| CN103202584B (en)* | 2013-04-07 | 2015-04-15 | 江南大学 | Automatic steering umbrella |
| CN103202584A (en)* | 2013-04-07 | 2013-07-17 | 江南大学 | Automatic steering umbrella |
| CN103197685A (en)* | 2013-04-11 | 2013-07-10 | 南京信息工程大学 | Solar automatic tracking system |
| CN104156003A (en)* | 2014-09-04 | 2014-11-19 | 武汉易辰科技有限公司 | Novel heliostat control method |
| CN104483979A (en)* | 2014-10-31 | 2015-04-01 | 国家电网公司 | Novel linkage heliostat |
| CN104991568A (en)* | 2015-05-21 | 2015-10-21 | 中山诺顿科研技术服务有限公司 | solar tracking controller and tracking method thereof |
| CN104991568B (en)* | 2015-05-21 | 2018-11-23 | 中山诺顿科研技术服务有限公司 | solar tracking controller and tracking method thereof |
| CN105034994A (en)* | 2015-08-04 | 2015-11-11 | 宁波百基拉电子科技有限公司 | Automotive solar power supply device |
| WO2018135934A1 (en)* | 2017-01-20 | 2018-07-26 | Ajdid Radouan | Rotary system for tracking the elevation of the sun - use: photovoltaic solar energy |
| CN106843287A (en)* | 2017-02-16 | 2017-06-13 | 江苏溢美合创新能源科技有限公司 | The control method of photovoltaic tracking controller, system and photovoltaic tracing system |
| CN107612476A (en)* | 2017-09-29 | 2018-01-19 | 南京昱晟机器人科技有限公司 | One kind follows robot and its follower method automatically |
| CN107702881A (en)* | 2017-11-08 | 2018-02-16 | 苏州大学 | Wind-tunnel wind resistance tests locating platform and its control system |
| CN107702881B (en)* | 2017-11-08 | 2024-01-05 | 苏州大学 | Wind tunnel wind-resistant experiment positioning platform and control system thereof |
| CN107834950A (en)* | 2017-12-11 | 2018-03-23 | 山东理工昊明新能源有限公司 | A kind of BIPV electricity generation system |
| CN107834950B (en)* | 2017-12-11 | 2024-03-19 | 山东理工昊明新能源有限公司 | Photovoltaic building integrated power generation system |
| CN109580465A (en)* | 2018-12-12 | 2019-04-05 | 中国兵器工业第五九研究所 | A kind of natural environment acceleration test apparatus and its application method for strengthening photo-thermal effect |
| CN109861633A (en)* | 2019-03-25 | 2019-06-07 | 江苏中信博新能源科技股份有限公司 | A kind of mechanical self-latching compact form photovoltaic tracking system |
| CN109861633B (en)* | 2019-03-25 | 2024-05-14 | 江苏中信博新能源科技股份有限公司 | Mechanical self-locking type photovoltaic tracking system |
| CN110759004A (en)* | 2019-12-25 | 2020-02-07 | 常州磐宇仪器有限公司 | Motor boundary determination method and self-adaptive positioning application thereof on sampling needle push rod |
| CN110759004B (en)* | 2019-12-25 | 2020-03-31 | 常州磐宇仪器有限公司 | Motor boundary determination method and self-adaptive positioning application thereof on sampling needle push rod |
| RU2813087C1 (en)* | 2023-07-21 | 2024-02-06 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Кубанский государственный технологический университет" (ФГБОУ ВО "КубГТУ") | Solar panel orientation device |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101881973B (en) | 2012-02-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101881973A (en) | active sun tracker | |
| CN102778896B (en) | Automatic solar tracking device | |
| CN202838034U (en) | Automatic sun tracking system | |
| CN105471377A (en) | Horizontal single axis sun-tracking support apparatus | |
| CN101825892A (en) | Centralized monitoring system for solar photovoltaic power generation tracking system | |
| CN101943914A (en) | Side-pull solar energy autotracker | |
| CN201623664U (en) | Intelligent solar tracking power station control system | |
| CN217063621U (en) | Autonomous solar photovoltaic power generation device | |
| CN202652112U (en) | Photosensitive linkage flat single-axis tracking solar photovoltaic power generation device | |
| WO2022027272A1 (en) | Sun-tracking type wind-solar complementary power generation system | |
| CN201754239U (en) | Centralized monitoring system for solar energy photovoltaic power generation tracking system | |
| CN202025236U (en) | Device capable of automatically tracking the Sun | |
| CN101599723B (en) | Toothed belt turbine transmission three-dimensional automatic solar tracking device | |
| CN102981515A (en) | Umbrella-type single axis tracking photovoltaic power generation system | |
| CN203133613U (en) | Solar energy tracking device based on servo control | |
| CN107300931A (en) | Sunshine method for tracing, device and solar power system | |
| CN202102316U (en) | Equator type photovoltaic cell tracking device | |
| CN101777856B (en) | Photovoltaic tracking device using photosensitive difference and network-based monitoring method | |
| CN201290078Y (en) | Component for tracking sun of solar photovoltaic battery array | |
| CN205657632U (en) | Solar double -axis automatic tracking system | |
| CN204965244U (en) | Photovoltaic power generation power supply system based on singlechip | |
| CN201994313U (en) | Sphere-shaped solar conversion device | |
| RU171448U1 (en) | DEVICE FOR AUTOMATIC ORIENTATION OF THE SOLAR BATTERY | |
| CN217010783U (en) | 5G basic station that solar charging | |
| CN214097835U (en) | A kind of optical power prediction meteorological environment monitoring equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | Granted publication date:20120201 Termination date:20140630 | |
| EXPY | Termination of patent right or utility model |