CN101716955B - Steering device for tracked vehicle and tracked vehicle with steering device - Google Patents
Steering device for tracked vehicle and tracked vehicle with steering deviceDownload PDFInfo
- Publication number
- CN101716955B CN101716955BCN2009102440132ACN200910244013ACN101716955BCN 101716955 BCN101716955 BCN 101716955BCN 2009102440132 ACN2009102440132 ACN 2009102440132ACN 200910244013 ACN200910244013 ACN 200910244013ACN 101716955 BCN101716955 BCN 101716955B
- Authority
- CN
- China
- Prior art keywords
- crawler
- fixed support
- steering
- vehicle
- steering device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000007246mechanismEffects0.000claimsabstractdescription17
- 238000010586diagramMethods0.000description8
- 238000010276constructionMethods0.000description6
- 238000004904shorteningMethods0.000description3
- 230000008859changeEffects0.000description2
- 239000004035construction materialSubstances0.000description2
- 238000000034methodMethods0.000description2
- 238000005516engineering processMethods0.000description1
- 239000000463materialSubstances0.000description1
- 230000004048modificationEffects0.000description1
- 238000012986modificationMethods0.000description1
- 230000008569processEffects0.000description1
- 239000002689soilSubstances0.000description1
- 230000007704transitionEffects0.000description1
Images



Landscapes
- Non-Deflectable Wheels, Steering Of Trailers, Or Other Steering (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及工程机械多履带转向装置,特别是涉及一种适合在沿海滩涂作业设备的履带转向装置。The invention relates to a multi-crawler steering device for construction machinery, in particular to a crawler steering device suitable for operating equipment on coastal beaches.
背景技术Background technique
随着国际能源形势的日益严峻,目前,国内外对沿海风能的开发如火如荼,但沿海滩涂存在地质承载力低、土壤易液化的特点,要求施工设备接地比压小。而进行沿海滩涂区域风电场建设时,物料和风电施工设备重量重(以1.5MW风机为例,单台基础施工物料近千吨、风机单台零部件最大运输量近百吨),为保证施工效率,施工设备较大,履带行走装置一般为多履带形式,传统的差速转向在滩涂路面上转向阻力大,转向不灵活,为提高沿海滩涂区域风电施工物料运输效率,迫切需要研制一种新型的车辆转向装置,以解决沿海滩涂风电施工多履带设备的转向难题。With the increasingly severe international energy situation, the development of coastal wind energy is in full swing at home and abroad. However, coastal tidal flats have the characteristics of low geological bearing capacity and easy liquefaction of soil, requiring construction equipment to be grounded with low specific pressure. When constructing wind farms in coastal tidal flat areas, the materials and wind power construction equipment are heavy (taking a 1.5MW wind turbine as an example, the foundation construction materials for a single unit are nearly 1,000 tons, and the maximum transportation volume for a single wind turbine is nearly 100 tons). efficiency, construction equipment is relatively large, and the crawler traveling device is generally in the form of multiple crawlers. The traditional differential steering has large steering resistance on tidal flat roads, and the steering is not flexible. In order to improve the efficiency of wind power construction material transportation in coastal tidal flat areas, it is urgent to develop a new type The vehicle steering device is designed to solve the steering problem of multi-track equipment for coastal wind power construction.
发明内容Contents of the invention
有鉴于此,本发明提供一种多履带转向装置,可使多履带车辆转向灵活,从而满足沿海滩涂区域大型设备的作业需求。In view of this, the present invention provides a multi-crawler steering device, which can make the multi-crawler vehicle steer flexibly, thereby meeting the operation requirements of large-scale equipment in coastal tidal flat areas.
根据本发明的一个方面,提供了一种用于履带式车辆的转向装置,其包括:至少四个履带行走装置,对称地布置在所述车辆的两侧并且每排包括两个履带行走装置,其中,每个履带行走装置均具有固定支座,所述固定支座包括沿其车辆的行走方向设置的第一固定支座和第二固定支座;以及转向机构,对应于同排的各个履带行走装置而设置。其中,每个转向机构均包括:第一伸缩件,可转动地连接在相应的两个履带行走装置的第一固定支座之间;第二伸缩件,可转动地连接在所述两个履带行走装置的第二固定支座之间;第三伸缩件,可转动地连接在所述两个履带行走装置之一的第一固定支座与所述两个履带行走装置中另一个的第二固定支座之间;以及第四伸缩件,可转动地连接在所述两个履带行走装置之一的第二固定支座与所述两个履带行走装置中另一个的第一固定支座之间,从而使得所述第三伸缩件与所述第四伸缩件在空间上呈交错关系。According to one aspect of the present invention, there is provided a steering arrangement for a tracked vehicle comprising: at least four crawlers arranged symmetrically on both sides of the vehicle and each row comprising two crawlers, Wherein, each crawler running device has a fixed support, and the fixed support includes a first fixed support and a second fixed support arranged along the traveling direction of the vehicle; and a steering mechanism, corresponding to each crawler belt in the same row set for walking gear. Wherein, each steering mechanism includes: a first telescopic element, which is rotatably connected between the first fixed supports of the corresponding two crawler running devices; a second telescopic element, which is rotatably connected between the two crawler belts. between the second fixed supports of the running device; the third telescopic member is rotatably connected between the first fixed support of one of the two crawler running devices and the second fixed support of the other of the two crawler running devices Between the fixed supports; and the fourth telescopic member, rotatably connected between the second fixed support of one of the two crawler running devices and the first fixed support of the other of the two crawler running devices space, so that the third telescopic member and the fourth telescopic member are in a staggered relationship in space.
优选地,所述履带行走装置的总数为四个,并且对称地布置在所述车辆的两侧。Preferably, the total number of the crawler running devices is four, and they are arranged symmetrically on both sides of the vehicle.
优选地,每个履带行走装置均包括并排设置的两条履带,所述固定支座设置在所述两条履带之间。Preferably, each crawler running device includes two crawlers arranged side by side, and the fixed support is arranged between the two crawlers.
优选地,所述第一伸缩件、第二伸缩件、第三伸缩件和第四伸缩件中的每一个均通过关节轴承连接于相应的固定支座。Preferably, each of the first telescopic element, the second telescopic element, the third telescopic element and the fourth telescopic element is connected to a corresponding fixed support through joint bearings.
优选地,所述第一伸缩件、第二伸缩件、第三伸缩件和第四伸缩件均包括液压油缸。Preferably, the first telescopic member, the second telescopic member, the third telescopic member and the fourth telescopic member all include hydraulic cylinders.
优选地,每个履带行走装置均包括履带以及设置在所述履带内侧的浮箱。且更优选地,每个履带行走装置均包括并排设置的两条履带以及设置在各履带内侧的浮箱,所述浮箱彼此固定连接。Preferably, each crawler running device includes a crawler belt and a pontoon arranged inside the crawler belt. And more preferably, each crawler running device includes two crawlers arranged side by side and a pontoon arranged inside each crawler, and the pontoons are fixedly connected to each other.
优选地,每个履带行走装置均由液压系统驱动。Preferably, each crawler is driven by a hydraulic system.
根据本发明的另一方面提供了一种履带式车辆,其包括具有上述结构的转向装置。According to another aspect of the present invention, a tracked vehicle is provided, which includes the steering device with the above structure.
与现有的履带差速转向技术相比,本发明提供的转向装置通过操控可伸缩的转向机构,控制包括液压油缸的伸缩件的伸长与缩短,从而改变车辆各履带行走装置的相对转角,并因此实现车辆的转向。根据三角形的三边的长短关系确定三边的相互角度可知,车辆的转向可通过调节各伸缩件的相对伸长与缩短以改变履带行走装置之间的相对角度来实现。使用该转向装置使得履带式车辆转向灵活、转向半径小、转场方便,并减小对路面的破坏,满足沿海滩涂风电施工要求。Compared with the existing crawler differential steering technology, the steering device provided by the present invention controls the extension and shortening of the telescopic parts including the hydraulic cylinder by manipulating the telescopic steering mechanism, thereby changing the relative rotation angle of each crawler running device of the vehicle, And thus realize the steering of the vehicle. According to the length relationship of the three sides of the triangle, the mutual angles of the three sides are determined, and the steering of the vehicle can be realized by adjusting the relative extension and shortening of each telescopic member to change the relative angle between the crawler running devices. The use of the steering device enables the tracked vehicle to turn flexibly, has a small turning radius, facilitates transition, reduces damage to the road surface, and meets the requirements of wind power construction in coastal beaches.
附图说明Description of drawings
通过以下结合附图的详细描述,本发明的上述和其它方面、特征和其它优点将得以更好地理解,附图中:The above and other aspects, features and other advantages of the present invention will be better understood through the following detailed description in conjunction with the accompanying drawings, in which:
图1A为根据本发明实施例的履带式车辆的转向装置10的结构示意图;1A is a schematic structural view of a steering device 10 of a tracked vehicle according to an embodiment of the present invention;
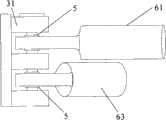
图1B为图1A转向装置10的用于连接转向结构6的固定支座的示意图;FIG. 1B is a schematic diagram of a fixed support for connecting the
图2A为图1A转向装置10在直线行驶中的示意图;FIG. 2A is a schematic diagram of the steering device 10 in FIG. 1A in straight travel;
图2B为图1A转向装置10左转向时的示意图;以及FIG. 2B is a schematic diagram of the steering device 10 in FIG. 1A when turning left; and
图2C为图1A转向装置10右转向时的示意图。FIG. 2C is a schematic diagram of the steering device 10 in FIG. 1A when turning right.
具体实施方式Detailed ways
下面结合附图,进一步详细说明本发明的具体实施方式。然而,本发明可以以很多不同形式实施,不应该被理解为仅限于这里所呈现的实施例。相反,提供了这些实施例,使得本公开全面而完整,并全面地将本发明的范围传达给本领域的技术人员。附图中,相同参考标号表示相同元件。The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings. This invention may, however, be embodied in many different forms and should not be construed as limited to only the embodiments presented herein. Rather, these embodiments are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the invention to those skilled in the art. In the drawings, the same reference numerals denote the same elements.
请参考图1A和图1B,其中,图1A为根据本发明实施例的履带式车辆的转向装置10的结构示意图;且图1B为图1A转向装置10的用于连接转向结构6的固定支座的示意图。根据本发明该实施例的转向装置10包括有多个履带行走装置,具体地,在该实施例中,其包括对称地布置在车辆两侧的四个履带行走装置,位于前排的两个以标号2表示,位于后排的两个以标号2’表示(参见图2A)。本领域技术人员可以理解,根据实际需要,也可设置多于四个的履带行走装置。该转向装置还包括转向机构,其设置在各排履带行走装置中,以使车辆转向。Please refer to FIG. 1A and FIG. 1B, wherein, FIG. 1A is a schematic structural view of a steering device 10 of a tracked vehicle according to an embodiment of the present invention; and FIG. 1B is a fixed support for connecting the
具体地,下面以前排的两个履带行走装置2为例进行说明。每个履带行走装置2均具有沿车辆行走方向设置的两个固定支座,即位于前部的第一固定支座31或32和位于后部的第二固定支座33或34。转向机构6对应于该前排的两个履带行走装置2而设置。该转向机构6包括:第一伸缩件61,可转动地连接在第一固定支座31和32之间;第二伸缩件62,可转动地连接在第二固定支座33和34之间;第三伸缩件63,可转动地连接在一个履带行走装置2的第一固定支座31与另一个履带行走装置2的第二固定支座34之间;以及第四伸缩件64,可转动地连接在一个履带行走装置2的第二固定支座33与另一个履带行走装置2的第一固定支座32之间,该第三伸缩件63与第四伸缩件64在空间上呈交错关系。本领域技术人员可以理解,同样地,后排的两个履带行走装置2’包括第一固定支座31’或32’和位于后部的第二固定支座33’或34’。且转向机构6’对应于该后排的两个履带行走装置2’而设置。该转向机构6’包括:第一伸缩件62’,可转动地连接在第一固定支座31’和32’之间;第二伸缩件61’,可转动地连接在第二固定支座33’和34’之间;以及第三伸缩件64’和第四伸缩件63’,彼此交叉且分别可转动地连接在第一固定支座31’和第二固定支座之间34’之间以及第一固定支座32’和第二固定支座33’之间。Specifically, the following two crawler
如图1A所示,每个履带行走装置2、2’均包括并排设置的两条履带24以及设置在各履带内侧的浮箱22,这两个浮箱22通过两端的连接件28和中间的连接件26彼此固定连接。优选地,两端的连接件28用于设置第一固定支座31、31’、32、32’和第二固定支座33、33’、34、34’,中间的连接件26用于设置基座4,以支撑车辆的车体。As shown in Fig. 1A, each crawler
在该实施例中,优选地,履带行走装置由液压系统(未示出)驱动,并且转向机构的各伸缩件可方便地包括液压油缸。并且,如图1B所示,以第一固定支座31为例,第一伸缩件61和第三伸缩件63均通过诸如球轴承的关节轴承5与第一固定支座31连接,从而在车辆的行走过程中,允许同排中的两个履带行走装置有相对错动,以适应路面不平。In this embodiment, preferably, the crawler is driven by a hydraulic system (not shown), and each telescoping member of the steering mechanism may conveniently comprise a hydraulic cylinder. And, as shown in FIG. 1B, taking the first fixed
根据三角形的三边长短关系决定了三边的相互角度,本发明的基本构思为,通过操控各伸缩件的伸长与缩短,使得履带行走装置绕着各自的回转中心旋转,从而改变各履带行走装置之间的角度,实现车辆的转向行驶。下面参照图2A-2C来说明根据本发明实施例的转向装置10的操作。图2A为图1A转向装置10在直线行驶中的示意图;图2B为图1A转向装置10左转向时的示意图;以及图2C为图1A转向装置10右转向时的示意图。According to the relationship between the lengths of the three sides of the triangle, the mutual angles of the three sides are determined. The basic idea of the present invention is to control the extension and shortening of each telescopic member, so that the crawler walking devices rotate around their respective centers of rotation, thereby changing the movement of each crawler belt. The angle between the devices realizes the turning of the vehicle. The operation of the steering device 10 according to the embodiment of the present invention will be described below with reference to FIGS. 2A-2C . 2A is a schematic diagram of the steering device 10 in FIG. 1A when driving straight; FIG. 2B is a schematic diagram of the steering device 10 in FIG. 1A when turning left; and FIG. 2C is a schematic diagram of the steering device 10 in FIG. 1A when turning right.
当车辆直线行驶时,如图2A所示,各伸缩件均锁死,每个转向机构的四个伸缩件具有相等的长度,同排中的两个履带行走装置的相对位置保持不变。When the vehicle is running straight, as shown in Figure 2A, each telescopic element is locked, and the four telescopic elements of each steering gear have equal lengths, and the relative positions of the two crawler running devices in the same row remain unchanged.
当车辆转向时,由于每个履带行走装置的回转中心(基座4)是固定在车体上的,其相对位置关系不会改变。因而,为使车辆顺利转向,原则上要求内外侧的履带行走装置相对整个车辆的瞬时转向中心O重合,由此导致车辆在转向时,其内外侧履带行走装置绕各自回转中心(基座4)的偏转角度不同,内侧履带行走装置的偏转角度α要大于外侧的偏转角度β。因此,车辆向左转向时,如图2B所示,通过液压油缸驱动,前排转向机构6的第二伸缩件62和第四伸缩件64以及后排转向机构6’的第一伸缩件62’和第三伸缩件64’同时缩短。其中,在例如由第二伸缩件62和第四伸缩件64以及右侧履带行走装置的两个固定支座32和34之间的距离构成的三角形中,第二伸缩件62和第四伸缩件64之间的夹角因其长短而改变;同理,第一伸缩件62’和第三伸缩件64’之间的夹角也因其长短而改变。因此,各履带行走装置受力绕其回转中心发生偏转且其余伸缩件61、63、61’、63’随动。类似地,当车辆向右转向时,如图2C所示,通过液压油缸驱动,前排转向机构6的第二伸缩件62和第三伸缩件63以及后排转向机构6’的第一伸缩件62’和第四伸缩件63’同时缩短,各履带行走装置受力绕其回转中心发生偏转且其余伸缩件61、64、61’、64’随动。When the vehicle turns, since the center of revolution (base 4) of each crawler traveling device is fixed on the vehicle body, its relative positional relationship will not change. Therefore, in order to make the vehicle turn smoothly, in principle, the inner and outer crawler running devices are required to coincide with the instantaneous steering center O of the entire vehicle, thus causing the inner and outer crawler running devices to rotate around their respective centers of rotation (base 4) when the vehicle is turning. The deflection angles are different, and the deflection angle α of the inner crawler traveling device is larger than the deflection angle β of the outer side. Therefore, when the vehicle turns left, as shown in FIG. 2B, the second
当车辆在转向到位后恢复直线行驶时,各伸缩件恢复至图2A所示状态。即,当左转向后恢复直线行驶时,伸缩件61、63、61’、63’同时缩短,其余伸缩件62、64、62’、64’随动;当右转向后恢复直线行驶时,伸缩件61、64、61’、64’缩短,而其余伸缩件62、63、62’、63’随动。When the vehicle resumes straight running after turning in place, each telescopic element returns to the state shown in FIG. 2A . That is, when returning to straight running after turning left, the
虽然已经结合目前被认为是实用示例性实施例对本发明进行了描述,然而,本领域的技术人员可以理解,本发明不限于所公开的示例性实施例。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。While the present invention has been described in connection with what are presently considered to be practical exemplary embodiments, it will be appreciated by those skilled in the art that the invention is not limited to the disclosed exemplary embodiments. Any modifications, equivalent replacements, improvements, etc. made within the spirit and principles of the present invention shall be included within the protection scope of the present invention.
Claims (9)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2009102440132ACN101716955B (en) | 2009-12-24 | 2009-12-24 | Steering device for tracked vehicle and tracked vehicle with steering device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2009102440132ACN101716955B (en) | 2009-12-24 | 2009-12-24 | Steering device for tracked vehicle and tracked vehicle with steering device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101716955A CN101716955A (en) | 2010-06-02 |
| CN101716955Btrue CN101716955B (en) | 2011-11-02 |
Family
ID=42431610
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2009102440132AExpired - Fee RelatedCN101716955B (en) | 2009-12-24 | 2009-12-24 | Steering device for tracked vehicle and tracked vehicle with steering device |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN101716955B (en) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102485573A (en)* | 2010-12-03 | 2012-06-06 | 三一电气有限责任公司 | A walking assembly and control method of a tracked engineering vehicle |
| CN102774437B (en)* | 2012-08-15 | 2015-06-17 | 中联重科股份有限公司 | Crawler chassis and crawler crane |
| CN106043427A (en)* | 2016-06-24 | 2016-10-26 | 伍锡如 | Multi-caterpillar-band type all-directional mobile platform |
| CN108846999B (en)* | 2018-07-01 | 2020-04-17 | 林文辉 | Clay soil burial survival signal generating device |
| CN109709987B (en)* | 2019-01-14 | 2020-05-19 | 北京理工大学 | Traction following device of crawler-type unmanned platform, control system and control method |
| CN113771945A (en)* | 2021-09-18 | 2021-12-10 | 河北工业大学 | Tracked robot turns to device |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5984032A (en)* | 1998-06-10 | 1999-11-16 | Gremillion; Ernest J. | Articulating marsh buggy |
| CN101058320A (en)* | 2007-05-18 | 2007-10-24 | 姚实现 | Transmission and control system for wheel-pedrail machinery and walking mechanism, wheel and pedrail walking mechanism, supporting device and engineering machinery |
| CN201049656Y (en)* | 2007-06-05 | 2008-04-23 | 陈令军 | Automatic balance crawler locomotive pedrail drive mechanism for bearing wheel |
| CN101195395A (en)* | 2007-12-14 | 2008-06-11 | 李琦 | Permanent magnetism square iron caterpillar chain robot |
| CN101214832A (en)* | 2008-01-09 | 2008-07-09 | 湖南大学 | Swing-arm diamond-shaped walking device combined with track and wheel |
| CN201296503Y (en)* | 2008-10-23 | 2009-08-26 | 阜新工大科技发展有限公司 | Snake shape moving belt type conveyor |
- 2009
- 2009-12-24CNCN2009102440132Apatent/CN101716955B/ennot_activeExpired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5984032A (en)* | 1998-06-10 | 1999-11-16 | Gremillion; Ernest J. | Articulating marsh buggy |
| CN101058320A (en)* | 2007-05-18 | 2007-10-24 | 姚实现 | Transmission and control system for wheel-pedrail machinery and walking mechanism, wheel and pedrail walking mechanism, supporting device and engineering machinery |
| CN201049656Y (en)* | 2007-06-05 | 2008-04-23 | 陈令军 | Automatic balance crawler locomotive pedrail drive mechanism for bearing wheel |
| CN101195395A (en)* | 2007-12-14 | 2008-06-11 | 李琦 | Permanent magnetism square iron caterpillar chain robot |
| CN101214832A (en)* | 2008-01-09 | 2008-07-09 | 湖南大学 | Swing-arm diamond-shaped walking device combined with track and wheel |
| CN201296503Y (en)* | 2008-10-23 | 2009-08-26 | 阜新工大科技发展有限公司 | Snake shape moving belt type conveyor |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101716955A (en) | 2010-06-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101716955B (en) | Steering device for tracked vehicle and tracked vehicle with steering device | |
| CN104249599B (en) | Portable mobile device with the sufficient compound propulsion function of wheel | |
| CN102146686B (en) | Bucket wheel excavator | |
| JP5548122B2 (en) | Water wheel | |
| CN102381378B (en) | Reconfigurable modular robot | |
| CN107140045B (en) | Spoke rotational deformation formula wheel carries out the compound running gear of leg | |
| US11708812B2 (en) | Energy harvesting device converting multiaxial translational and rotational motion to unidirectional rotational motion | |
| CN102923187A (en) | Follow-up steering control system of multi-axle automobile crane and multi-axle automobile crane | |
| CN202337293U (en) | Retractable-type track chassis | |
| CN106515851B (en) | An articulated steering device for a tracked all-terrain vehicle | |
| CN102712212A (en) | Deformable wheel assembly | |
| CN114604381A (en) | A photovoltaic platform structure that can withstand strong wind and waves with modular assembly construction | |
| CN217532435U (en) | Multi-spiral propeller | |
| CN114619814A (en) | Amphibious excavator | |
| CN201338915Y (en) | Amphibious crawling crane | |
| CN201971063U (en) | Four-wheel steering mechanism of a wheel type train | |
| CN202017178U (en) | Floater and serial floating bridge using the same | |
| CN202225936U (en) | Reconfiguration module of reconfigurable modular robot | |
| CN101450686A (en) | Compound drive walking mechanism | |
| CN116293190A (en) | Pipeline robot | |
| CN209241159U (en) | An omnidirectional steering mechanism | |
| CN205044905U (en) | Adopt inland water transportation freighter of little flat great circle bilge | |
| CN110043314A (en) | A kind of tunnel structure of quality classification water supply | |
| CN206870774U (en) | A kind of hydraulic booster beach car universal chassis | |
| CN215097899U (en) | Wide-narrow body crawler |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee | Granted publication date:20111102 Termination date:20121224 |