CN101340600B - Image noise evaluation system and method - Google Patents
Image noise evaluation system and methodDownload PDFInfo
- Publication number
- CN101340600B CN101340600BCN2007101260576ACN200710126057ACN101340600BCN 101340600 BCN101340600 BCN 101340600BCN 2007101260576 ACN2007101260576 ACN 2007101260576ACN 200710126057 ACN200710126057 ACN 200710126057ACN 101340600 BCN101340600 BCN 101340600B
- Authority
- CN
- China
- Prior art keywords
- noise
- noise evaluation
- evaluation index
- value
- pixel value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000011156evaluationMethods0.000titleclaimsabstractdescription154
- 238000000034methodMethods0.000titleclaimsabstractdescription26
- 230000033001locomotionEffects0.000claimsabstractdescription44
- 238000001514detection methodMethods0.000claimsabstractdescription13
- 238000004364calculation methodMethods0.000claimsdescription14
- 230000000007visual effectEffects0.000claims17
- 238000010586diagramMethods0.000description7
- 230000000694effectsEffects0.000description5
- 230000003068static effectEffects0.000description5
- 230000002123temporal effectEffects0.000description5
- 238000012545processingMethods0.000description4
- 238000001914filtrationMethods0.000description2
- 238000005070samplingMethods0.000description2
- 230000035945sensitivityEffects0.000description2
- 238000012935AveragingMethods0.000description1
- 206010047571Visual impairmentDiseases0.000description1
- 238000013459approachMethods0.000description1
- 230000005540biological transmissionEffects0.000description1
- 238000005259measurementMethods0.000description1
- 238000007619statistical methodMethods0.000description1
Images



Landscapes
- Image Analysis (AREA)
Abstract
Description
Translated fromChinese技术领域technical field
本发明涉及影像技术领域,特别涉及一种影像噪声评估系统及方法。The invention relates to the field of image technology, in particular to an image noise evaluation system and method.
背景技术Background technique
电视信号在传输过程中容易受到干扰产生噪声,为了减少噪声的干扰,显示装置端一般会包含降噪处理。然而,不管是空间域的降噪方式还是时间域的降噪方式,都可能产生不同的处理副作用。一般而言,较佳的降噪方式是先分析输入影像的噪声程度,再根据不同的噪声程度进行不同强度的降噪处理。Television signals are prone to interference and generate noise during transmission. In order to reduce the interference of noise, the display device generally includes noise reduction processing. However, no matter the noise reduction method in the spatial domain or the noise reduction method in the temporal domain, different processing side effects may occur. Generally speaking, a better noise reduction method is to first analyze the noise level of the input image, and then perform different intensities of noise reduction processing according to different noise levels.
美国专利US5,844,627公告公开了一空间降噪(spatial noise reduction)方法,先分析空间频率的组成,再对可能是噪声成分的频带进行压抑。然而,空间降噪的方法无法完全区分空间中的噪声成分及视频成分,容易产生视频模糊的副作用。美国专利US6,259,489公告公开了一时间降噪(temporal noise reduction)方法,利用在静态影像时,假定噪声在时间轴上属于非关联性(uncorrelated)且平均值为零,则可以把不同时间同一空间位置的影像点,随着时间轴进行平均,可达到降低噪声的变异值(variance),产生较低噪声强度的视频。然而,时间降噪的方式虽然在静态影像上可以达到不损失空间清晰度而执行降噪,但此方法必须配合检测视频中有运动物体发生的部份,才能避免不当的将不同空间位置的取样点平均而产生的运动模糊或是残影。U.S. Patent No. 5,844,627 discloses a spatial noise reduction (spatial noise reduction) method, which first analyzes the composition of spatial frequencies, and then suppresses frequency bands that may be noise components. However, the method of spatial noise reduction cannot completely distinguish the noise components in the space from the video components, and is prone to produce side effects of video blur. U.S. Patent No. 6,259,489 discloses a temporal noise reduction method. When using a static image, assuming that the noise is uncorrelated on the time axis and the average value is zero, the same The image points at the spatial position are averaged along the time axis to reduce the variance of the noise and produce a video with lower noise intensity. However, although temporal noise reduction can achieve noise reduction on static images without loss of spatial clarity, this method must cooperate with the detection of moving objects in the video to avoid improper sampling of different spatial positions Motion blur or afterimages caused by point averaging.
一般而言,当噪声程度大的时候,观赏者对于因降噪所引起副作用的容许度相对也较大,当噪声程度小的时候,观赏者对于因降噪所引起副作用的容许度相对变小。为了避免在噪声小的视频信号使用过强的降噪滤波方法而产生无法接受的瑕疵,或是在噪声大的视频信号中使用过小的降噪滤波方法而导致降噪程度不足,故准确的测量输入视频信号中的噪声程度,通过使用合适的降噪滤波强度,可以达到较好的降噪处理效果。Generally speaking, when the noise level is high, the viewer's tolerance for side effects caused by noise reduction is relatively large; when the noise level is small, the viewer's tolerance for side effects caused by noise reduction is relatively small . In order to avoid unacceptable flaws caused by using too strong noise reduction filtering method in the video signal with low noise, or insufficient noise reduction degree caused by using too small noise reduction filtering method in the noisy video signal, the accurate Measure the noise level in the input video signal, and use the appropriate noise reduction filter strength to achieve better noise reduction processing effect.
为了测量输入视频信号中的噪声程度,美国专利US 5,657,401公告利用时间上的差异的绝对值和(sum of temporal absolute difference)和一组临界值比较。当此绝对值和落于该组临界值的上下临界值中,则将一累加器加一,并统计在一个预先设定的区间中落在该区间的像素个数是否和一期望值相同,若不同则调整该组临界值,并通过此临界值来反映视频信号中的噪声程度大小。然而,如果影像中具有运动的区域,由于这些区域的运动比例不相同,使得要利用预先设定的点数的期望值不易确定,噪声程度的测量也易受到影像中运动点数的影响。In order to measure the degree of noise in the input video signal, the US Patent No. 5,657,401 announcement utilizes the absolute value sum of temporal differences (sum of temporal absolute difference) and a set of critical value comparisons. When the absolute value sum falls in the upper and lower critical values of the set of critical values, add one to an accumulator, and count whether the number of pixels falling in this interval in a preset interval is the same as an expected value, if If it is different, adjust this set of critical values, and use this critical value to reflect the degree of noise in the video signal. However, if there are moving areas in the image, the expected value of using the preset points is not easy to determine due to the different motion ratios of these areas, and the measurement of the noise level is also easily affected by the moving points in the image.
针对上述问题,美国专利US 6,307,888公告利用已进行过运动评估(motionestimation)的信息,将信号分成静态的区块及动态的区块,分别和对应位置(静态)或对应运动补偿的区块(动态)进行运算(如差值的绝对值和),分别求出静态区块的噪声评估值和动态区块的噪声评估值,再将两者混合得到最后的噪声评估值。但这样的方式必须以准确的运动估测技术为基础,才能对动态区块的噪声程度进行正确的估算。然而,一般电视显示系统中并不包含进行运动估测及补偿的功能。In response to the above problems, U.S. Patent No. 6,307,888 uses the information of motion estimation (motion estimation) to divide the signal into static blocks and dynamic blocks, which are respectively compared with corresponding positions (static) or corresponding motion compensation blocks (dynamic ) to perform operations (such as the sum of the absolute values of the differences), to obtain the noise evaluation value of the static block and the noise evaluation value of the dynamic block respectively, and then mix the two to obtain the final noise evaluation value. However, such an approach must be based on an accurate motion estimation technology in order to correctly estimate the noise level of the dynamic block. However, the general TV display system does not include the function of motion estimation and compensation.
美国专利US2006/0221252公开中则分析时间上的差值绝对值的大小分布转换成一特征值,和理想分布转换的特征值比较,决定该影像得到的噪声程度该保留还是放弃。不同的运动程度一般会影响差值分布,然而,视频中可能出现不同数量的运动点数及产生不同大小的运动时间差值,因而造成差值绝对值的分布随着运动的不同而渐渐的改变,增加了最后决定保留或舍弃的临界值设定的困难度。由此可知,现有影像噪声评估系统及方法仍有改善的空间。In the disclosure of US2006/0221252, the size distribution of the absolute value of the difference in time is analyzed and converted into an eigenvalue, and compared with the eigenvalue converted from the ideal distribution, it is determined whether to retain or discard the noise level obtained by the image. Different degrees of motion will generally affect the difference distribution. However, different numbers of motion points and different sizes of motion time differences may appear in the video, thus causing the distribution of the absolute value of the difference to gradually change with different motions. Increased the difficulty of setting the threshold for the final decision to keep or discard. It can be seen that there is still room for improvement in the existing image noise assessment system and method.
发明内容Contents of the invention
本发明的一个主要目的在于提供一种影像噪声评估系统及方法,用于排除差值较大的噪声评估值,从而避免噪声评估结果受到影像中全域运动的影响而被高估。A main purpose of the present invention is to provide an image noise evaluation system and method for excluding noise evaluation values with large differences, so as to prevent the noise evaluation result from being overestimated due to the influence of global motion in the image.
本发明的另一目的在于提供一种影像噪声评估系统及方法,可以在影像有运动发生时,增加噪声评估值的差异性,降低运动临界值及子影像区域范围设定的敏感度。Another object of the present invention is to provide an image noise evaluation system and method, which can increase the variance of the noise evaluation value and reduce the sensitivity of setting the motion threshold and sub-image area range when motion occurs in the image.
依据本发明的一个主要目的,本发明提出一种影像噪声评估系统,用于对一当前影像执行噪声评估,该系统包含一储存装置、多个视窗型噪声评估装置、一比较装置及一全域移动检测装置。所述储存装置储存所述当前影像的前一张影像;所述多个视窗型噪声评估装置分别连接至所述储存装置,用于对所述当前影像及所述前一张影像的对应区域执行噪声评估,并分别输出与所述视窗对应的一噪声评估指标及一调整噪声评估指标;所述比较装置连接至所述多个视窗型噪声评估装置,用于比较多个所述调整噪声评估指标并选取最小值输出,同时输出一视窗指标(window index),所述视窗指标为所述最小调整噪声评估指标的视窗;所述全域移动检测装置连接至所述多个视窗型噪声评估装置及所述比较装置,当所述最小调整噪声评估指标小于一临界值时,输出与所述最小调整噪声评估指标对应的所述噪声评估指标,作为所述当前影像的噪声评估值。According to a main object of the present invention, the present invention proposes an image noise evaluation system for performing noise evaluation on a current image, the system comprising a storage device, a plurality of window type noise evaluation devices, a comparison device and a global mobile detection device. The storage device stores the previous image of the current image; the plurality of window-type noise evaluation devices are respectively connected to the storage device, and are used to execute the corresponding regions of the current image and the previous image. Noise evaluation, and respectively output a noise evaluation index and an adjusted noise evaluation index corresponding to the window; the comparison device is connected to the plurality of window-type noise evaluation devices for comparing a plurality of the adjusted noise evaluation indexes And select the minimum value output, and output a window index (window index) at the same time, the window index is the window of the minimum adjustment noise evaluation index; the global motion detection device is connected to the plurality of window type noise evaluation devices and the The comparison device is configured to output the noise evaluation index corresponding to the minimum adjusted noise evaluation index as the noise evaluation value of the current image when the minimum adjusted noise evaluation index is less than a critical value.
所述每个视窗型噪声评估装置包含:第一噪声评估器、分布计算装置、信赖值产生装置和乘法器;Each of the window-type noise evaluation devices includes: a first noise evaluator, a distribution calculation device, a trust value generation device and a multiplier;
所述第一噪声评估器,连接至所述储存装置,用于对所述当前影像及所述前一张影像的对应区域执行噪声评估,并输出所述噪声评估指标;The first noise evaluator, connected to the storage device, is used to perform noise evaluation on the corresponding regions of the current image and the previous image, and output the noise evaluation index;
所述分布计算装置,连接至所述第一噪声评估器,用于计算所述当前影像及所述前一张影像在所述视窗型噪声评估装置涵盖的影像区域中像素值差值的正负号分布,并输出一正号数目及一负号数目;The distribution calculating device is connected to the first noise evaluator, and is used to calculate the positive or negative of the pixel value difference between the current image and the previous image in the image area covered by the window-type noise evaluating device sign distribution, and output a number of positive signs and a number of negative signs;
该分布计算装置包含:第一比较器、第一计数器、第二比较器和第二计数器;The distributed calculation device includes: a first comparator, a first counter, a second comparator and a second counter;
所述第一比较器,一第一输入端接收所述像素值PN(i,j),一第二输入端接收所述像素值PN-1(i,j),当所述像素值PN(i,j)大于所述像素值PN-1(i,j)时,输出一第一触发信号;以及In the first comparator, a first input terminal receives the pixel value PN (i, j), and a second input terminal receives the pixel value PN-1 (i, j), when the pixel value When PN (i, j) is greater than the pixel value PN-1 (i, j), output a first trigger signal; and
所述第一计数器,连接至所述第一比较器,依据所述第一触发信号计数,输出所述正号数目;The first counter is connected to the first comparator, counts according to the first trigger signal, and outputs the number of positive signs;
所述第二比较器,一第一输入端接收所述像素值PN(i,j),一第二输入端接收所述像素值PN-1(i,j),当所述像素值PN(i,j)小于所述像素值PN-1(i,j)时,输出一第二触发信号;以及In the second comparator, a first input terminal receives the pixel value PN (i, j), and a second input terminal receives the pixel value PN-1 (i, j), when the pixel value When PN (i, j) is smaller than the pixel value PN-1 (i, j), outputting a second trigger signal; and
所述第二计数器,连接至所述第二比较器,依据所述第二触发信号计数,输出所述负号数目;The second counter is connected to the second comparator, counts according to the second trigger signal, and outputs the number of negative signs;
所述信赖值产生装置,连接至所述分布计算装置,用于依据所述正号数目及所述负号数目输出一信赖值;所述信赖值为:1+|No(+)-No(-)|/total_no,式中,No(+)为所述正号数目,No(-)为所述负号数目,total_no为所述视窗型噪声评估装置涵盖的影像区域的所有像素值数目;The trust value generating device is connected to the distribution calculation device, and is used to output a trust value according to the number of positive signs and the number of negative signs; the trust value is: 1+|No(+)-No( -)|/total_no, where No(+) is the number of positive signs, No(-) is the number of negative signs, and total_no is the number of all pixel values in the image area covered by the window type noise evaluation device;
所述乘法器,连接至所述信赖值产生装置及所述第一噪声评估器,第一输入端接收所述噪声评估指标,一第二输入端接收所述信赖值,用于将所述噪声评估指标与所述信赖值相乘,得到所述调整噪声评估指标。The multiplier is connected to the trust value generating device and the first noise estimator, a first input terminal receives the noise evaluation index, a second input terminal receives the trust value, and is used to convert the noise The evaluation index is multiplied by the trust value to obtain the adjusted noise evaluation index.
所述全域移动检测装置进一步用于当所述最小调整噪声评估指标大于或等于所述临界值时,输出一标记,用于表示所述当前影像的噪声评估值受到全域运动的影响。The global motion detection device is further configured to output a flag when the minimum adjusted noise evaluation index is greater than or equal to the critical value, indicating that the noise evaluation value of the current image is affected by global motion.
所述噪声评估指标为:The noise evaluation index is:
式中,i、j为所述视窗型噪声评估装置涵盖的影像区域,PN(i,j)为所述当前影像在所述视窗型噪声评估装置涵盖的影像区域的像素值,PN-1(i,j)为所述前一张影像在所述视窗型噪声评估装置涵盖的影像区域的像素值。In the formula, i, j are the image areas covered by the window-type noise evaluation device, PN (i, j) is the pixel value of the current image in the image area covered by the window-type noise evaluation device, PN- 1 (i, j) is the pixel value of the previous image in the image area covered by the window-type noise evaluation device.
依据本发明的另一目的,本发明提出一种影像噪声评估方法,对一当前影像执行噪声评估,该方法包含下列步骤:一储存步骤储存所述当前影像的前一张影像;多个视窗型噪声评估步骤,每一个视窗型噪声评估步骤分别对所述当前影像及所述前一张影像的对应区域执行噪声评估,并分别输出与所述视窗对应的一噪声评估指标及一调整噪声评估指标;一比较步骤,比较所述多个调整噪声评估指标并选取最小值输出,同时输出一视窗指标,所述视窗指标为所述最小调整噪声评估指标的视窗;一全域移动检测步骤,当所述最小调整噪声评估指标小于一临界值时,输出与所述最小调整噪声评估指标对应的所述噪声评估指标,作为所述当前影像的噪声评估值,当所述最小调整噪声评估指标大于或等于所述临界值时,输出一标记,表示所述当前影像的噪声评估值受到全域运动的影响。According to another object of the present invention, the present invention proposes an image noise evaluation method, which performs noise evaluation on a current image, and the method includes the following steps: a storage step stores the previous image of the current image; a plurality of window types A noise evaluation step, each window-type noise evaluation step performs noise evaluation on the corresponding regions of the current image and the previous image, and respectively outputs a noise evaluation index and an adjusted noise evaluation index corresponding to the window ; a comparison step, comparing the plurality of adjustment noise evaluation indexes and selecting the minimum value output, and outputting a window index at the same time, the window index is the window of the minimum adjustment noise evaluation index; a global movement detection step, when the described When the minimum adjusted noise evaluation index is less than a critical value, output the noise evaluation index corresponding to the minimum adjusted noise evaluation index as the noise evaluation value of the current image; when the minimum adjusted noise evaluation index is greater than or equal to the When the critical value is exceeded, a flag is output, indicating that the noise evaluation value of the current image is affected by global motion.
该分布计算步骤具体包括:一第一比较步骤,当所述像素值PN(i,j)大于所述像素值PN-1(i,j)时,输出一第一触发信号;一第一计数步骤,依据所述第一触发信号计数,输出所述正号数目;一第二比较步骤,当所述像素值PN(i,j)小于所述像素值PN-1(i,j)时,输出一第二触发信号;以及一第二计数步骤,依据所述第二触发信号计数,输出所述负号数目;The distribution calculation step specifically includes: a first comparison step, outputting a first trigger signal when the pixel value PN (i, j) is greater than the pixel value PN-1 (i, j); a first A counting step, counting according to the first trigger signal, outputting the number of positive signs; a second comparison step, when the pixel value PN (i, j) is less than the pixel value PN-1 (i, When j), output a second trigger signal; and a second counting step, count according to the second trigger signal, and output the number of negative signs;
所述信赖值为:1+|No(+)-No(-)|/total_no,式中,No(+)为所述正号数目,No(-)为所述负号数目,total_no为所述视窗型噪声评估装置涵盖的影像区域的所有像素值数目;The reliability value is: 1+|No(+)-No(-)|/total_no, where No(+) is the number of positive signs, No(-) is the number of negative signs, and total_no is the number of negative signs. The number of all pixel values in the image area covered by the window-type noise evaluation device;
附图说明Description of drawings
图1为本发明影像噪声评估系统的结构示意图Fig. 1 is the structural representation of image noise evaluation system of the present invention
图2为本发明视窗型噪声评估装置与当前影像及前一张影像的对应区域示意图。FIG. 2 is a schematic diagram of the window-type noise evaluation device of the present invention and the corresponding areas of the current image and the previous image.
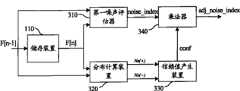
图3为本发明视窗型噪声评估装置的结构示意图。Fig. 3 is a structural schematic diagram of the window-type noise evaluation device of the present invention.
图4为本发明分布计算装置的结构示意图。FIG. 4 is a schematic structural diagram of a distributed computing device of the present invention.
附图中的标号说明Explanation of symbols in the attached drawings
储存装置110
多个视窗型噪声评估装置120Multiple windows type
比较装置130
全域移动检测装置140Global
第一噪声评估器310
分布计算装置320Distributed
信赖值产生装置330
乘法器340
第一比较器410
第一计数器420
第二比较器430
第二计数器440
具体实施方式Detailed ways
图1为本发明影像噪声评估系统的结构示意图,用于对一当前影像执行噪声评估,该系统包含一储存装置110、多个视窗型噪声评估装置120、一比较装置130、及一全域移动检测装置140。其中,储存装置110储存当前影像F[n]的前一张影像F[n-1]。1 is a schematic structural diagram of an image noise evaluation system of the present invention, which is used to perform noise evaluation on a current image. The system includes a
多个视窗型噪声评估装置120连接至储存装置110,用于对当前影像F[n]及前一张影像F[n-1]的对应区域执行噪声评估,并输出与视窗对应的一噪声评估指标noise_index及一调整噪声评估指标adj_noise_index。A plurality of window-type
图2为本发明视窗型噪声评估装置与当前影像及前一张影像的对应区域示意图。其中,第一视窗型噪声评估装置121对应当前影像F[n]及前一张影像F[n-1]的区域1,第二视窗型噪声评估装置122对应当前影像F[n]及前一张影像F[n-1]的区域2,依此类推。在本实施例中,使用五个视窗型噪声评估装置120,仅仅是为了方便说明而举的实施例而已,本发明所主张的权利范围应以发明申请范围所述为准,而非仅限于上述实施例。FIG. 2 is a schematic diagram of the window-type noise evaluation device of the present invention and the corresponding areas of the current image and the previous image. Among them, the first window-type
图3为本发明视窗型噪声评估装置的结构示意图,每一个视窗型噪声评估装置包含一第一噪声评估器310、一分布计算装置320、一信赖值产生装置330及一乘法器340。3 is a structural schematic diagram of a window-type noise evaluation device of the present invention, each window-type noise evaluation device includes a
第一噪声评估器310连接至储存装置110,用于对当前影像F[n]及前一张影像F[n-1]的对应区域执行噪声评估,并输出噪声评估指标noise_index。其中,噪声评估指标noise_index为:The
式中,i、j为视窗型噪声评估装置涵盖的影像区域,PN(i,j)为当前影像F[n]在视窗型噪声评估装置涵盖的影像区域的像素值,PN-1(i,j)为前一张影像F[n-1]在视窗型噪声评估装置涵盖的影像区域的像素值。例如,在第一视窗型噪声评估装置121中,i、j为图2中区域1涵盖的影像区域,PN(i,j)为当前影像F[n]在区域1的像素值,PN-1(i,j)为前一张影像F[n-1]在区域1的像素值。其他视窗型噪声评估装置中的区域及对应关系可依此类推。In the formula, i and j are the image areas covered by the window-type noise evaluation device, PN (i, j) is the pixel value of the current image F[n] in the image area covered by the window-type noise evaluation device, PN-1 ( i, j) are the pixel values of the previous image F[n-1] in the image area covered by the window type noise evaluation device. For example, in the first window type
分布计算装置320连接至第一噪声评估器310及储存装置110,用于计算当前影像F[n]及前一张影像F[n-1]在视窗型噪声评估装置涵盖的影像区域中像素值差值的正负号分布,并输出一正号数目No(+)及一负号数目No(-)。The
图4为本发明分布计算装置的结构示意图,分布计算装置320包含一第一比较器410、一第一计数器420、一第二比较器430、一第二计数器440。FIG. 4 is a schematic structural diagram of the distributed computing device of the present invention. The distributed
第一比较器410的第一输入端接收像素值PN(i,j),第二输入端接收像素值PN-1(i,j),当像素值PN(i,j)大于像素值PN-1(i,j)时,输出第一触发信号trigger1。第一计数器420连接至第一比较器410,依据第一触发信号trigger1计数,输出正号数目No(+)。The first input terminal of the
第二比较器430的第一输入端接收像素值PN(i,j),第二输入端接收像素值PN-1(i,j),当像素值PN(i,j)小于像素值PN-1(i,j)时,输出第二触发信号trigger2。第二计数器440连接至第二比较器430,依据第二触发信号trigger2计数,输出负号数目No(-)。The first input terminal of the
信赖值产生装置330连接至分布计算装置320,依据正号数目No(+)及负号数目No(-)输出一信赖值conf。信赖值conf为:The confidence
1+|No(+)-No(-)|/total_no,1+|No(+)-No(-)|/total_no,
式中,No(+)为正号数目,No(-)为负号数目,total_no为视窗型噪声评估装置涵盖的影像区域的所有像素值数目。举例来说,在第一视窗型噪声评估装置121中,total_no为图2中区域1涵盖的影像区域的像素值数目。In the formula, No(+) is the number of positive signs, No(-) is the number of negative signs, and total_no is the number of all pixel values in the image area covered by the window type noise evaluation device. For example, in the first window type
乘法器340连接至信赖值产生装置330及第一噪声评估器310,第一输入端接收噪声评估指标noise_index,第二输入端接收信赖值conf,用于将噪声评估指标乘上信赖值,得到调整噪声评估指标adj_noise_index。The
参照图1,比较装置130连接至多个视窗型噪声评估装置120,对多个调整噪声评估指标adj_noise_index1~adj_noise_index5进行比较并从中选取最小值(min_adj_noise_index)输出,同时输出一视窗指标(window_index),视窗指标为最小调整噪声评估指标的视窗。Referring to Fig. 1, the
全域移动检测装置140连接至多个视窗型噪声评估装置120及比较装置130,当最小调整噪声评估指标min_adj_noise_index小于一临界值Th时,输出与最小调整噪声评估指标对应的噪声评估指标noise_index,作为当前影像的噪声评估值。亦即,举例来说,当adj_noise_index1为最小时,比较装置130以adj_noise_index1作为最小调整噪声评估指标min_adj_noise_index并输出,此时,全域移动检测装置140输出noise_index1作为当前影像的噪声评估值。当最小调整噪声评估指标大于或等于该临界值Th时,输出一标记(flag),用于表示当前影像的噪声评估值受到全域运动的影响。The global
当信赖值conf为1时,表示正号数目No(+)等于负号数目No(-)。如果第二视窗型噪声评估装置122对应的区域2中有移动(motion)时,输出的正号数目No(+)将大于负号数目No(-)、或者小于负号数目No(-),此时信赖值conf大于1,将引起第二视窗型噪声评估装置122对应的adj_noise_index2增大,因此,比较装置130选取第二视窗型噪声评估装置122对应的noise_index2的概率降低,这样可避免动态影像区域入选,从而提高了噪声评估的准确度。When the confidence value conf is 1, it means that the number of positive signs No(+) is equal to the number of negative signs No(-). If there is movement (motion) in the
本发明通过选取影像区域中多数子影像区域范围,对于每一个子影像区域范围中的像素值计算时间上的差值,同时分析差值的正负号分布,从而计算出一信赖值,用于反映差值不受运动影响的程度,反映差值不受运动影响的信心指数越高,差值从噪声产生的可能性越大,信心指数越低,则差值从运动产生的可能性越大。根据每一个子影像区域范围的信心指数给予该子影像区域范围计算出的噪声评估指标不同的权重值,然后比较各子影像区域范围权重后的噪声评估指标并选取最小值,以最小值对应的子影像区域范围未进行权重调整前的噪声评估指标作为该当前影像区域的噪声评估值。The present invention selects most sub-image areas in the image area, calculates the difference in time for the pixel values in each sub-image area, and analyzes the sign distribution of the difference at the same time, thereby calculating a trust value for use in Reflects the degree to which the difference is not affected by motion. The higher the confidence index reflecting that the difference is not affected by motion, the greater the possibility that the difference will be generated from noise, and the lower the confidence index, the greater the possibility that the difference will be generated from motion . According to the confidence index of each sub-image area, the noise evaluation index calculated by the sub-image area is given different weight values, and then the noise evaluation index after the weight of each sub-image area is compared and the minimum value is selected, and the minimum value corresponds to The noise evaluation index of the sub-image area before weight adjustment is used as the noise evaluation value of the current image area.
本发明基于将影像区域区分成不同的子影像区域范围,分别统计各子影像区域范围的噪声评估指标,由于一般噪声评估指标包含噪声产生及运动产生的成分,在同一信号中,子影像区域范围噪声评估指标越小,反映出噪声的影响程度越小。但在这种统计方式中,需要考虑如何选择子影像区域范围的大小。一般而言,子影像区域范围越小,可以使统计的范围中发生运动的概率越低,但另一方面,太小的子影像区域范围又会使噪声的评估指标过于区域化,无法反映整体影像区域的噪声程度。此外,除了考虑子影像区域范围选择,还需考虑可能发生的全域运动(如镜头移动),如果发生全域运动,本发明噪声评估方式就仍然需要将每个子影像区域范围得到的结果和一运动临界值进行比较,以排除差值较大的噪声评估值,避免噪声评估结果受到全域运动的影响而高估。对于子影像区域范围较小的情况,虽然对于范围内差值的计算较不容易受到运动的影响,但是由于取样点数较少,噪声程度估算的变异比较大。The present invention is based on dividing the image area into different sub-image areas, and counting the noise evaluation indicators of each sub-image area respectively. Since the general noise evaluation index includes noise generation and motion generation components, in the same signal, the sub-image area range The smaller the noise evaluation index, the smaller the impact of noise. However, in this statistical method, it is necessary to consider how to select the size of the sub-image area. Generally speaking, the smaller the sub-image area, the lower the probability of motion in the statistical range, but on the other hand, the too small sub-image area will make the noise evaluation index too regional and cannot reflect the overall Noise level of the image area. In addition, in addition to considering the range selection of the sub-image area, possible global motion (such as camera movement) must also be considered. If global motion occurs, the noise evaluation method of the present invention still needs to combine the results of each sub-image area with a motion threshold Values are compared to exclude noise evaluation values with large differences and avoid overestimation of noise evaluation results due to global motion. For the case of a small sub-image area, although the calculation of the difference within the range is not easily affected by motion, due to the small number of sampling points, the variation of the noise level estimation is relatively large.
本发明利用具有最小差值的子影像区域范围统计的噪声评估指标,作为整体噪声评估值,加入考虑分析运动发生的可能性,利用该可能性对噪声评估指标加入不同的权重,可以在有运动发生时,增加噪声评估值的差异性,降低运动临界值及子影像区域范围设定的敏感度。The present invention utilizes the statistical noise evaluation index of the sub-image region with the smallest difference as the overall noise evaluation value, and considers the possibility of analyzing the occurrence of motion, and uses this possibility to add different weights to the noise evaluation index, which can be used when there is motion When it occurs, increase the variance of the noise evaluation value, and reduce the sensitivity of the motion threshold and sub-image area range settings.
上述实施例仅仅是为了方便说明而举例而已,本发明所主张的权利范围应以发明申请范围所述为准,而非仅限于上述实施例。The above-mentioned embodiments are only examples for convenience of description, and the scope of rights claimed by the present invention should be based on the scope of the invention application, rather than limited to the above-mentioned embodiments.
Claims (5)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2007101260576ACN101340600B (en) | 2007-07-06 | 2007-07-06 | Image noise evaluation system and method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2007101260576ACN101340600B (en) | 2007-07-06 | 2007-07-06 | Image noise evaluation system and method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101340600A CN101340600A (en) | 2009-01-07 |
| CN101340600Btrue CN101340600B (en) | 2010-06-16 |
Family
ID=40214531
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2007101260576AExpired - Fee RelatedCN101340600B (en) | 2007-07-06 | 2007-07-06 | Image noise evaluation system and method |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN101340600B (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109726693B (en)* | 2019-01-02 | 2021-05-07 | 京东方科技集团股份有限公司 | Method, apparatus, medium and electronic equipment for evaluating environmental noise of equipment |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1419680A (en)* | 2001-01-26 | 2003-05-21 | 皇家菲利浦电子有限公司 | Spatio-temporal filter unit and image display apparatus comprising such a spatio-temporal filter unit |
| CN1781459A (en)* | 2004-12-01 | 2006-06-07 | Ge医疗系统环球技术有限公司 | Dose evaluating method and X-ray CT apparatus |
| CN1867040A (en)* | 2005-05-19 | 2006-11-22 | 晨星半导体股份有限公司 | noise suppression method |
- 2007
- 2007-07-06CNCN2007101260576Apatent/CN101340600B/ennot_activeExpired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1419680A (en)* | 2001-01-26 | 2003-05-21 | 皇家菲利浦电子有限公司 | Spatio-temporal filter unit and image display apparatus comprising such a spatio-temporal filter unit |
| CN1781459A (en)* | 2004-12-01 | 2006-06-07 | Ge医疗系统环球技术有限公司 | Dose evaluating method and X-ray CT apparatus |
| CN1867040A (en)* | 2005-05-19 | 2006-11-22 | 晨星半导体股份有限公司 | noise suppression method |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101340600A (en) | 2009-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6888564B2 (en) | Method and system for estimating sharpness metrics based on local edge kurtosis | |
| Feichtenhofer et al. | A perceptual image sharpness metric based on local edge gradient analysis | |
| JP5708916B2 (en) | Image evaluation method, image evaluation system, and program | |
| US12125173B2 (en) | Video denoising method and device, and computer readable storage medium | |
| US9454805B2 (en) | Method and apparatus for reducing noise of image | |
| US20040012675A1 (en) | Method and apparatus for measuring the quality of video data | |
| US8063993B2 (en) | Image noise measurement system and method | |
| CN101727662A (en) | SAR image nonlocal mean value speckle filtering method | |
| CN104468916A (en) | Test method based on cell phone response time | |
| CN104751441A (en) | Method and device for estimating image noise | |
| US9602762B2 (en) | Fallback in frame rate conversion system | |
| CN111445435A (en) | No-reference image quality evaluation method based on multi-block wavelet transform | |
| US7428343B2 (en) | Apparatus and method of measuring noise in a video signal | |
| CN101340600B (en) | Image noise evaluation system and method | |
| KR20140046187A (en) | Motion estimation apparatus and method thereof in a video system | |
| JP2007528137A (en) | Asymmetrically enhanced image and video sharpness metrics | |
| JP4289170B2 (en) | Noise amount measuring apparatus and video receiver | |
| US20080316363A1 (en) | System and method for estimating noises in a video frame | |
| JP2012227791A (en) | Image processor, image processing method, program and recording medium | |
| CN106611405B (en) | Image interpolation method and device | |
| KR101899070B1 (en) | Method and Apparatus for No-reference Image Quality Assessment by Quantfying Robustness against Random Signal | |
| CN101355647B (en) | System and method for estimating video noise | |
| KR100652954B1 (en) | Noise Estimator Using Flat Region of Image | |
| Bai et al. | Video quality temporal pooling using a visibility measure | |
| Masry et al. | Perceived quality metrics for low bit rate compressed video |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee | Granted publication date:20100616 Termination date:20160706 |