CN101038299A - Uniaxle integrated inertia measurement device based on single mass-block - Google Patents
Uniaxle integrated inertia measurement device based on single mass-blockDownload PDFInfo
- Publication number
- CN101038299A CN101038299ACN 200710061740CN200710061740ACN101038299ACN 101038299 ACN101038299 ACN 101038299ACN 200710061740CN200710061740CN 200710061740CN 200710061740 ACN200710061740 ACN 200710061740ACN 101038299 ACN101038299 ACN 101038299A
- Authority
- CN
- China
- Prior art keywords
- mass
- fixed
- glass cover
- block
- device based
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000005259measurementMethods0.000titleclaimsabstractdescription15
- 239000011521glassSubstances0.000claimsabstractdescription21
- 238000001514detection methodMethods0.000claimsabstractdescription13
- 239000008188pelletSubstances0.000claimsabstractdescription6
- 230000000694effectsEffects0.000claimsdescription7
- 238000004873anchoringMethods0.000claimsdescription4
- 230000015572biosynthetic processEffects0.000claims1
- 239000003990capacitorSubstances0.000abstractdescription6
- 238000012545processingMethods0.000abstractdescription5
- 210000001520combAnatomy0.000abstractdescription4
- 238000005516engineering processMethods0.000abstractdescription2
- 239000013598vectorSubstances0.000abstract1
- 238000000034methodMethods0.000description9
- 230000001133accelerationEffects0.000description6
- XUIMIQQOPSSXEZ-UHFFFAOYSA-NSiliconChemical compound[Si]XUIMIQQOPSSXEZ-UHFFFAOYSA-N0.000description4
- 230000010354integrationEffects0.000description4
- 229910052710siliconInorganic materials0.000description4
- 239000010703siliconSubstances0.000description4
- 244000126211Hericium coralloidesSpecies0.000description2
- 238000006073displacement reactionMethods0.000description2
- 238000011160researchMethods0.000description2
- 238000004458analytical methodMethods0.000description1
- 238000004364calculation methodMethods0.000description1
- 238000006880cross-coupling reactionMethods0.000description1
- 238000009795derivationMethods0.000description1
- 238000013461designMethods0.000description1
- 238000009434installationMethods0.000description1
- 238000004519manufacturing processMethods0.000description1
- 230000035945sensitivityEffects0.000description1
- 238000004088simulationMethods0.000description1
Images


Landscapes
- Gyroscopes (AREA)
Abstract
Translated fromChinese
Description
Translated fromChinese技术领域technical field
本发明涉及微机械电子技术,具体是一种基于单质量块的单轴集成惯性测量器件。The invention relates to micro-mechanical electronic technology, in particular to a single-axis integrated inertial measurement device based on a single mass block.
背景技术Background technique
目前,硅微惯性测量组合通常有两种组合方式:一种是通过机械装配将6个单轴惯性传感器(即3个加速度计和3个陀螺仪)按需要分别安装在立方体的几个正交面上,可称为多片集成。其中各惯性传感器比较独立,可以根据需要灵活选用;但该方式不适于量产并且会因安装造成各传感器敏感轴不能完全正交,进而影响姿态解算;另一种则是通过一种微细加工工艺将所需的多个硅微惯性传感器同时在硅片上加工出来,甚至可能将接口电路也集成在硅片上,可称之为单片集成。单片集成的方式避免了复杂的机械组装,还可以批量生产,同时所采用的微细加工工艺可以充分保障各个惯性传感器之间的正交度.但该集成方式仍不够成熟,研究主要集中在大学为主的科研机构中。At present, there are usually two combinations of silicon micro-inertial measurement combinations: one is to install six single-axis inertial sensors (that is, three accelerometers and three gyroscopes) in several orthogonal cubes as required by mechanical assembly. On the surface, it can be called multi-chip integration. Among them, each inertial sensor is relatively independent and can be flexibly selected according to needs; but this method is not suitable for mass production and the sensitive axes of each sensor will not be completely orthogonal due to installation, which will affect the attitude calculation; the other is through a microfabrication The process processes the required multiple silicon micro inertial sensors on the silicon chip at the same time, and even integrates the interface circuit on the silicon chip, which can be called monolithic integration. The monolithic integration method avoids complicated mechanical assembly and can also be mass-produced. At the same time, the microfabrication process used can fully guarantee the orthogonality between each inertial sensor. However, this integration method is still not mature enough, and research is mainly concentrated in universities. major research institutions.
传统测量某一方向线加速度和角加速度时,通常将两个单轴的加速度计、陀螺仪组装在一起构成单轴的惯性测量组合,这样构成的单质量块单轴集成惯性测量器件测量组合的机械精度和微小化程度都有所降低,同时,将一个加速度计和一个陀螺仪制作在一起,结构相对复杂,体积和质量相对大。When traditionally measuring linear acceleration and angular acceleration in a certain direction, two uniaxial accelerometers and gyroscopes are usually assembled together to form a single-axis inertial measurement combination. Both the mechanical precision and the miniaturization degree are reduced. At the same time, an accelerometer and a gyroscope are made together, the structure is relatively complex, and the volume and mass are relatively large.
发明内容Contents of the invention
本发明为了解决现有由一个加速度计和一个陀螺仪组装成的微惯性测量组合(即单轴微惯性测量组合)存在结构相对复杂、体积和质量相对较大等问题,提供一种基于单质量块的单轴集成惯性测量器件。并只以提供该器件的表头硬件结构为目的,不涉及(公知的)输出信号的后续处理及相应得处理电路。In order to solve the problems of the existing micro-inertial measurement combination assembled by an accelerometer and a gyroscope (that is, a single-axis micro-inertial measurement combination), the present invention provides a single-mass based block of single-axis integrated inertial measurement devices. And it is only for the purpose of providing the meter hardware structure of the device, and does not involve the (known) subsequent processing of the output signal and the corresponding processing circuit.
本发明是采用如下技术方案实现的:基于单质量块的单轴集成惯性测量器件,包括质量块、玻璃盖底,质量块通过支撑梁支悬于玻璃盖底上方,质量块由质量芯块、和通过弹性梁分别与质量芯块四边相固定的四块支撑体构成,Y向相对的支撑体外侧固定有检测活动梳齿,X向相对的支撑体外侧固定有驱动活动梳齿,与检测活动梳齿、驱动活动梳齿配合的检测固定梳齿和驱动固定梳齿固定于玻璃盖底上,质量芯块的下端面与玻璃盖底上对应地固定有构成平板电容的电极。The present invention is realized by adopting the following technical scheme: a single-axis integrated inertial measurement device based on a single-mass block, including a mass block and a glass cover bottom, the mass block is suspended above the glass cover bottom through support beams, and the mass block is composed of mass core blocks, It is composed of four supports fixed to the four sides of the mass core through elastic beams. The outer side of the support body opposite to the Y direction is fixed with a detection movable comb, and the outer side of the support body opposite to the X direction is fixed with a drive movable comb. The comb teeth, the detection fixed comb teeth matched with the driving movable comb teeth and the driving fixed comb teeth are fixed on the bottom of the glass cover, and the lower end surface of the mass pellet and the bottom of the glass cover are correspondingly fixed with electrodes constituting the plate capacitance.
所述支撑梁为折叠状弹性梁,其端部设有用于将其与玻璃盖底锚固的锚固块。The supporting beam is a folded elastic beam, and an anchoring block for anchoring it to the bottom of the glass cover is provided at its end.
使用时,将该测量器件固定于载体上,当载体受到沿Z方向的线加速度时,测量器件随着载体在Z方向作线性运动,使得质量块产生一个Z方向上的位移,从而引起质量芯块的下端面和玻璃盖底上的对应电极所构成的平板电容的电容值发生变化;同时,在驱动固定梳齿上加载交变的驱动电压(即沿X方向加载静电驱动力),在驱动电压作用下,质量块沿X方向作简谐振动,当载体受到沿Z方向角速度时,由于哥氏效应,便会产生一个沿Y方向的哥氏力,此时,质量块便会沿Y方向的振动,产生位移,从而使得由检测活动梳齿与检测固定梳齿构成的梳齿电容的电容值发生变化,通过梳齿电容和平板电容的电容值的变化,通过后续信号处理得出Z向的加速度值和角速度值。When in use, the measuring device is fixed on the carrier. When the carrier is subjected to a linear acceleration along the Z direction, the measuring device moves linearly with the carrier in the Z direction, causing the mass block to produce a displacement in the Z direction, thereby causing the mass core to The capacitance value of the plate capacitor formed by the lower end surface of the block and the corresponding electrode on the bottom of the glass cover changes; at the same time, an alternating driving voltage (that is, an electrostatic driving force is applied along the X direction) is applied to the driving fixed comb teeth, and the Under the action of voltage, the mass block vibrates in the X direction. When the carrier is subjected to angular velocity along the Z direction, a Coriolis force along the Y direction will be generated due to the Coriolis effect. At this time, the mass block will move along the Y direction. Vibration, resulting in displacement, so that the capacitance value of the comb capacitor composed of the detection movable comb and the detection fixed comb changes, through the change of the capacitance value of the comb capacitor and the plate capacitor, the Z direction is obtained through subsequent signal processing acceleration and angular velocity values.
与现有技术相比,本发明采用由质量芯块、和通过弹性梁分别与质量芯块四边相固定的四块支撑体构成的质量块结构,并将驱动梳齿与检测梳齿分别对称的分布于四个支撑体上,不但提高了测量灵敏度;同时,亦能将x、y、z三轴各自的运动对其它方向产生的影响降到最小,结构在Y方向运动时,X向支撑梁的变形可以忽略不计,可将它们看作是固定的锚点,而只考虑Y向两支撑梁的变形;同理,当结构在X方向运动时,Y向两支撑梁的变形可以忽略不计。可由本技术领域的技术人员通过仿真实验和原理推导分析证实;再次,采用折叠状弹性梁作为支撑梁,使得各个方向的机械交叉耦合相对较小,并具有一定的应力释放作用,有很高的综合性能,提高了量程和线性度。单独输出、检测加速度和角速度两种信号,减小了两种信号的分离难度,简化了后续信号处理电路的设计。Compared with the prior art, the present invention adopts a mass block structure composed of a mass core block and four supports respectively fixed to the four sides of the mass core block through elastic beams, and the driving combs and detection combs are respectively symmetrical Distributed on four supports, it not only improves the measurement sensitivity; at the same time, it can also minimize the influence of the respective movements of the x, y, and z axes on other directions. When the structure moves in the y direction, the support beam in the x direction The deformation can be ignored, they can be regarded as fixed anchor points, and only the deformation of the two supporting beams in the Y direction is considered; similarly, when the structure moves in the X direction, the deformation of the two supporting beams in the Y direction can be ignored. It can be confirmed by those skilled in the art through simulation experiments and principle derivation analysis; again, using folded elastic beams as support beams makes the mechanical cross-coupling in all directions relatively small, and has a certain stress release effect, which has a high Comprehensive performance, improved range and linearity. Two signals of acceleration and angular velocity are output and detected separately, which reduces the difficulty of separating the two signals and simplifies the design of subsequent signal processing circuits.
本发明结构合理,易于加工,能同时敏感同方向上的加速度和角速度值,具有可靠性高、体积小、抗干扰能力强、精度高、检测向量平行和正交精度高等显著特点,避免了因分立元件组合所带来的各种不必要的误差。实用价值较高。The invention has a reasonable structure, is easy to process, and can be sensitive to acceleration and angular velocity values in the same direction at the same time. Various unnecessary errors caused by component combinations. High practical value.
附图说明Description of drawings
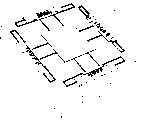
图1为本发明的结构示意图;Fig. 1 is a structural representation of the present invention;
图2为图1的A-A剖面图;Fig. 2 is the A-A sectional view of Fig. 1;
图3为本发明的结构立体示意图;Fig. 3 is a schematic perspective view of the structure of the present invention;
图中:1-玻璃盖底;2-支撑梁;3-质量芯块;4-支撑体;5-弹性梁;6-检测活动梳齿;7-检测固定梳齿;8-驱动活动梳齿;9-驱动固定梳齿;10-电极;11-锚固块。In the figure: 1-glass cover bottom; 2-support beam; 3-mass core block; 4-support body; 5-elastic beam; 6-detection movable comb; 7-detection fixed comb; 8-drive movable comb ; 9-drive fixed comb; 10-electrode; 11-anchor block.
具体实施方法Specific implementation method
基于单质量块的单轴集成惯性测量器件,包括质量块、玻璃盖底1,质量块通过支撑梁2支悬于玻璃盖底1上方,质量块由质量芯块3、和通过弹性梁5分别与质量芯块3四边相固定的四块支撑体4构成,Y向相对的支撑体4外侧固定有检测活动梳齿6,X向相对的支撑体外侧固定有驱动活动梳齿8,与检测活动梳齿6、驱动活动梳齿8配合的检测固定梳齿7和驱动固定梳齿9固定于玻璃盖底1上,质量芯块3的下端面与玻璃盖底1上对应地固定有构成平板电容的电极10。所述支撑梁2为折叠状弹性梁,其端部设有用于将其与玻璃盖底1锚固的锚固块11。A single-axis integrated inertial measurement device based on a single mass block, including a mass block and a
具体实施时,质量芯块3每边和支撑体4通过两个平行弹性梁5固定;质量块的单个支撑体4通过对称的四个支撑梁2支撑固定。During specific implementation, each side of the
Claims (3)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 200710061740CN101038299A (en) | 2007-04-21 | 2007-04-21 | Uniaxle integrated inertia measurement device based on single mass-block |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 200710061740CN101038299A (en) | 2007-04-21 | 2007-04-21 | Uniaxle integrated inertia measurement device based on single mass-block |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN101038299Atrue CN101038299A (en) | 2007-09-19 |
Family
ID=38889336
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 200710061740PendingCN101038299A (en) | 2007-04-21 | 2007-04-21 | Uniaxle integrated inertia measurement device based on single mass-block |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN101038299A (en) |
Cited By (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101270990B (en)* | 2008-05-06 | 2010-11-03 | 中北大学 | Testing apparatus of multi-layer nano-film tunneling micro-gyroscope |
| CN102095893A (en)* | 2009-11-18 | 2011-06-15 | 罗伯特.博世有限公司 | Method for determining the sensitivity of an acceleration sensor or magnetic field sensor |
| CN102435191A (en)* | 2011-09-28 | 2012-05-02 | 湖北航天技术研究院总体设计所 | Disassembly-free single-shaft self-calibration strapdown inertial measurement unit device |
| CN102597699A (en)* | 2009-08-04 | 2012-07-18 | 飞兆半导体公司 | Micromachined inertial sensor devices |
| CN101981457B (en)* | 2008-04-03 | 2013-06-19 | 大陆-特韦斯贸易合伙股份公司及两合公司 | Micromechanical acceleration sensor |
| US8739626B2 (en) | 2009-08-04 | 2014-06-03 | Fairchild Semiconductor Corporation | Micromachined inertial sensor devices |
| US8813564B2 (en) | 2010-09-18 | 2014-08-26 | Fairchild Semiconductor Corporation | MEMS multi-axis gyroscope with central suspension and gimbal structure |
| CN104297521A (en)* | 2013-07-19 | 2015-01-21 | 中国科学院地质与地球物理研究所 | MEMS high sensitivity transverse acceleration meter and manufacturing technology thereof |
| US8978475B2 (en) | 2012-02-01 | 2015-03-17 | Fairchild Semiconductor Corporation | MEMS proof mass with split z-axis portions |
| US9006846B2 (en) | 2010-09-20 | 2015-04-14 | Fairchild Semiconductor Corporation | Through silicon via with reduced shunt capacitance |
| US9062972B2 (en) | 2012-01-31 | 2015-06-23 | Fairchild Semiconductor Corporation | MEMS multi-axis accelerometer electrode structure |
| US9069006B2 (en) | 2012-04-05 | 2015-06-30 | Fairchild Semiconductor Corporation | Self test of MEMS gyroscope with ASICs integrated capacitors |
| US9094027B2 (en) | 2012-04-12 | 2015-07-28 | Fairchild Semiconductor Corporation | Micro-electro-mechanical-system (MEMS) driver |
| US9095072B2 (en) | 2010-09-18 | 2015-07-28 | Fairchild Semiconductor Corporation | Multi-die MEMS package |
| US9156673B2 (en) | 2010-09-18 | 2015-10-13 | Fairchild Semiconductor Corporation | Packaging to reduce stress on microelectromechanical systems |
| US9246018B2 (en) | 2010-09-18 | 2016-01-26 | Fairchild Semiconductor Corporation | Micromachined monolithic 3-axis gyroscope with single drive |
| US9278846B2 (en) | 2010-09-18 | 2016-03-08 | Fairchild Semiconductor Corporation | Micromachined monolithic 6-axis inertial sensor |
| US9352961B2 (en) | 2010-09-18 | 2016-05-31 | Fairchild Semiconductor Corporation | Flexure bearing to reduce quadrature for resonating micromachined devices |
| US9425328B2 (en) | 2012-09-12 | 2016-08-23 | Fairchild Semiconductor Corporation | Through silicon via including multi-material fill |
| US9444404B2 (en) | 2012-04-05 | 2016-09-13 | Fairchild Semiconductor Corporation | MEMS device front-end charge amplifier |
| US9488693B2 (en) | 2012-04-04 | 2016-11-08 | Fairchild Semiconductor Corporation | Self test of MEMS accelerometer with ASICS integrated capacitors |
| US9618361B2 (en) | 2012-04-05 | 2017-04-11 | Fairchild Semiconductor Corporation | MEMS device automatic-gain control loop for mechanical amplitude drive |
| US9625272B2 (en) | 2012-04-12 | 2017-04-18 | Fairchild Semiconductor Corporation | MEMS quadrature cancellation and signal demodulation |
| CN107271720A (en)* | 2017-05-18 | 2017-10-20 | 中北大学 | Eight beam 3-axis acceleration sensors of low inter-axis coupling degree |
| US10060757B2 (en) | 2012-04-05 | 2018-08-28 | Fairchild Semiconductor Corporation | MEMS device quadrature shift cancellation |
| US10065851B2 (en) | 2010-09-20 | 2018-09-04 | Fairchild Semiconductor Corporation | Microelectromechanical pressure sensor including reference capacitor |
| CN109613300A (en)* | 2018-12-19 | 2019-04-12 | 东南大学 | A Microsensor That Can Simultaneously Measure Vertical Acceleration and Angular Velocity |
| CN109613301A (en)* | 2018-12-19 | 2019-04-12 | 东南大学 | A Microsensor That Can Simultaneously Measure Horizontal Acceleration and Angular Velocity |
| CN111272162A (en)* | 2020-03-02 | 2020-06-12 | 扬州大学 | Single-mass three-axis MEMS gyroscope and preparation method thereof |
| US10697994B2 (en) | 2017-02-22 | 2020-06-30 | Semiconductor Components Industries, Llc | Accelerometer techniques to compensate package stress |
| CN112212850A (en)* | 2020-09-22 | 2021-01-12 | 诺思(天津)微系统有限责任公司 | Ring silicon gyroscope structure and its fabrication process and silicon gyroscope sensor |
| CN113391095A (en)* | 2020-03-12 | 2021-09-14 | 北京微元时代科技有限公司 | Single-mass full-symmetric triaxial silicon micro-accelerometer |
| CN114323395A (en)* | 2021-12-23 | 2022-04-12 | 西安交通大学 | MEMS six-axis force sensor chip based on SOI technology and preparation method thereof |
| CN114876995A (en)* | 2022-02-08 | 2022-08-09 | 上海交通大学 | Multidimensional self-adaptive vibration and noise control device |
| CN117192155A (en)* | 2023-11-02 | 2023-12-08 | 苏州敏芯微电子技术股份有限公司 | Single-mass triaxial MEMS acceleration sensor and electronic equipment |
| CN119246886A (en)* | 2024-08-21 | 2025-01-03 | 北京时代民芯科技有限公司 | A MEMS accelerometer with stress isolation function |
- 2007
- 2007-04-21CNCN 200710061740patent/CN101038299A/enactivePending
Cited By (50)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101981457B (en)* | 2008-04-03 | 2013-06-19 | 大陆-特韦斯贸易合伙股份公司及两合公司 | Micromechanical acceleration sensor |
| CN101270990B (en)* | 2008-05-06 | 2010-11-03 | 中北大学 | Testing apparatus of multi-layer nano-film tunneling micro-gyroscope |
| US8739626B2 (en) | 2009-08-04 | 2014-06-03 | Fairchild Semiconductor Corporation | Micromachined inertial sensor devices |
| CN102597699B (en)* | 2009-08-04 | 2015-07-08 | 飞兆半导体公司 | Micromachined inertial sensor devices |
| CN102597699A (en)* | 2009-08-04 | 2012-07-18 | 飞兆半导体公司 | Micromachined inertial sensor devices |
| CN102095893A (en)* | 2009-11-18 | 2011-06-15 | 罗伯特.博世有限公司 | Method for determining the sensitivity of an acceleration sensor or magnetic field sensor |
| US9278845B2 (en) | 2010-09-18 | 2016-03-08 | Fairchild Semiconductor Corporation | MEMS multi-axis gyroscope Z-axis electrode structure |
| US8813564B2 (en) | 2010-09-18 | 2014-08-26 | Fairchild Semiconductor Corporation | MEMS multi-axis gyroscope with central suspension and gimbal structure |
| US9246018B2 (en) | 2010-09-18 | 2016-01-26 | Fairchild Semiconductor Corporation | Micromachined monolithic 3-axis gyroscope with single drive |
| US10050155B2 (en) | 2010-09-18 | 2018-08-14 | Fairchild Semiconductor Corporation | Micromachined monolithic 3-axis gyroscope with single drive |
| US9455354B2 (en) | 2010-09-18 | 2016-09-27 | Fairchild Semiconductor Corporation | Micromachined 3-axis accelerometer with a single proof-mass |
| US9278846B2 (en) | 2010-09-18 | 2016-03-08 | Fairchild Semiconductor Corporation | Micromachined monolithic 6-axis inertial sensor |
| US9856132B2 (en) | 2010-09-18 | 2018-01-02 | Fairchild Semiconductor Corporation | Sealed packaging for microelectromechanical systems |
| US9352961B2 (en) | 2010-09-18 | 2016-05-31 | Fairchild Semiconductor Corporation | Flexure bearing to reduce quadrature for resonating micromachined devices |
| US9586813B2 (en) | 2010-09-18 | 2017-03-07 | Fairchild Semiconductor Corporation | Multi-die MEMS package |
| US9095072B2 (en) | 2010-09-18 | 2015-07-28 | Fairchild Semiconductor Corporation | Multi-die MEMS package |
| US9156673B2 (en) | 2010-09-18 | 2015-10-13 | Fairchild Semiconductor Corporation | Packaging to reduce stress on microelectromechanical systems |
| US9006846B2 (en) | 2010-09-20 | 2015-04-14 | Fairchild Semiconductor Corporation | Through silicon via with reduced shunt capacitance |
| US10065851B2 (en) | 2010-09-20 | 2018-09-04 | Fairchild Semiconductor Corporation | Microelectromechanical pressure sensor including reference capacitor |
| CN102435191B (en)* | 2011-09-28 | 2014-01-01 | 湖北航天技术研究院总体设计所 | Disassembly-free single-shaft self-calibration strapdown inertial measurement unit device |
| CN102435191A (en)* | 2011-09-28 | 2012-05-02 | 湖北航天技术研究院总体设计所 | Disassembly-free single-shaft self-calibration strapdown inertial measurement unit device |
| US9062972B2 (en) | 2012-01-31 | 2015-06-23 | Fairchild Semiconductor Corporation | MEMS multi-axis accelerometer electrode structure |
| US9599472B2 (en) | 2012-02-01 | 2017-03-21 | Fairchild Semiconductor Corporation | MEMS proof mass with split Z-axis portions |
| US8978475B2 (en) | 2012-02-01 | 2015-03-17 | Fairchild Semiconductor Corporation | MEMS proof mass with split z-axis portions |
| US9488693B2 (en) | 2012-04-04 | 2016-11-08 | Fairchild Semiconductor Corporation | Self test of MEMS accelerometer with ASICS integrated capacitors |
| US9069006B2 (en) | 2012-04-05 | 2015-06-30 | Fairchild Semiconductor Corporation | Self test of MEMS gyroscope with ASICs integrated capacitors |
| US9444404B2 (en) | 2012-04-05 | 2016-09-13 | Fairchild Semiconductor Corporation | MEMS device front-end charge amplifier |
| US10060757B2 (en) | 2012-04-05 | 2018-08-28 | Fairchild Semiconductor Corporation | MEMS device quadrature shift cancellation |
| US9618361B2 (en) | 2012-04-05 | 2017-04-11 | Fairchild Semiconductor Corporation | MEMS device automatic-gain control loop for mechanical amplitude drive |
| US9094027B2 (en) | 2012-04-12 | 2015-07-28 | Fairchild Semiconductor Corporation | Micro-electro-mechanical-system (MEMS) driver |
| US9625272B2 (en) | 2012-04-12 | 2017-04-18 | Fairchild Semiconductor Corporation | MEMS quadrature cancellation and signal demodulation |
| US9802814B2 (en) | 2012-09-12 | 2017-10-31 | Fairchild Semiconductor Corporation | Through silicon via including multi-material fill |
| US9425328B2 (en) | 2012-09-12 | 2016-08-23 | Fairchild Semiconductor Corporation | Through silicon via including multi-material fill |
| CN104297521A (en)* | 2013-07-19 | 2015-01-21 | 中国科学院地质与地球物理研究所 | MEMS high sensitivity transverse acceleration meter and manufacturing technology thereof |
| US10697994B2 (en) | 2017-02-22 | 2020-06-30 | Semiconductor Components Industries, Llc | Accelerometer techniques to compensate package stress |
| CN107271720A (en)* | 2017-05-18 | 2017-10-20 | 中北大学 | Eight beam 3-axis acceleration sensors of low inter-axis coupling degree |
| CN107271720B (en)* | 2017-05-18 | 2019-04-19 | 中北大学 | Eight-beam three-axis accelerometer with low inter-axis coupling |
| CN109613301A (en)* | 2018-12-19 | 2019-04-12 | 东南大学 | A Microsensor That Can Simultaneously Measure Horizontal Acceleration and Angular Velocity |
| CN109613300A (en)* | 2018-12-19 | 2019-04-12 | 东南大学 | A Microsensor That Can Simultaneously Measure Vertical Acceleration and Angular Velocity |
| CN111272162A (en)* | 2020-03-02 | 2020-06-12 | 扬州大学 | Single-mass three-axis MEMS gyroscope and preparation method thereof |
| CN111272162B (en)* | 2020-03-02 | 2022-03-29 | 扬州大学 | Single-mass block triaxial MEMS gyroscope and preparation method thereof |
| CN113391095A (en)* | 2020-03-12 | 2021-09-14 | 北京微元时代科技有限公司 | Single-mass full-symmetric triaxial silicon micro-accelerometer |
| CN112212850A (en)* | 2020-09-22 | 2021-01-12 | 诺思(天津)微系统有限责任公司 | Ring silicon gyroscope structure and its fabrication process and silicon gyroscope sensor |
| CN112212850B (en)* | 2020-09-22 | 2023-04-07 | 诺思(天津)微系统有限责任公司 | Annular silicon gyroscope structure, manufacturing process thereof and silicon gyroscope sensor |
| CN114323395A (en)* | 2021-12-23 | 2022-04-12 | 西安交通大学 | MEMS six-axis force sensor chip based on SOI technology and preparation method thereof |
| CN114323395B (en)* | 2021-12-23 | 2022-11-11 | 西安交通大学 | A kind of MEMS six-axis force sensor chip based on SOI process and preparation method thereof |
| CN114876995A (en)* | 2022-02-08 | 2022-08-09 | 上海交通大学 | Multidimensional self-adaptive vibration and noise control device |
| CN117192155A (en)* | 2023-11-02 | 2023-12-08 | 苏州敏芯微电子技术股份有限公司 | Single-mass triaxial MEMS acceleration sensor and electronic equipment |
| CN117192155B (en)* | 2023-11-02 | 2024-01-26 | 苏州敏芯微电子技术股份有限公司 | Single-mass triaxial MEMS acceleration sensor and electronic equipment |
| CN119246886A (en)* | 2024-08-21 | 2025-01-03 | 北京时代民芯科技有限公司 | A MEMS accelerometer with stress isolation function |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101038299A (en) | Uniaxle integrated inertia measurement device based on single mass-block | |
| US11808574B2 (en) | Micromechanical detection structure of a MEMS multi-axis gyroscope, with reduced drifts of corresponding electrical parameters | |
| CN1948906B (en) | Capacitive type complete decoupling horizontal axis miniature mechanical gyro | |
| CN104459181B (en) | A kind of bionical hair sensor sensitive for flow velocity, acceleration and angular speed | |
| US6910379B2 (en) | Out-of-plane compensation suspension for an accelerometer | |
| CN104698222B (en) | Three axle single-chip integration resonant capacitance formula silicon micro accerometers and its processing method | |
| CN104897147B (en) | A kind of MEMS three-axis gyroscopes | |
| CN103900545B (en) | Monolithic integration holohedral symmetry three-axis silicon micro-tuning fork gyroscope | |
| CN104807454B (en) | A kind of single-chip integration six degree of freedom micro inertial measurement unit and its processing method | |
| US20120125103A1 (en) | Z-axis capacitive accelerometer | |
| CN106932609A (en) | A kind of axle inertial sensors of four mass MEMS of single anchor point six | |
| US7069784B1 (en) | Pendulous in-plane MEMS accelerometer device | |
| CN101216498A (en) | Dual spindle differential capacitance type micromechanical accelerameter | |
| CN107063223A (en) | One chip Micromachined Accelerometer Based on Resonant Principle gyroscope arrangement | |
| CN113138292A (en) | Capacitance type micromechanical accelerometer | |
| CN102064021B (en) | Comb tooth capacitor of micromachine | |
| CN101759136A (en) | Fully-decoupled vibrating micromechanical gyroscope | |
| CN115407084B (en) | A comb-tooth capacitive accelerometer | |
| CN201852851U (en) | Framed capacitive silicon micromachined accelerometers | |
| CN101792108A (en) | Large capacitance micro inertial sensor based on slide-film damping and manufacturing method thereof | |
| CN101746708A (en) | Complete coupling capacitance type micromachined gyroscope | |
| CN100338470C (en) | Single chip double inertia parameter accelerometer gyroscope | |
| CN112014597A (en) | Triaxial resonance capacitance type micro-electromechanical accelerometer | |
| RU2251702C1 (en) | Micromechanical accelerometer | |
| CN116907466A (en) | Microelectromechanical three-axis gyroscopes and electronic devices |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |