
サクサク読めて、
アプリ限定の機能も多数!
アプリで開く
FIREFLY is a set of comprehensive software tools dedicated to bridging the gap between Grasshopper - (a free plug-in for Rhino) - the Arduino microcontroller and other input/output devices like web cams, mobile phones, game controllers and more.It allows near real-time data flow between the digital and physical worlds – enabling the possibility to explore virtual and physical prototypes with unpr

シャープが提供する測距センサユニットの、CMOSタイプ<アナログ出力(I2C出力も含む)>の製品情報を掲載しています。

バージョン情報 Arduino Uno , Arduino IDE 1.0.5 , processing 1.5.1 ,windows 8.1 実験内容は前回と同じ アナログセンサ : フォトリフレクタ ↓ Arduino ↓PC : processingでグラフ化 前回作ったアニメーションするグラフを、ただの折れ線グラフから時間軸を考慮した散布図に変えようと思ったところ、沢山はまったのでメモっておこう。 【Arduinoのスケッチ】 前回はserial.write()で1Byteデータを送信するのみだった部分を、serial.println()に変更し時間とデータをカンマでつないだ文字列として送信。 int analog_in = 0; int val = 0; String str_send_data; unsigned long sTime = 0; //プログラム開始時間 un
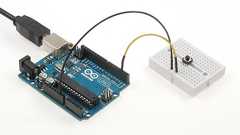
バージョン情報 Arduino Uno , Arduino IDE 1.0.5 , processing 1.5.1 ,windows 8.1 Arduinoを使ってシリアル通信を試してみた。 今回の実験内容 アナログセンサ : フォトリフレクタ ↓ Arduino ↓PC : processingでグラフ化 写真 回路図 【Arduinoのスケッチ】 今回のコードは、センサからの入力を40msec毎に1byteのバイナリデータとして送信するのみ。(受信はせずに強制的に送信し続ける。) int analog_in = 0; //アナログピン A0 byte val = 0; unsigned long sTime = 0; void setup() { Serial.begin(9600); } void loop() { sTime = millis(); val = analogR

サンプルプログラムのダウンロード サンプルプログラムは下記からダウンロードしてください。 サンプルプログラム(Githubにリンク) ProcessingとArduinoの連携: シリアル通信を自作する方法 (先週のつづき) 次に、ArduinoとProcessingのもう一つの連携方法について試していきましょう。次に試す手法は、Arduino、Processing双方でシリアル通信のためのコードを自作して、通信の仕組み自体を自作していく方法です。Firmataを使用する方法に比べてきめ細かく効率的な通信が可能となります。また、Processing 2.0でも問題なく作動します。このワークショップで最終的に使用するToucheセンサーに関しても、このシリアル通信を自作する方法を用います。 今回のシリアル送受信には「ハンドシェイキング(handshaking)」という手法を使用してみます。ハ

実験1 加速度をグラフ表示 ※この実験は、Arduino基礎と同様にArduino IDEとProcessing IDEをセットアップした状態を前提としている。 ①Arduinoプログラムの書き込み 1-1. ArduinoのSketch(プログラム)を開く File > Sketchbook > AcceloratorSerial 1-2. プログラム解説 /* nakayasu 2013.12 */ int sensorValue[3]; int outputValue[3]; int inByte = 0; // incoming serial byte void setup() { for(int k=0; k<3; k++){ sensorValue[k] = 0; outputValue[k] = 0; } //シリアル通信 Serial.begin(9600); whil

float a_in; // アナログ入力値(0〜203) floattemp_c = 0; // 摂氏値( ℃ ) void setup(){ Serial.begin(9600); // シリアル通信速度 } void loop(){ // アナログピンから計測値を取得(0〜203) a_in = analogRead(0); // 入力値を摂氏に換算temp_c = ((5 * a_in) / 1024) * 100; // 改行しながら出力 Serial.println(temp_c ); // 1000ms待機 delay(1000); } # -*- coding:utf-8 -*- import serial import datetime def main(): i = 0 ser = serial.Serial("COM5") # Arduinoが接続されているコ

HOME >> 鉄道模型実験室 > 距離センサーを使う 鉄道模型実験室 距離センサーを使う ■ はじめに 先回の実験「動力車の発進時や停止時の動き」でも述べているように、発進や停止時の動きを的確に把握するには、速度データが必要であると考えている。 模型車両に触れずに測定するにはスピードガンなどの道具があるものの、ホビーとしては高価な道具となってします。 また、精度的にも問題ありそうです。 そこで位置情報を距離センサでセンシングして車両の動きを把握する方法を検討してみたのでその結果を報告する。 . ■ 距離センサーの選択 距離センサーにはいろいろなタイプがあるが、ホビーとして手軽に使用出来るものとして、シャープ製の測距モジュールを使ってみることにした。 何よりも出力がアナログである点に注目したのである。 センサーの出力を Arduino のアナログ入力端子に接続するだけで簡単に使えそうであ

Arduino IDE 1.0.1からの新機能でpinMode関数の第2引数にINPUT_PULLUPキーワードが使えるようになっています。この機能、便利なんですけどあまり知られていないのかもと思い、改めてご紹介いたします。 Arduino IDE のメニューから「ファイル」→「スケッチの例」→「02.Digital」→「Button」をクリックすると、タクトスイッチや押しボタンスイッチを押している間、LEDが光るスケッチが開かれます。本当に基本的なボタンの使い方ですね。スケッチの先頭に配線方法が書かれています。 /* Button Turns on and off a lightemitting diode(LED) connected to digital pin 13, when pressing a pushbutton attached to pin 2. The circui
Welcome to Let's Make Robots, the robotics community by RobotShop. You’ll find here a vibrant community of knowledgeable and friendly robotics enthusiasts. Ourgoal is to offer a place which will foster insightful, respectful, helpful, and most of all fun conversations.Join our giant family made of thousands of other passionate people like you. We can't wait to read you.
リリース、障害情報などのサービスのお知らせ
最新の人気エントリーの配信
処理を実行中です
j次のブックマーク
k前のブックマーク
lあとで読む
eコメント一覧を開く
oページを開く





